
微型VLBI系统的温度效应改正与精度评估
2021-08-09 07:02王维张志斌KALIUZHNYIMyKolay于亮唐正宏王广利
时间频率学报 2021年2期
王维,张志斌,KALIUZHNYI MyKolay,于亮,唐正宏,王广利
微型VLBI系统的温度效应改正与精度评估
王维1,张志斌1,2,KALIUZHNYI MyKolay3,于亮4,唐正宏1,王广利1
(1. 中国科学院 上海天文台,上海 200030;2. 中国科学院大学,北京 100049;3.尼古拉耶夫天文台,尼古拉耶夫 54030; 4. 西安测绘总站,西安 710054)
微型甚长基线干涉测量(VLBI)系统(MVLBI)因其出色的性价比,在地球静止卫星监测领域展示出其巨大的应用前景。通过在上海建造包括两台天线与3个终端的微型VLBI并置站和开展试观测,发现了微型VLBI时延序列随温度变化而出现异常波动。提出一种线性分段拟合算法分析了时延的该特性,并采用温控措施克服了温度变化所引起的异常效应且获得了稳定的时延序列。基于此,通过在并置站开展如换线法等测试,标校了系统误差并评估了单站精度。结果表明时延序列可能会在温度骤变时产生异常波动,这是由GNSS授时模块的温敏效应引起的。此外,如不考虑系统差,微型VLBI单站的测量精度可达2.6 ns。
甚长基线干涉测量;时延;温度;精度评估
0 引言
随着地球静止卫星(geostationary earth orbit satellite,GEOS)数目的快速增长,地球静止轨道资源已变得相当稀缺。当前可取的一种方法是开展GEOS的高精度监测,从而使得地球静止轨道带上可以容纳更多目标,这便对GEOS的高精度全天时全天候监测提出了需求。作为一项几何相关测时技术,甚长基线干涉测量(very long baseline interferometry,VLBI)广泛应用于天体物理、大地测量以及深空探测中[1]。近年来,VLBI发展趋势已趋于明朗[2],即专镜专用,一方面,大口径天线因其灵敏度较高常被分配以观测射电源或深空探测器等暗弱目标[3],另一方面,13 m口径的宽频速转小天线被用以开展站址坐标以及地球定向参数的监测[4]。然而,还有一种VLBI天线系统尚未被归类,该类天线有着小于2m的 口径,即微型VLBI系统,亦称为被动相关测距系统(passive correlation ranging,PaCoRa),该系统最初由欧洲空间局于2013年提出并开展了仿真及原型机设计[5]。作为一种非侵入式的相关测距方法,可用于接收多类下行链路信号。由于其无源特性,故无需向卫星输入跟踪信号,从而将对航天器和地面运行的潜在影响降至最低。此外,因地面站不需要大型天线,也极大地降低了系统成本;同期,乌克兰尼古拉耶夫天文台基于相同原理,独立开发出一套针对电视通讯GEOS的微型VLBI接收系统,所测时延可用以对Eutelsat-13B GEOS开展公里级精度的定位[6-7];中国科学院上海天文台也于2019年建成了微型VLBI观测网,可对Apstar6C GEOS开展百米级精度的连续轨道监测[8]。
相比于主动式射电观测[9-11]、光学观测、传统VLBI及连线干涉测量系统[12]等方法,微型VLBI系统具有低成本、全天时、全天候以及被动式观测的特点,测站设计简洁、布署便捷,且可实现长基线、长时段、无人值守的GEOS连续监测。因其设计理念中遵循了最高性价比的建设原则,微型VLBI系统中省略了一些传统VLBI所必须的一些部件或观测方法,如相位校正或射电源校正等,这便对该系统的误差校正方法提出了新需求,因此,在远端站布设前对微型VLBI并置站开展误差标校方法研究显得尤为必要。为进一步精化微型VLBI观测系统,需对其随机性和系统性误差开展深入研究。本文对微型VLBI原理、本地测试过程以及系统差评定方法作阐述,并提出一种用以分析温度序列及相应的时延序列的拟合方法,来解释微型VLBI时延变化原因,最后给出系统精度评估方法及结论。
1 观测原理及实验
1.1 VLBI观测GEO卫星原理
如图1所示,微型VLBI观测GEOS原理为:GEOS转发信号的波前依次到达测站1和测站2,通过对两个测站记录信号开展相关处理,可得到两站间的观测时延,进而通过构建星站之间的测量模型,开展误差方程求解,即可实现利用站间时延对GEOS开展定位和定轨。

图1 微型VLBI观测GEOS示意图
1.2 微型VLBI单站信号采集及相关处理
2018年5月,项目组在上海佘山搭建了两台并置站天线,并研发了对应的A和B两套接收终端组成并置微型VLBI站。期间微型VLBI相关时延表现出异常变化,这种变化常出现在本地时间的中午时段。为进一步识别和锁定问题,引入测温仪来监测时延序列和A、B终端不同模块处所对应温度。2018年11月,项目组引入了第3套终端C,至此得到两天线对应3套接收终端的微型VLBI并置站,基于此开展了短基线与零基线的相关测试。



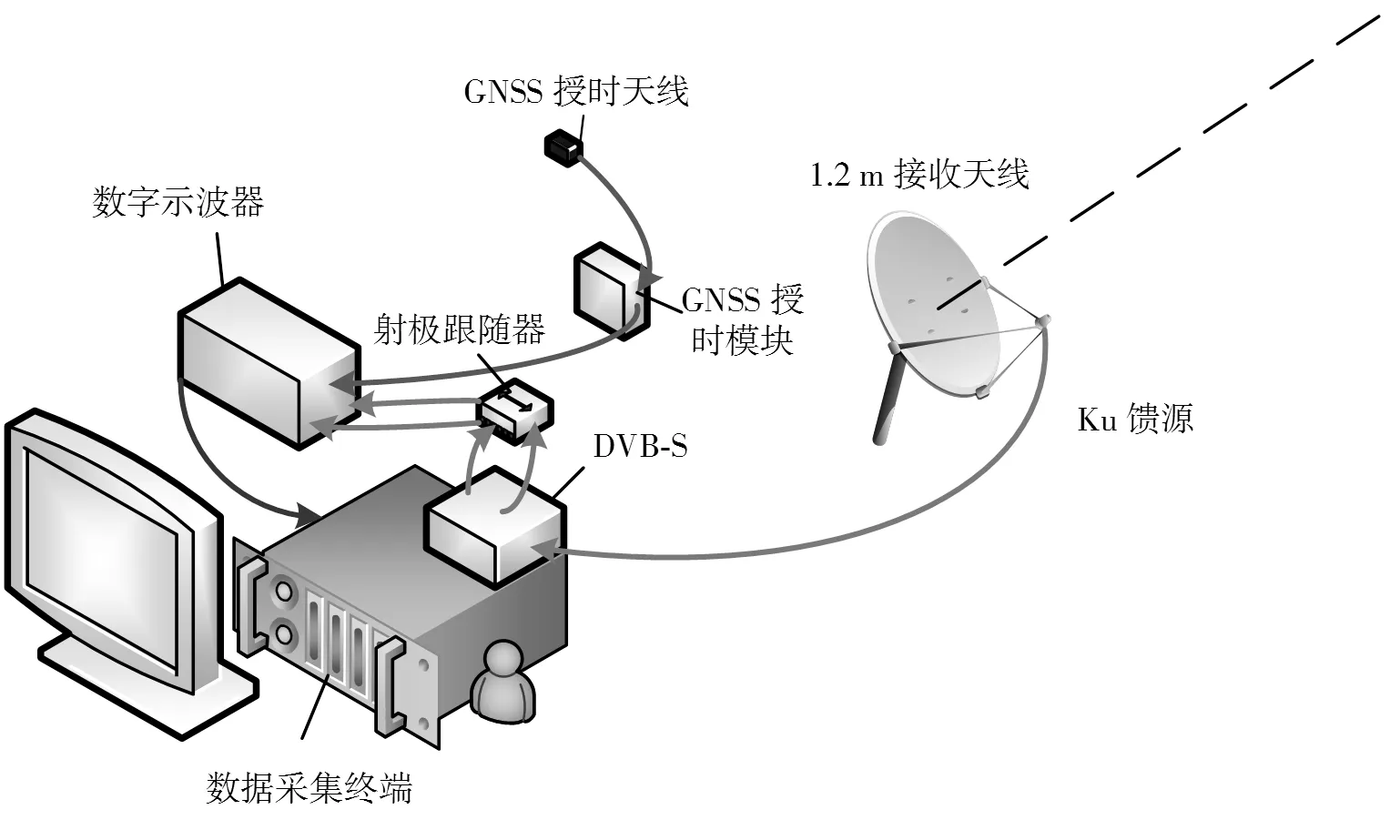
图2 微型VLBI单站组成图
观测目标选取GEOS Apstar6C(134°E;垂直极化;码率:27 500 kbit/s;频率:12.395 GHz),该卫星为电视信号转发卫星。
2 时延与温度的变化关系
2.1 时延序列与温度序列间的相关性
图3所示为时延序列与其对应时刻的环境温度。与转发式测距设备中时延与温度的基本呈线性变化[13]不同,由于并置站的微型VLBI时延观测噪声为几十纳秒,时延与温度间的线性关系并不显著,其表现为,当温度在短期内剧烈上升时,时延序列出现波动。然而,这种相关并非完全相关。时延序列与温度序列中变化的峰值位置是一一对应的,但其他部分的变化却是不一致的。通过计算皮尔逊积差相关系数可知两者间相关度为0.33,这也表明两种序列是中度相关。但从图3来看,较大温差不会引起更高的时延变化。

注:零刻度位于约化儒略日58 382日00:00:00
2.2 时延序列的拟合方法
为分析时延随温度的变化特点,提出一种非连续线性分段拟合方法(discontinuous piecewise linear fitting,DPWLF)来处理该1维时间序列。该算法中的关键是在序列中选取合适的分段位置。考虑到计算效率,提出一种两步法,如下所示:
第二步的目的是在第一步所找出分段点的基础上找出各段间最佳的分段位置。由第一步分段方法可知,每段固定步长的分段序列之间必有一点可使得该点两侧序列的拟后残差值为最小。对所有固定步长序列中的点,都将计算其两侧序列的线性拟后残差,并求出最小残差对应的点位,最终,这些点位即是DPLWF中的近似分段位置。
不同于连续线性分段拟合法,DPWLF可有效减小时间序列的拟后残差,特别是对于某些分散的和快速变化的时间序列。图4中给出一例,图4(a)中是某次调试所得时延序列,图4(b)和(c)分别给出了两步法中的拟合线段。其中SF设为2.0,搜索步长为500点。通过DPWLF的两步拟合,时延序列(单位为m)的拟后残差由4.7 m降到3.6 m。两步法中第二步的必要性可由图4(d)说明,其最小残差点位于第3段分段序列中379点处,即该点应被选为序列2和3之间的分段点。
3 时延序列变化特性及解释
3.1 时延序列的温度特性
这里用小样本来统计分析微型VLBI时延的温度变化特性。结合DPWLF方法,对时延相关所得的微型VLBI时延序列做了拟合,其中,将稳定时延序列定义为其时延率变化不超过特定值,如(7~8)m/min(时延单位已换算为m),考虑到基线与GEOS目标方向近乎垂直的关系,将该值设为30 m/d。
如图5(a)所示,利用DPWLF(SF = 1.5)方法,这里拟合出3段相对稳定的时延序列。图5(b)、(c)和(d)分别给出了这3段时延对应的温度变化。这些温度序列均表现出典型的“U”形变化。当温度在较短时段内(约2 h)且在超过5℃的范围内下降和上升后,此后的时延序列将出现隆起。因此可以推断时延序列的不稳定变化是由于短期内温度缓慢下降和急剧升高而引起的。此外,值得注意的是,时延序列的这种变化是不能用同一的温度模型来改正的,因为不同的接收终端有着不同的温敏特性。如图6所示,与终端C有关的基线在第95~110 h出现了跳动,A、B基线却保持平稳。

3.2 时延序列变动原因
GEOS通常一周开展一次机动,一般不会连续3日在每日同一时段内机动,因此首先排除GEOS目标机动的原因,如仅从微型VLBI接收系统组件角度来看,其中3个组件可能会受温度变化影响,即差分(或相对)电缆时延变化、GNSS授时精度随温度变化或者是示波器的模数转换(ADC)模块。
同轴电缆环境温度变化会引起同轴电缆内金属绑线的伸缩,从而一定程度上引起同轴电缆电容的改变,进而改变电缆时延。文献[14-15]分析了同类型号的电视电缆时延相对于温度的变化,结果表明,当温差达到30℃时,几米长的电缆所产生附加时延的量级在几个皮秒。本试验中,两台微型VLBI并置站间电缆长度差为14.0 m。我们引入了测温设备,实时记录了两条电缆温度,结果表明,针对两条电缆所记录的日最大温差约15℃,由温度变化所引起的相对电缆时延将不超过几十皮秒(对应厘米级),这显然不是时延序列变化的主要因素。
为了进一步从GNSS授时模块和计算机ADC中锁定引起时延序列波动的部件,这里对所有天宝GNSS授时模块做了隔热处理,如图7所示,并由此得到了平稳的时延序列。据此确定了GNSS授时模块的热敏特性是引起时延序列变化的原因。

图7 GNSS授时模块隔热示意图
4 系统误差校正与系统精度评估
在对各接收终端的GNSS授时模块采取温控措施后,可利用平稳时延来校正设备间的系统误差。不同于传统VLBI方法利用射电源校正或相位校正方法来观测GEOS目标,单一功能的微型VLBI站因暂不能改变天线指向,只能观测一定“视场”内的GEOS目标,这样,在将微型VLBI测站部署到远端站点之前,必须严格标定测站间的相对系统差,这包括部件间相对误差标定以及系统开关机测试。这里通过换线法来标记测站间的系统差,具体如下一节所述。
4.1 设备时延校正





式(5)中:中包括两个星站距离和间的差,即几何时延(或);两条电视电缆和间的线缆相对延迟(或);表示线缆与终端相对终端间的时延;表示线缆与终端相对终端间的时延;和统称为设备延迟。线缆和设备名称具体如图9所示。




表1 利用图8(f)(g)(h)所测时延解算的并置站间几何时延、线缆相对时延和设备间相对时延
4.2 系统精度评估



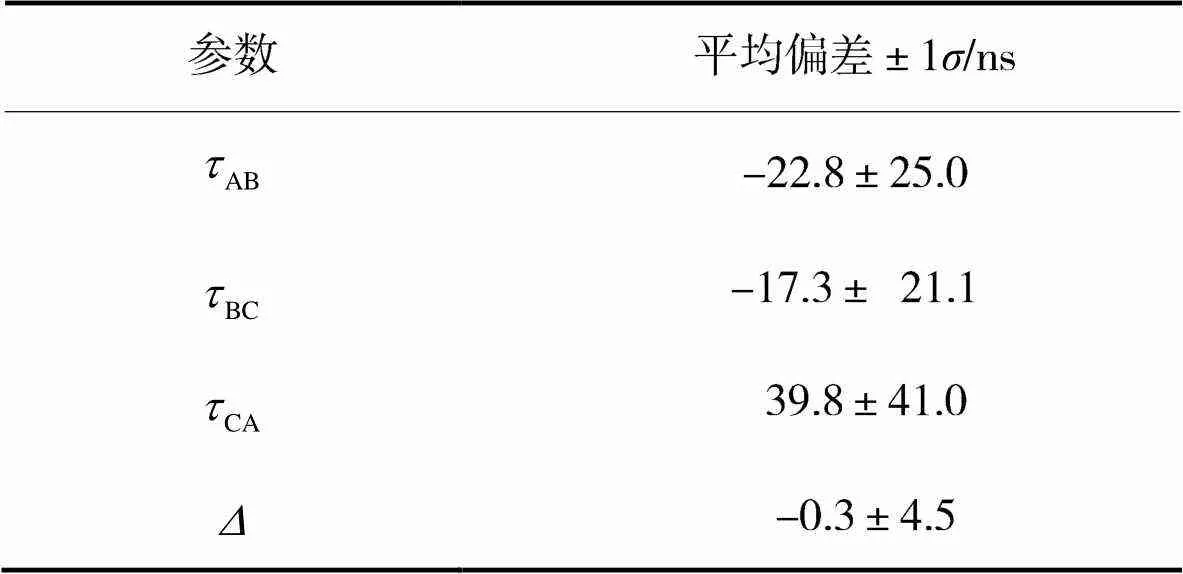
表2 3条基线时延与其闭合时延平均偏差与RMS统计
5 结语
系统差的识别与改正是微型VLBI系统在部署到远端站点前最为关键的步骤。试验结果表明,GNSS授时模块的温敏特性会引起时延序列的异常波动。通过提出连续分段线性拟合法,了解到系统环境温度的缓慢下降与迅速上升会引起该异常波动,且这种异常随不同设备而异,因此无法构建统一模型来改正该异常,只能通过温控的方法来获得平稳时延。基于此设计了换线法和闭合时延分别评估了系统精度和单站接收精度,并验证了评估结果,这些结果均与估计值有着较好符合。本研究为后续微型VLBI长基线布站奠定了基础。
致谢:感谢中国科学院上海天文台李岩、毛银盾等老师对系统组装与观测试验所提供的大力支持。
[1] Schuh H, Behrend D. VLBI: a fascinating technique for geodesy and astrometry[J]. Journal of Geodynamics, 2012(61): 68-80.
[2] 方成. 关于我国未来天文大设备的一点战略思考[J]. 中国科学(物理学 力学 天文学), 2012, 42(12): 1265-1273.
[3] 张波.FAST的VLBI观测与科学[J]. 中国科学(物理学 力学 天文学), 2017, 476(6): 7-16.
[4] NIELL A, WHITNEY A, PETRACHENKO B, et al. VLBI2010: current and future requirements for geodetic VLBI systems[J]. International VLBI Service for Geodesy and Astrometry, 2005: 13-40.
[5] Rodriguez L, Krier G, Thill M, et al. Passive ranging for geostationary satellites: on a novel system and operational benefits[C]//13th International Conference on Space Operations, AIAA: Pasadena, 2014: 1857-1863.
[6] Bushuev F, Kalyuzhny M A, Slivinsky A P, et al. Ranging geostationary telecommunication satellites with satellite TV signals[J]. Telecommunications & Radio Engineering, 2016, 53(5): 5-16.
[7] Bushuev F, Kaliuzhnyi M, Sybiryakova Y, et al. Results of the ongoing monitoring of the position of a geostationary telecommunication satellite by the method of spatially separated basis receiving of digital satellite television signals[J]. Latvian Journal of Physics & Technical Sciences, 2016, 53(5): 5-16.
[8] 张志斌, 王维, 杨鹏, 等. 一种用以同步微型监测的微型VLBI网[EB/OL]. (2020-04-23)[2020-08-25]. http://gb.oversea.cnki.net/KCMS/detail/11.1859.V.20200422.1839.008.html.
[9] Peltzer K E. Apollo unified S-band system[EB/OL]. (1996-07-29)[2020-08-05]. https://ntrs.nasa.gov/citations/19660018739.
[10] Harles G, Siebert P, Eberlein E, et al. A novel ranging method using DVB-S transport stream packets[C] // Proceeding of the Seventh International Workshop on Digital Signal Processing Techniques for Space Communications, Sesimbra: [s.n.], 2001.
[11] 雷辉, 李志刚, 杨旭海, 等. 基于转发式的北斗卫星导航系统地球静止轨道卫星精密定轨试验[J]. 测绘学报, 2011, 40(S1): 31-33.
[12] 杜兰, 李晓杰, 王若璞. 基于同波束CEI的GEO共位卫星相对轨道监视[J]. 大地测量与地球动力学, 2012, 32(3): 54-58.
[13] 武文俊, 李志刚, 李孝辉, 等. 转发式测距设备时延中的温度效应[J]. 时间频率学报, 2013, 36(2): 113-119.
[14] Czuba K, Sikora D. Temperature stability of coaxial cables[J]. Acta Physica Polonica A, 2011, 119(4): 553-557.
[15] Parashare C R, Richard F B. 75ΩTransmission System[EB/OL]. (2011-09-26)[2020-08-05]. http://eor.berkeley.edu/wpcontent/uploads/2011/09/p011.cparashare.pdf.
Thermal effect correction and accuracy evaluation on MVLBI
WANG Wei1, ZHANG Zhi-bin1,2, KALIUZHNYI MyKolay3, YU Liang4,TANG Zheng-hong1, WANG Guang-li1
(1. Shanghai Astronomical Observatory, Chinese Academy of Sciences, Shanghai 200030, China;2. University of Chinese Academy of Sciences, Beijing 100049, China;3. Mykolayiv Astronomical Observatory, Research Institute, Mykolayiv 54030, Ukraine;4. Xi’an Division of Surveying and Mapping, Xi’an 710054, China)
With the advantages of being cost effective, the micro VLBI system (MVLBI) shows a great application prospect in geostationary satellite monitoring. We built a co-location station with two antennas and three terminals in Shanghai, and found that the time delay series fluctuates abnormally with temperature changes. A linear piecewise fitting algorithm is developed to analyse this characteristic. Besides, temperature controls are taken to overcome the abnormal effect caused by temperature changing, then the stable delay series is obtained. Thus, by performing tests such as the cable changing method at the co-location station, systematic errors are calibrated and the accuracy of single station is evaluated. It shows the delay series may vary abnormally with the sharp temperature change, due to the thermosensitive in GNSS timing module. In addition, the tested accuracy of the single MVLBI system can reach up to 2.6 ns regardless of systematic errors.
VLBI; time delay; temperature; accuracy evaluation
10.13875/j.issn.1674-0637.2021-02-0142-11
王维, 张志斌,KALIUZHNYI M, 等. 微型VLBI系统的温度效应改正与精度评估[J]. 时间频率学报, 2021, 44(2): 142-152.
2020-11-16;
2020-12-05
国家自然科学基金资助项目(1703067;11873077);探月工程三期测控系统关键技术研究资助项目
猜你喜欢
科学(2020年5期)2020-11-26
通信电源技术(2020年8期)2020-07-21
数学小灵通·3-4年级(2020年4期)2020-06-24
中国惯性技术学报(2019年3期)2019-10-15
电子制作(2019年23期)2019-02-23
小学生学习指导(低年级)(2018年11期)2018-12-03
中学生数理化·高一版(2018年1期)2018-02-10
舰船电子对抗(2016年5期)2016-12-13
太空探索(2016年9期)2016-07-12
现代防御技术(2016年1期)2016-06-01
