双闭环BOOST变换器系统模糊PID控制
2021-08-19 04:10邓孝祥张伟杰
黑龙江电力 2021年3期
邓孝祥,刘 钰,张伟杰
(黑龙江科技大学 电气与控制工程学院,哈尔滨 150022)
0 引 言
闭环控制系统的加入是为了提高电路的输出精度和动态性能。采用不同的控制方法得出的控制性能会有所差别,所以控制方法的选取和使用对开关电源的性能影响很大。文献[1]采用传统PID控制策略,不能实时调节PID参数,系统鲁棒性不强。目前对开关电源的控制方法主要有两种,即电压型控制和电流型控制,文中在考虑两种控制方法各自优缺点的基础上,把采样的电感电流作为反馈量,构建一种内环输入电流外环输出电压的双闭环控制方法,以TMS320F28335作为控制核心,搭建一套利用模糊PID控制的电流电压双闭环BOOST变换器的硬件电路,验证所提出控制策略的可行性和有效性。
1 模糊PID控制策略
在现代化生产生活中,人们对控制器进行优化时会利用以往工作中积累的丰富经验和深厚的理论知识,人为手动调节控制参数。把实践和工作中积累的丰富经验融合到控制器中是模糊控制的本质。模糊PID控制器通过实时自动调整和修正比例、积分和微分三个参数对系统进行实时调节,它既具有模糊控制的快速调节、适应性强的优点,又具有传统PID控制精度高的优点。因此,通过模糊PID控制对系统PID参数进行在线调节修正,使闭环调节系统能够快速、稳定地调节,提高系统鲁棒性[2]。
2 BOOST变换器参数设计
2.1 滤波电感参数设定
BOOST变换器作为常用的DC/DC变换器之一,其拓扑如图1所示。

图1 BOOST变化器拓扑图
其中:Ui为BOOST变换器的输入电压;Uo为BOOST变换器的输出电压;Q为半导体场效应晶体管MOSFET;二极管D防止能量回灌;L为储能电感;C为输出滤波电容;R为等效负载;iL为电感电流。
文中拟设计一种工作在连续模式下的BOOST变换器,其技术指标见表1。

表1 BOOST变换器技术指标
BOOST变换器电路工作于CCM模式由伏秒积平衡可得到电感量Lmin,如式1所示。
(1)
式中:v0为输出电压,D为占空比,I0为输出电流,f为开关频率,L为电感量。
2.2 输出电容参数设定
将各参数带入式(1)进行计算,得Lmin=41.67 μH,为了保证电感电流连续,电感值L应该保证L≥1.3Lmin,同时满足电流纹波要求,故L取1.2 mH。由于输出滤波电容以及滤波电容中的等效内阻ESR的存在,输出电压将存在脉动分量,忽略输出电容中等效电感分量,结合最大输出纹波和最大电压下垂量、超调量,通过式(2)可算出滤波电容的最小值Cmin。
同时,回归的F值为35.22,P值为0.0007,远小于1%。由此可见,多元线性回归通过F检验,即营销费用和研发费用对主营业务利润的影响显著。
(2)
式中:Dmax为最大占空比;C为电容值;ΔU电压波动值;f为开关频率。
将各参数带入式(2)进行计算,得Cmin=579 μF。但在实际工程领域,输出电容需要考虑裕量,故选取滤波电容为630 μF。
3 模糊PID控制器设计
由图2可知,模糊PID控制器主要由模糊控制器与PID控制器两部分组合而成,通过将被控对象输出与给定之间的误差e及误差变化率ec作为模糊控制器的输入,通过设定的模糊规则,基于输入量,进行模糊推理,得出PID控制器的参数Kp、Ki和Kd整定量[3],从而对Kp、Ki和Kd进行修正,使被控对象保持在良好的动、静态稳定状态运行[4]。

图2 模糊PID控制系统方框图
模糊控制器主要由模糊化,模糊推理,去模糊化三个模块组成[5]。如图3所示。其中e*为误差模糊集;ec*为误差变化率模糊集;ΔKp、ΔKi、和ΔKd为控制器输出的整定量。

图3 模糊控制器原理图
3.1 论域及隶属度函数
因为输出电压为120 V,可设定误差e的论域为[-120,120]。误差变化率ec的论域设定为[-5000,5000]。模糊子集设定为{NB,NS,Z,PS,PB}分别代表{负大,负小,零,正小,正大}[6]。对于e与ec,设定fgaussm函数和ftrim函数相结合的隶属度函数[7]。当误差e或误差变化率ec过大时,采用fgaussm函数,误差e或误差变化率ec较小时用ftrim函数。
3.2 制定规则库
模糊PID控制的实质就是使系数Kp、Ki和Kd随着误差e和误差变化率ec的变化而自行变化。为了实现这一目的,对于采集并计算出的e与ec,为了能得出它们各所占的隶属度,通过建立模糊规则表,并根据模糊规则表找出输出值所对应的隶属度,从而能得出Kp、Ki和Kd的整定数值[8]。
当e的值较大时,为了尽快消除偏差,加快系统的过渡过程,提高响应速度,减小超调量;当e的值较小时,为了防止系统超调,则以提高系统稳定性为主。根据控制经验和实验结果,结合相关文献,制定出ΔKp、ΔKi和ΔKd的模糊规则表,分别如下表2、表3、表4所示。

表2 ΔKp的模糊控制规则表

表3 ΔKi的模糊控制规则表
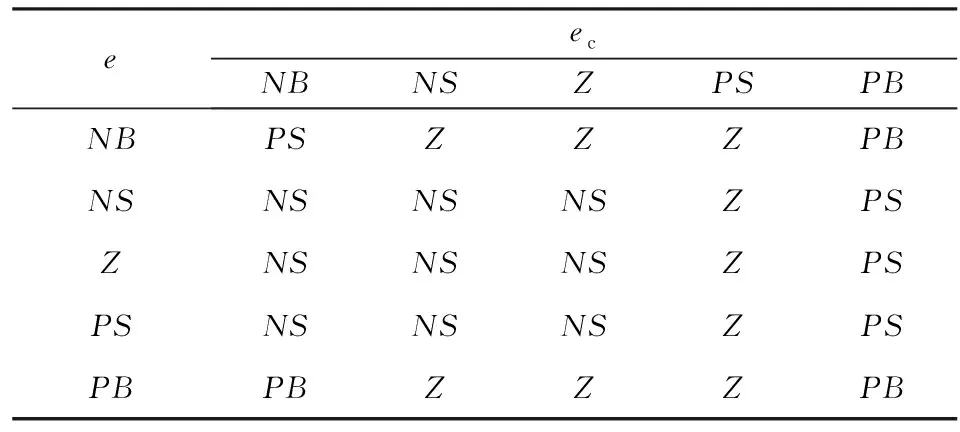
表4 ΔKd的模糊控制规则表
该文模糊推理的执行采用马丹尼型算法,去模糊采用重心(面积中心法)得到精确值。由模糊控制器输出的整定数值ΔKp、ΔKi和ΔKd通过根据输出量实时更新Kp、Ki和Kd的参数值。

4 实验设计
4.1 硬件系统平台
BOOST变换器控制系统图如图4所示。采用TMS320F28335作为主控制芯片,其中包括BOOST主电路,辅助电源电路,驱动电路,采样电路。DSP控制芯片主要使用了ADC模块对电压电流信号高频采样,PWM模块进行开关频率设置及对开关管占空比的修正。

图4 BOOST变换器控制系统图
4.2 实验结果
4.2.1 阶跃启动
空载情况下,在输入电压60 V时,传统PID控制器和模糊PID控制的阶跃启动波形如图5、图6所示。测得两种控制方式下空载阶跃启动时的数据如下表5所示。阶跃启动时,由于模糊PID控制可在线实时整定PID参数,从而明显可从图中看出模糊PID控制器减小了超调量和恢复时间,系统鲁棒性较强,可知模糊PID算法在阶跃启动情况下对系统性能有改善。
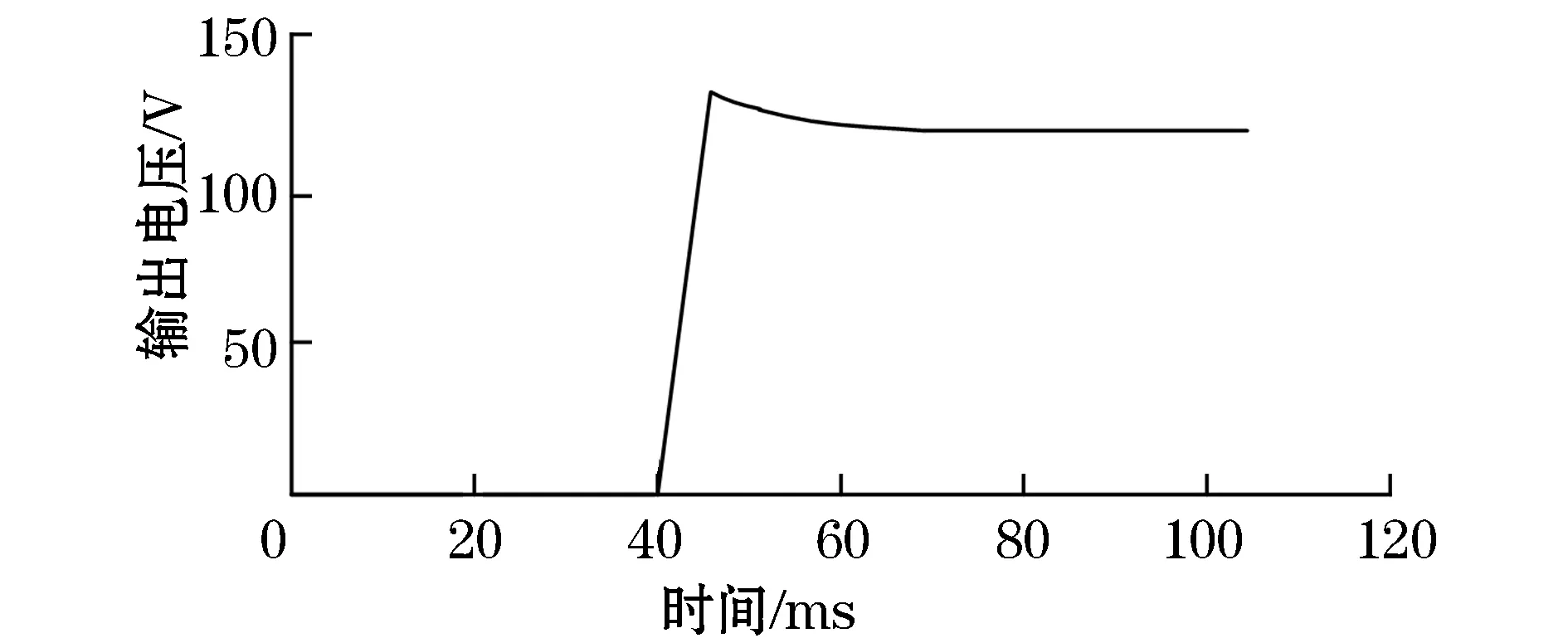
图5 传统PID控制器输出电压波形

图6 模糊PID控制器输出电压波形

表5 空载阶跃启动时两种控制方式实测数据表
4.2.2 动态性能
带载情况下,突加负载,当负载从60 Ω到30 Ω调整时,传统PID控制器与模糊控制器波形如图7、图8所示。测得两种控制方式下突加负载时的数据如表6所示。当负载扰动引起工作点变化并导致系统模型及其频率特性改变时,传统PID控制器由于固定的参数无法对扰动做出相应调整,导致输出电压波动较大,恢复时间较长,系统动态性能较差。而采用模糊PID控制器时输出电压波动较小,恢复时间也更短,因此采用模糊PID控制系统的动态性能更好。

图7 传统PID控制器加载输出电压波形

图8 模糊PID控制器加载输出电压波形
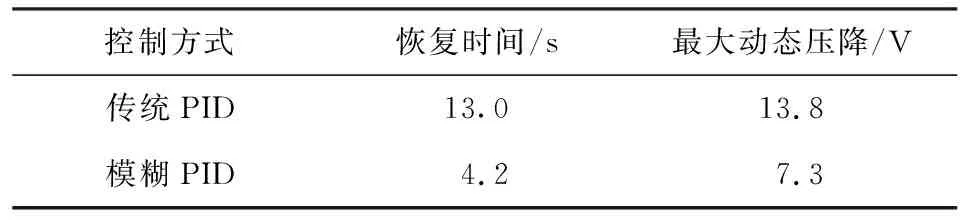
表6 突加负载时两种控制方式实测数据
4.2.3 输入电压扰动实验
在稳态条件下将输入电压从60 V突增到80 V,传统PID控制器与模糊PID控制器的输出电压波形如图9、图10所示。测得两种控制方式下输入电压突增时的数据如下表7所示。传统PID控制器由于PID参数固定,系统动态稳定性较差在输入电压突增的情况下输出电压波动较大,响应速度较慢,恢复到额定输出电压的时间也较长。模糊PID控制由于可自整定参数,控制精度较高,输出电压的波动,恢复时间和动态压降等都有明显减小,系统的动态性能较高。

图9 传统PID控制器输出电压波形

图10 模糊PID控制器输出电压波形

表7 输入电压突增时两种控制方式实测数据
5 结 论
该文提出的BOOST变换器双闭环模糊PID控制器具有自适应能力,有效克服了传统PID控制器动态性能差、不能实时在线调整和修正控制参数和人工整定经验不足等弊端。通过两种控制方式下的实验结果对比,表明当BOOST变换器控制系统的相关参数和负载出现扰动时,文中采用模糊PID控制的系统输出电压相较于传统PID的动态稳定性更好,有效克服了传统PID控制动态压降大和恢复时间长的缺点,具有适应性强、动态响应快和调节效果好的优点。
猜你喜欢
内蒙古电力技术(2022年1期)2022-03-18
电源学报(2022年1期)2022-02-25
化工自动化及仪表(2021年6期)2021-11-26
通信电源技术(2021年9期)2021-09-23
防爆电机(2021年3期)2021-07-21
电源学报(2020年3期)2020-06-28
沈阳工业大学学报(2020年3期)2020-06-03
电子技术与软件工程(2020年17期)2020-02-02
电子制作(2018年19期)2018-11-14
电子制作(2018年19期)2018-11-14