基于无人机影像的乡村道路信息提取及安全导引优化设计
2021-08-29 07:50:30李旭亮王保成
导航定位学报 2021年4期
李旭亮,王保成,田 亮,李 媛,方 飞
(兰州交通大学 土木工程学院,兰州 730070)
0 引言
乡村村道路快速发展对丰富基础交通网络、加快经济发展、降低贫困等具有重要意义。近年来,随着我国经济的快速发展,乡村扶贫道路也在急剧增长。但是,乡村道路普遍具有隐蔽路口多、行人横穿公路频繁、路况突变性大、车辆占道停放和行驶等突出特点,另外交通安全设施的缺乏缺失、基础道路盲目扩张对交通产生的压力也在急剧增长,是行人和车辆出行的重大安全隐患。乡村不断发生的交通事故让人们认识到乡村道路的交通安全是目前亟待解决的问题。本文以此为背景,将无人机应用到农村扶贫道路数据的信息提取当中,利用无人机灵活、简便的优点,既可解决农村道路复杂多变而相关数据不易获取的问题,又可节省大量的人力物力,进而有利于做交通安全导引优化。
随着科技的发展和进步,借助大数据进行高分辨率影像提取成为相关领域的目标,其中道路提取技术是近年的热门研究方向。国外大约在20 世纪70 年代就已经开始初步探索[1],专家学者利用各种技术对道路的提取方法进行了深入探讨。通过对一些道路提取资料的学习与研究,可将该提取方法分为全自动道路提取法和人机结合的半自动道路提取法[2-8]。全自动法的研究虽然是未来的主要趋势,但由于现阶段计算机水平的限制尚难实现;半自动法采用人机交互的处理方式可以灵活应用于不同复杂度的场景中。本文以无人机为影像拍摄载体,以半自动道路提取为主要方法,以易康为操作平台,研究探讨利用无人机影像进行乡村道路提取的方法。
1 无人机飞行参数
本文以甘肃省榆中县小康营乡刘褚营村为研究对象。刘褚营村为河流冲击地带,整体地势平坦,周围无高大树木遮挡。该村房屋错落有序、整齐,建筑物高度低,地表物区分度高,有利于减少无人机自身携带的误差和环境气候误差,使实验数据更具有真实客观性。
利用大疆 MAVICPRO 机型获取实测数据。该机型体积不大,操作灵活方便,数据采集高效,影像成形快速,能够基本完成一般的测绘任务。MAVICPRO的基本数据如表1 所示。

表1 大疆MAVICPRO 型参数
为航测成图及图像拼接,采集数据时无人机飞行重叠区域正向设为70%,侧向设为60%。地面控制终端为影像获取载体附属软件设Atizure。软件中无人机航迹如图1 所示。

图1 无人机航向轨迹
2 数据处理
将多张影像组合在一起形成一张整个区域的影像图时,由于影像图中的各种地物与地面地物的特征是有差别的,因此需要对其进行几何校正[9-10]。这种差别亦是后期需要调整图像质量的原因。
几何校正就是对在不同的坐标系之间转换的过程中产生的坐标不一致进行修正。经过处理的图像如图2 所示。

图2 刘褚营村无人机影像
在进行影像信息提取之前,先对本次实验取得的无人机影像预先处理,即进行影像融合以及增强。融合是将图像不同空间、时间的冗余信息进行重组,使其包含内容更加丰富。增强是将图像灰度调整均匀,道路特征更加明显。图3 为预处理以后的图像。
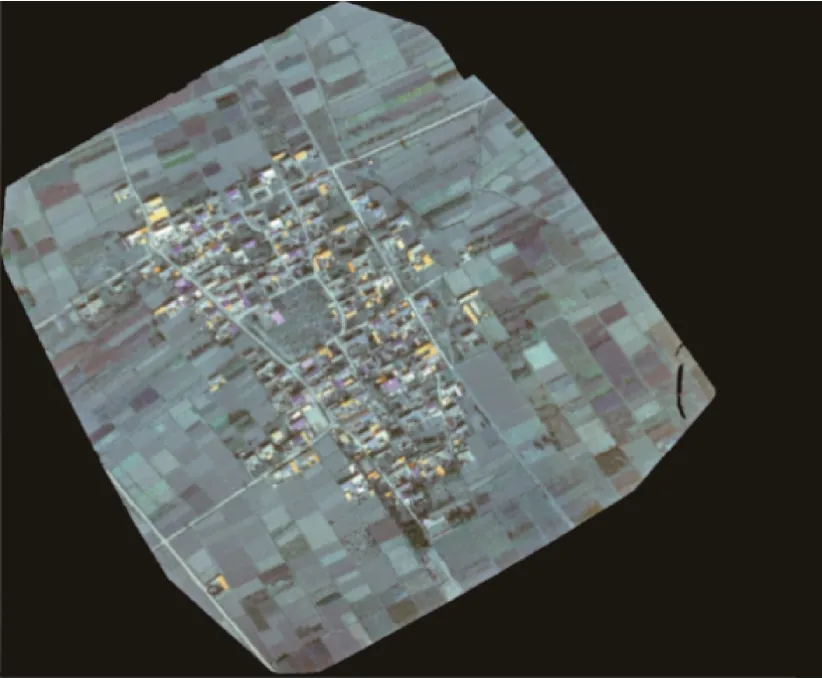
图3 预处理图像
3 多尺度分割法
要对空间上非相邻的区域进行合并,运算量变得相当巨大。为解决运算量问题,发展出了迭代分而治之的多尺度分割近似计算以及相应的有效实现方式[11-12]。
多尺度分割是通过设定波段、光谱、纹理、几何形状、紧致度等各因子参数来确定最适合的分割尺度,来实现影像分割的方法[13-14]。能输出一个从初始化分割直至一个区域的分割的多尺度序列,在这个序列中,一个特定的对象既可以表示成几个区域从而具有较好的细节信息,也可以与其他对象一起被一个区域吸收。
3.1 最优分割尺度
多尺度分割方法是面向对象的。它表示在分割影像时对异质性靠近的区域进行合并,也叫分型网络演化算法。其实质是对相互靠近的像元进行属性识别,判断是否能够进行合并。图4 为多尺度分割步骤。图中:f表示异质数值;s表示给定的参数值。若f小于s,则继续分割;若f大于s,则分割完成。这个分割过程是重复的,一直到整幅影像图全部分割完成[15]。

图4 多尺度分割算法的具体流程
在多尺度法分割影像时,分割尺度的大小对分割结果的准确度会产生重要的影响,尺度大小会影响分割后影像对象的大小及其所包含的信息。因此若要对目标对象进行提取就必须熟悉目标,而且要选取合适的分割尺度。
结合刘褚营村乡村道路比较窄小,大约有5 m宽,且本文所选取的影像图为无人机高分辨影像图的情况,综合考虑无人机精度及研究地域面积大小等因素,根据处理经验可选用100 作为1 个初始分割值,分别以100、150、200、300 作为本次实验的分割参数值来进行验证。形状指数暂定为0.5,紧致度指数暂定为0.5。分割结果如图5 所示。

图5 100~400 分割值效果
从图中可以看出,在形状因子参数和紧致度因子参数都不变的情况下,随着尺度值的增大,分割完成后得到子对象的表面形状面积也在不断地增加。当分割尺度设置为300 时,在分割完成后的图像中,道路形状较完整且清晰。道路两旁的建筑物与树木在道路上的投影较少,为接下来的道路信息提取减少了数据处理的工作量。因此认为300 是本次道路信息提取实验的比较合理的分割尺度值。
3.2 形状因子和光谱因子
除了分割尺度外,形状因子和光谱因子也可以影响道路信息提取。为取得形状因子和光谱因子在道路信息提取过程中的优值,同样设置4 组参数值来进行尺度分割实验,分别为(0.9,0.7)、(0.1,0.9)、(0.9,0.1)、(0.5,0.5)。其中:括号中的第1 个值为形状因子参数;第2 个值为光谱因子参数。尺度参数为300。分割结果如图6 所示。

图6 4 种形状参数分割结果
从图中可以看到,当分割尺度参数不变时,形状因子参数和紧致度因子参数不一致,分割后的影像结果也不同。因此得出几何指标和紧致度指标对影像的分割效果是很重要的。通过上述4 组参数组合,在分割尺度一致的情况下,经过实验数据对比,发现第3 组实验数据是分割效果最好的,因此在基于面向对象的无人机影像道路提取中将分割参数设定为300,形状和紧致度设为(0.9,0.1),作为本次道路提取的最优数值。
4 道路提取
4.1 道路样本特征与提取规则
遥感影像分割完成后,将相同属性的元素排列组合成目标对象。根据目标对象自身属性特征,以及面向对象的相邻关系特征,借助易康(eCognition)软件,实现对乡村道路的信息提取。
为了将我们所需的道路目标与遥感影像中其他的背景地物完整地分离出来,就要充分利用影像中的道路特征来做理论支撑。另外为了验证道路特征选取的合理与否,随机选取多个道路样本来进行特征对比分析,并得出道路样本提取规则集,如表2 所示。

表2 道路样本提取规则集
4.2 道路提取
在易康软件中,将分割参数设定为300,形状因子组合为(0.9,0.1),得出分割结果。分割完成后,接下来进行样本特征选取,分别为道路样本和耕地样本。
运用最邻近分类算法,在进行分类操作时,易产生漏分、错分的现象,进而使实验结果产生误差,致使道路信息自动提取的结果不能满足精度要求。为解决漏分错分的问题,需要在分类后进行人工解译识别,进行2 次分类优化操作,将错分漏分的目标对象划分到自身属性类别中去,并对提取结果进行再生长、收缩等多重优化以减少道路轮廓误差。最终结果如图7 所示。

图7 优化提取结果
4.3 实验精度评价
在基于eCognition 软件提取操作完成以后,要进行效果评价,通过目视解译采用建立混淆矩阵的方式来进行,并分析分类的总体精度指数和卡帕(Kappa)系数。误差矩阵如表3 所示。
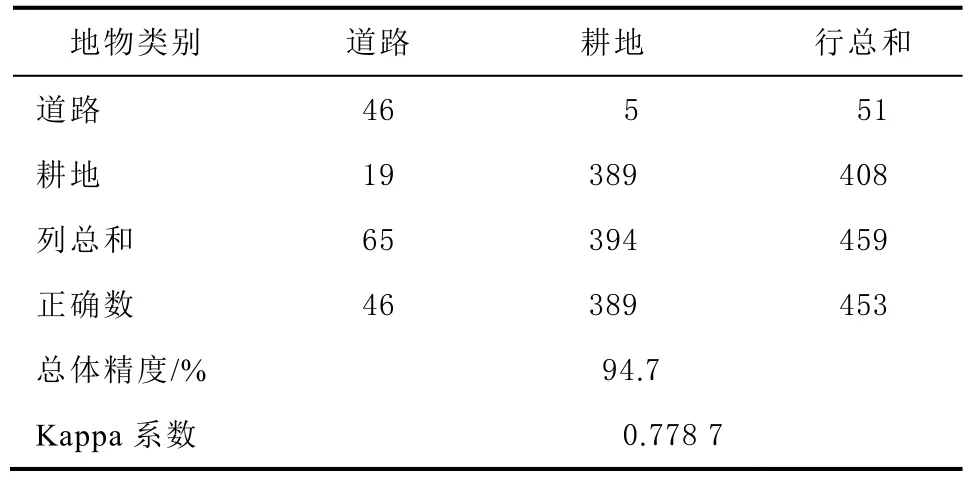
表3 集误差矩阵分析结果
从表中可以看出,本次实验中样本的总体分类精度达到了94.77%。Kappa 系数为0.778 7。整体的分类效果达到了预期要求。因此,利用eCognition 软件对农村扶贫道路进行面向对象的道路信息提取是可行的。
5 乡村道路安全导引优化设计
以上文所得乡村道路提取结果为依据,得出需要做安全导引优化设计的道路及相关参数,参照相关设计规范分析计算路基宽度、道路建筑限界、行车视距等的合理取值,从而提高道路交通的安全性。
该村主干道路有2 条,一条呈南北走向直线穿越该村,另一条呈东西走向深入该村。主干道路基宽度5 m,左右各有0.5 m的净空,行车道宽度4 m,全道路路段为单行道,全村路段无护栏等隔离设施。机动车平均车速低于50 km/h。
该村道路的特点主要为长直线,但交叉道口较多。其中十字交叉路口有3 个,T 字型交叉路口8 个。道路路面情况较差,没有配置道路交通安全设施,道路交叉口交通情况极为复杂,导致交通事故多发;因此需要科学谋划、统筹管理。为此先将缺失的交通安全设施补充完整,再设置合理的道路交通标志标线。先以2 维平面图的形式,对2 条主干道及交叉口进行交通设施规划。紧接着对村庄整体道路从入口到出口以车辆行驶方向为导引,做出整体道路的全面优化。利用软件生成3 维村庄道路优化模型,以立体方式将最终的安全导引效果呈现出来。
为减少及消除长直线路段的交通安全隐患,根据公路工程技术标准和道路交通标志和标线中关于交通安全设施设置方法的规定[16-17],乡村道路长直线段交通安全导引优化设计的方法如下:
1)在主干道上勾画出行车中线及轮廓线,限定车辆的行驶路线,减少车辆行驶的干扰;
2)村口处设置前方村庄、注意危险的警告标志,告知驾驶人员前方路侧为村镇,提醒驾驶员谨慎驾驶以防发生交通事故;
3)设置限速40 km/h 标志与限速标线相配合,用来降低车辆在乡村主干道的车速;
4)村口处及路口设置停车让行标志及减速带,强制减小村口以及路口出入车辆行驶速度,确保出入口交通安全;
5)全路段设置减速慢行警告标志,提醒驾驶员减速慢行;
6)乡村道路主干道与支线道路交叉口设置人行横道,降低因村民横穿道路而引发的交通事故;
7)在斑马线前30~50 m 处设置斑马线提示标识,告知驾驶员前方路段有村民横穿公路;
8)长直线路段设置路侧护栏,提高道路两边住户的安全。
具体优化设计示意图如图8 所示。

图8 长直路段优化示意图
为减少和消除村内村民生活路段的交通安全隐患,该道路安全导引优化设计如下:
1)设置限速40 km/h 标志与限速标线相互配合,用来降低车辆在乡村主干道的车速;
2)村民生活区人流量大,所以全路段设置减速慢行警告标志以及禁止掉头标志,提醒驾驶人减速慢行防止驾驶员在人流量大的地方随意掉头,影响居民生活区道路交通安全;
3)斑马线前30~50 m 处设置斑马线提示标识,告知驾驶员前方有行人横穿公路;
4)在道路上勾画出行车中线及轮廓线,限定车辆的行走路线,减少相互间的交通干扰;
5)生活区道路两侧设置人行道及护栏,全路段设置减速带;
6)为了防止夜间行人及行车的不安全,生活区全路段全部配置照明路灯。具体优化示意图如图9 所示。

图9 村民生活区路段优化示意图
为减少和消除村内道路交叉口的安全隐患,需遵循主干道优先,且村庄路段中以主路转弯向侧路和侧路转弯沿主路2 种视距形式,将无人机影像处理数据代入处理,得出优化解。
1)侧路转主路视距测算公式为

式中:ISD 为交叉路口沿主干道视距;v为汽车行驶速度;t为侧路转弯等待时间。
2)主路转侧路视距测算公式为

式中:S为道路口沿侧路视距;a为侧路减速度,取值为3.0 m/s2;v为侧路行驶速度;t为识别时间,取值为2.5 s。
实验村庄中,主路段设计时速为40 km/h。从安全角度出发,车辆计算速度为设计时速的90%,取36 km/h。文中对于侧路定位为让行道路,由于侧路段是生活区路段,因此取行驶速度10 km/h。主干道转弯所需视距S=8 m,主干道停车视距S=46 m,侧路停车视距S=36 m,构建出交叉路口通视三角区,如图10 所示。
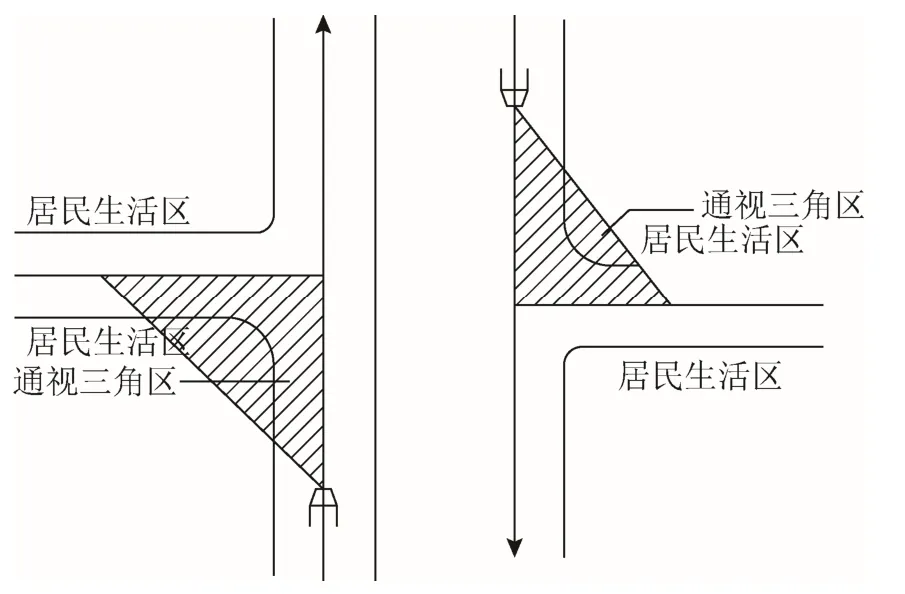
图10 交叉口通视三角区
依据道路交通标志和标线的有关规定[17],通视三角形内不能有障碍物阻挡驾驶员的视野。通过走访调查,刘褚营村的主干道与侧路之间路口视线不通畅,周围布满建筑房屋。发现实际路段通视三角形内存在障碍物,阻碍驾驶安全。因此本段交叉口的视距不满足视距安全的指标,需要采取相应的优化措施。应在此位置加大交通管理力度,采取设置诱导标志、减速标志、减速带、斑马线、交通凸面镜以及转弯行驶时鸣笛等措施。T 形路口优化后的3 维可视化效果如图11 所示。

图11 T 字交叉口优化
以规范及道路实际状况为依据,优化整个村庄的所有道路,最后以二维平面图的形式呈现出来。如图12 所示。
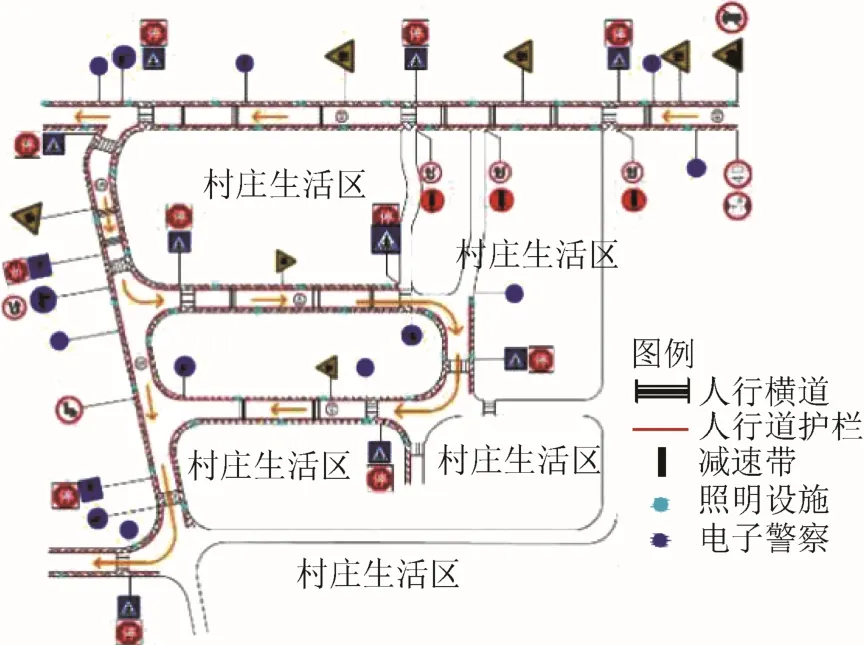
图12 村庄道路整体优化
以2 维平面图为基础导入软件,将村庄道路的优化设计以3 维模型的形式展现出来。
首先,当车辆行驶到村庄入口处时,安全导引如图13 所示。

图13 村口处安全导引优化
其次,在汽车驶入居民生活区路段时,交通安全设施的优化设计如图14 所示。
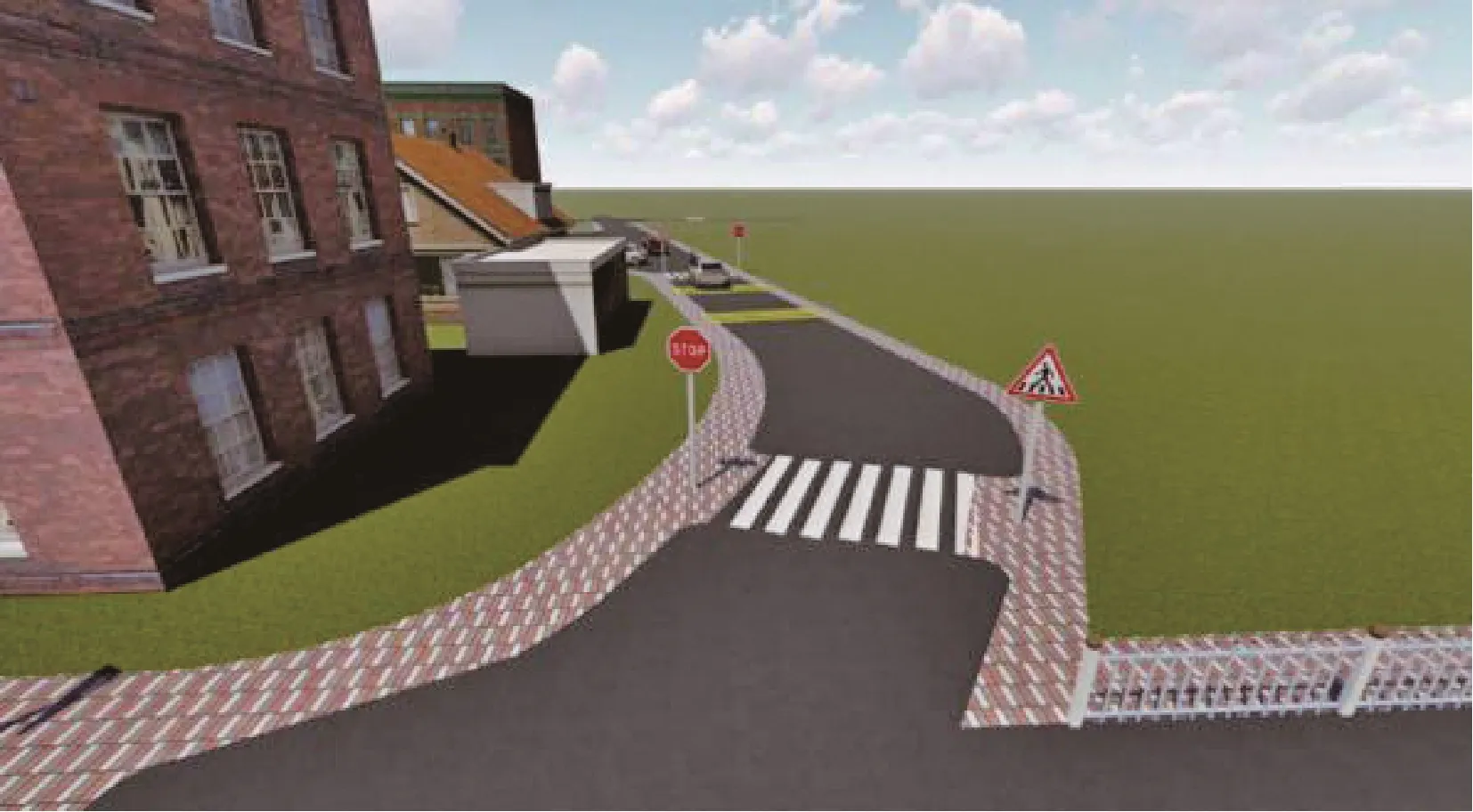
图14 交叉口安全导引优化
再次,当车辆行驶到村中心时,对村委会道路交叉口的安全导引细节如图15 所示。

图15 村委会交叉口安全导引优化
最后,以3 维全景视图的形式对整个刘褚营村的乡村道路安全导引优化进行展示,如图16所示。

图16 褚营村道路整体安全优化
6 结束语
本文采用的面向对象的提取方法是以图像为前提来进行研究的,因此图形质量直接影响道路提取的结果。本文所选的影像为无人机所拍摄的影像,图像中地物目标复杂,背景区分大,但道路两侧的树木在道路上的投影大大影响了道路信息提取的精度。如何解决这个问题还要进一步研究。
1)影像的分割尺度对道路提取的准确度影响很大,利用多尺度分割法显然分割效果较好。
2)本文在进行最邻近分类时,出现了错分和漏分的现象。主要原因可能是在这一点上这2 类目标地物的特征差异较小,比较相似。因此须研究是否可以利用其他的方法对分类以后的结果进行校正,以提高目标对象的分类精度。
3)本文研究对象区域的道路提取并不复杂,旨在体现半自动提取法的优势及验证其精度是否能达到预期要求,为更为复杂多变的乡村道路提取提供参考。
4)就目前而言,对乡村道路修建等级和标准以及交通安全设施设置方法方面的规定较少,只能参考道路设计规范和准则上面的零星知识。其次由于条件所限,对交通事故分析的原始数据较少,样本不够丰富。在因素分析中环境因素参与度较低。在导引设计中只从安全角度出发,没有考虑其经济性。
猜你喜欢
工会博览(2022年5期)2022-06-30 05:30:18
当代陕西(2022年4期)2022-04-19 12:08:50
小猕猴学习画刊(2022年3期)2022-03-28 16:33:01
中国交通信息化(2021年2期)2021-07-22 07:34:40
IEEE/CAA Journal of Automatica Sinica(2021年2期)2021-04-22 03:54:26
青年歌声(2020年12期)2020-12-23 06:30:00
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06 09:08:52
建材发展导向(2019年11期)2019-08-24 06:34:56
太空探索(2016年5期)2016-07-12 15:17:55
读写算·高年级(2015年1期)2015-07-25 02:22:00