
基于上下文模糊C均值聚类的图像分割算法
2021-07-29 03:35徐金东赵甜雨冯国政欧世峰
电子与信息学报 2021年7期
徐金东 赵甜雨 冯国政 欧世峰
①(烟台大学计算机与控制工程学院 烟台 264005)
②(烟台大学光电信息科学与技术学院 烟台 264005)
1 引言
随着实际需求的增加,解决图像噪声以及数据不确定性成为图像分割领域的一个重要问题[1]。FCM能较好地对数据不确定性建模[2–5],但对噪声污染、对比度低的视觉内容较为敏感,难以直接应用于实际含噪图像分割[6]。
为有效地抑制噪声干扰,研究者将局部空间信息融入FCM算法中[7,8]。Ahmed等人[9]通过在FCM的目标函数中添加空间邻域项,提出了一种带约束的模糊聚类(Fuzzy C-Means clustering with Spatial constrains, FCM_S)算法。为降低FCM_S的计算复杂度,Chen和Zhang[10]引入均值滤波和中值滤波,降低了FCM_S的计算成本。但FCM_S1和FCM_S2对于噪声的类型以及强度缺少一定的稳健性[11]。为更好地去除噪声并保留细节,Krinidis和Chatzis[12]提出了一种模糊局部信息C均值聚类算法(Fuzzy Local Information C-Means clustering,FLICM),该算法有效利用了图像的局部空间信息,但对邻域总体上下文信息尚欠考虑,故在边界区域分割效果不理想[11]。Lei等人[13]通过引入形态重建操作,提出了一种基于形态重构和隶属度滤波的快速鲁棒模糊C均值聚类算法(Fast and Robust Fuzzy C-Means clustering algorithm, FRFCM),用隶属度滤波代替传统的距离计算,以保证优越的抗噪声性能,但聚类结果过于平滑,丢失过多的细节信息。Xing等人[14]提出了一种基于邻域信息的区间2型模糊聚类方法(Interval Type-2 Fuzzy CMeans clustering combining neighborhood information, nr-IT2FCM),并将该方法应用于遥感图像分割,有效地抑制了遥感图像中相同物体的不均匀性,但缺乏F C M 噪声抑制上的考虑[15,16]。
本文从噪声抑制和图像细节保留出发,通过定义一个新的模糊局部相似性度量,并充分考虑了像素的空间邻域信息,引入评价指标来估计相邻像素可靠性,提出了一种基于空间上下文可靠性的模糊C均值聚类算法(Reliability-based Spatial context Fuzzy C-Means, RSFCM)应用于图像分割。
2 RSFCM算法
2.1 上下文可靠性度量模型

2.2 RSFCM模型示意图
2.3 RSFCM算法流程
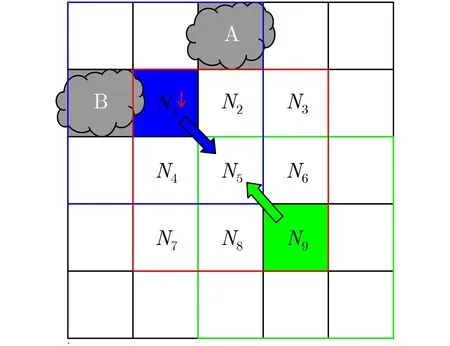
图1 基于上下文可靠性度量模型示意图
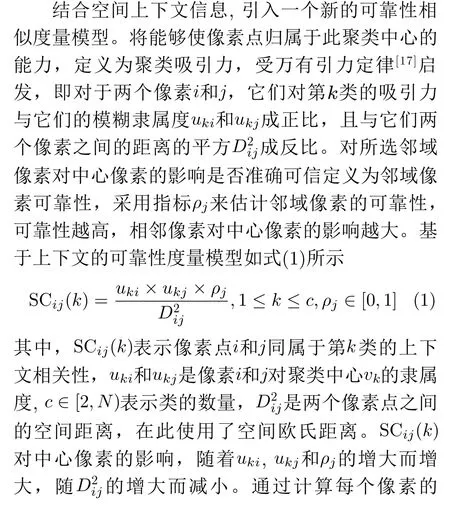
结合上下文可靠性度量SCij(k),提出了一种新的聚类框架,将局部空间和灰度信息纳入常规FCM的目标函数中,以提高对图像分割的精确度。对于给定的样本集D={x1,x2,···,xN},目标是将样本集划分为c个互不相交的集合:C={C1,C2,···,Cc}。其目标函数J如式(4)



RSFCM的算法流程如图2所示,具体实现步骤如下。

图2 RSFCM聚类算法流程图
(1)初始化聚类数c,模糊权重指数m,迭代终止数T,局部窗口Ni的大小,阈值ε和迭代次数t=1,以及随机初始化隶属矩阵U;
(2)根据式(1)计算上下文相关性SCij(k);
(3)在步骤(2)的基础上,根据式(5)和式(6)计算聚类中心vk和隶属度值uki;

2.4 抗噪性能测试
考虑两种基本情况来描述RSFCM算法对噪声的鲁棒性和细节保留能力,以椒盐噪声为例,使用合成图像聚类来评估算法的抗噪性能。合成图像大小为128像素×128像素,4等分为2个类别,灰度值分别为20和120,添加密度为0.03的椒盐噪声,如图3(a)和图4(a)所示。
情况1(图3):中心像素不是噪声,其局部窗口内的某些像素被噪声破坏,如图3。如图3(b)所示,将合成图片分成两类,噪点像素的灰度值为0和255。结果表明,经过15次迭代,RSFCM算法收敛,并且相应的噪声隶属度也随之收敛。图3(c)和图3(d)为分别属于类别1和类别2的像素初始隶属度,图3(e)–3(f)为经过15次迭代后,属于两个类别的像素的最终隶属度,可以看出,SCij(k)抑制了噪点像素的影响,使该算法对噪声变得更加稳健。同时证明,在边界区域该算法的有效性。
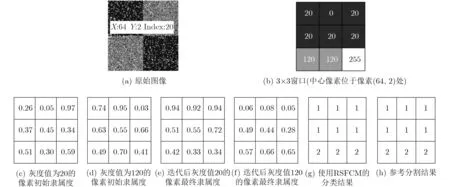
图3 RSFCM对含噪声合成图像的聚类结果(情况1)
情况2(图4):中心像素被噪声破坏,而其局部窗口内的存在其他像素未被噪声破坏,如图4。如图4(b)所示,将合成图片分成两类,噪点像素的灰度值为0和255。图4(c)–(d)为分别属于类别1和类别2的像素初始隶属度,图4(e)–(f)为经过15次迭代后,属于两个类别的像素的最终隶属度,SCij(k)的可靠性局部相似性度量使有噪声的中心像素的隶属度值收敛到类似于相邻像素的隶属度值。因此,SCij(k)增强了算法对噪声的鲁棒性。
3 实验结果与分析
实验分别选取人工合成图像、交通标志图像和遥感图像3类数据进行测试。实验统一设置模糊指数m为2、迭代次数为20次。采用目视判读和客观指标(峰值信噪比(Peak Signal to Noise Ratio,PSNR)、Jaccard相似系数(Jaccard Similarity,JS)[18]、Kappa系数和总体精度(Overall Accuracy,OA))来评价分割效果,并与FCM, FLICM,FCM_S1, FCM_S2, nr-IT2FCM和FRFCM进行了比较[19]。
3.1 合成图像的分割实验
合成图像如图5(a)所示,图像大小为128像素×128像素,4等分为2个类别,即c=2,灰度值分别为20和120,并分别被不同级别的椒盐噪声和高斯噪声污染。在图5(a)中,左侧上下两个方框图像被密度为0.05椒盐噪声污染,右侧上下两个方框图像被均值为0、方差为0.03高斯噪声所污染。

图5 合成图像的分割结果
各种聚类算法的图像分割结果如图5(b)–5(h)所示。可见,FCM(图5(b))较大程度上受到噪声的影响,算法对噪声缺乏足够的鲁棒性;FCM_S1(图5(c))和FCM_S2(图5(d))消除了大部分噪声,但同时也失去了一定的边界细节;FLICM(图5(e))抑制了一定噪声,但在左上图像框部分,可以清楚地看到椒盐噪声,说明该算法对此类噪声缺乏稳健性,且在识别类边缘像素方面也有局限性;nr-IT2FCM(图5(f))过多地保留了图像细节,但抗噪性能较差;FRFCM(图5(g))基本消除了噪声影响,对噪声强度和噪声类型表现出较好的稳健性,但在图像边界部分,细节保留欠佳,边缘不够平滑;RSFCM(图5(h))可以消除绝大部分高斯噪声和椒盐噪声,且在边缘部分划分较为完整平滑,在降噪同时保留了较好的边缘。
表1是不同算法聚类结果的PSNR比较。可见FCM算法和nr-IT2FCM算法的PSNR最低,对实验设置的噪声鲁棒性最差。FRFCM是由于该算法中添加了形态重构滤波的操作,致使算法对噪声的鲁棒性较好。FCM_S1和FCM_S2的PSNR较高,这是由于这两个算法中分别添加了均值滤波和中值滤波,有一定的抗噪效果。所提出的RSFCM算法的PSNR最高,在抗噪方面表现最优。结合目视评价结果,RSFCM的综合表现优于比其他聚类算法。

表1 合成图像分割结果的PSNR比较(dB)
表2给出了7种算法对合成图像分割结果的精度比较,该合成图像分别受到不同噪声、不同级别的破坏。结果表明,所提出的RSFCM算法具有更好的降噪性能,相对于其他6种算法,该算法对不同类型、不同级别的噪声均具有较好的鲁棒性。

表2 不同噪声级别下合成图像分割结果的JS系数比较
3.2 交通标志图像的分割实验
交通标志图像分割是智能交通系统的重要组成部分之一,复杂的路况、恶劣的天气、车辆的抖动和照明条件的变化等通常使交通标志识别受到噪声的影响[20]。此处选用一幅实际交通标志图(图6(a))。在图6(b)中,添加密度为0.03的椒盐噪声、均值为0、均方差为0.01的高斯噪声,将其分为两类,即c=2。
图6(c)–6(i)是7种聚类算法的分割结果。可以看出,FCM分割结果(图6(c))受噪声的影响很大,该算法对噪声缺乏足够的鲁棒性。FCM_S1算法(图6(d))增加了均值滤波,但是仍然存在一些噪声未消除,这表明FCM_S1对噪声类型缺乏鲁棒性。FCM_S2(图6(e))消除了大部分噪声,但在边缘部分丢失了一些细节。FLICM (图6(f))对噪声有一定的抑制作用,但是边界部分分割不够平滑。nr-IT2FCM(图6(g))过多地保留了图像细节,抗噪性能较差。FRFCM(图6(h))基本上消除了噪声的影响,并且对噪声强度和类型表现出良好的鲁棒性,但在图像边界部分,细节保留仍然较差,边缘不够光滑。RSFCM(图6(i))可以消除大多数高斯噪声以及盐和胡椒噪声,并且边缘部分的划分相对完整和平滑,同时保留了良好的细节信息。

图6 实际交通标志图像的分割结果
表3是针对不同算法的聚类结果的PSNR的比较。可以看出,FCM算法和nr-IT2FCM算法具有最低的PSNR,噪声鲁棒性最差。FCM_S1和FCM_S2的PSNR较高,这是由于在这两种算法中添加了均值滤波和中值滤波,具有一定的抗噪效果。FRFCM的较高PSNR是由于添加了形态重构。与其他6种算法相比,RSFCM算法具有最高的PSNR。结合视觉评估结果,RSFCM的边界更平滑,整体性能良好。

表3 交通标志图像分割结果的PSNR比较 (dB)
3.3 遥感图像的分割实验
遥感图像固有的“同谱异物”和“同物异谱”问题使图像分割具有很大的不确定性[21],故以遥感图像测试分割算法性能具有重要实际意义。此处选择了2007年12月3日采集的珠海地区SPOT5多光谱遥感图像作为实验测试数据,空间分辨率为10 m,使用3个波段B1,B2和B3合成的假彩色图像,如图7(a)所示,该区域覆盖了由水域、草地、林地、裸地和建筑工地等地物,实验将其分为5类,即c=5。
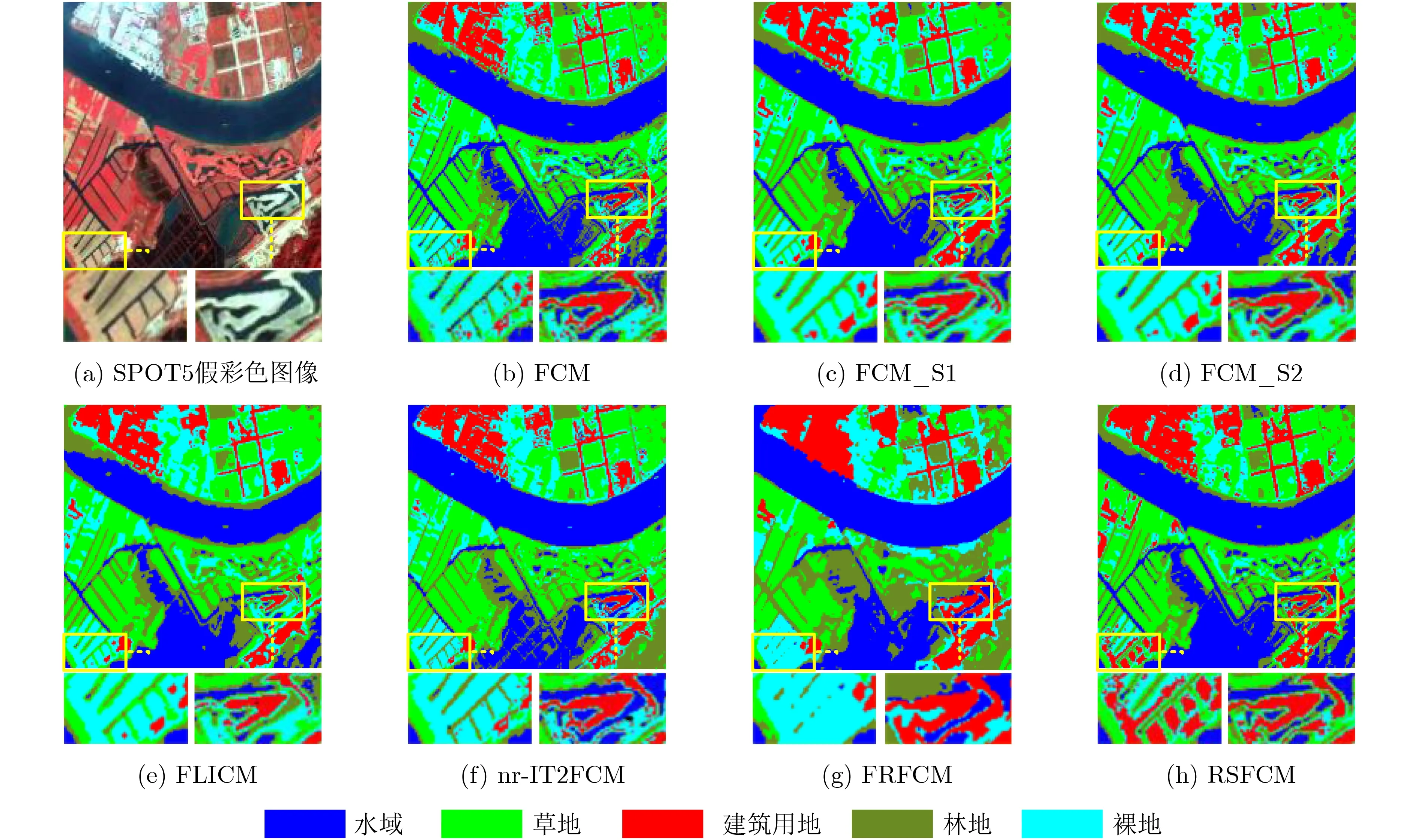
图7 遥感图像的分割结果
图7(b)–7(h)是不同算法的分割结果。见图中标注的区域1和区域2两个部分,显然,FCM算法(图7(b))难以区分具有光谱重叠的地物,例如,区域1的分割结果比实际面积要小,它的边缘部分地被错分为了裸地,而区域2部分被错分为了草地;FCM_S1和FCM_S2算法(图7(c)–7(d))保留了更多细节,并且受噪声干扰较小,但分割结果在类内并不均匀,边界不平滑;FLICM算法(图7(e))抑制了一定的噪声并保留了较多的图像细节,但该方法在识别类边界像素和保留图像细节方面仍然存在不足;nr-IT2FCM (图7(f))能较好地描述由噪声或异构点引起的遥感图像的不确定性,但在边缘部分丢失了部分细节,边界过于平滑;在图7(g)中,FRFCM过多地抑制了噪声干扰,使分割结果显得过于平滑,在光谱混叠区域易产生错分情况。所提出的RSFCM (图7(h))算法不仅抑制了一定噪声,而且保留了大量的细节,在图像细节保留和异构信息抑制之间有一定的平衡,特别是在边界区域,分割边界更平滑、分割更均匀。
表4为7种聚类算法的总体分割精度和Kappa系数。由表可见,RSFCM在水域和建筑工地分割上得到了最大的精度,同时在所有比较算法中,RSFCM具有最高的总体精度和Kappa系数。以总体精度为例,RSFCM的值为91.57%,分别比FCM, FCM_S1, FCM_S2, FLICM, nr-IT2FCM和FRFCM提高了4.13%, 1.79%, 2.25%, 5.22%,8.05%和8.76%,整体表现优于其他聚类算法。

表4 遥感图像分割结果的OA(%)和Kappa系数比较
4 结论
本文提出了一种基于上下文可靠性度量的模糊C均值(RSFCM)聚类算法,使用基于可靠性的空间相关模型来控制相邻像素之间的相互影响,并平衡像素可分性和类内异质性来提高图像分割的鲁棒性与准确性。RSFCM具有以下优良特性:
(1)可以充分利用像素空间上下文模型描述像素之间的关系;
(2)通过局部空间和中心像素之间的灰度关系,能自动确定局部相似性度量;
(3)使用可靠性度量,确保邻域信息的准确性,尽可能减少噪声对图像分割的影响;
(4)平衡噪声抑制和图像细节保留两个方面,提高聚类算法的鲁棒性和准确性。
实验结果表明,RSFCM具有更好的抗噪性能和细节保留,分割结果更加紧凑、边界更为清晰。
猜你喜欢
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
中学生数理化(高中版.高二数学)(2016年4期)2016-03-01
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
数学年刊A辑(中文版)(2014年4期)2014-10-30
郑州大学学报(理学版)(2014年4期)2014-03-01
