UWB与GNSS结合的室内外一体化定位系统设计
2021-07-29 05:18潘国富欧阳仲南崔博浩
导航定位与授时 2021年4期
潘国富,欧阳仲南,崔博浩
(广州市中海达测绘仪器有限公司,广州 511400)
0 引言
随着电力北斗安全应用、智能无人驾驶、手机室内导航等新兴行业及应用的发展,用户对室内外一体化定位及导航的需求日趋增长。回顾目前各种室内定位技术,包括基于WiFi[1]、ZigBee、蓝牙[2]、地磁场特征、射频识别(Radio Frequency Identification,RFID)[3]、音频[4]、惯性元器件[5]、计算机视觉[6]、超宽带(Ultra Wide Band,UWB)和5G通信基站信号等传感器的室内定位方案,主要解决室内场景的定位问题,不同的技术流派定位精度各异,从分米级、亚米级、米级到50m不等,同时在精度、成本、可靠性和环境适应性等方面也各有不同[7-8]。其中UWB信号因具有带宽较大、传输速率高、时间分辨率高、抗多径能力强的特性,同时具有较强的穿透障碍物的能力,因此在有物体遮挡或干扰较大的环境中依然能正常收发[9-10],且定位精度相对较高,因而在专业市场得到了广泛应用,例如矿业井下作业管理[11]、工业制造、公检法人员及物品管理、电厂/变电站巡检人员安全管理[12]以及物流、隧道、地铁等场景中。
传统的室内定位标签以独立的工牌或手环形式佩戴,只能在室内区域进行定位,因此不能满足室内外一体化连续定位的需求。本文将UWB定位技术与全球卫星导航系统(Global Navigation Satellite System,GNSS)技术、无线通信技术集成到手持智能设备上形成一体化终端,在服务端进行卫导结果与超宽带定位结果的融合,从而获得连续定位结果,并利用实时轨迹数据实现对人员和重要设施的在线监测,通过划定作业区域和时间,实现对作业人员是否进入危险区域的预警提醒,保障作业人员安全。
1 UWB室内定位技术
UWB定位系统由基站、定位标签和解算服务器3个部分组成,通过获取标签到不同基站的几何距离计算出标签的实时位置,定位模式包括:基于到达时间(Time of Arrival,TOA)、基于飞行时间(Time of Flight,TOF)、基于到达时间差(Time Difference of Arrival,TDOA)、基于到达角度(Angle of Arrival,AOA)等几种,下面进行简单介绍。
1.1 TOA 定位方式
通过测量UWB信号从定位标签(Tag)发出到附近3个以上不同定位基站(Anchor)的时间,将时间差乘以光速即可获得标签到基站天线的距离观测值,进而根据平面几何原理确定出标签的位置,TOA定位原理如图1所示。

图1 TOA定位方法示意图Fig.1 Schematic of TOA positioning method
如图1所示,设标签P同时发射信号到A、B、C这3个基站,获得距离观测值,观测方程如式(1)
(1)
式中,(XA,YA)、(XB,YB)、(XC,YC)分别为A、B、C这3个基站的已知坐标;LA、LB、LC分别为标签到基站的距离观测值;(X,Y)为待求标签坐标。按式(1)中3个方程解2个未知数,将方程组进行线性化后用最小二乘即可求出P点坐标,实际解算中考虑到测距精度受信号遮挡、天线群延迟的各向异性以及多路径等误差源的影响,对各种误差进行分类建模,利用卡尔曼滤波方法[13]获取最优估计的标签坐标。
1.2 TOF定位方式
TOF由TOA演化而来,它的定位方法与TOA在本质上是相同的,差别仅在于测量距离的方式不同:TOA使用时间戳进行测距,因此对硬件的时间同步精度要求较高;而TOF则使用时间段测距,从而避免了不同设备之间时钟严格同步的要求,在一定程度上减少了由时钟偏差引起的误差,提高了测距精度,但由于需要双向测距,标签的功耗相比单向测距的方式更高。
1.3 TDOA定位方式
TDOA定位模式下,标签的功耗相对较低,系统也容易承载较多数量的标签同时工作,其通过测量UWB信号从标签到2个不同的UWB基站之间传播时间的差值,乘以光速即可得到距离差。由于平面上与2个固定点(基站)的距离差是常数的点的轨迹是双曲线,所以TDOA定位方式又称为双曲线定位。TDOA是对TOA算法的改进,它并不是直接利用信号到达时间,而是利用多个UWB基站接收到信号的时间差来确定移动目标的位置,这样标签与基站之间就不需要严格的时钟同步,只需要基站之间保持时间同步即可,TDOA定位原理如图2所示。
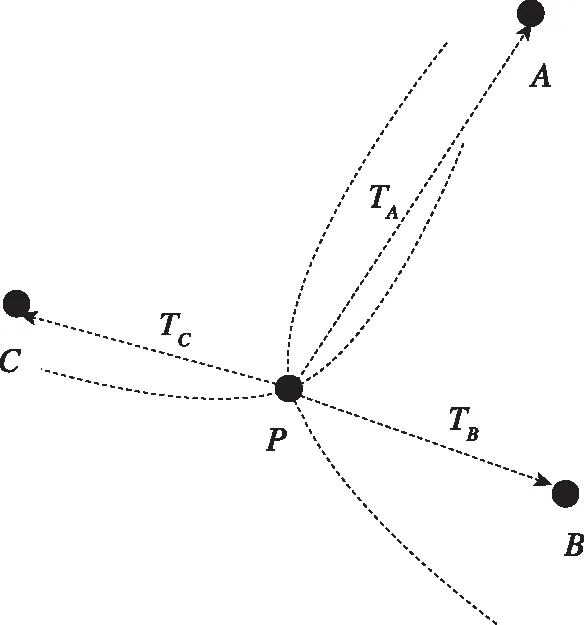
图2 TDOA定位方法示意图Fig.2 Schematic of TDOA positioning method
如图2所示,任意时刻系统可以测量标签到不同基站的时间差dT=TA-TB,乘以光速即可得到标签到不同基站之间的距离差观测值,观测方程如式(2)
(2)
式中,(XA,YA)、(XB,YB)、(XC,YC)分别为A、B、C这3个基站的已知坐标;LAB、LBC、LCA分别为标签到2个基站的距离差;(X,Y)为待求标签P点坐标。
1.4 AOA定位方式
AOA定位方式并不测量标签与基站的距离,而是通过基站的天线阵列获取UWB标签信号的入射方向,以此来推算基站与标签之间的角度,利用三角测量法计算出标签的位置坐标。AOA一般只需要2个基站即可定位,其定位原理如图3所示。

图3 AOA定位方法示意图Fig.3 Schematic of AOA positioning method
如图3所示,由于定位基站A、B的位置已知,通过测量获取基站到标签的方向角,则容易求出P点到A、B轴向的夹角值∠A、∠B,观测方程如式(3)
(3)
式中,(XA,YA)、(XB,YB)分别为A、B这2个基站的已知坐标;∠A、∠B分别为标签到2个基站连线的夹角观测值;(X,Y)为待求标签坐标。按式(3)中2个方程求解2个未知数,即可求出P点坐标。
AOA定位方式减少了硬件部署的数量,但是由于测角精度很大程度上受到基站安装高度的影响,有效定位区域的面积一般都不大,精度也较差。
综上所述,TOA方法具有功耗小、平滑性好的优点;TOF方法具有基站数量需求少的优点;TDOA方法具有在复杂环境下定位能力强的优点;本文服务器解算策略是根据信号质量混合使用模型的计算结果。
2 室内外一体化定位系统设计
2.1 硬件设计
为便于用户携带和使用,本文设计的一体化定位终端将UWB定位芯片与GNSS定位芯片集成到手持智能设备中。硬件内核采用ARM公司的Cortex A53高性能处理器,GNSS采用支持实时动态差分法(Real-Time Kinematic,RTK)定位的u-blox公司的F9p小型双频定位模块,UWB模块采用Decawave公司芯片,设计预留惯性测量单元(Inertial Measurement Unit,IMU)传感器接口,同时设计带有4G模块,以便数据实时回传到服务器,硬件架构设计图如图4所示。
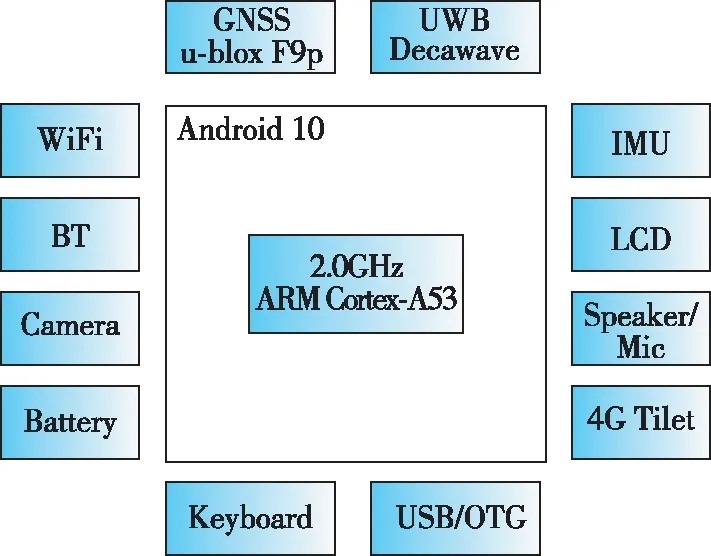
图4 一体化定位终端硬件框架图Fig.4 The frame diagram of GNSS/UWB fusing device
2.2 系统架构设计
基于GNSS的室外场景高精度定位技术已经非常成熟:终端通过网络模块接入连续运行参考站(Continuously Operating Reference Stations,CORS)系统获得RTCM差分数据流,并传入GNSS定位模块即可进行RTK解算,从而获得高精度定位结果,本文不再赘述。
当用户进入到室内场景时,一体化终端上的UWB标签将以固定频率发射信号到UWB基站,基站将观测信号传到定位服务器进行解算后,获得用户室内坐标并推送到人员监控平台,平台融合GNSS解与UWB解后写入数据库中,然后便能为APP或网站应用提供用户轨迹信息,系统示意图如图5所示。
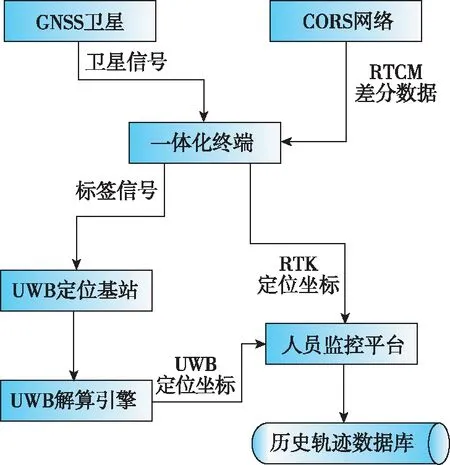
图5 GNSS/UWB定位系统示意图Fig.5 Schematic of GNSS/UWB positioning system
当用户从室外环境向室内环境移动时,由于卫星受到遮挡,GNSS芯片接收到的卫星数将减少,定位结果出现浮动、单点、精度下降,直至无解。同时随着用户定位终端不断靠近室内基站,定位标签接收到的基站数目也将增多,监控平台根据解状态进行定位模式的切换。
3 仿真验证
为了能够验证本文室内外定位系统的运行效果,选择在笔者办公区域进行测试。
3.1 定位基站部署
为实现室内外坐标系统的统一,在天台开阔区域用RTK连接CORS采集解算中误差优于1cm的固定解坐标作为起算点,再用1s精度的全站仪联测获得室内UWB基站(图中星号标记)和测试点位(图6中三角形标记)的准确坐标。本文实验共安装4个UWB基站并用网线与解算服务器连接,部署平面如图6所示。

图6 实验总体设计图Fig.6 Overall design of experiment
基站空间布局会影响最终定位精度,在生产项目中遇到面积较大的室内定位系统基站布局设计时,可利用几何精度衰减因子(Geometric Dilution of Precision,GDOP)对不同布局方案进行设计评定。
3.2 动态轨迹测试
笔者手持一体化定位终端,从室外天台走入办公室内,系统端实时显示运动轨迹,事后将数据库记录的轨迹坐标展示到平面图中,动态轨迹图如图7所示。
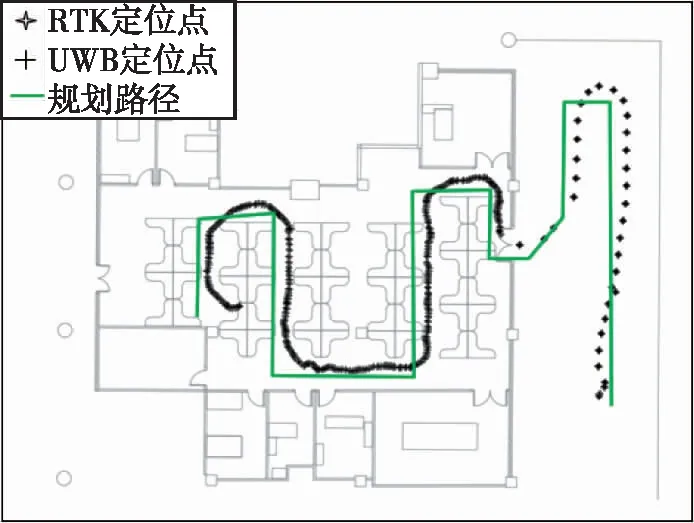
图7 动态测试轨迹图Fig.7 Positioning trajectory of dynamic test
从图7可以看出,用户在室内外环境中均能输出定位结果,定位轨迹与实际行走路线相符,卫星定位与UWB定位轨迹平滑过渡,说明终端能够进行连续的一体化定位。根据参考文献[14]的方法,还可利用智能终端设备上的惯性测量值,对UWB室内定位结果进行动态平滑滤波。
3.3 静态精度测试
为进一步评估室内定位系统的定位精度,分别在6个测试点位上进行静置采集120s,共计1200个历元数据,然后按不同的方向统计内符合中误差,计算公式如式(4)
(4)
式中,N为测试点个数;Δi为各观测值与平均值之差。
外符合中误差计算公式如式(5)
(5)

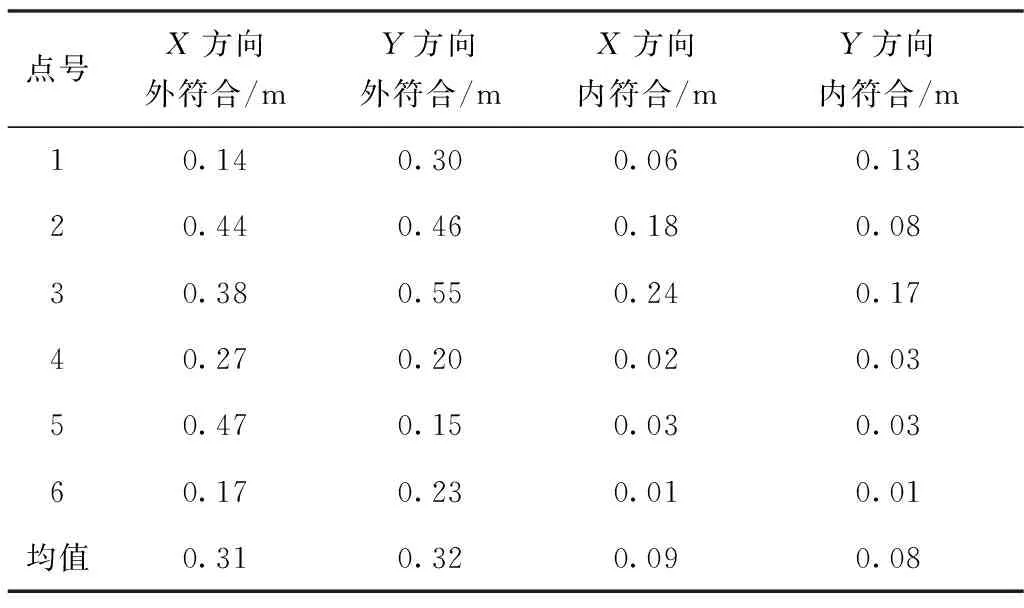
表1 静态测试精度统计表
从测试结果可以看出,UWB定位内符合精度各方向平均值小于10cm,外符合精度各方向平均值约30cm,满足室内环境人员安全管理的精度要求。由于客观条件所限,本文实验基站安装在不同房间,中间柱子与玻璃隔墙较多,信号质量较差,导致个别点位精度波动较大,这也是实际项目中面临的主要问题,可以通过加密基站和优化基站位置等方法进行改善。
4 结论
本文针对电力北斗安全应用及智能无人驾驶领域面临的室内外无缝定位需求,设计开发了一套UWB与GNSS结合的软硬件系统。实验结果表明:
1)通过坐标联测统一GNSS与UWB定位的坐标系统后,可以实现室内外一体化无缝定位,UWB动态定位精度明显弱于静态定位精度。
2)静态定位精度可以达到10cm,不同点位精度差异较大,说明UWB定位精度受室内环境影响较大。
3)本文初步设计实现了室内外一体化定位的硬件及系统,受时间精力所限,尚未解决室内定位精度易受基站数量和信号干扰影响的问题,下一步将研究GNSS定位技术、UWB技术、惯性传感器和视觉等多源传感器技术融合[15],以进一步提高系统鲁棒性。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
中国新通信(2022年4期)2022-04-23
导航定位学报(2022年1期)2022-02-17
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
恋爱婚姻家庭·青春(2019年9期)2019-12-10
恋爱婚姻家庭(2019年26期)2019-09-14
文萃报·周二版(2019年32期)2019-09-10