
基于空地一体化在构筑物三维重建中的应用
2021-08-23 01:42郑远杨
淮阴工学院学报 2021年3期
郑远杨,刘 超,丁 涛,邓 烨
(安徽理工大学 空间信息与测绘工程学院/矿山采动灾害空天地协同监测与预警安徽省教育厅重点实验室,安徽 淮南 232001)
目前,人工建模、激光雷达建模和倾斜摄影建模是主流的三维建模技术。人工建模通常采用大比例尺规划图结合3DMAX软件进行建模,并结合现状照片进行纹理贴图,但该建模方法对于复杂构筑物来说存在一定的困难,制作周期较长,人工干预较多,简言之费时费力,建模效果失真[1]。激光雷达获取的点云数据量广,点云特性稳定,且对于点云处理方面已取得巨大进步,现在已广泛推进三维重建利用激光雷达数据。张冬等[2]利用地面激光雷达对单株树木进行建模,通过不同算法提取枝干骨架和树枝;贾雪等[3]利用海量点云数据,基于镶嵌法进行三维重建,但该方法前期准备工作时间较长,后期纹理贴图困难。倾斜摄影测量技术可以获取构筑物顶部、侧面信息,目前对于较大区域采用航摄影像三维建模,无人机成本较低,快捷灵活,可获取大量目标物数据。刘洋等[4]利用无人机影像数据进行古建筑三维重建,通过规划航线和贴近摄影测量结合方法,但该方法对手动拍摄影像重叠度要求较高。
当前研究多数在单体化建模,单一建模虽然简便快捷,建模效果快,但有所欠缺,存在人工修模、模型纹理模糊,目标物存在空洞等问题。
无人机倾斜摄影测量从1个垂直角度和4个倾斜角度获取地面物体的表面信息,从而得到目标物的空间三维坐标[5]。通过软件处理获取的影像,可快速实现地面建筑物的三维重建,然而受飞行高度和摄影角度限制,建立的模型在近地面会存在变形和拉花等问题,不能很好地满足如今的建筑物精细化建模要求;近地面摄影测量技术通过非量测相机在地面拍摄照片,可解决无人机航拍无法拍摄的角度问题,根据二者各自的互补,可以大大提高城市实景三维建模质量。因此本文拟采用航空摄影测量结合地面照片方法进行三维重建,经实验该方法实际应用效果较好。
1 基于摄影测量的三维重建方法概述
基于摄影测量的三维重建是根据双目视觉原理,以摄像机为媒介获取目标物的二维影像,借助目前影像处理软件提取相邻图像中的同名点,再以同名点为匹配基元建立各图像之间的对应关系。经处理软件获取精确的匹配关系后,再结合摄像机规定的内外参数就可以得到空间点的三维坐标导出的点云数据,由点云数据构建不规则三角网格模型,最后再根据纹理映射算法得到具有真实纹理信息的三维模型[6]。
三维建模的实质为点云数据构建TIN三角网,并结合纹理算法附纹理信息至TIN三角网。倾斜摄影测量与地面拍照技术二者的本质是融合生成点云数据,最后构建高精度三维模型。技术路线如图1所示。
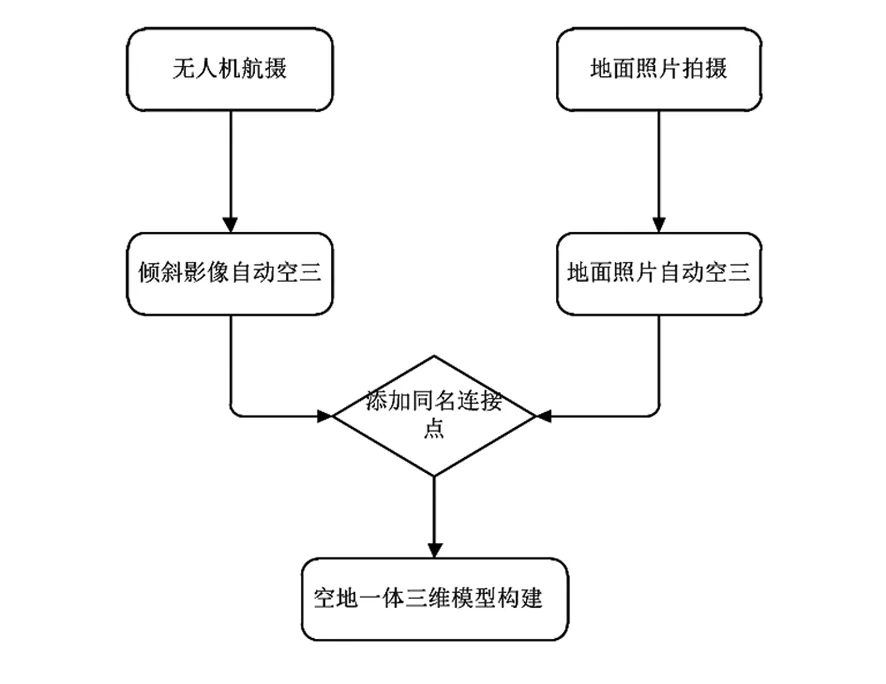
图1 融合建模技术路线
获取的无人机影像(地面照片)数据进行空中三角测量前要进行检核,查看影像是否全部可用于三维重建,空中三角测量结束后,可查看空三质量报告,其中包含关键点、连接点以及重投影误差,一般主要查看重投影误差是否在规定范围内即小于1个像素。区块合并后进行三维重建,将融合模型与扫描仪点云构建的模型进行3D比较,从而确定整体建模精度。
2 数据采集
2.1 无人机影像数据采集
当前无人机行业快速发展,凭借其体积小、低成本、获取数据量广的优势在测绘领域被广泛应用[7-8]。利用无人机搭载的单镜头或多镜头,获取测区各方位带有POS信息的影像数据,根据获取的影像数据可建立接近于实景的三维模型[9]。
本实验采用大疆精灵4Pro无人机,正常GPS定位工作时,垂直悬停精度为±5 m,水平悬停精度为±1.5 m。无人机航摄飞行前,利用奥维地图进行目标区裁取,并根据实验要求用飞行控制器规划航线;为建立高质量的三维模型,确保相邻影像之间的重叠度,航向重叠度一般要求在60%~65%,最低不得小于53%,旁向重叠度一般要求为30%~40%,最小不得小于15%,若航向、旁向重叠度小于最低要求称为航摄漏洞,需航摄外业补救[10]。本次航向重叠度和旁向重叠度设为90%,飞行高度为20 m,共采集136影像,均可进行三维重建。
2.2 地面照片采集
地面拍照对象为拱形建筑物的底部和文字碑,底部数据由于无人机规划的航线难以获取,若采用低空环绕飞行,由于自身的避障系统,使得环绕拍摄也无法获取完整的底部数据;文字碑具有特殊意义,航摄高度为20 m,使得字体难以看清,因此采用地面拍照,本次地面拍照采用Iphone11手机,广角拍摄和六镜式镜头广角拍摄,且广角镜头具备光学图像防抖功能,符合本次实验拍摄相机要求。如图2所示。

图2 地面照片拍照示意图
由于手机和无人机属于二种不同的设备,内部参数设置不同,为确保整体建模质量,无人机航摄和地面拍照应同一时段分别进行,且手机取景采用环绕式拍照,尽量每隔15°拍摄一次,确保照片重叠度[11],采集底部照片33张,文字碑照片14张,共采集47张照片,均可进行三维重建。
3 影像数据与地面照片融合三维重建
实现航摄影像与地面照片融合建模的关键是将两组照片进行联合空中三角测量。联合航摄影像与地面照片可利用过渡影像来实现,即采用少量重叠度极高的影像来连接两组照片,但此方法需要利用无人机下降不同高度采集影像来连接,若高度下降不均匀、照片采集角度偏差较大都会影响融合效果,因此本次采用连接点方法进行照片联合,无需下降无人机高度采集连接照片,本文详细建模方法如图3所示。
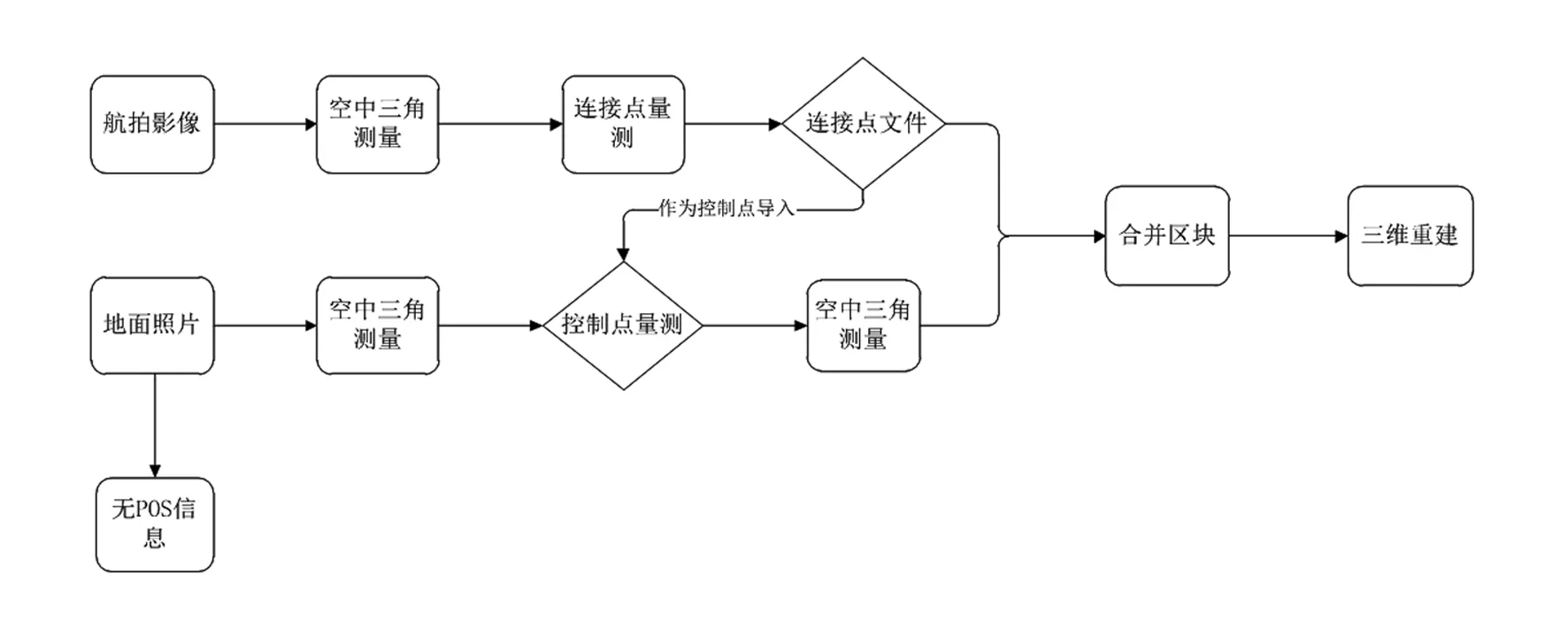
图3 影像数据与地面照片融合建模流程图
3.1 区域网倾斜空三加密
本实验采用单镜头无人机获取影像数据,使用Context Capture快速实现实景三维建模,该软件的优势为全自动化处理影像数据。首先在该软件创建一个区块block1,将影像数据导入直接进行多视影像联合平差倾斜空三加密,最终获得带有真实三维坐标的空三结果。单一无人机共生成42 522个连接点,平均每张影像提取25 272个关键点,重投影误差为0.48个像素。
3.2 区域网地面照片空三加密
采用Iphone11手机获取的地面照片无POS信息。在Context Capture中创建block2区块,手机拍摄的照片中会含有无效影像,因此进行空三解算前需进行照片检查,随后进行地面照片空三加密解算,获得一组无任何真实三维信息的空三结果。地面照片底部连接点共生成12 260个连接点,重投影误差为0.7个像素,文字碑生成2986个连接点,重投影误差为0.74个像素。
3.3 添加连接点
采用连接点进行照片联合,需保证每个连接点至少在3~5张影像上。该方法具体为:利用无人机影像进行空中三角测量,随后利用空三结果选择连接点,确保选择的连接点影像与地面照片相对应,连接点选择至少3个,每个连接点在3张以上影像中,选择结束后,导出连接点文件为.txt格式;将选择好的连接点文件导入地面照片中选择对应点,此时导入的连接点作为控制点;最后将两组空三结果合并区块进行三维重建,连接点融合结果如图4所示。

图4 融合空中三角测量结果
本文控制点点数为3个,其三维误差的RMS为0.016 m、三维水平误差的RMS为0.016 m、三维垂直误差的RMS为0.002 m。
3.4 空地融合自动三维实景建模
实验获取大量的影像数据,生成密集点云较多,利用Context Capture建模时,由于计算机内存为16RAM,经分析计算所需内存大小将分块建模,共生成16个瓦块进行TIN模型的构建,最后根据构建好的TIN模型进行纹理映射,得到真实三维模型,如图5所示。
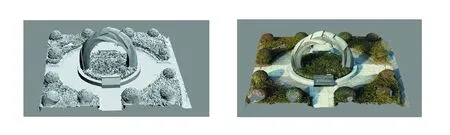
(a)融合构筑物白膜; (b)融合构筑物模型
将未添加地面照片模型与添加地面照片所建三维模型进行对比,可以清晰看出因航摄带来建模空洞的修补以及文字碑字体更加清晰,如图6所示。

(a)无添加地面照片

(b)添加地面照片
4 精度分析
融合照片数据精度决定了本次三维重建模型的质量。扫描仪获取的点云稳定且质量良好,因此本文以站地式三维激光扫描仪获取的点云构建模型为参考,以融合照片模型为测试对象,将二者构建的模型进行整体3D比较,从而判定融合模型的精度。3D比较原理为,利用3D比较分析,会在测试对象和参考对象之间生成色谱图,可以比较直观地看出二者点云数据在X、Y、Z方向上的偏差值,其模型比较步骤如图7所示。
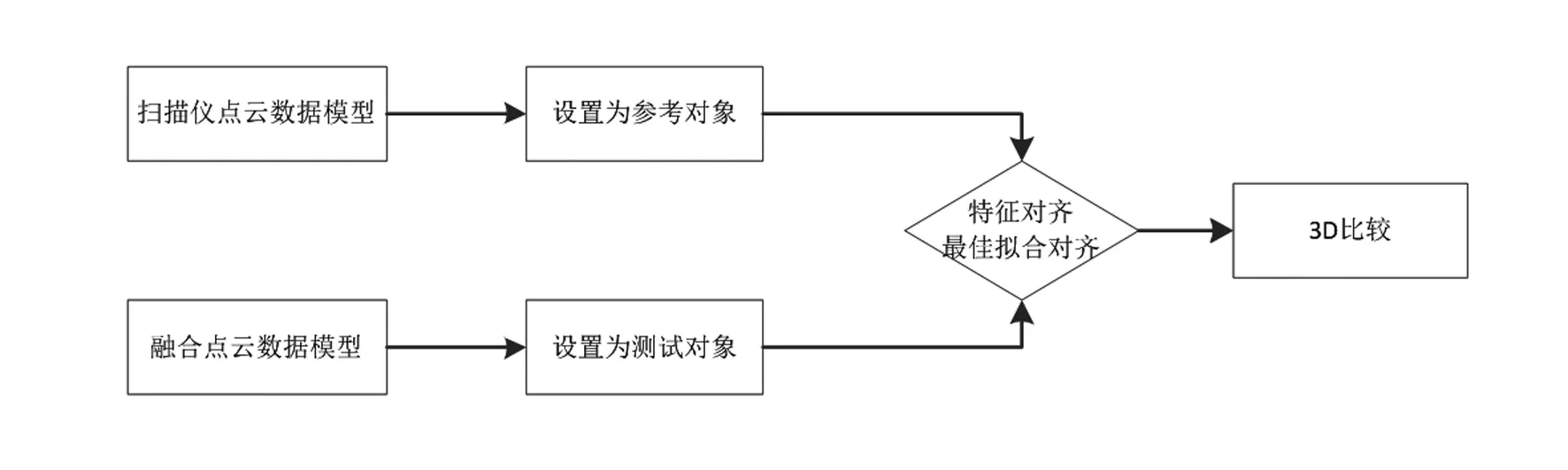
图7 模型3D比较精度分析步骤图
融合数据和扫描仪数据分别在不同坐标系下,直接进行3D比较则无法进行,因此在进行比较前,需对模型进行特征对齐,使得在同一坐标系下,经特征对齐的模型再次使用“最佳拟合对齐”,对齐结果显示,均方根误差RMS为0.043 83 mm,平均误差为0.031 54 mm。
将构建的模型进行3D比较分析后,得出不同位置点云的偏差分布。比较结果显示,最大或最小临界值均为±0.5193 mm,最大或最小名义值为±0.0260 mm,最大上偏差为+0.5193 mm,最大下偏差为-0.5018 mm,标准偏差为+0.0473 mm,偏差分布如表1所示。

表1 3D偏差分布
由表1可知,有54.7161%的点分布在-0.0260~0.0260 mm,其中偏差超过±0.1082 mm的点云所占百分比总和仅为2.98%,从总体分布来看,3D比较偏差结果符合误差要求,融合建模质量效果良好。
5 结语
运用航摄影像结合地面照片融合构建纪念标志物具有重大意义,实验结果表明该方法建模效果显著,成功实现三维真实地物可视化。
数据采集方面利用航空摄影和地面拍照技术结合,弥补了二者之间的缺陷,使得获取的目标物信息更加完整;利用照片之间的连接点融合,使得缺失影像更加完整,减少外业获取过渡影像带来的麻烦。空地一体结合技术为特殊纪念物留存提供一种新的思路,具有良好的推广价值,同时在文物保护方面具有重要意义。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
中华养生保健(2020年7期)2020-11-16
河南城建学院学报(2020年3期)2020-08-14
软件(2020年3期)2020-04-20
初中生世界·九年级(2020年2期)2020-04-10
电子制作(2018年17期)2018-09-28
新课程·小学(2017年8期)2017-09-20
IT经理世界(2017年4期)2017-03-25
汽车文摘(2016年6期)2016-12-07
