
基于位姿约束的工业机器人快速标定系统研究
2021-08-26 11:08:26张新星张元祥
机械设计与制造 2021年8期
张新星,王 辉,张元祥
(1.衢州职业技术学院机电工程学院 浙江 衢州 324000;2.华南理工大学自动化科学与工程学院,广东 广州510640;3.衢州学院机械工程学院,浙江 衢州 324000)
1 引言
工业机器人应用领域越来越广泛,为了满足更多较高精度工作任务的需要,准确地标定出机器人的零位参数就显得尤其重要。机器人定位精度误差问题来自于多个方面,其中主要来源是机器人的制造加工误差和关节零位误差,利用常规的标定误差模型,能够较好地解决误差问题。机器人零位参数作为机器人参数标定中的一种重参数,可以提升机器人的性能参数,满足高精度作业的需求。
国内外对机器人零位标定做了很多研究,文献[1]针对机器人零位进行了深入的研究,跟踪机器人工作空间中的激光线,在跟踪期间记录机器人关节角度,可以估计机器人零点偏移,最后使用估计值来确定机器人零位参数,通过比较测量结果和运动学模型确定了最小二乘意义上的零偏移量[1]。但该算法主要缺点是耗时过长,方法复杂一旦其中一个环节有问题需要重新标定。文献[2]提出了一种标定算法,可以通过补偿运动学模型相关本体参数来增强其零位精度。但是主要标定效果好坏完全依赖于运动学模型,不具备容错性[2]。文献[3]提出了一种在机器人上的传感器(特别是相机)的标记方法,计算机械手速度对相机图像中标记定位误差的方法[3]。文献[4]提出了基于POE的串行机器人运动参数标定方法,该方法标定速度快,但是精度不够[4]。
首先总结了以上方法的优缺点,针对传统6轴工业机器人的零位参数标定方法进行了深入的研究。其次分析机器人零位模型,构建了零位标定模型。再次,依靠快速零位标定设备,摆脱依靠昂贵的激光跟踪仪过程复杂的传统标定方法,为新型零位标定方法提供了新思路。最后,通过对比实验,快速零位标定设备在标定精度上与轴销的标定结果近似,设备造价低廉,可以广泛向机器人企业推广。
2 机械模型结构
2.1 快速零位标定平台
快速零位标定平台可以在原有机器人本体上稍微加工,即可快速的进行安装。如图1所示,为机器人、测量块及快速标定测试台组成示意图。
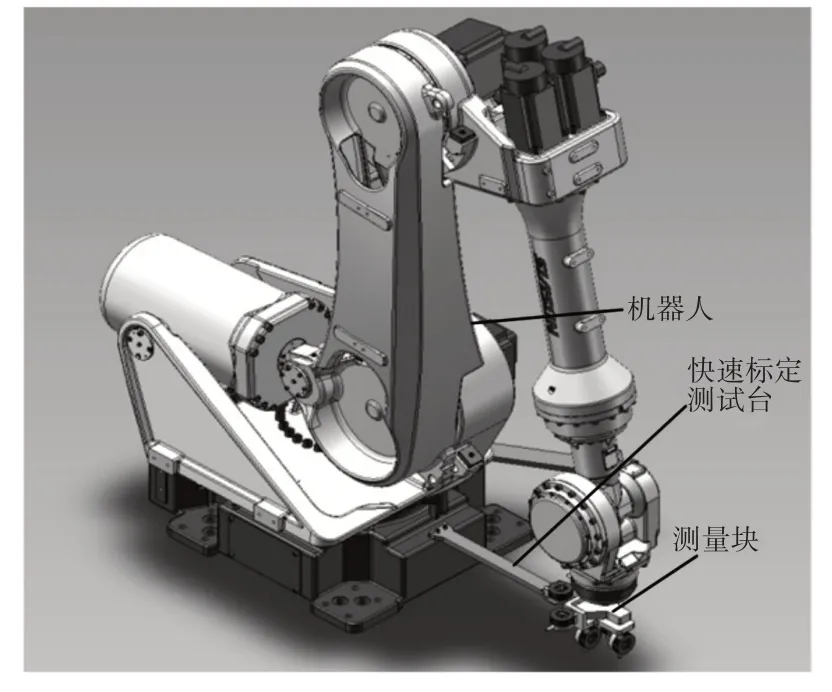
图1 测量块及快速标定测试台组成示意图Fig.1 Schematic Diagram of Robot,Measuring Block and Quick Calibration Test Bench
机器人:为6轴PUMA结构型号机器人,该机器人拥有6个自由度,是现在市场应用最为广泛的一款通用型机器人。因此,本文选择以该机器人为研究对象进行深入的研究。
测量块:测量块安装在机器人6轴法兰上,用于接触快速标定设备中的千分表。接触千分表时,要保证千分表与测量块充分接触,以满足千分表能够计算出测量块的位置数据。
快速标定测试台:快速标定测试台一端安装有6块千分表,用于测量机器人零位的值。另外一端安装在机器人底座,用于固定测试设备的固定。
2.2 测量系统的基本原理
机械手部夹持一测量块,在测量块的坐标系为O T X T Y T Z T。标定块的坐标系为O R X R Y R Z R。矢量R表示机器人末端执行器的位置、O T X T Y T Z T在坐标系O R X R Y R Z R的方向余弦表示机器人手部姿态。
3 快速标定算法
快速标定算法为:在对机器人本体进行快速零位标定时,首先需要一个待标准标定的机器人本体,然后记录下机器人各个关节的角度值。
最后对于待标定机器人持测试块到待测位姿,使用快速零位标定算法,使得标定块在O R X R Y R Z R中的表全部接触,点击标定按钮,完成对机器人本体的标定。
3.1 机器人姿态计算
要想获取机器人本体的零位参数,必须对标定设备进行建模,如图2所示,为标定设备的坐标系。机器人标定块的位姿传递矩阵为

图2 六块千分表的标定模块示意图Fig.2 Schematic Diagram of Calibration Module for Six Dial Gauges
3.1.1 求解标定块

3.1.2 求解测量块

3.2 机器人位置计算
3.2.1 确定平面交点
已知一个平面上的三个点为(R1x,R1y,R1z)、(R2x,R2y,R2z)、(R3x,R3y,R3z),由三点式可以得到平面方程:
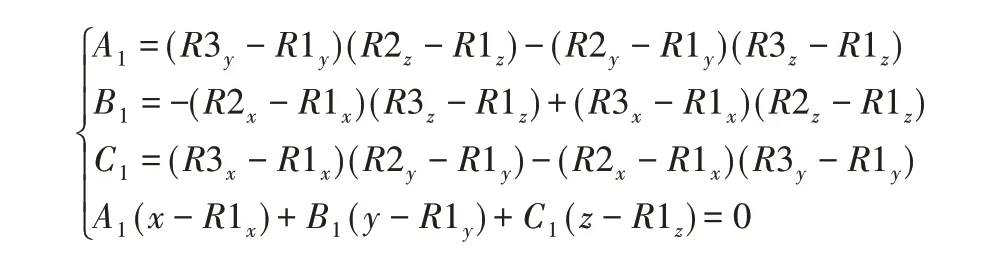
已知标定块的各个方向的单位向量、R(x)n表示千分表的绝对读数,其中n代表第n个孔,由点法式确定三个平面方程。
再求三个相互垂直的平面相交的交点,可以求得交点为:

3.2.2 机器人位置计算
设千分表读数为零时,R(x)n=L为千分表相对R(x)n伸出的长度。已知三个位置点:
式中:j6、l6、j3、k3、k5、l5—机械提供的参数;R(x)6、R(x)3、R(x)5—千分表的读数。由平面三点式方程得到平面方程:

式中:cosα、cosβ、cosγ—平面法矢量的方向余弦,ρ—原点到平面的距离。终上所述已知:

3.3 零位标定归一值

4 零位标定结果及分析
激光跟踪仪虽然精度较高,但是在标定时间和设备成本太高,不具备广泛的推广性,所以本文不以激光跟踪仪的数据作为比较参考。下面文章分别对轴销和快速零位标定设备标定出的零位参数结果进行比较分析,以此来判断该方法是否可以在广泛的向机器人企业进行推广。
4.1 销标定实验
先用轴销对机器人进行标定,采集机器人的码盘值和角度值。与理论的机器人的码盘值和角度值进行比较。
从表1可以看出,机械计算角度数值和机器人实际角度值差距很大。由于其机器人加工技术和装配技术,导致机器人实际的零位值与理论值差异较大,误差较为明显。

表1 理论计算值与轴销标定值对比Tab.1 The Theoretical Calculation Value is Compared with the Calibration Value of the Shaft Pin
4.2 快速标定算法实验
首先,机器人快速零位标定算法采用先调整姿态、再调整位置的计算方案。由于机器人的姿态与标定块的姿态如果不一致,则机器人末端执行器原点相对与标定块的位置是不好确定的,所以要采用调整姿态后,再调整机器人的位置的设计思路来确定机器人整体的变换矩阵。其次针对快速零位标定方法进行分析,再次与轴销零位参数进行对比分析。如表2所示,从表中可以看到两者相差不大,相差最多的关节为第三轴。

表2 比较零位码Tab.2 Compare Zero Code
最后,利用Matlab对标定的结果进行分析,为了验证我们的标定效果,采用均方差和均方根误差来评估机器人的标定度。相关数据排序,如表3所示。
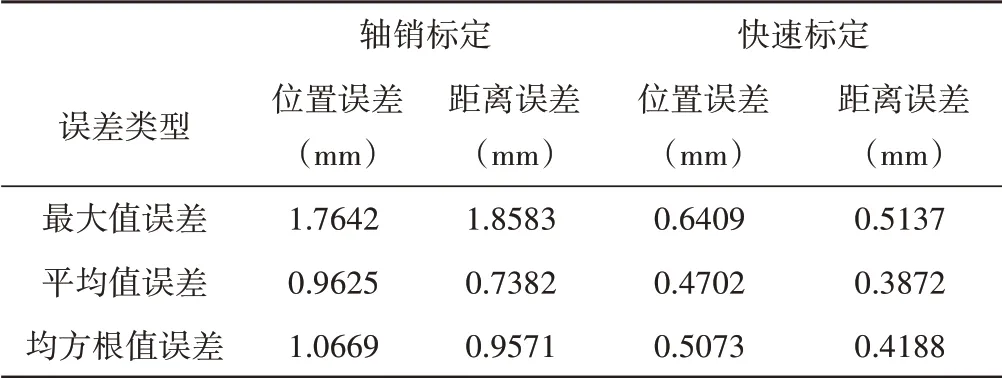
表3 快速零位标定值与轴销标定值对比Tab.3 The Fast Zero Calibration Value Compared with the Calibration Value of the Shaft Pin
4.3 结论分析和讨论
本文提出了一种基于位姿约束的工业机器人快速标定系统,该标定系统的收敛性更强,精度更高。此外,激光跟踪仪1天仅能够对两台机器人零位进行标定,基于位姿约束的工业机器人快速标定算法的效率提高到30分钟一台。精度参数相对于轴销平均误差和均方根误差分别降低到48.85%和47.55%。相对比激光跟踪仪百万级的成本,该设备仅需要万元即可完成部署。技术难点较低,企业可以很快的掌握。当机器人关节增加测量数据需要修改,这是本算法的一个缺点,但是6轴机器人是最广泛的一种构型,所以后期需要加入4轴和7轴即可满足需求。
对基于位姿约束的工业机器人快速标定算法进行以下约束:1)所有关节刚接触千分表时候,各个关节依靠其理论计算;2)千分表只能替代轴销和其他标定粗略的标定设备,不能替代激光跟踪仪这种高精度设备;3)对于n自由度(DOF)通用串行机器人,可识别参数的最大数量是6n+6。
5 结束语
对机器人的零位参数进行准确的标定是机器人定位精度提升的重要方法,如何能够快速、方便、经济获得机器人零位模型是本文的核心思想。现有企业机器人的零位参数主要依靠激光跟踪仪和轴销进行常规的零位标定。鉴于此,本文针对机器人零位参数模型,提出一种基于位姿约束的工业机器人快速标定算法,阐述了计算零位的方法和原理。依靠其相应的零位模型能够较为精确的标定机器人的零位参数,分别对轴销和快速零位标定出的零位结果进行分析与比较。实验结果表明,校正后的绝对精度得到了提高,而且仅仅需要简单的配置即可进行工作。快速零位标定算法不仅以传统工业机器人零位模型为模板,同时具备轴销标定的标定效果,具有更好的误差模型。下一步将研究基于位姿约束的工业机器人快速标定算法是否也可以应用在7轴机器人上进行研究,以满足算法的普遍性。
猜你喜欢
科学与信息化(2022年14期)2022-07-31 10:18:08
科技资讯(2021年20期)2021-10-28 17:27:06
现代机械(2021年3期)2021-07-12 00:47:42
客车技术与研究(2019年5期)2019-10-24 02:22:44
职业·下旬(2016年11期)2017-02-21 21:48:37
光学精密工程(2016年5期)2016-11-07 09:05:55
光学精密工程(2016年4期)2016-11-07 09:05:11
湖北工业大学学报(2016年5期)2016-02-27 13:14:48
电子设计工程(2015年3期)2015-02-27 12:03:53
决策与信息(2014年21期)2014-12-13 01:50:10
