
基于坐标变换技术的无人机避障策略
2021-07-28 10:43宋福根吕学伟
电气技术 2021年7期
宋福根 吕学伟
基于坐标变换技术的无人机避障策略
宋福根 吕学伟
(福州大学电气工程与自动化学院,福州 350000)
由于人工巡检输电线路效率低且成本高,故采用无人机进行输电线路巡检已经成为一种趋势。避障是无人机巡检工作的重要一环,本文提出以极坐标变换后的电场强度均值为避障参量实现高精度避障。首先,说明基于坐标变换技术的无人机避障原理;然后,以单回输电线路水平排列方式为例,研究无人机巡检预警避障和极限避障策略;最后,根据实测的电场强度数据对避障策略进行验证。结果证明,基于极坐标系电场强度均值的方案能够准确高效地实现无人机避障目的。
无人机;避障;输电线路;电场强度;坐标变换
0 引言
输电线路的巡检工作是保障电网安全运行的重要一环,而高效精准的避障又是保障无人机安全工作的关键。在无人机巡检输电线路[1-2]时,为了尽可能靠近巡检对象(输电线路、杆塔等),同时为提高作业的安全性,防止碰撞事故发生并减小人工操作成本[3],可为巡检无人机配备一套高精准性、高灵敏度的避障系统,以实现避障目的,从而保障无人机巡检工作顺利进行。
目前常用的避障系统有红外避障[4]、超声波避障[5-6]、雷达避障[7-9]、三维地图通用分组无线服务技术(general packet radio service, GPRS)避障[10-11]和基于输电线路电磁场原理的避障[12-15]几种。前几种传统的避障方法都存在一定的缺陷:红外避障由于作用距离很短,所以在室外光线强的情况下基本不能使用;超声波避障的有效作用距离很难超过10m,且机翼对空气的干扰使其更难应用;雷达避障存在反射波过滤较难、识别避障目标较难等问题,另外雷达避障设备体积较大、质量较重,对于空间和载荷都十分有限的无人机来说,其应用存在很大的缺陷;三维地图GPRS避障存在地图实时更新代价过大、存储空间要求过大、读取速度较慢等方面的问题,也不是十分适合无人机巡检避障。相对来说,基于输电线路电磁场的避障方案是最为优越的,但是其中大部分是基于直角坐标系,这使得其也存在一些不足之处。
从理论分析推导来看,若输电线路周围空间以直角坐标原点为圆心,那么在上半圆周其电场强度存在很大的波动特性;同样,在电场强度不变的情况下,与之对应的观测点与原点的间距也存在很大的波动性。故现有的基于直角坐标原点的电场强度分布的避障技术无法实现等电场强度线的避障。此外,无人机巡检时的半圆形飞行轨迹实际上是以输电线路周围空间区域中心为圆心,而不是以直角坐标原点为圆心。因此,基于直角坐标系的避障方案的理论基础是存在缺陷的。
本文通过对原有直角坐标系进行极坐标变换,分别研究电场强度随观测点距离、极坐标角和极坐标原点的变化趋势,以单回线路正三角排列方式为例说明坐标变换的主要思想及原理,并分析确定极坐标原点的取值,同时总结得到极坐标原点取值的表达式;以水平排列方式为例研究得到在极坐标系下该线路的近似等电场强度线,同时结合无人机巡检区间避障(分为预警避障和极限避障)的特点,确定无人机巡检的整体避障策略。最后,根据实测的水平排列方式单回线路的电场强度数据,对本文的避障策略进行验证。
1 基于坐标变换的空间电场分布特征
1.1 坐标变换基本思想

图1所示正三角排列方式中,边相即A、B两相离地高度为36m,中间相即C相离地高度为43.5m,避雷线即D1、D2离地高度为51m。利用数学分析软件MATHCAD,基于直角坐标系下两点距离公式和电场二维计算模型[16],以及合成电场强度计算公式,同时以直角坐标原点即图1中的点为圆心,分别以55m、56m和57m为半径,计算得到其上半圆周的电场强度随极坐标角的变化曲线如图2所示。

图1 坐标变换示意图
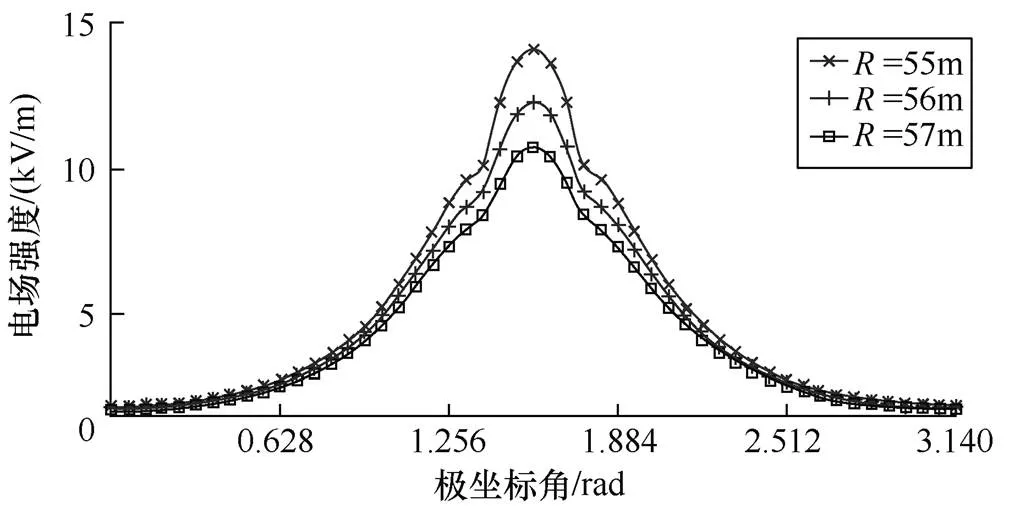
图2 电场强度随极坐标角的变化曲线(直角坐标系)
由图2可知,在半径相同的情况下,其上半圆周电场强度值最小只有1.8kV/m,最大可达到14kV/m,波动区间约为12.2kV/m。即,若以直角坐标系原点为圆心,其上半圆周的电场强度存在很大的波动特性;同样,在电场强度不变的情况下,与之对应的观测点与原点的间距也存在很大的波动性。此外,无人机巡检时的半圆形飞行轨迹实际上是以输电线路周围空间区域中心为圆心,而不是以直角坐标原点为圆心。因此,该避障方案的前提设定是存在缺陷的。
为了解决直角坐标系存在的问题,同时考虑到极坐标系的特点,可将直角坐标系变换为极坐标系。将极坐标系直接建立在原来直角坐标系的基础上,由于正三角排列方式中输电线路周围空间是关于轴对称的,因此极坐标原点必定位于轴;又由于无人机巡检飞行轨迹是围绕着导线,并以输电线路空间区域中心为原点的等距离的上半圆周,因此极坐标原点必定位于直角坐标原点(即图1中的点)和两根避雷线连线与轴的交点(即图1中的点)之间。则两坐标系之间的转换关系为
得到极坐标下输电线路电场强度求解公式为




故合成场强为

也可写成

则可得到电场强度变化率求解函数为


由式(9)可以分析得到在无人机的半圆周飞行轨迹的半径(即与极坐标原点距离)保持不变的情况下,无人机所处位置的电场强度随极坐标角的变化趋势特征,式(10)、式(11)同理。此外,从式(8)可以看出,合成电场强度与极坐标原点的选择即参量有关,下面重点研究极坐标原点参量的取值特性。线路参数参考文献[17-19]。
1.2 极坐标原点的确定

图3 电场强度随极坐标角的变化曲线(r值不变)
从图3可以看出,对于半径保持为40m的上半圆周,当极坐标原点参量以4m为间隔从24.5m增大到36.5m时,电场强度变化趋势表现出显著的差异性。
因此,为了确定准确的极坐标原点参数,使值从23.5m开始以1m为间隔增大到33.5m,仿真计算出电场强度上限相对偏差1和下限相对偏差2随值的变化趋势如图4所示。
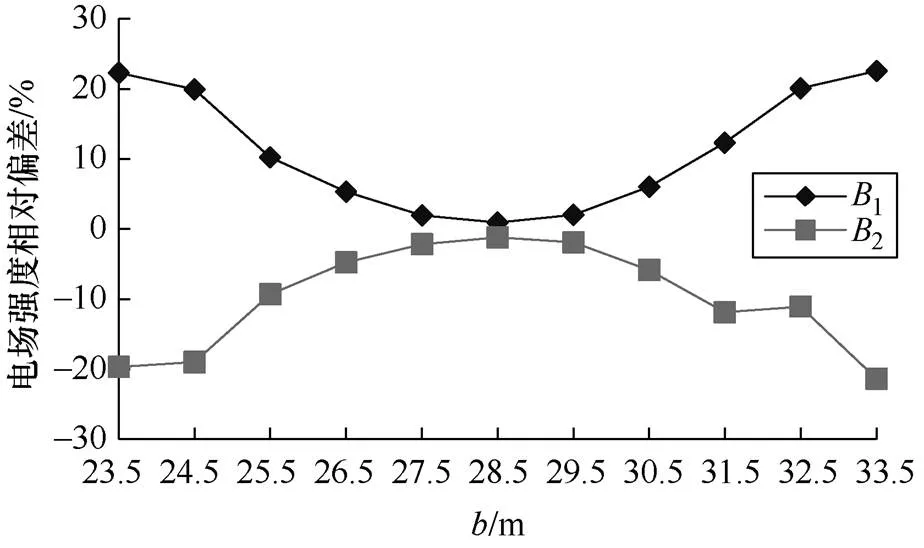
图4 电场强度相对偏差随b值的变化趋势
从图4可以看出,极坐标原点的选择对该极坐标下电场强度沿等距离圆周的变化趋势有很大影响。当极坐标原点为(0, 28.5m)时,电场强度的上下限相对波动范围是最小的,仅为-1.18%~0.94%;此时,不管的取值是增大还是减小,其波动范围都将变大。

图5 电场强度变化率随极坐标角的变化曲线(r值不变)
由图5易得:当值取28.5m时,其对应的电场强度变化率的曲线最平稳(即波动范围是最小的),无论的取值是增大或减少,其波动范围都将增大。故在正三角排列方式下,对应最小电场波动区间的极坐标原点为(0, 28.5m)。
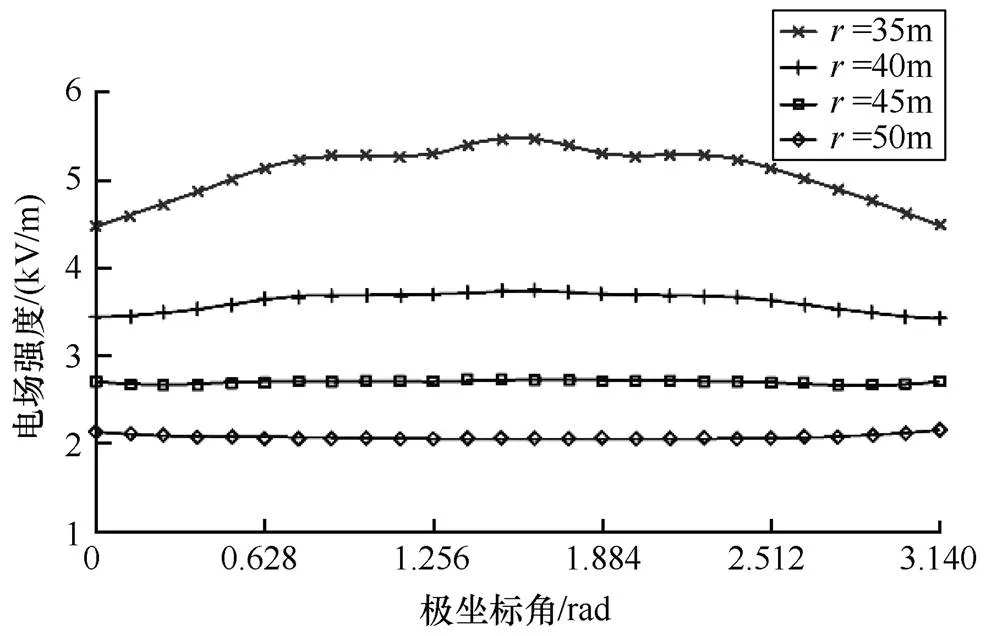
图6 电场强度随极坐标角的变化趋势(b值不变)
1.3 极坐标原点计算表达式
对于单回输电线路,经过大量仿真计算,得到最佳极坐标原点值的计算表达式为

水平排列时

三角排列时
式中:ave为三相导线高度的均值(m);1为离地高度相等的两相导线的高度(m);2为另外一相导线的高度(m);3为避雷线的高度(m)。
同塔双回输电线路(坐标系见图7)具有输电走廊小、土地利用率高、输送容量大等优点,被广泛应用于输电系统中。

图7 同塔双回坐标系示意图
同理,对于同塔双回输电线路,也可推导出最佳极坐标原点值的表达式,即
2 单回线路水平排列方式避障策略
根据导线架设回路数将输电线路架空区域分为单回和同塔双回输电线路。对于单回架空区域,按照导线排列方式又分为正三角、倒三角和水平排列三种。本文以单回线路的水平排列方式为例,研究基于极坐标系的输电线路电场强度平均值的无人机巡检避障策略。线路主要参数见表1。

表1 500kV单回线路水平排列方式的线路主要参数

图8 电场强度随极坐标角变化曲线(b值不变,水平排列)

图9 极坐标半径随极坐标角的变化曲线
同理可得:对应500kV单回输电线路倒三角排列方式,极限避障限值为3.172kV/m,预警避障限值为1.88kV/m;对应500kV单回输电线路正三角排列方式,极限避障限值为2.84kV/m,预警避障限值为1.704kV/m。具体过程同上,由于篇幅有限,此处不再赘述。
3 500kV线路架空区域避障策略验证
通过地面控制站遥控多旋翼无人机搭载电磁场测试仪实际测量了500kV福燕路输电线路架空区域的空间电场分布,获得该输电线路上方空间的电场强度实际数据,并根据实测数据,结合本文的避障方案,计算得到无人机与边相导线直线距离的区间范围,对比区间避障的距离要求,验证本文的避障策略。
使用HI—3604超低频电场强度测量仪,测量距离500kV福燕Ⅰ路99号单回杆塔1/4档距处的线路空间工频电场。排列方式为三相水平排列,ABC三相导线离地高度为18.5m,三相相间距为7.5m,两避雷线间距为18m,避雷线离地高度为26.2m。
3.1 电场实测
选取离地高度分别为20m、23m和25m的测试区域,以5m为间隔测量与边相导线水平间距为5~55m处的电场强度,并多次测量取平均值,电场强度实测数据见表2。

表2 电场强度实测数据
3.2 极限避障验证


由上述实测数据得到的无人机与边相导线的间距范围为20.1~24.5m,而极限避障区间为15~25m。对比可知,以4.629kV/m作为无人机巡检极限避障参量满足极限避障的区间距离要求。
3.3 预警避障验证
同上可得,当=2.524kV/m时,测试点与边相导线的水平间距的近似值:当离地高度为20m时,=26.2m;当离地高度为23m时,=31.1m;当离地高度为25m时,=32.6m。
同上可得,测试点和边相导线的直线距离:当离地高度为20m时,=26.2m;当离地高度为23m时,=31.4m;当离地高度为25m时,=33.2m。
由上述实测数据得到的无人机与边相导线的间距范围为26.2~33.2m,而预警避障区间为25~35m。对比可知,以2.524kV/m作为无人机巡检预警避障参量满足预警避障的区间距离要求。
4 结论
本文研究了基于极坐标系电场强度均值的无人机巡检避障策略。首先以单回线路正三角排列为例说明了坐标变换的主要思想及原理,并研究了极坐标原点的确定,同时总结推导出极坐标原点取值的表达式;然后以水平排列方式为例研究对应的具体避障策略,主要结合预警避障和极限避障的区间避障思想,分别研究这两个避障等级对应的避障参量的确定。再通过对500kV水平排列的单回输电线路空间电场的实测,最终得出测试点与边相导线直线距离的区间范围,并对比区间避障两个等级的区间距离要求,从而验证了本文避障策略的准确性和可行性。但本文只验证了水平排列方式的避障策略,由于倒三角和正三角排列方式缺少实测数据,因此这两种排列方式的避障策略未得到验证,这是本文的不足之处。
虽然目前基于输电线路电磁场的避障策略是比较新颖且实效性较高的方法,但其中基于直角坐标系的避障方案仍存在一定缺陷,所以本文提出了一种基于坐标变换技术的无人机巡检避障方案。该避障技术仍然以输电线路的电场强度为避障参数,但是基于经过坐标转换后的极坐标系下的电场强度均值,因此该技术仍具有前者对硬件要求少、避障精度高、避障效率高等的优点,同时,又弥补了直角坐标系的不足,使避障原理更符合实际情况,提高了避障结果的可信度、精准度和效率。
[1] 朱邵成, 高清维, 卢一相, 等. 基于频率调谐的绝缘子识别与定位[J]. 电工技术学报, 2018, 33(23): 5573-5580.
[2] 杨波, 曹雪虹, 焦良葆, 等. 改进实时目标检测算法的电力巡检鸟巢检测[J]. 电气技术, 2020, 21(5): 21-27, 32.
[3] 曾德智, 陈锐坚, 廖栩荣, 等. 基于四旋翼无人机的电气设备在线监测系统的设计[J]. 电气技术, 2015, 16(10): 50-54.
[4] NILS G, PAUL B, SERGIO M. Obstacle detection and collision avoidance for a UAV with complementary low-cost sensors[J]. IEEE Access, 2015, 3: 599-609.
[5] MENG Guanglei, PAN Haibing. The application of ultrasonic sensor in the obstacle avoidance of quad-rotor UAV[C]//2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), 2016: 976-981.
[6] 陈根华, 黎嘉明, 葛旭文. 用超声波测距的四旋翼无人机三维防撞系统设计[J]. 单片机与嵌入式系统应用, 2016, 16(10): 40-43.
[7] 潘枭, 王伟, 华锡焱, 等. 基于毫米波雷达的多旋翼无人机避障技术研究[J]. 中小企业管理与科技, 2019(21): 170-172.
[8] 李圆圆. 毫米波避障雷达在无人机电力线巡检中的应用研究[D]. 南京: 南京理工大学, 2014.
[9] 林韩, 詹仁俊, 汤明文, 等.一种适用于山区电网巡检的专用无人直升机避障系统及其工作流程[P]. 福建: CN103224026A, 2013-07-31.
[10] 张剑, 王世勇, 陈玺, 等. 基于柱状空间和支持向量机的无人机巡线避障方法[J]. 中国电力, 2015, 48(3): 56-60, 66.
[11] 徐华东, 王世勇, 杨轻, 等. 基于柱状空间和改进A*算法的无人机规避方法[J]. 测控技术, 2014, 33(7): 132-135.
[12] 郑天茹, 王滨海, 王骞, 等. 一种用于无人机巡检带电导线的电场差分避障系统及方法[P]. 山东: CN102736632A, 2012-10-17.
[13] 宋福根. 基于输电线路电场分布特征的无人机巡检避障策略研究[D]. 福州: 福州大学, 2017.
[14] 黄俊璞, 林韩, 宋福根, 等. 输电线路上方无人机巡检避障策略[J]. 电气应用, 2015, 34(23): 32-34.
[15] 董晓虎, 程绳, 吴军, 等. 基于电磁场检测的输电线路无人机避障模块的设计及搭载方法研究[J]. 湖北电力, 2018, 42(5): 39-43.
[16] 许丹, 马星河, 王晨辉, 等. 500kV输电线路电场强度测量与计算分析[J]. 高压电器, 2013(7): 25-28, 34.
[17] 李志军, 陈维江, 张彤, 等. 110kV双回线路格构式复合材料杆塔电气结构设计[J]. 电网技术, 2015, 39(2): 536-542.
[18] 张忠亭. 架空输电线路设计原理[M]. 北京: 中国电力出版社, 2010.
[19] 郭思顺. 架空送电线路设计基础[M]. 北京: 中国电力出版社, 2010.
Obstacle avoidance strategy of unmanned aerial vehicle based on coordinate transformation technology
SONG Fugen LÜ Xuewei
(School of Electrical Engineering and Automation, Fuzhou University, Fuzhou 350000)
Due to the low efficiency and high cost of manual transmission line inspection, it has become a trend to use unmanned aerial vehicle (UAV) for transmission line inspection. Obstacle avoidance is an important part of the inspection work. The average electric field intensity after polar coordinate transformation is taken as the parameter of the obstacle avoidance to achieve high precision obstacle avoidance in this paper. Firstly, the principle of UAV obstacle avoidance technology based on coordinate transformation is explained. Then the single circuit transmission line in horizontal arrangement is taken as an example to study the early warning and ultimate obstacle avoidance strategies of UAV patrol inspection. Finally, the obstacle avoidance strategy is verified by the measured electric field intensity data. The results show that the average electric field intensity scheme based on polar coordinate system can achieve the goal of UAV obstacle avoidance accurately and efficiently.
unmanned aerial vehicle (UAV); obstacle avoidance; transmission lines; electric field intensity; coordinate transformation
2019年福建省中青年教师教育科研项目(JAT190044)
2020-12-02
2020-12-11
宋福根(1982—),男,博士,讲师,主要研究方向为电力系统无人机巡检及高压输电线路空间电场分布研究。
猜你喜欢
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2021年4期)2021-07-22
河北理科教学研究(2020年1期)2020-07-24
现代苏州(2019年16期)2019-09-27
语言与文化论坛(2019年3期)2019-04-13
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
中学数学研究(广东)(2018年23期)2018-03-05
湖北文理学院学报(2017年2期)2017-04-16
燕山大学学报(2015年4期)2015-12-25
