
倒车雷达防撞系统的设计
2021-08-28 09:49李红岭张华贾尚云杨梅高晓阳
农业装备与车辆工程 2021年8期
李红岭,张华,贾尚云,杨梅,高晓阳
(730070 甘肃省 兰州市 甘肃农业大学 机电工程学院 )
0 引言
随着汽车数量逐年增加,原来空旷的路边被各种私家车挤满,停车位置变得越来越少,停车场地越来越拥挤。很多时候的停车位前后都停有车,并且两车中间的距离对于停车来说也非常逼仄,这种情况就非常考验驾驶员的技术和经验。在停车过程中,驾驶员不仅要观察与后面车辆的距离,更是要留意与前车的距离,这就分散了驾驶员的注意力,一不小心就会发生剐蹭事故,整个倒车过程对驾驶员来说劳力伤神。本文结合智能化技术,设计了电路简单、成本较低、功能实用的倒车雷达系统,为驾驶员尤其经验不足的驾驶员停车困难问题提供了解决方案。
1 设计方案
本次设计以低成本、低功耗的AT89C52 单片机作为系统的控制中心[1],对系统的各个电路进行协调和控制。系统主要是由单片机最小系统、超声波测距模块、显示电路和语音播报电路、温度传感器、按键等几部分组成,系统框图如图1 所示。超声波的发射与接收选用谐振频率为40 kHz 的HC-SR04 超声波集成模块,此电路的优点在于所需外围元件少、电路简单、具有非常好的稳定性以及很强的可靠性;液晶显示屏选用LCD1602,该显示屏价格便宜,电路连接简单,用于显示车身与障碍物间的距离;语音播报电路采用NV02C 芯片来实现,可以在倒车过程中很好地进行实时语音提示[2-5]。
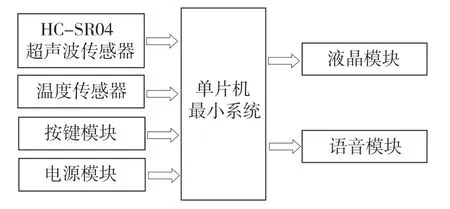
图1 系统框图Fig.1 System block diagram
2 硬件电路设计
2.1 单片机最小系统设计
单片机最小系统的原理图如图2 所示,主要是由单片机控制、复位电路、晶振电路3 部分构成。单片机是整个倒车雷达的中心,本设计选择的是由ATMEL 公司生产的高性能、低功耗、低成本的8 位集成单片机AT89C52。复位电路相当于单片机的重启系统,在单片机发生跑飞时,按下复位按钮单片机开始重启,结束跑飞。晶振电路主要产生振荡脉冲,控制单片机有节奏地工作。
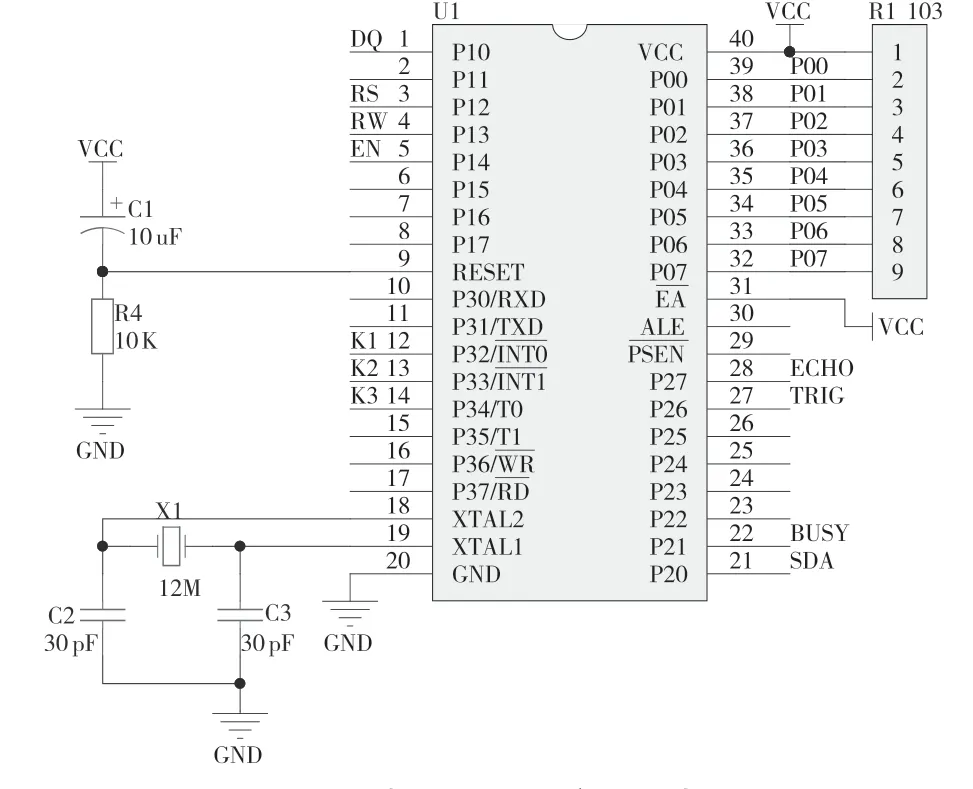
图2 单片机最小系统接口电路Fig.2 Minimum system interface circuit of single chip microcomputer
2.2 超声波测距电路
该模块电路主要通过超声波传感器发送和接收超声波[6],来检测驾驶员在倒车时汽车车身与障碍物之间的距离,并将检测到的信号传送到单片机中进行处理和输出。集成的超声波测距芯片HC-SR04,其测距电路都集成在一个芯片上,可以让系统变得更为简单。该芯片集成了超声波的发射器、接收器和控制电路,性能优越,价格便宜,在工作时只需要接收到一个10 μs 的高电平信号,该模块就会开始工作。而且该模块采用分体式的探头,发射探头和接收探头之间有一定的距离,使得该超声波传感器的盲区比一体式探头的超声波传感器要小很多。与单片机的接口电路如图3 所示。
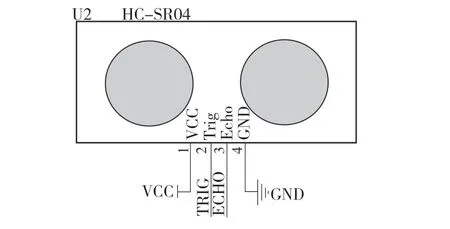
图3 超声波测距电路Fig.3 Circuit of ultrasonic ranging
2.3 语音提示电路
语音模块电路如图4 所示,主要是对车身与障碍物之间的距离进行播报,通过语音提示让驾驶员更清楚地了解车辆后方的状况,让驾驶员对车辆与障碍物的距离有更直观的了解,以达到降低倒车难度的目的。倒车雷达系统中语音播报系统的出现,从根本上改变了人们倒车的方式,从原来的只能从视觉上获取车辆后方信息,变成了现在的眼耳并用的方式,一定程度上提高了驾驶员在倒车过程中遭遇意外时的反应速度。
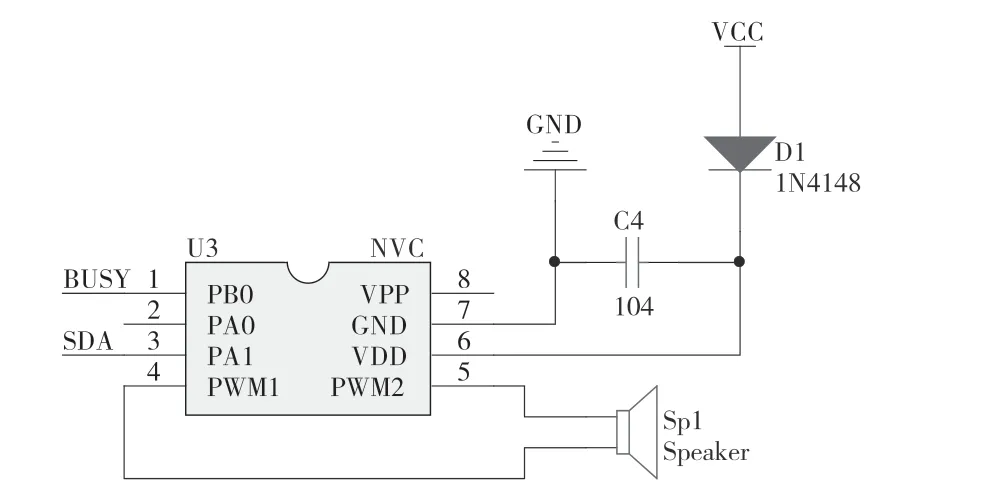
图4 语音提示电路Fig.4 Circuit of voice prompt
2.4 温度测量电路
不同温度下超声波在空气中的传播速度是不相同的,如果采用定值计算[7],如式(1):

式中:s——车身与障碍物的距离,m;T——温度传感器测得的当前环境的温度,℃;t——测得超声波的往返时间,s。
在环境温度与标准温度差距较大时,系统测得的距离上的误差也会跟着变大。本系统采用具有小体积、精度高、电路简单等优点的DS18B20温度传感器,与单片机接口电路如图5 所示。
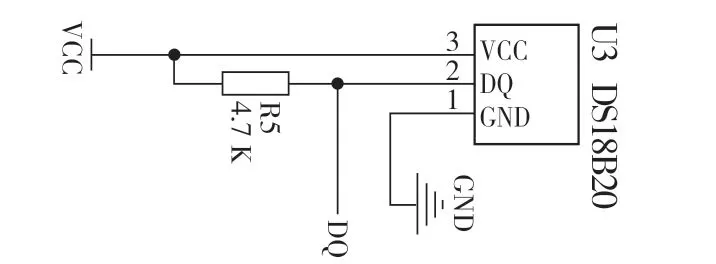
图5 温度测量电路Fig.5 Circuit of temperature measurement
2.5 报警距离调节电路
本系统只设计了3 个按键,分别用来实现“设置”“加”“减”的功能,能够自行根据不同环境和条件对安全距离进行调整,设计语音提示距离。这3 个按键一端与单片机的P3.2,P3.3,P3.4 引脚相连,一端接地。与单片机的连接图如图6 所示。
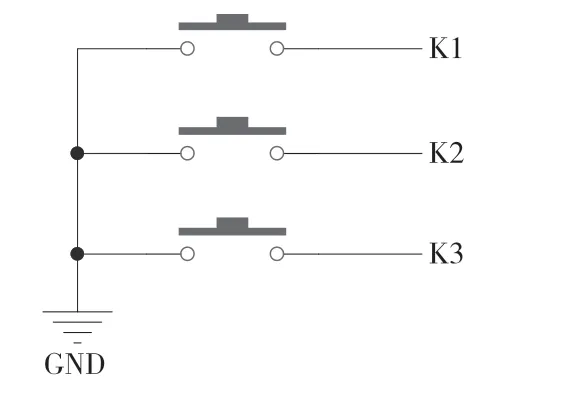
图6 报警距离调节电路Fig.6 Circuit of alarm distance adjustment
2.6 显示电路
显示模块电路是倒车雷达系统中的一个重要输出部分,主要用来显示障碍物与车身间的距离。倒车时配合语音报警模块一起使用,能够给予驾驶员很大的帮助。本设计选用功耗低、质量轻、体积小、对比度和色彩饱和度都非常好的LCD1602 显示屏,与单片机的接口电路如图7所示。
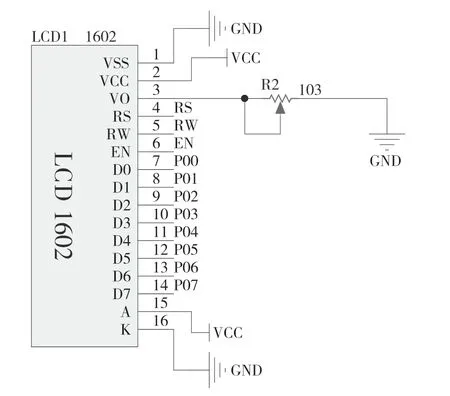
图7 显示电路Fig.7 Display circuit
3 软件设计
采用模块化编程,主程序流程图如图8 所示。包括:初始化程序——主要对液晶显示屏和定时器进行初始化;温度采集程序模块——主要采集环境的温度,使得单片机根据当前温度计算出超声波在空气中的传输速度;超声波测距程序模块——主要测量车身与障碍物间的距离;显示程序模块——主要显示当前环境温度和车身与障碍物间的距离;判断程序模块——判断是否到达语音提示距离及语音警示距离;按键程序模块——主要设置语音警示值。
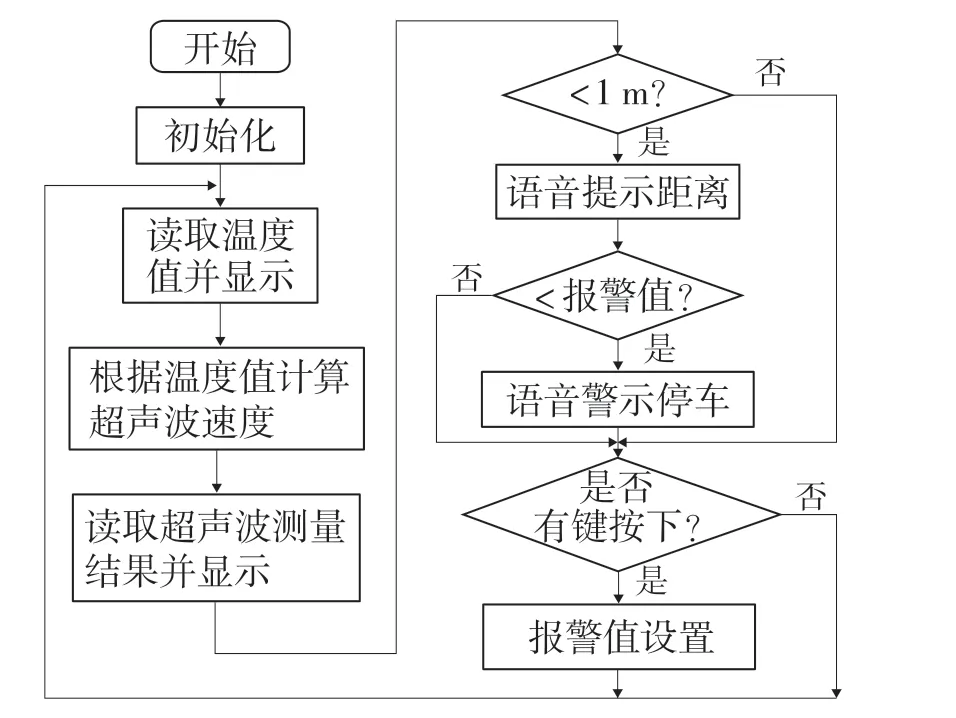
图8 主程序流程图Fig.8 Flow chart of main program
4 系统调试
经过电路焊接,制作出倒车雷达测试系统并进行联机调试,如图9 所示,若按键设定的报警距离是0.4 m,当超声波模块距离障碍物小于0.4 m时,语音会连续提示“停车”,距离障碍物1.6 m 内,每缩小0.2 m 会提示与障碍物间的距离一次。
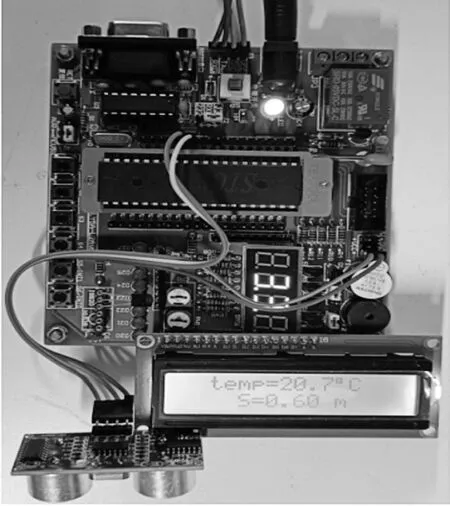
图9 联机调试Fig.9 Online debugging
5 结语
本设计基本完成了倒车雷达所需要的所有功能。设计中还加装了温度监测系统,能够让系统在运行过程中根据所处的环境温度,自动调整超声波在空气中传播的速度参数,提高了整个系统的精确度,减小了在障碍物距离测量上的误差。整个系统功能齐全、电路简单、测量精度高、成本低廉、使用方便,完全满足了驾驶员在倒车过程中所需求的功能。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
活力(2019年22期)2019-03-16
好孩子画报(2019年10期)2019-01-10
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
军事文摘·科学少年(2016年7期)2016-09-20
