深层月壤钻取冗余绕组电机控制方法
2021-08-29 06:05王迎春王国欣王书超
深空探测学报 2021年3期
王迎春,王国欣,赵 帆,张 鼐,王书超
(北京卫星制造厂有限公司,北京 100094)
引 言
钻取系统用于获取深度不小于2 m的深层月壤样品并返回,钻进预定的深度是任务成功实现的前提条件。在深层月壤获取的过程中,因月壤环境载荷复杂导致其具有较强的不确定性特征,钻取采样装置通过螺旋钻具回转转动实现深层月壤钻进取芯,学者们设计了专门的月壤钻进回转机构用以对钻进过程螺旋钻具回转转速进行精确控制并提供足够的回转转矩[1-4]。为了提高系统的可靠性和安全性,采用双绕组直流无刷电机作为螺旋钻具回转的驱动源,其可靠性对整个任务的成败有着至关重要的影响。
针对双绕组直流无刷电机的控制问题,开展了的大量研究,周元钧[5]研究了基于方波磁场、双通道结构的双绕组直流无刷电机的数学模型,分析了转矩特性,闫浩[6]对双绕组直流无刷电机的两相绕组电流均衡问题进行了研究,分析电流不均衡产生的原因与导致的后果,并在MATLAB/Simulink仿真环境下建立了仿真模型,然而,目前国内外学者尚未针对双绕组直流无刷电机的双绕组同步控制策略开展研究,因此,为克服深层月壤载荷复杂未知条件对月面钻取采样的影响,实现钻进取芯过程的可靠驱动控制,需要对双绕组直流无刷电机的控制性能开展研究。
本文针对深层月壤环境复杂载荷工况对螺旋钻具回转的驱动控制需求,为实现低速大扭矩启动和高速切削排土的使用需求,充分高效利用系统的有限资源,采用双绕组直流无刷电机作为螺旋钻具的驱动源,建立了双绕组直流无刷电机转矩与转速数学模型,设计了一种可适应双绕组直流无刷电机的驱动电路拓扑结构方案,开展了仿真分析并结合样机开展了实验研究。
1 月壤钻进采样方案与力载特性分析
1.1 月壤钻进采样方案
自20世纪60年代开始,美国、前苏联、欧洲航天局(European Space Agency,ESA)与日本等开展了月球、火星及小行星的采样返回探测任务[4]。地外星体探测经验表明钻进取芯是采集深层星壤的一种行之有效的方法[7-8]。
钻取系统采用螺旋钻进取芯手段获得深层月壤样品。通过驱动加载机构卷筒转动实现对加载钢丝绳的卷绕与释放,钢丝绳带动钻进机构沿导轨上下进给运动;钻进机构通过内部大功率电机驱动螺旋钻具进行回转运动,从而实现深层月壤钻进的进给回转切削功能,方案如图1所示。
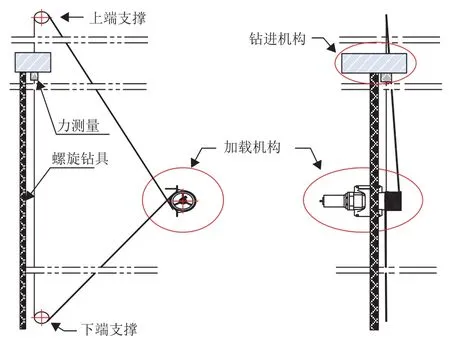
图1 月壤钻进采样原理Fig.1 Diagram of -lunar soil drilling sample
1.2 月壤钻进力载特性分析
月球表面覆盖着一层由岩屑、粉末、角砺和撞击熔融玻璃等组成的结构松散、成分复杂的风化层–月壤。月壤是在氧气、水、风和生物活动都不存在的条件下,通过陨石和微陨石撞击、宇宙射线和太阳风持续轰击以及大幅度昼夜温差导致岩石因热胀冷缩破碎等共同作用于月球表面而形成的[9]。已有成果表明,除了极少数陡峭的山脉、撞击坑和火山通道的峭壁之外,整个月球表面几乎都覆盖着一层厚度不均的月壤层。月壤层的厚度大致与月表年龄呈线性关系,年龄越老则通常月壤层越厚,如月海区的平均厚度约为4~5 m,而高地区的平均厚度约为10~15 m[10-12]。
美国和前苏联较早对月球进行了探测,并获取了一定量的月壤样本,根据公布的资料可知,不同的月球区域深度,月壤的力学特性差距较大且月岩与颗粒状月壤在深度方向上分布有一定的随机性。月壤的主要物理力学性质包括月壤的成分、颗粒的粒径和形貌、月壤密度、孔隙度、压缩特性、剪切强度以及粘聚力和内摩擦角等,这些参数均对月壤钻进采样过程的力载特性产生影响,月壤的力学特性及钻进机构的性能决定了深层月壤钻取的能力[7,9],Apollo 17带回来的月壤的颗粒形态如图2所示。前苏联“月球24号”(Luna-24)在钻进过程中,由于钻进负载过大造成钻机报警和被迫停钻无法再次启动的问题,因此,在月球探测器携带资源有限条件下,为了实现安全可靠钻进取芯任务,如何提高螺旋钻具的载荷驱动能力并获取尽可能多的月壤样品是月面钻进取芯亟待解决的关键技术。
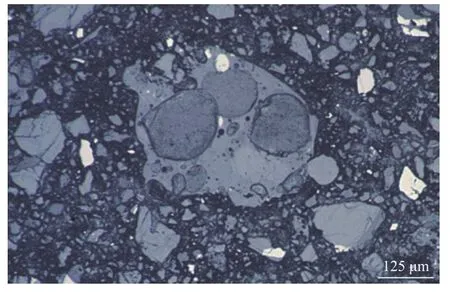
图2 Apollo 17月壤的颗粒形态[11]Fig.2 Granular morphology of Apollo 17 lunar soil[11]
2 双绕组电机转矩与转速数学模型
2.1 双绕组直流无刷电机
采用大功率直流无刷电机作为螺旋钻具回转运动的力矩驱动源,以利用其启动力矩大、转速高、体积小等优点。针对宇航型号产品的轻量化和高可靠性设计需求,直流无刷电机采用了一体式双绕组冗余设计方案,为了有效地降低复杂月壤载荷对直流无刷电机运动稳定性的影响,系统对电机采用基于PID算法的“转速”和“电流”双闭环控制策略,从简化控制模型和降低控制难度的角度出发,主份绕组与备份绕组参数设计状态一致[13],双绕组直流无刷电机实物图如图3所示,电机性能参数表1所示。

图3 双绕组直流无刷电机实物图Fig.3 The Redundant winding BLDC
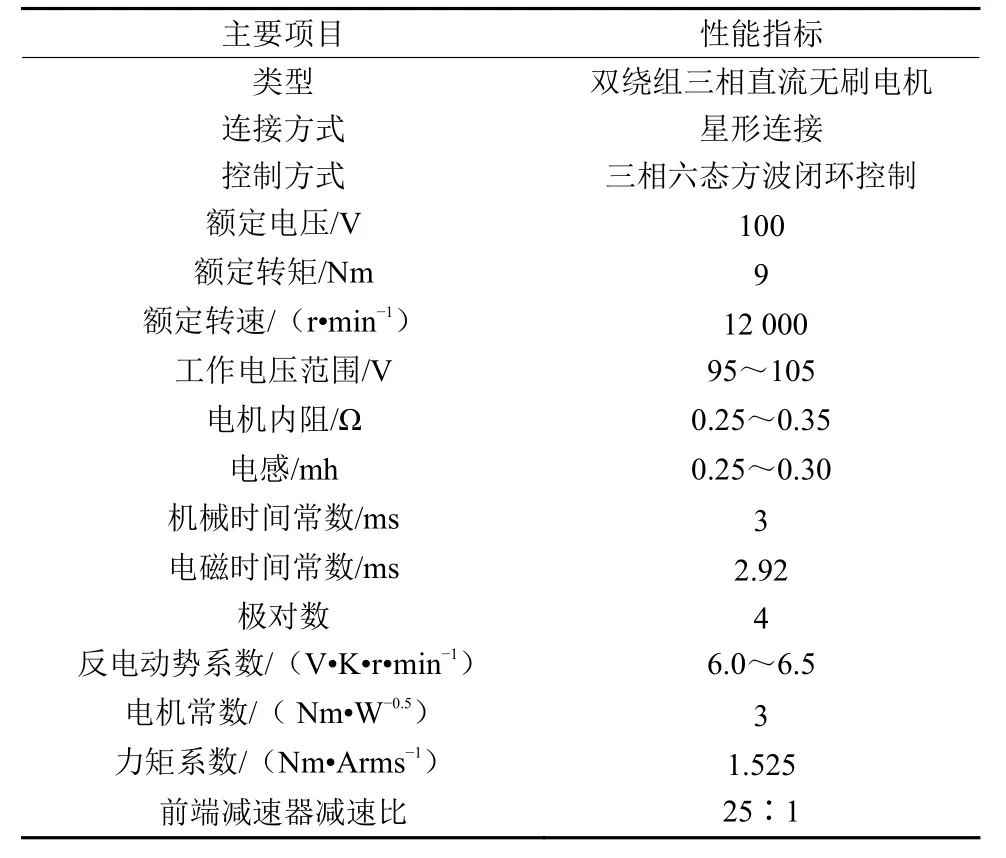
表1 电机性能参数Table 1 Motor performance parameters
2.2 双绕组电机转矩与转速数学模型
为了便于分析,假设:①定子三相绕组完全对称,空间互差120°电角,参数相同;②忽略定子铁心齿槽效应的影响;③忽略功率器件导通和关断时间的影响;④忽略功率器件的导通压降;⑤忽略定子绕组电枢反映的影响;⑥电机气隙磁导均匀,认为磁路不饱和,不计磁滞损耗与涡流损耗[5,14]。
2.2.1 电压方程
分析双绕组直流无刷电机运行过程中转矩和转速的数学模型,首先分析单套三相绕组电机的数学模型根据图4可以得到三相绕组电压方程为
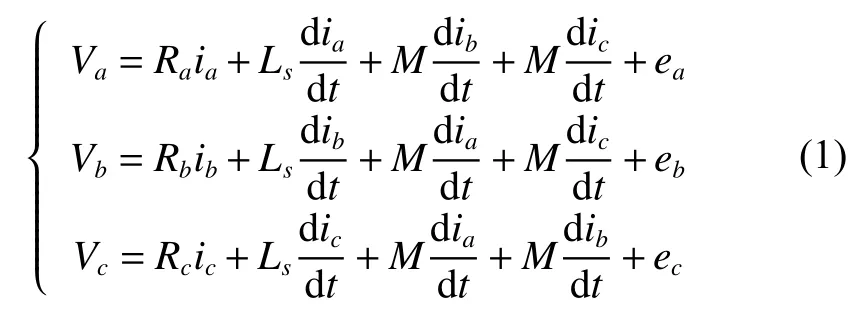
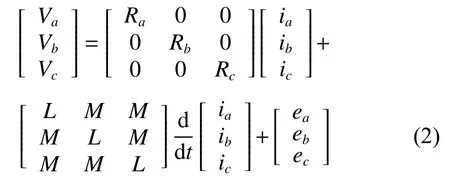
其中:Va、Vb、Vc为定子三相绕组相电压;Ra=Rb=Rc为定子每相绕组电阻;ia、ib、ic为定子三相绕组相电流;ea、eb、ec为定子三相绕组每相反电势;Ls、M为定子每相绕组自感和两相绕组间的互感。
可得:
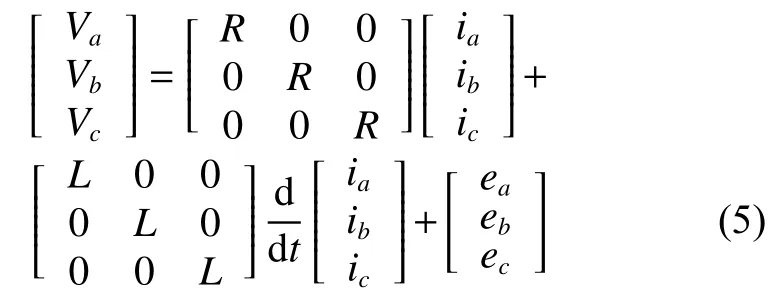
电机采用三相星型连接方式,因此三相绕组的电流之和等于0,故不存在零轴电流分量即
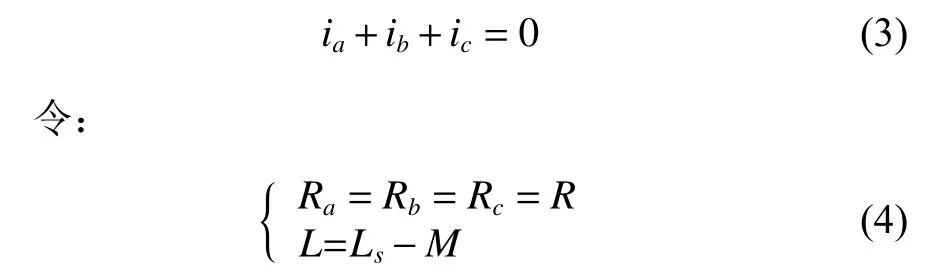
式(2)为单相等效电感
各相绕组的反电势为

其中:θe为转子转过电角度;ω 为转子机械转速;p为电机级数。
2.2.2 转矩与速度数学模型
电机的电磁转矩为

在忽略开关导通压降的影响,电机输出电磁转矩可表示为

其中:Te为输出电磁转矩;θe为转子转过电角度;ω为转子机械转速;KT为转矩系数;KE为反电势系数;VS为驱动供电电压;ES为反电动势电压;p为电机级数。
双绕组直流无刷电机运行过程中转矩和转速的关系可表示为

其中:KTm主份绕组转矩系数;KTa为备份绕组转矩系数;KEm为主份绕组反电势系数;KEa为备份绕组反电势系数;Rm为主份绕组单相电阻;Ra为备份绕组单相电阻。
在仅有主份绕组工作过程中,理想情况下,电机最大输出速度和转矩可表示为
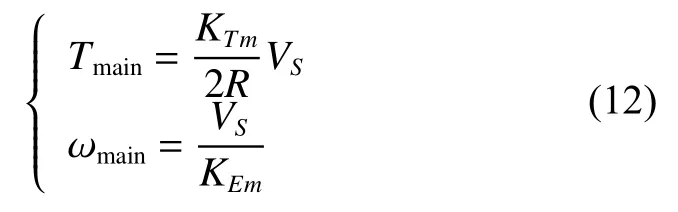
当主份绕组与备份绕组同时工作时,电机启动转矩可表示为
通过对比转矩Tdual、Tmain可知,双绕组同时工作的输出转矩大于单绕组工作输出转矩。
当主份绕组与备份绕组同时工作时,在未施加负载转矩情况下,Tdual=0,电机输出转速值最大,可知

推导可得
为了实现大启动转矩并同时具备高转速输出的能力,双绕组电机在设计过程中,设计为主份绕组线圈匝数小于备份绕组线圈匝数,保证主份绕组反电势系数和转矩系数小于备份绕组反电势系数和转矩系数。主份绕组与备份绕组同时工作,可输出大启动转矩;只有主份绕组工作时,可输出高转速。但主份绕组和备份绕组参数的不一致性,对于控制精度需求较高的系统,会为系统闭环控制的实现增加一定难度。
3 驱动电路拓扑结构
为了提高双绕组电机的低速载荷驱动输出能力,需要双绕组同时工作时,增大扭矩输出,图5和图6给出了两种传统直流驱动电路拓扑结构,对于图5所示的驱动电路拓扑结构,只有当主份绕组工作时,备份绕组产生反电势电压,备份绕组感应电流通过驱动电路续流二极管形成反向电流回路,产生阻碍电机转动的扭矩,影响电机正常工作;对于图6所示驱动电路拓扑结构,主份绕组和备份绕组分别采用两套独立的驱动电路,通过软件程序驱动控制主份绕组和备份绕组同时工作,对于软件生成的脉冲宽度调制技术(Pluse Width Modulation,PWM)控制脉宽调制脉冲、不同型号的金属–氧化物–半导体场效应晶体管(Metal Oxide Semiconductor,MOS)器件,导通、关断时间存在差别,导致主份绕组和备份绕组工作的同步性难以精确控制。
图5 两相绕组驱动电路耦合工作电流回路Fig.5 Two phase winding driving circuit coupling working current loop
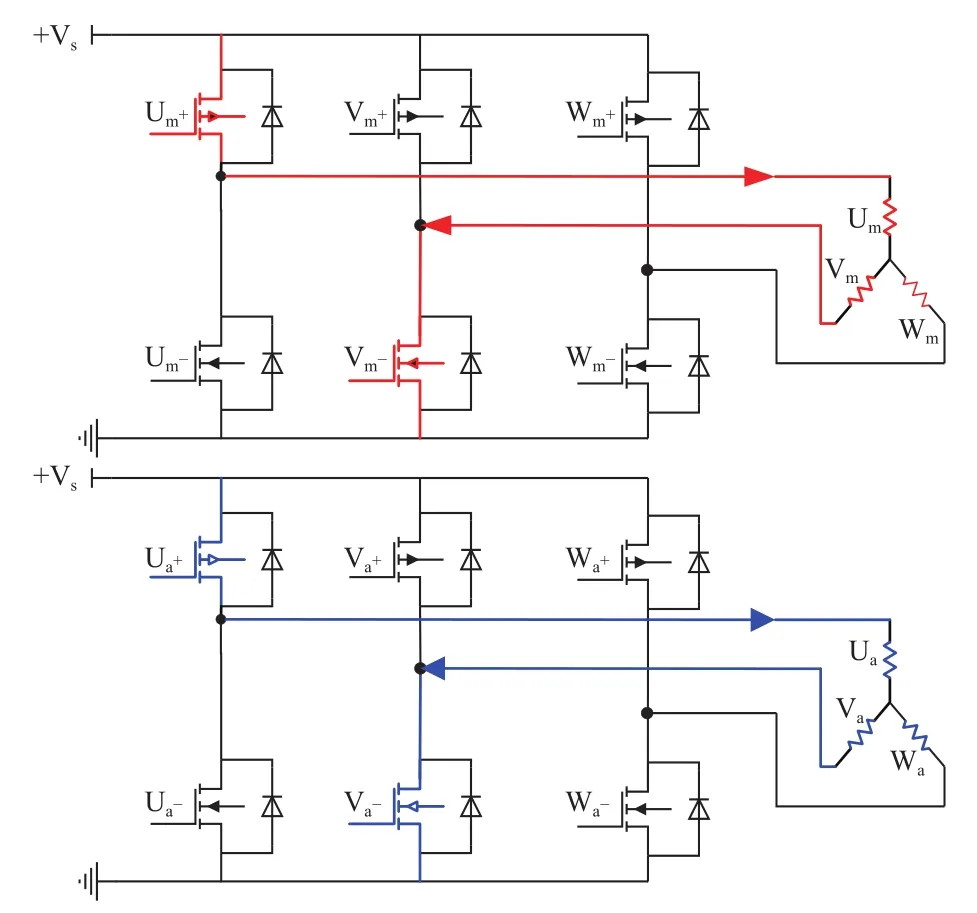
图6 两相绕组驱动电路独立工作电流回路Fig.6 Independent working current loop of two phase winding driving circuit
图7给出了主份绕组工作时,备份绕组产生的反电势电压波形。
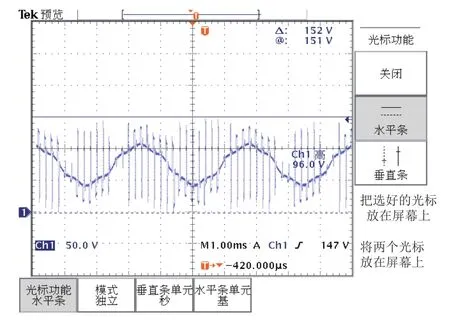
图7 主份绕组工作备份绕组反电势电压波形图Fig.7 Back EMF voltage of backup winding as primary system swinding
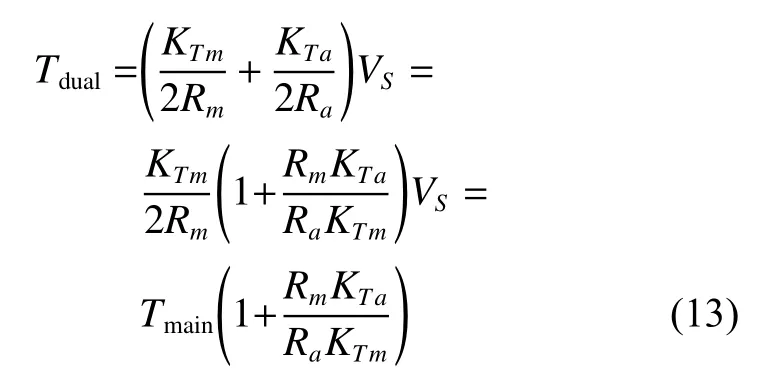
为了在低速启动过程中,克服深层月壤载荷不确定性给系统造成的风险,有效利用双绕组同时工作的扭矩输出能力,消除单绕组工作过程中备份绕组反电势对电机工作的影响,图8给出了一种全新的驱动电路拓扑结构。驱动电路共设计了9个转换开关,与供电电源端相连的3个MOS管为P沟道MOS管;与供电电源回线端相连的3个MOS管为N沟道MOS管;中间的N沟道MOS管与4个二极管形成一组,用于控制双份绕组的工作状态,MOS管的D极和S极电压由绕组控制,G极电压由外部电压控制,表2给出了电机相序与转换开关通断时序关系。
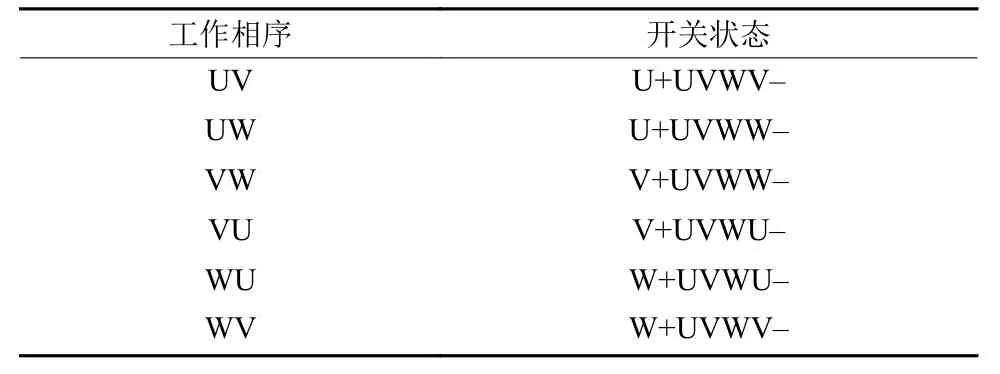
表2 电机相序与转换开关通断时序真值表Table 2 The motor phase sequence and on-off sequence of transfer switch
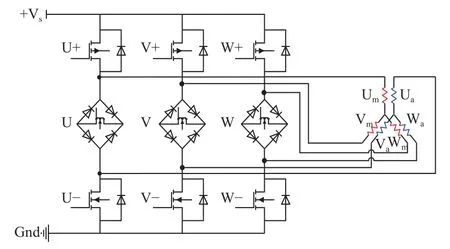
图8 双绕组驱动电路拓扑结构图Fig.8 Diagram of dual winding drive circuit
如图9所示,电机在低速工作过程中,双份绕组同时工作,转换开关U+、U、V、W以及V–开通,电流通过主份绕组和备份绕组的U、V两相绕组。
随着电机转速的升高,备份绕组反电势电压逐渐升高,当与备份绕组相连的N沟道MOS管S极电压大于G极电压时,中间的N沟道MOS管自动关断,电流不能流过备份绕组,如图10所示。在高速工作区,备份绕组不能形成回路,不会产生影响电机工作的反向转矩。
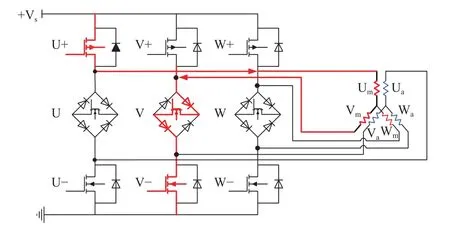
图10 主份绕组工作电流回路Fig.10 The current circuit of main winding
4 系统仿真与性能实验
4.1 系统仿真
该双绕组直流无刷电机采用三相六态方波控制方式,通过调制PWM占空比对电机转速进行无级调节,霍尔信号经过逻辑运算得到开关管的导通逻辑,与PWM信号产生控制信号送入三相H桥功率驱动电路。
为了实现对螺旋钻具回转转速的高精度控制,系统对直流无刷电机采用转速电流双闭环控制方式,其中转速环为外环,通过霍尔信号进行转速计算;电流环为内环,通过霍尔电流传感器进行绕组电流的精确采集。转速调节器采用PI调节器,其输入为给定的电机转速,输出作为电流环的参考值,电流环也采用PI调节器,调节电流参考值与实际电流的稳态误差,最终电流环的输出决定了PWM脉宽调制信号的占空比参数,从而实现系统的闭环稳定运行[14],控制系统原理框图,如图11所示。
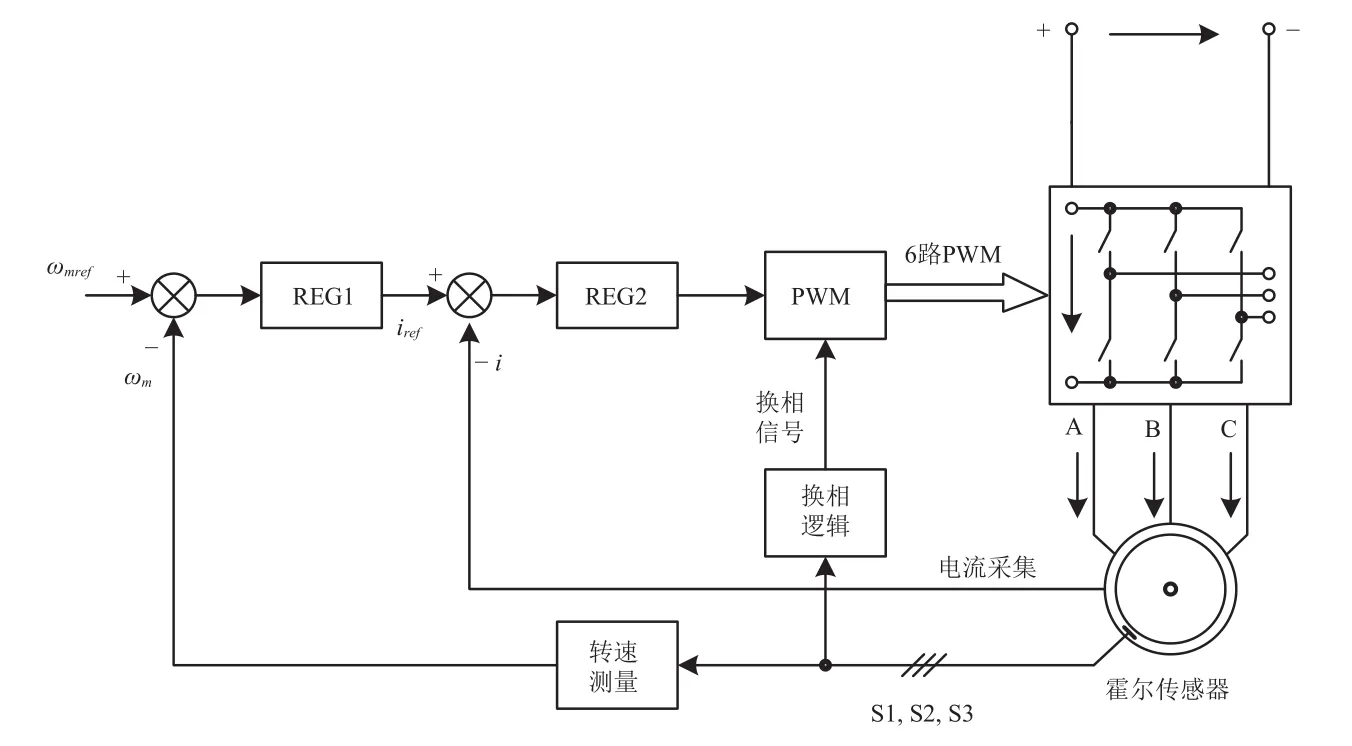
图11 电机闭环控制框图Fig.11 Motor closed loop control block diagram
利用MATLAB/Simulink环境下对本文设计的双绕组直流无刷电机拓扑驱动电路结构进行控制方式仿真分析,建立仿真模型,如图12所示,仿真结果给出了转速n、单相绕组电流以及电磁输出转矩Tm、Ta、Te曲线。
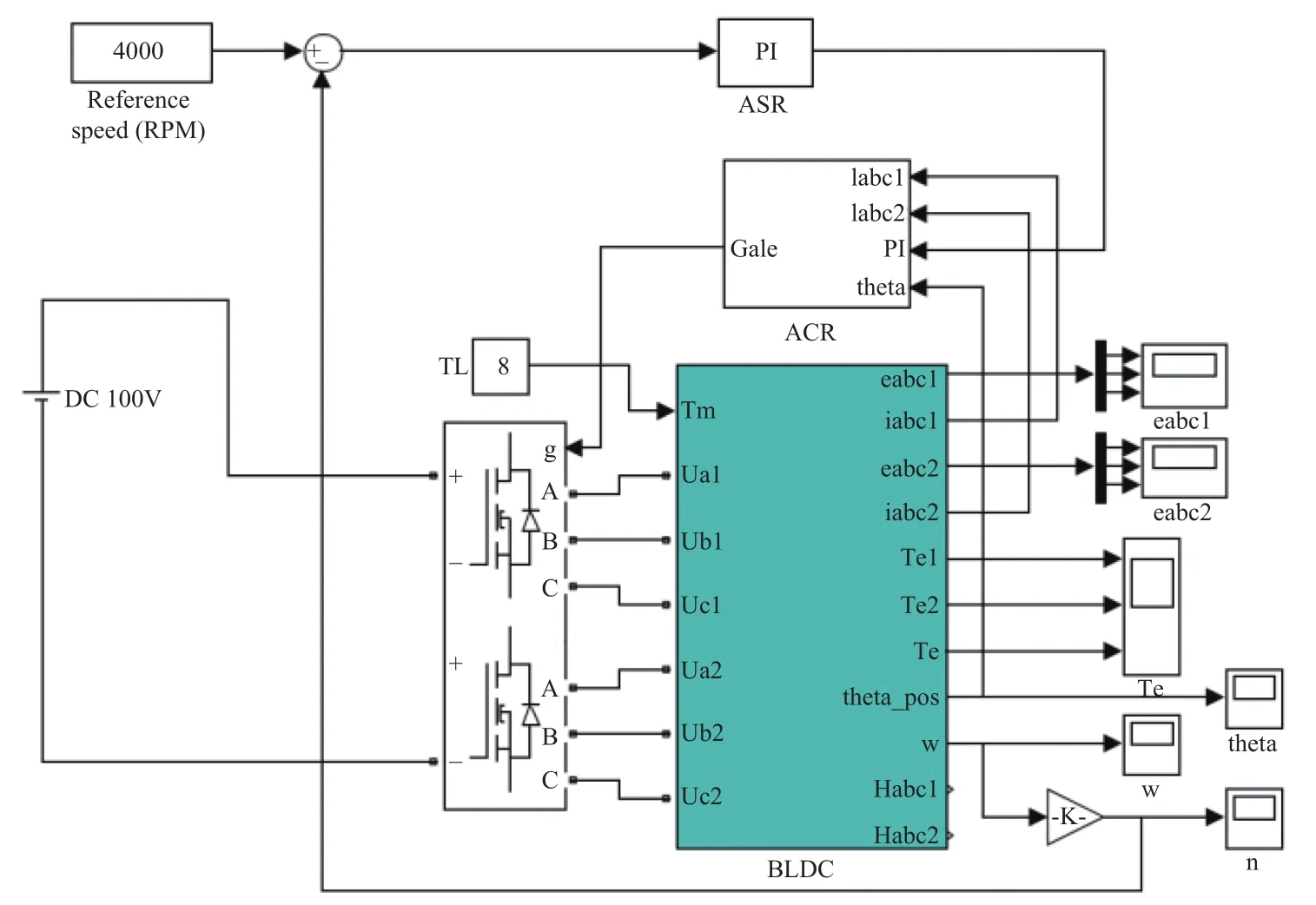
图12 仿真模型框图Fig.12 Simulation model
4.1.1 双绕组低速工作仿真分析
在电机低速工作状态下,对主份绕组与备份绕组同时工作进行仿真分析,通过将驱动电路中间的3只MOS器件处于闭合状态,在电机低速启动过程中备份绕组工作,8 N•m载荷带载启动,结果如图13所示。

图13 主份与备份绕组同时工作仿真波形Fig.13 Double working simulation waveform
4.1.2 双绕组升速工作过程仿真分析
对电机升速过程中主份绕组与备份绕组同时工作进行仿真分析,在电机低速工作过程中,驱动电路中间的3只MOS器件处于常闭状态,当电机转速升高至6 000 r/min时,驱动电路中间的3只MOS器件更改为断开状态,电机最大转速1.2万 rpm,8 N•m载荷带载启动,结果如图14所示。
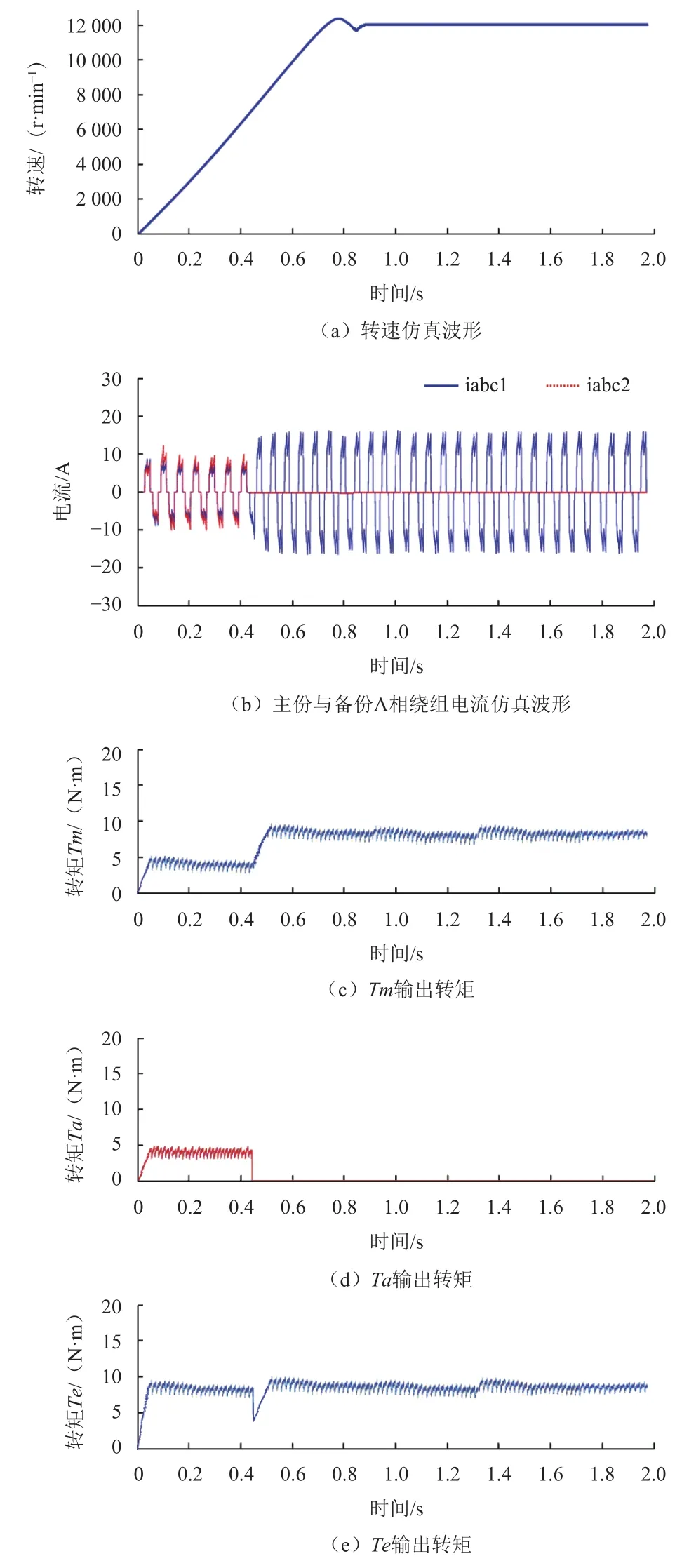
图14 主份与备份电机升速工作过程仿真波形Fig.14 Simulation of main and backup motors during speed increasing
4.2 实验系统构建与结果
4.2.1 模拟负载驱动控制实验
回转电机前端安装减速比为25∶1的减速器,形成回转驱动部件,回转驱动部件通过减速比为4∶1的减速器将回转转矩和转速传递至取芯钻具输出,后文涉及到的相关实验均以回转驱动部件或钻取采样装置实验样机为整体进行实验测试。
为了验证回转电机主份绕组和备份绕组分别在不同载荷条件下的带载性能,采用电机模拟负载专用测试设备对回转驱动部件主份绕组和备份绕组同时工作的转速控制精度、带载稳定性等性能指标进行测试,实验系统组成如图15所示,实验实物状态如图16所示。
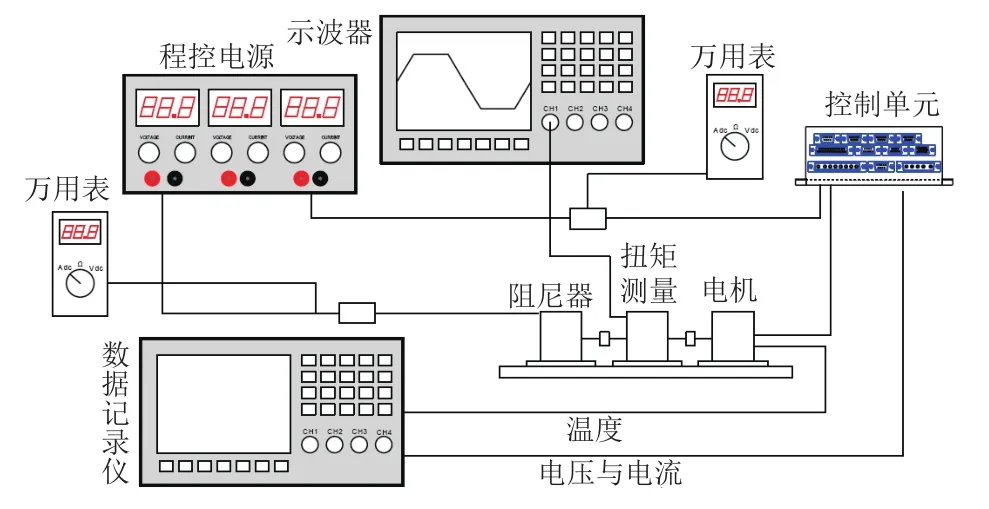
图15 模拟负载实验系统组成示意图Fig.15 Schematic diagram of simulation load experiment system
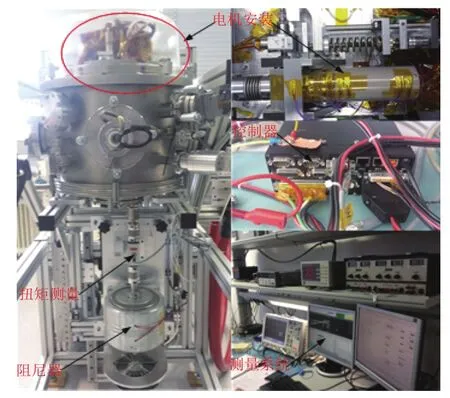
图16 模拟负载实验实物图Fig.16 The picture of simulated load experiment
在实验过程中,对回转电机输出端施加5 N•m模拟负载载荷,回转电机低速启动直至转速增加至12 000 r/min,实验过程中,电机速度曲线如图17所示,绕组电流波形如图18所示。
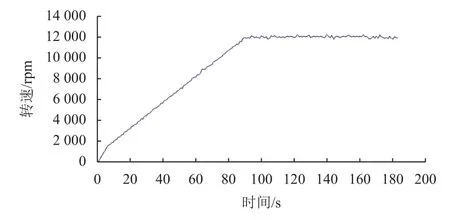
图17 电机速度曲线Fig.17 Motor speed
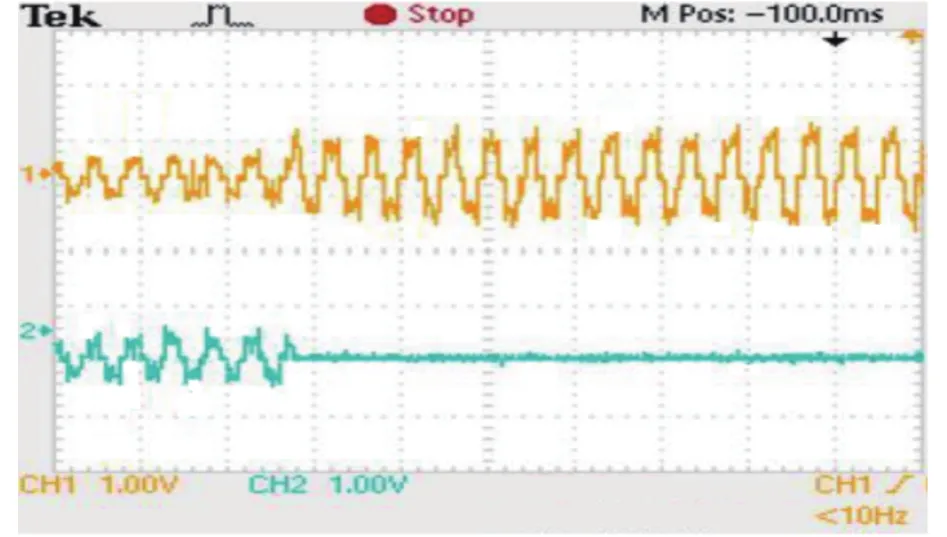
图18 绕组电流波形曲线Fig.18 Winding current
4.2.2 模拟月壤钻取实验
采用地面标称模拟月壤作为钻进对象开展了月壤钻进过程回转驱动控制性能实验,月壤钻进实验系统如图19所示。实验过程中采用的模拟月壤应特性[1]如下:
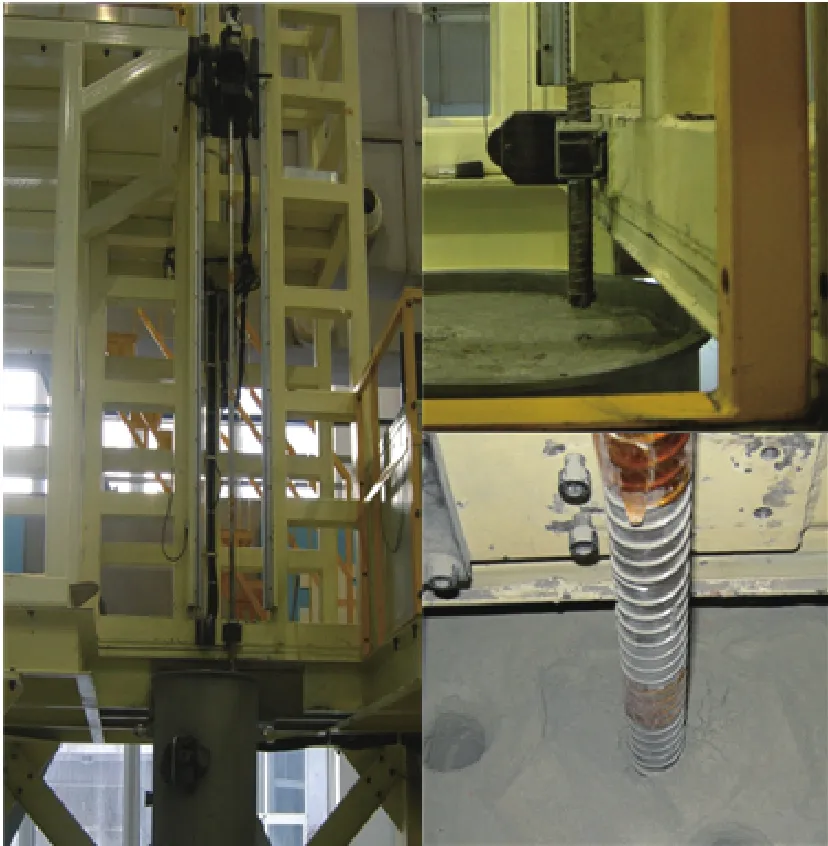
图19 月壤钻进实验过程Fig.19 drilling process of lunar soil
1)基础原料:1 mm粒径以上的颗粒原料选用玄武岩,1 mm粒径以下的颗粒原料可以选用玄武岩或玄武质火山渣;
2)颗粒形态:棱角状、次棱角状;
3)粒径分布(重量百分比):粒径小于1 mm的颗粒比例为85.00%,粒径1~2 mm的颗粒比例为5.00%,粒径2~4 mm的颗粒比例为3.50%,粒径4~10 mm的颗粒比例为3.50%,粒径大于10 mm的颗粒比例为3.00%;
4)平均相对密度:模拟月壤的相对密度为99%±2%;
5)含水量:<1%。
采用标称模拟月壤开展了10次月壤钻取实验,实验过程中电机转速和母线电流关系曲线如图20所示获得样品质量不低于257 g,满足样品获取基本成功的标准要求,实验过程中,回转转速控制精度优于5%,输出转矩满足2 m月壤钻进的需求。
5 结 论
本文针对深层月壤载荷未知条件,系统采用双绕组直流无刷电机作为取芯钻具回转运动的驱动源,充分高效利用系统的有限资源,既提升了钻进取芯过程的可靠驱动控制,又实现了低速大扭矩启动和高速切削排土功能;建立了双绕组直流无刷电机转矩与转速数学模型,采用驱动电路拓扑结构设计方案,并建立了仿真分析模型,分别对双绕组低速工作、双绕组升速工作两种工作状态进行了仿真分析,获取了电机输出转速、绕组电流以及输出电磁转矩的特性,取得了良好效果,结果表明系统性能稳定、可靠度高,该控制方法已在工程中得到成功应用;分别针对模拟负载驱动控制和模拟月壤钻取等两种状态开展了相关实验,实验效果良好,电机运行稳定,具备模拟月壤未知载荷条件的钻进回转驱动能力,满足使用的需求。
猜你喜欢
军事文摘(2022年18期)2022-10-14
小哥白尼(趣味科学)(2022年6期)2022-08-17
九江学院学报(自然科学版)(2022年2期)2022-07-02
机电信息(2022年9期)2022-05-07
计算机仿真(2021年11期)2021-12-10
青少年科技博览(中学版)(2021年11期)2021-03-07
微特电机(2020年11期)2020-12-30
北京航空航天大学学报(2020年10期)2020-11-14
电子制作(2019年10期)2019-06-17
电子制作(2017年1期)2017-05-17