
摇架三种典型握持机构的性能比较
2021-07-27 03:21:52俞宏图
纺织器材 2021年3期
俞宏图
(a.湖南文理学院,湖南 常德 415000;b.常德圆心机械有限公司,湖南 常德 415200)
0 引言
摇架是环锭细纱机、粗纱机上纺纱牵伸系统的核心专件,其基本作用是对牵伸罗拉加压并对上罗拉胶辊、上销握持定位[1],因此,加压性能及对上罗拉胶辊的握持性能成为摇架两个重要技术性能指标[2]。笔者对几种摇架典型上罗拉胶辊握持机构进行分析比较,以期为摇架制造企业新产品研发提供参考、为用户对摇架选型提供依据。
1 摇架握持机构的作用及性能要求
1.1 摇架上罗拉胶辊握持机构的主要作用
摇架上罗拉胶辊握持机构的作用为:① 保证上罗拉胶辊轴线与对应下罗拉轴线的平行度;② 保证同一套摇架所对应的两锭间加压均衡;③ 作为上罗拉胶辊及上销的载体,保证在摇架掀起过程中及维持掀起状态下上罗拉胶辊不会从摇架握持爪中脱落,以方便挡车及清洁。
1.2 摇架上罗拉握持机构的性能要求
从摇架上罗拉握持机构的作用及工作形式看,其性能要求有:① 三线平行度优良且稳定;② 满足两锭间均衡分压要求;③ 对上罗拉胶辊握持可靠,无上罗拉胶辊意外脱落;④ 上罗拉胶辊装卸轻松;⑤ 为上罗拉胶辊提供良好工作条件;⑥ 使用寿命长。
2 摇架握持机构的分类
根据摇架上罗拉胶辊握持爪对上罗拉胶辊轴握持宽度,可将上罗拉胶辊握持机构分为宽握持和窄握持。根据现有摇架对上罗拉胶辊的几种典型握持机构及其对上罗拉胶辊轴的衔夹方式,又将其分为夹簧握持型、塑胶块握持型和自锁握持型。
2.1 夹簧握持型
夹簧握持是目前应用最广的握持型式,YJ2系列摇架、YJ4系列摇架、PK2025系列摇架、QYJ系列整体气囊加压摇架都采用此型式,其结构特点:由摇架加压鞍的上罗拉胶辊握持卡口限制上罗拉胶辊轴在平行于牵伸平面方向的摆动,即保证三线平行,由夹簧衔夹上罗拉胶辊轴,使上罗拉胶辊当摇架掀起时随摇架上升、不脱落,而装卸上罗拉胶辊时要克服夹簧的弹力。图1、图2分别为YJ2系列、YJ4系列摇架的夹簧握持型上罗拉胶辊握持机构。
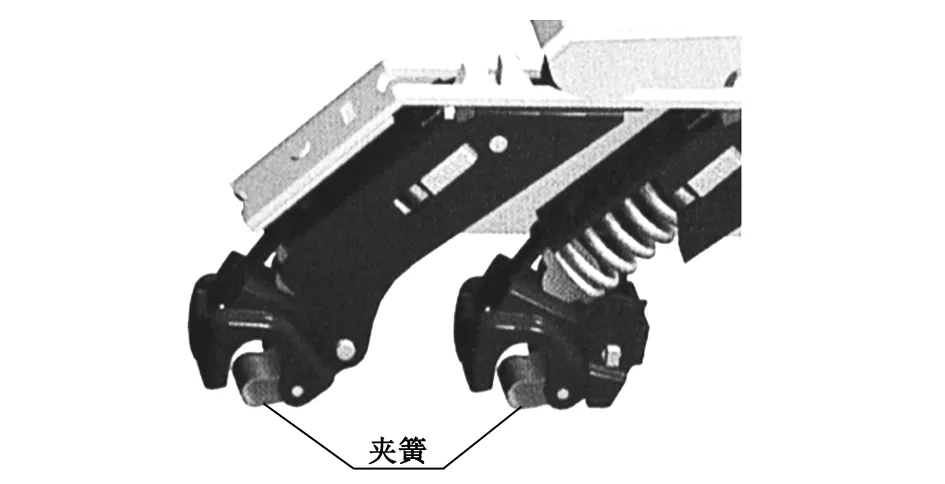
图2 YJ4系列摇架的夹簧握持型机构
2.2 塑胶块握持型
常德纺机在YJ200系列摇架、YJ40系列摇架上率先采用了塑胶块握持型式,其结构特点:由摇架加压鞍的上罗拉胶辊握持卡口限制上罗拉胶辊轴在平行于牵伸平面方向的摆动[3],即保证三线平行;由塑胶块衔夹上罗拉胶辊轴,使上罗拉胶辊在摇架掀起时随摇架上升、不脱落,上罗拉胶辊的装卸都要克服塑胶翅片的变形力。图3、图4分别为YJ200系列、YJ40系列摇架塑胶块握持型上罗拉胶辊握持机构。
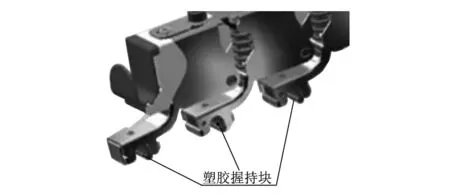
图3 YJ200系列摇架的塑胶块握持型机构

图4 YJ40系列摇架塑胶块握持型机构
2.3 自锁握持型
湖南晟凯瑞机械有限公司制造的SCP2-150型气动加压摇架(见图5所示)、常德圆心机械有限公司制造的YJ400系列粗纱摇架(见图6所示),创新地采用了自锁型握持机构,其机构特点:由摇架加压鞍的上罗拉胶辊握持卡口限制上罗拉胶辊轴在平行于牵伸平面方向的摆动,即保证三线平行;由1个自锁块衔夹上罗拉胶辊轴,摇架工作时的自锁块与上罗拉胶辊轴并不接触,而当摇架掀起时自锁块的凸出部位处于握持卡口内、阻止上罗拉胶辊下落[4],而上罗拉胶辊的重力及惯性力作用只会使自锁块处于自锁位置,只有用手主动解锁自锁块时上罗拉胶辊才会在自身重力作用下掉出握持卡口;当装入上罗拉胶辊时,只要使上罗拉胶辊轴向上轻轻顶动自锁块的凸出部分,自锁块就会转动、使突出部分让开,而当上罗拉胶辊轴进入到安装位置时自锁块即在扭簧作用力下复位并阻止胶辊下落,从而实现对上罗拉胶辊的可靠握持及轻松装卸。
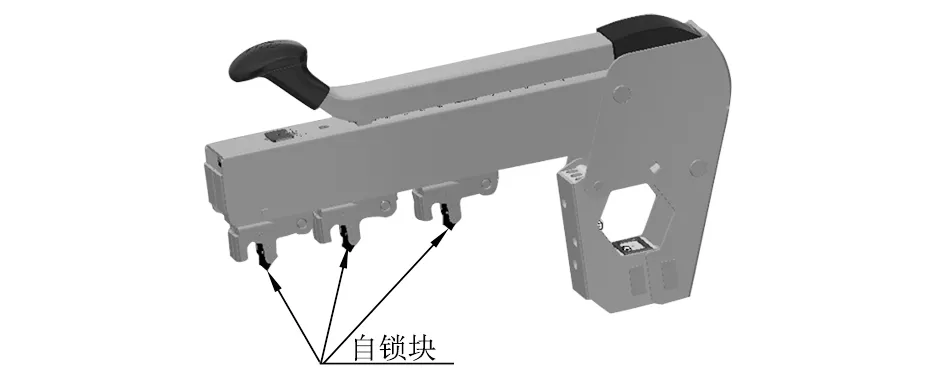
图5 SCP2-150型气动加压摇架自锁握持型机构
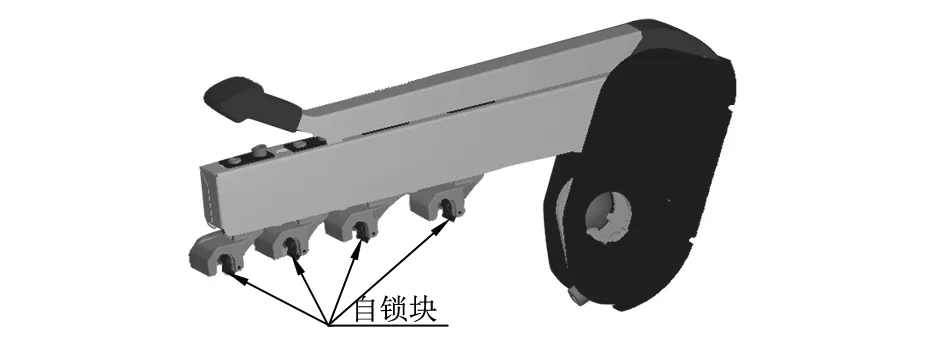
图6 YJ400-190×4型粗纱摇架自锁握持型机构
3 握持机构的三线平行度对比
三线平行度是衡量摇架质量的重要指标之一,直接关系到纺纱牵伸质量[5],各种上罗拉胶辊握持机构对三线平行度的影响水平见表1。
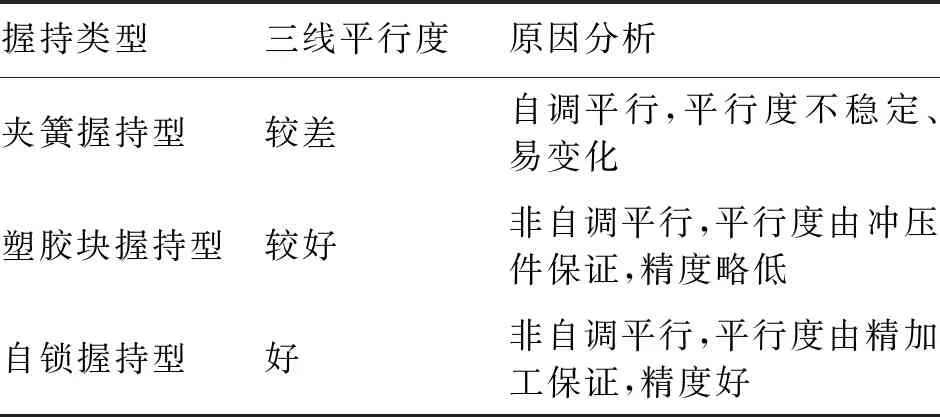
表1 摇架上罗拉胶辊握持机构的三线平行度
4 握持机构对上罗拉胶辊两锭间压力平衡的影响
每套摇架要对两锭实施加压,而通常所指的摇架压力是这两锭加压的合力,如果同一套摇架的两锭间压力不平衡,即使摇架间的压力一致仍会出现明显锭差,所以控制同一套摇架两锭间的压力平衡是优质摇架的关键指标,而摇架的这一指标与其上罗拉胶辊握持机构有着密切联系。
4.1 夹簧握持型机构
图7 所示是采用夹簧握持机构时上罗拉胶辊受力情况,其中两锭对应胶辊纤维握持钳口的加压力分别是Fd1,Fd2;Fy1,Fy2分别是摇架加压爪两侧壁对上罗拉胶辊轴的压力;因为在工作状态下夹簧始终与上罗拉胶辊轴保持接触并相互作用,可近似地认为是均布载荷,记为Fj。要使Fd1=Fd2,则须使Fy1=Fy2,且Fj为理想的均布载荷。实际上因加压爪加工精度以及上罗拉对下罗拉平行度的影响,不可能做到Fy1=Fy2,Fj也不是理想的均布载荷,实际情况下Fd1≠Fd2,即两锭间的压力并不平衡。
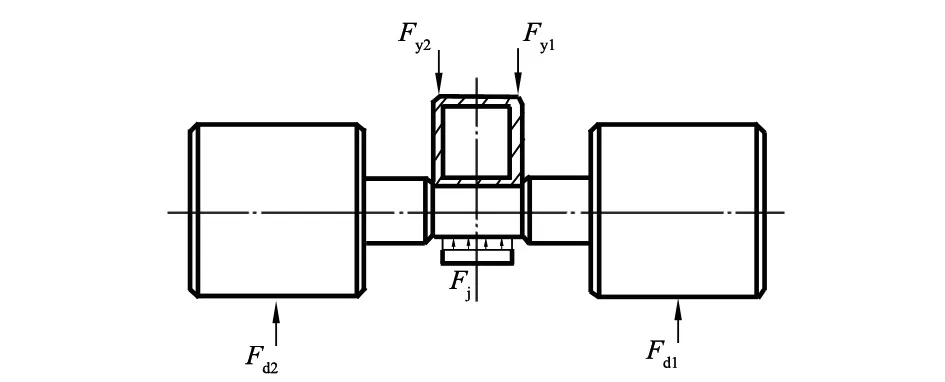
图7 采用夹簧握持机构的胶辊受力情况
4.2 塑胶块握持型机构
图8所示是采用塑胶块握持时上罗拉胶辊机构,图9所示是其加压时胶辊受力情况。在上罗拉轴的中点为塑胶握持块设置了1个加压凸点,使摇架对胶辊的加压不再是作用在两点上、而是集中于一点,且该加压点为两锭加压力Fd1,Fd2作用点连线的中点;如果没有其他力的作用则此机构可以保证把摇架加压力Fy均衡地分配到Fd1和Fd2,但是,因工作状态下的塑胶握持块与上罗拉胶辊轴始终保持接触,故仍然存在近似均布载荷Fj而会影响Fd1,Fd2的均衡——尽管这种影响很小,然而理论上仍然存在。
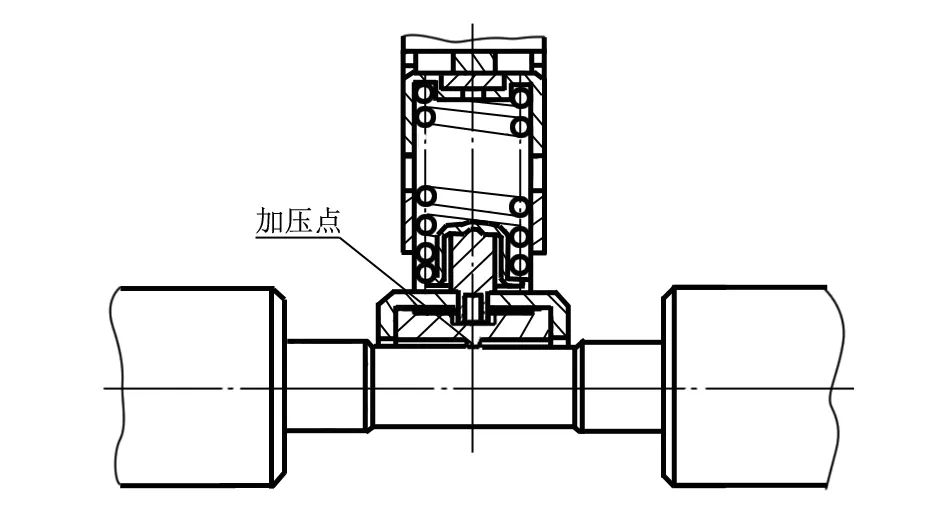
图8 塑胶块握持上罗拉胶辊机构
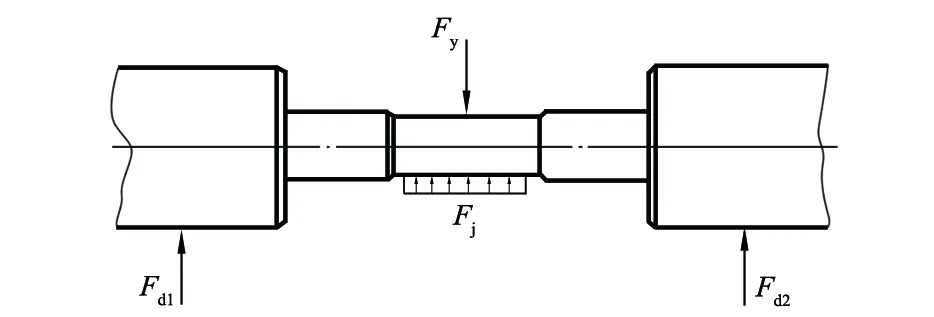
图9 采用塑胶块握持机构的胶辊受力情况
4.3 自锁握持型机构
图10所示是采用自锁握持型机构时上罗拉胶辊受力情况,同样是在上罗拉胶辊轴中点设置为加压凸点,使摇架对胶辊的加压力Fy集中于两锭的加压力Fd1,Fd2在对称中心点上,以保证两胶辊分压均衡,而且在工作状态下的自锁块与上罗拉胶辊轴无接触,故不存在其他影响分压均衡性的因素,从而分压均衡。
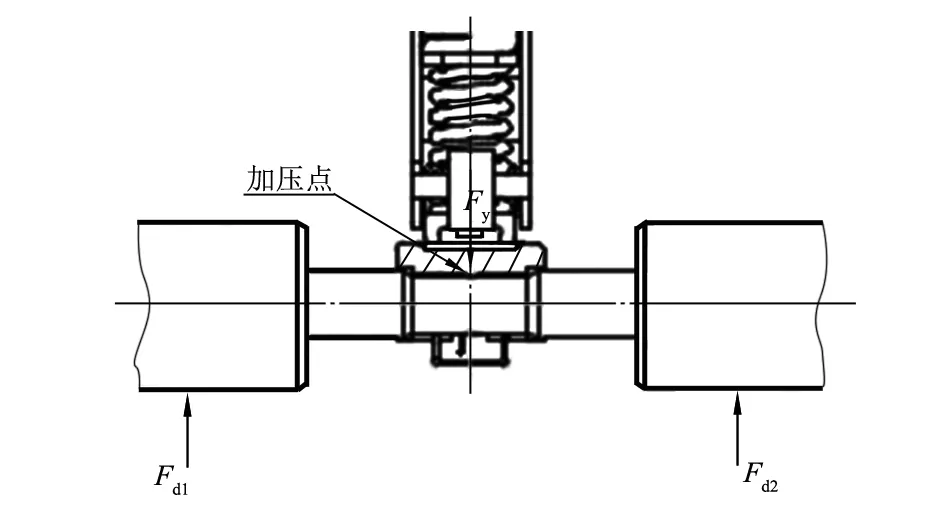
图10 采用自锁握持机构的胶辊受力情况
从几种握持机构可知,对上罗拉胶辊加压改为集中在一点是明显进步,消除夹簧或握持块对上罗拉胶辊的作用力有利于锭间压力的平衡,特别是对集聚纺纱用胶辊更有利于对阻捻胶辊压力的控制。
5 握持机构对上罗拉胶辊握持的可靠性
5.1 夹簧握持型机构
夹簧握持型机构的可靠性取决于夹簧变形力,因夹簧制造误差及其疲劳导致握持力不足易使上罗拉胶辊意外掉落,特别是在掀起摇架冲击过大时极易出现上罗拉胶辊掉落的问题。
5.2 塑胶块握持型机构
塑胶块握持型机构的可靠性取决于塑胶翅片的变形力,由于塑料容易发生塑性变形及老化导致握持力降低,故极易出现上罗拉胶辊意外掉落以及塑胶块失效的问题。
5.3 自锁握持型机构
自锁握持型机构只要扭簧不失效,就不会产生上罗拉胶辊意外掉落的问题,且扭簧耐受冲击能力强,其寿命一般不少于10万次,能够承受更大的上罗拉胶辊或集聚纺胶辊的重力。
在使用集聚纺胶辊时,因夹簧握持或塑胶块握持的握持力不足发生的掉落问题也普遍存在。
6 握持机构对上罗拉胶辊装卸的便利性
6.1 夹簧握持型机构
夹簧握持型机构对上罗拉胶辊的装入及卸下都要克服夹簧的变形力,还不支持单手操作,而且上罗拉胶辊装卸的便利性与握持的可靠性互相矛盾,应以可靠性优先,所以装卸的便利性就要差一些。
6.2 塑胶块握持型机构
塑胶块握持型机构对上罗拉胶辊装卸需要克服塑胶翅片的变形力,同样上罗拉胶辊装卸的便利性与握持的可靠性对翅片变形力的要求互为矛盾,但是,由于塑胶握持块支持单手操作装卸上罗拉胶辊,因而比夹簧握持更便捷。
6.3 自锁握持型机构
自锁握持型机构对上罗拉胶辊装卸需要克服扭簧的扭力,而握持的可靠性是靠自锁机构,从而克服了前两种机构对变形力要求的矛盾,同时也很好地支持单手操作,因此装卸上罗拉胶辊时非常便捷。
7 握持机构对上罗拉胶辊轴承性能的影响
根据上罗拉胶辊的工作状态,胶辊轴承外圈受力顺次作用在套圈滚道的整个圆周上,属于循环载荷;内圈受力始终不变地作用在滚道下部,属于局部载荷,易造成内圈局部磨损,因此期望内圈(即上罗拉胶辊轴)能在振动、冲击、摩擦力矩的作用下缓慢转位,以充分利用全部滚道、使磨损均匀,从而延长上罗拉胶辊轴承使用寿命[6]。在工作状态下,因摇架握持的夹簧和塑胶块都紧紧抱住胶辊轴而使胶辊轴转位难度增加。自锁握持的自锁块不接触上罗拉胶辊轴、胶辊轴的转位相对更容易,更有利于提高上罗拉胶辊轴承的使用寿命。
8 结语
根据上述分析,对摇架3种典型握持机构的性能对比情况归纳见表2。
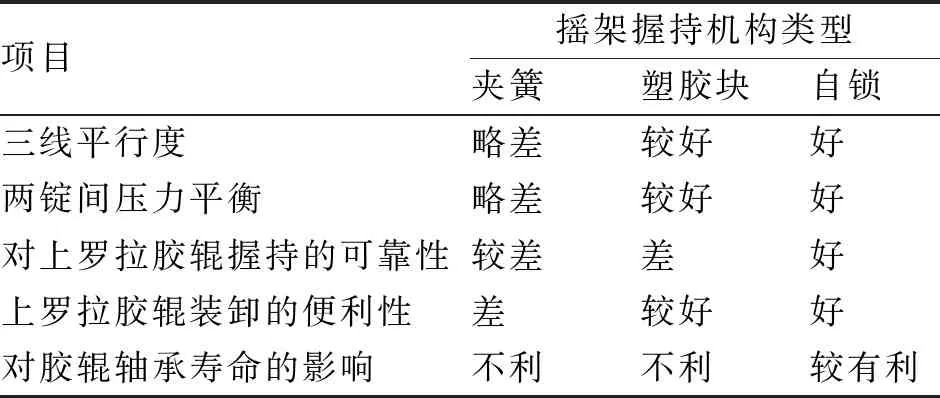
表2 各类摇架握持机构性能对比
摇架的三种典型握持机构反映了摇架在握持上罗拉胶辊轴的演变与技术进步[7],从表2可知,摇架对上罗拉胶辊轴的三种典型握持机构中,自锁型握持机构是最好的一种。希望这个结论能进一步促进摇架新产品的研发,也希望能让用户在相关摇架选型时对上罗拉胶辊轴握持机构引起关注,做出最佳的选型决策。
猜你喜欢
纺织器材(2022年4期)2022-08-18 14:05:34
纺织器材(2022年4期)2022-08-18 14:05:34
哈尔滨轴承(2021年1期)2021-07-21 05:43:12
水泥技术(2020年3期)2020-06-06 09:39:14
ELLE世界时装之苑(2020年4期)2020-04-29 08:18:57
农产品加工(2019年22期)2019-12-04 08:07:44
作文评点报·低幼版(2016年2期)2016-05-30 10:48:04
纺织器材(2015年5期)2015-12-19 06:38:34
纺织器材(2015年4期)2015-12-19 06:37:30
广西民族大学学报(自然科学版)(2015年3期)2015-12-07 00:56:07
