
大蒜多行联合收获机秧果集送装置设计与试验*
2021-08-13 09:47:22杨红光胡志超彭宝良王冰张延化于昭洋
中国农机化学报 2021年7期
杨红光,胡志超,彭宝良,王冰,张延化,于昭洋
(1. 农业农村部南京农业机械化研究所,南京市,210014; 2. 农业农村部现代农业装备重点实验室,南京市,210014)
0 引言
大蒜机械化联合收获可以一次性完成大蒜植株的挖掘起拔、去土输送、切茎和蒜头收集等工序,是实现大蒜高质、高效生产的基础,也是一个国家大蒜机械化生产水平的重要体现。我国大蒜种植面积大、范围广,大蒜主产区实现机械化联合收获是必然选择。
在大蒜机械化收获方面,美国、法国、西班牙、日本等研究早,技术装备较为成熟[1-2]。但受大蒜品种和种植模式限制,国外相关技术装备并不适用于当前我国大蒜收获作业。而我国对大蒜机械化收获技术装备的研究相对较晚,理论基础和关键技术积累较为薄弱,而且早期的研究多集中在与手扶拖拉机和小四轮拖拉机配套使用的中小型大蒜挖掘机上[3-5]。彭宝良等[6]在前期相关研究基础之上,率先研发出4DLB-2型半喂入自走式大蒜联合收获机,并开展了较多试验研究工作[7-9]。随后国内多家科研单位对大蒜联合收获技术装备开展研究。韩可[10]研发出一款4DS-6型大蒜联合收获机;宁金伟等[11]研发出一款单行打捆式大蒜联合收获机;马凯等[12]研发出一款全自动6行大蒜联合收获机;赵东等[13]研发出一款4行模块化大蒜联合收获机;崔军等[14-16]分别研发出2行和6行大蒜联合收获机。
经过学者们近年来的持续技术攻关,我国大蒜联合收获技术装备不断丰富,性能也进一步得到优化提升。但是,当前1行或2行联合收获作业的大蒜收获机械由于作业效率较低,已不能满足我国大蒜机械化收获需求;同时,大蒜打捆联合收获作业模式也不适宜当前我国大蒜生产需求。随着我国人工老龄化问题的加剧,广大蒜农迫切需要性能可靠的大蒜多行(≥3行)联合收获机,来实现大蒜高效率、低人工劳动强度的收获作业。大蒜多行联合收获成为大蒜机械化收获的重要发展方向,大蒜多行联合收获技术装备研发成为大蒜产业亟需解决的问题。秧果的归集输送是大蒜多行联合收获作业的关键环节,既要保证整机结构简便,又要实现多行秧果的统一分别归集输送。而现有的大蒜多行联合收获机的秧果归集输送作业多采用两套装置完成,这种结构设计及布置方式,极易造成整机结构复杂和动力浪费。因此,结合我国收获期大蒜植株特性和多行大蒜同时收获作业的实际需求,研发简单实用的秧果归集输送装置,为大蒜多行联合收获机的设计提供关键装置支撑,对推动我国大蒜多行联合收获机械的研发应用具有重要意义。
1 秧果集送装置结构与工作原理
1.1 整体结构
依据收获期大蒜植株特性和多行大蒜同时收获作业需求,设计的秧果集送装置整体结构如图1所示,主要由驱动部件、杆式输送链、输送链支撑架、防护侧板、出料口等组成。其中,驱动部件由链轮、传动轴和带座轴承等组成,通过两侧轴承座与输送链支撑架相连接,经链轮带动杆式输送链运动;杆式输送链整体结构呈拐角形,包含水平段和竖直段,主要由两条平行的回环链组成,两条回环链之间安装有间隔分布的杆条,杆条上安装有向内和向外的蒜头归集板和蒜秧归集板,在杆式输送链运动过程中分别实现蒜头和蒜秧的归集作业。输送链支撑架包括主支撑架和张紧支撑架两部分,主支撑架作用是支撑杆式输送链形成拐角形结构,张紧支撑架作用是调整杆式输送链的张紧程度,满足蒜秧和蒜头的归集输送作业要求。

图1 整体结构Fig. 1 Overall structure1.输送链支撑架 2.出料口 3.驱动部件 4.杆式输送链 5.防护侧板
1.2 工作原理
多行大蒜联合收获时,每行大蒜植株依次历经挖掘起拔、夹持输送、去土切茎等作业工序。一方面,被切下的蒜头向下掉落,经过橡胶导蒜滑板进入秧果集送装置的杆式输送链水平段内侧回环中,在蒜头归集板的拨挡作用下,随输送链逐步由水平段运动至竖直段,最后经出料口进入后续作业环节;另一方面,被切下的蒜秧在割台夹持输送链末端的导秧机构的引导作用下,倾斜向下落入秧果集送装置的杆式输送链水平段外侧回环上,在蒜秧归集板的拨挡作用下,随输送链运动,最后被成条铺放在机器前进方向右侧的田块中。
2 秧果集送装置设计分析
2.1 设计依据与原理
蒜秧和蒜头的归集输送是多行大蒜联合收获作业过程中的关键环节。目前,我国已有的大蒜多行联合收获机蒜秧和蒜头的归集输送多采用两套装置完成,这种结构设计及布置方式,极易造成整机结构复杂和动力浪费。因此,本设计的秧果集送装置的依据及原理如下。
1) 结构简便、性能可靠,同时消耗功率小。
2) 在确保结构简便的前提下,尽量通过一套装置完成蒜秧和蒜头的归集输送作业。
3) 在确保通过一套装置实现蒜秧和蒜头分别归集输送作业的前提下,充分考虑装置整体尺寸大小及结构型式,以便于与联合收获机其他作业机构进行衔接和匹配安装。同时,蒜头的归集输送作业时应确保不伤蒜和漏蒜。
2.2 整体结构尺寸与安装位置分析
秧果集送装置主要作用是完成蒜秧和蒜头的分别归集输送,是大蒜联合收获机(特别是大蒜多行联合收获机)的关键作业机构。按照简单实用的原则进行设计,将蒜秧和蒜头归集两道工序通过一套装置完成。为实现蒜秧和蒜头的分别归集输送作业,将秧果集送装置设计成拐角形结构。结合整机结构尺寸(履带式行走底盘尺寸)、功能需求(作业行数)及与其他部件相对安装位置关系等,如图2所示,设计秧果集送装置杆式输送链水平段的主体长度L1为1 500 mm、宽度C为220 mm、高度H1为260 mm,竖直段的主体长度L2为800 mm、宽度和水平段相同、高度H2为300 mm。
图2 输送链结构尺寸Fig. 2 Structure size of conveying chain
在与联合收获机其他作业机构衔接方面,设计的秧果集送装置整体位于多行大蒜联合收获机割台尾部,水平段满幅宽分布于多行大蒜割台夹持输送链末端下侧、竖直段分布于多行大蒜割台夹持输送链末端外侧。秧果集送装置及相关部分具体安装位置如图3所示,杆式输送链水平段位于割台夹持输送链末端和导秧链下部,秧茎切割部件位于秧果集送装置前侧中下位置。通过割台夹持输送链末端的导秧机构来调整蒜秧姿态,保证蒜秧倾斜或水平落入杆式输送链水平段外侧回环上,通过橡胶导蒜滑板保证将切下的蒜头顺利送入杆式输送链水平段内侧回环中。

图3 安装位置Fig. 3 Installation position1.导秧机构 2.夹持输送链 3.蒜秧归集板 4.蒜头归集板5.秧果集送装置 6.秧茎切割部件
2.3 杆式输送链主要参数设计分析
杆式输送链是秧果集送装置的核心部件,其结构参数对作业性能起决定性作用。其中,杆式输送链的杆条间距、蒜秧和蒜头归集板的分布间距是主要结构参数。杆式输送链的杆条除了具有输送作用外,在运动的过程中也具有一定的去土效果,间距过大会造成蒜头漏出,间距过小会影响去土性能。依据前面对大蒜鳞茎尺寸的测定,选取输送链的杆条直径为6 mm、间距为38 mm,既保证不漏蒜,又具有较好的去土效果。同时,考虑到刚被起挖的大蒜鳞茎较为鲜嫩,怕碰伤,因此在杆条上套装橡胶软管,减少鳞茎损伤。
蒜秧和蒜头归集板在杆式输送链上的分布间距同样影响作业效果。结合前面测定的蒜秧和蒜头尺寸,以及台架预试验研究,如图4所示。
图4 归集板尺寸Fig. 4 Collecting plate dimension
设计的蒜秧和蒜头归集板通过螺栓连接进行集成安装,选定其分布间距E为200 mm。其中,蒜秧归集板呈槽钢型,高度h1为10 mm;蒜头归集板呈两边开口状,高度h2为70 mm,两侧倾角α均为135°,低端有效归集深度h3为10 mm、高端有效归集深度h4为25 mm。
3 秧果集送装置性能试验
3.1 试验条件
试验于2020年5月在江苏省射阳县合德镇友爱村大蒜种植基地进行,试验地为砂壤土,面积>1.5 hm2。大蒜品种为射阳白蒜,直立性较好,无地膜覆盖,种植株距100 mm、行距200 mm。在田地中,随机选取50株大蒜植株对如图5所示的蒜秧有效夹持高度L、假茎直径d、鳞茎直径D、鳞茎高度H进行测定。结果表明,蒜秧有效夹持高度45.6~58.4 mm、假茎直径13.1~18.3 mm、鳞茎直径43.8~65.2 mm、鳞茎高度34.5~45.9 mm。
图5 大蒜植株参数Fig. 5 Garlic plant parameters
3.2 试验方案与结果分析
将研发试制的秧果集送装置安装于自制的多行大蒜联合收获样机上,以联合收获机为试验台架,选取4行收获作业模式,以蒜秧和蒜头收集率为指标验证秧果集送装置的性能。试验时通过人工方式喂料,结合前期相关研究[17-18]和多行大蒜联合收获预试验研究,割台夹持输送链运动速度取0.7 m/s、秧茎切割部件刀片刃口线速度取2.0 m/s、秧果集送装置输送链线速度取0.87 m/s,蒜秧喂入夹持高度取200~280 mm。为保证物料特性和田间一致,试验采取人工现场拔秧的方式,试验用大蒜植株物料从被拔起至进行试验的时间间隔控制在30 min内。试验时由4名试验员同时将大蒜植株逐个连续喂入联合收获机割台夹持输送链中,进行后续作业。试验共3组,每组喂入大蒜200株(每位试验员喂入50株),试验结束后统计每组未完成归集输送的蒜秧和蒜头数量,计算蒜秧和蒜头收集率,取3组试验的平均值作为最后试验结果。结果如表1所示,蒜秧平均有效收集率98.17%、蒜头有效收集率100%。
表1 台架试验结果Tab. 1 Bench test results
如图6所示,为了更好地检验设计的秧果集送装置的性能,结合田间种植大蒜植株参数的测定和台架试验研究,选取4行大蒜进行田间收获性能试验,机器前进速度取0.6 m/s、挖掘机构作业深度取100 mm、其他参数与台架试验相同,每个试验测区收获作业长度为3 m,人工预先将测区内蒜秧倒伏严重而影响起拔夹持的大蒜植株清除, 统计测区内未被归集输送的蒜秧和蒜头数量。结果如表2所示,设计的秧果归集输送装置可用于多行大蒜联合收获机上,作业过程流程、结构合理、性能可靠,蒜秧平均有效收集率97.01%、蒜头有效收集率100%,满足多行大蒜联合收获对秧果收集输送的作业要求。

图6 田间收获试验Fig. 6 Field harvest test
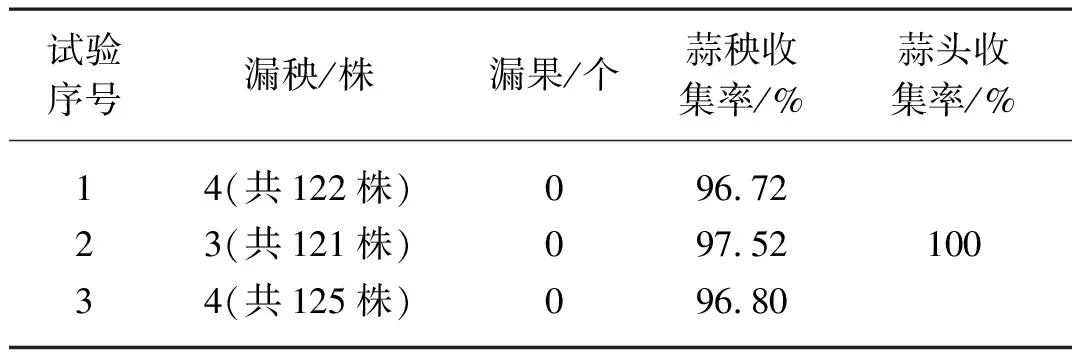
表2 田间试验结果Tab. 2 Field test results
田间收获试验测定的蒜秧收集率略低于台架试验的结果,其主要原因是台架试验过程中人工拔取试验物料,在此过程中未选用长势较小的大蒜植株。而田间试验过程中每行大蒜中不可避免会含有长势较弱的大蒜植株,这类大蒜植株在被夹持输送、切茎和蒜秧引导下落过程中极易出现掉落,影响收集效果。同时,试验过程中发现部分蒜秧未被成功收集的主要原因是在大蒜植株完成切茎作业向后运动时,导秧机构未能及时调整蒜秧下落姿态,而导致蒜秧假茎先行下落,插入归集输送装置链杆中,被带着一起做旋转运动,然后逐渐被甩出掉落,后续将对此部分导秧机构进行优化改进,以期实现更好地蒜秧引导收集效果,进一步提高蒜秧收集率。
4 结论
针对我国现有大蒜多行联合收获秧果归集输送作业分别采用两套装置完成,而极易造成整机结构复杂和动力浪费的问题,设计一种适用于大蒜多行联合收获机的一体式秧果归集输送装置。
1) 秧果归集输送装置通过一条双面带归集板的杆式输送链来分别完成蒜头和蒜秧的归集输送作业,根据收获期大蒜植株特性和多行大蒜同时收获的作业要求,确定了装置呈拐角形结构。其中,关键部件杆式输送链水平段和竖直段的主体长度分别为1 500 mm和800 mm、宽度同为220 mm、高度分别为260 mm和300 mm,输送链的杆条直径为6 mm、间距为38 mm。
2) 以蒜秧收集率和蒜头收集率为试验指标,开展的台架试验和田间试验,结果表明,一体式秧果归集输送装置结构简单合理、性能可靠,蒜秧平均有效收集率分别为98.17%和97.01%、蒜头有效收集率为100%。
猜你喜欢
学苑创造·A版(2023年5期)2023-06-04 14:07:15
机械设计与制造工程(2022年6期)2022-07-20 07:56:20
电力设备管理(2022年2期)2022-02-17 05:58:48
设备管理与维修(2021年13期)2021-09-05 13:05:50
装备制造技术(2019年12期)2019-12-25 03:05:50
专用汽车(2018年10期)2018-11-02 05:32:32
现代园艺(2018年2期)2018-03-15 08:00:02
专用汽车(2016年4期)2016-03-01 04:14:29
数学大王·低年级(2014年8期)2014-08-11 04:43:33
有色金属材料与工程(2013年3期)2013-12-26 15:56:42
