
基于机器视觉技术的实弹报靶系统
2021-07-27 03:48孙海波
电子元器件与信息技术 2021年5期
孙海波
(南京模拟技术研究所,江苏 南京 210016)
0 引言
目前实弹射击训练过程中,常采用人工报靶的方式,这种方式存在繁琐、危险且效率低下等缺点,本系统研制一种基于机器视觉技术的实弹报靶系统,可以实现自动报靶功能,训练人员实弹射击时可以实时显示弹点位置和成绩等信息,极大的提高训练效率[1]。
1 系统设计
基于机器视觉技术的实弹报靶系统由靶标组件、视频图像采集组件、图像处理组件、显示组件、通讯组件组成。报靶系统中摄像头采集靶纸图像,图像处理组件识别靶型区域和弹着点位置信息,然后在射手端实时显示弹点位置和射击成绩。
2 算法原理
实弹报靶的关键是将靶面图像中弹着点提取出来,这就涉及到机器视觉的有关理论和技术[2]。在实际应用中,系统获取的原始图像不是完美的,例如系统获取的原始图像,由于噪声、光照等原因,图像的质量不高,所以需要进行处理,以有利于提取目标信息。实弹识别定位算法流程如图1所示。
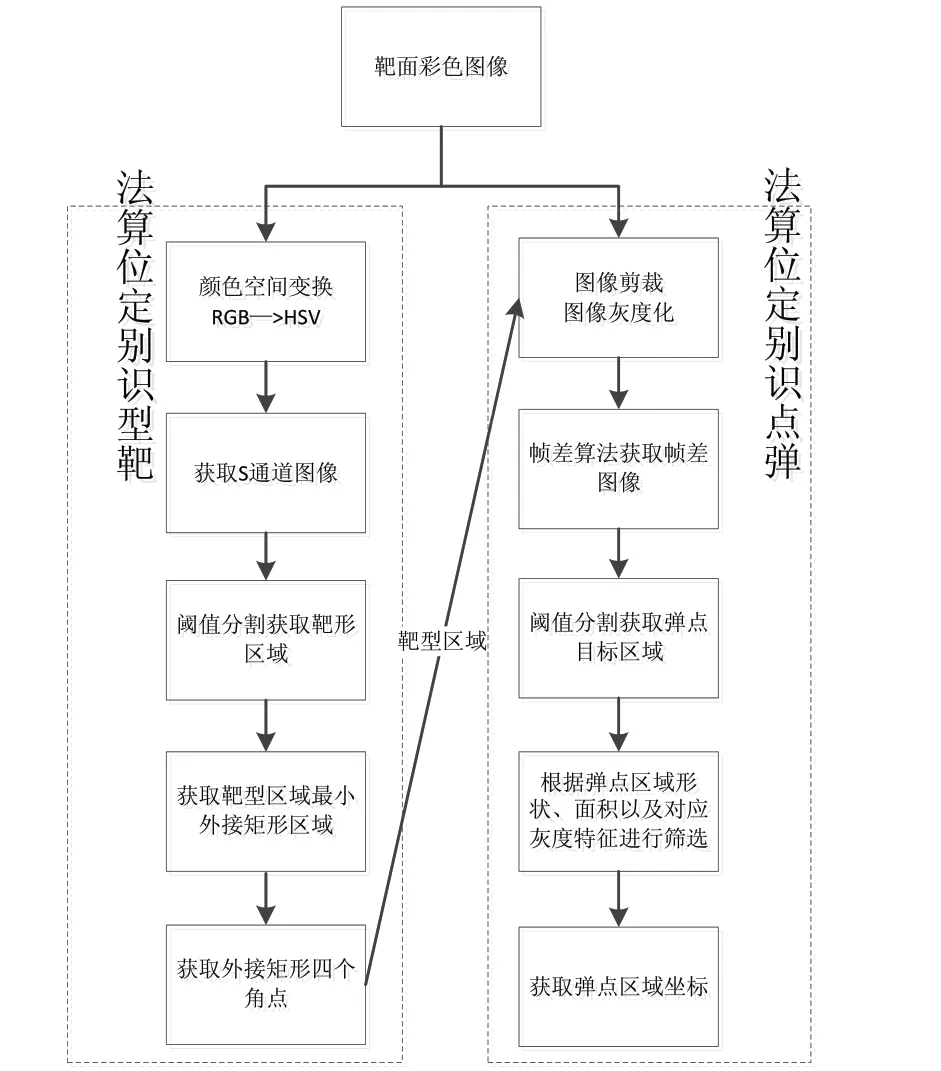
图1 算法流程图
算法流程包括两部分:靶型识别定位和弹点识别定位。靶型识别定位算法:将靶面彩色图进行颜色空间转换,利用自适应阈值分割方法将图像二值化,提取靶型区域,然后求取靶型区域最小外接矩形,获取靶型位置信息。弹点识别定位算法:首先根据靶型区域信息,对图像进行剪裁,采用帧差算法,获取弹着点区域,计算弹点位置信息。
2.1 靶型识别定位算法
当靶面图像上灰度分布不均匀时,靶型的定位会受到比较大的影响,将原有的颜色空间RGB转换到HSV空间,H(色度)S(饱和度)V(明度),选取S通道靶型区域亮度较高有增强作用,可解决照度不均匀问题,如图2所示。
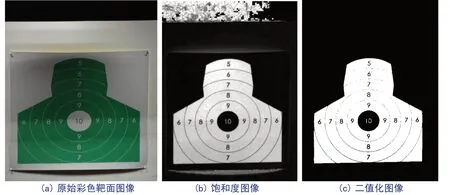
图2 靶型识别示意图
将饱和度图像进行自适应阈值分割,获取靶型二值化图像,然后求取其最小外接矩形即可获取靶型位置信息。
2.2 弹点识别定位算法
2.2.1 图像剪裁
摄像机获取的靶面图像中除了靶型有效区域以外还有周围一些干扰区域,会降低图像处理的速度和正确率。因此可剪裁一部分无关的图像。对于下图中的靶纸图像来说,我们所感兴趣的部分就是正式靶型区域,即图形A、B、C、D所包含的图像区域。靶型识别定位算法可以获取A、B、C、D四个点的坐标,如图3所示。

图3 剪裁示意图
2.2.2 彩色靶图灰度化
图像采集获得的是彩色图像,其包含的数据量巨大,直接处理彩色图像,处理速度很慢,无法实时解算,而且在精度方面与采用灰度图像处理几乎没有区别。因此在本系统中将其转换为灰度图后再进行处理,在提高处理速度的同时保证足够的精确度。利用RGB空间到灰度空间的转换公式获取灰度图像[3]:

式中f(x,y)为(x,y)位置的灰度值B、G、R分别为(x,y)位置像素的蓝、绿、红色对应的彩色信息值。
2.2.3 二值图像
二值图像是指整幅图像画面内仅黑、白二值的图像,在它们之间不存在其他灰度的变化。二值化的方法很多,在实际使用时,必须根据具体的处理对象而定,二值化的关键是要选择合适的阈值来区分对象和背景[4]。
设灰度图像f(x,y),为二值图像为g(x,y),t为阈值,图像二值化的数学描述如公式所示:

因为弹点区域为黑色,与靶面非弹点区域颜色差异较大,所以选用自适应阈值分割法进行二值化处理,根据靶面图像的灰度直方图,在有两个峰值分别对应于靶面图像中的目标与背景存在情况下,取两值中间的峰谷阈值,此方法在图像的目标与背景差别大的场景中效果很好。
2.2.4 帧差算法
帧差算法是将前后采集的两幅靶面图像对应坐标的像素灰度值相减,获取灰度差值组成新的帧差图像。该算法排除掉了新的靶面图像中那些原先已经存在的旧弹着点对识别的干扰,大幅提高自动报靶系统的实时性和准确率[5]。帧差算法公式如下:

其中,glb(x,y)是背景靶面图,glp(x,y)是当前靶面图,glr(x,y)是帧差图。因为弹点区域为黑色,所以每当有新弹点命中靶面时,其在帧差图像中的灰度值较高。
2.2.5 室外大风靶面抖动抖动解决办法
在室外风速比较大的情况下,靶面会发生剧烈的抖动,这时帧差图像上会产生许多的干扰弹点,容易产生多报现象,具体分析情况如下,当靶面上原有弹点在图像抖动时,会在帧差图像上产生生弹点“虚影”,如图4所示。

图4 虚影弹点和实际弹点比较图
A为靶面上原有弹点,因晃动产生的虚影弹点,B为晃动时新增实际弹点,A和B的区别是,在A区域一般包两块区域,面积和形状相近,但是其在帧差图像中的平均灰度为一正、一负,两个区域总体平均灰度趋近与0;而B区域只有一块平均灰度为正值得区域,所以可以依靠这个区别,来识别出在靶面抖动时新增实际弹点和干扰虚影弹点。
3 结论
本项目研制的基于机器视觉技术的实弹报靶系统,系统将报靶设备固定于靶标前端,实时采集靶面图像,当射击时子弹击中靶面,系统实时分析弹着点图像,并将靶型位置和弹点位置信息解算出来实现实时报靶功能。研制靶型定位算法:靶面图像光照不均匀影像靶型识别,将原颜色空间RGB转换到HSV空间,并选取S(饱和度)颜色通道,靶型区域亮度较高有增强作用,可提高靶型定位识别的准确性。研制弹点识别算法:采用自适应阈值分割算法和帧差算法识别弹点;并研制抗大风引起的靶面图像抖动的弹点识别算法,提高报靶的稳定性。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
政工学刊(2022年1期)2022-01-21
军事文摘(2021年15期)2021-08-11
天津医科大学学报(2021年1期)2021-01-26
广东造船(2020年1期)2020-05-03
西安交通大学学报(2019年9期)2019-09-10
兵器知识(2018年4期)2018-04-18
兵器知识(2018年4期)2018-04-18
西安交通大学学报(2018年1期)2018-01-12
自动化学报(2017年5期)2017-05-14
