
用于拖曳阵的多连杆稳定翼锁紧装置设计
2021-07-26 05:54孙昕煜苏石飞郝浩琦范进良
声学与电子工程 2021年2期
孙昕煜 苏石飞 郝浩琦 范进良
(第七一五研究所,杭州,310023)
拖曳式发射阵是将发射声基阵安装在导流拖体内,拖体通过优良的水动力设计可大大降低拖曳阵水下拖曳时阻力和流噪声,有效提高拖曳阵稳定性和信噪比[1,2]。稳定翼为拖体拖曳时提供升力,调整发射阵姿态,工作时使声波尽量在可靠声道内传播,进而提升发射阵探测距离[3,4]。拖曳阵使用时依靠船上的绞车及拖缆进行释放和回收[5],拖体在甲板存储时由于受存储空间限制,需要将拖体稳定翼放倒一定角度,降低拖体高度。使用时,在拖体释放过程中需在释放口处将稳定翼扶至竖直状态,稳定翼与拖体主体可靠固定后再放入水中进行拖曳工作。由于释放口处一侧面向海水,需要在拖体单侧操作,将稳定翼扶直并与拖体主体两侧锁紧后,再释放拖体,因此需要设计一种方便可靠的锁紧装置,在拖体释放过程中单侧操作即可实现稳定翼与拖体主体双侧快速锁紧固定,在拖体回收过程实现稳定翼与拖体的快速脱离,并将稳定翼翻倒至一定角度。根据这一工程实际需求,本文设计了一种多连杆稳定翼锁紧装置。
1 锁紧装置组成及工作原理
连杆机构是一种常见的传动机构,组成为平面低副,面接触,耐磨损,可实现力的远距离传导,制造简便,易于获得较高的制造精度,通过改变连杆长度可实现从动件预期位移[6]。锁紧装置由安装壳体、多连杆机构、限位块、把手等组成,如图1 所示。安装壳体固定在拖体主体上,内置多连杆机构,机构中心铰接在安装壳体上,多连杆机构两端分别铰接一个带锥形头的锁紧销,嵌入安装壳体,可随机构在壳体轨道内进行直线往复运动,多连杆机构一侧两连杆铰接处安装一个把手,把手手柄可绕把手横轴转动,在安装壳体适当位置加工把手存放槽,两个限位块分别嵌入稳定翼两侧。多连杆机构结构简图如图2 所示。
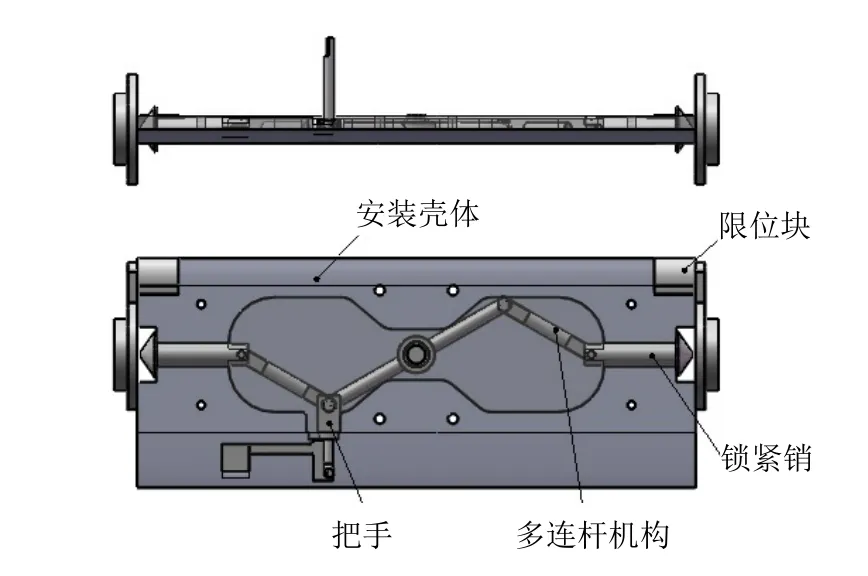
图1 锁紧装置组成
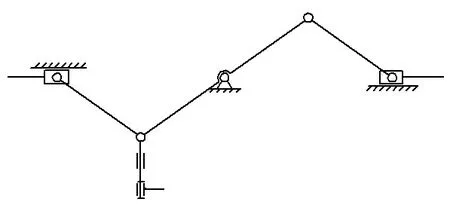
图2 多连杆机构结构简图
机构中共有7 个构件,9 个运动副(均为转动副或滑动副等低副),由此可计算机构自由度为

式中,n为运动构件数量,P为低副数量。
推动把手可实现两个锁紧销的水平移动,当锁紧销的锥形头顶到挡块后,旋转把手手柄使手柄置于存放槽内,可同时限制锁紧销的水平移动和把手转动。此时机构自由度为零,装置锁死,锁紧销的锥形头顶住挡块的锥形槽可限制稳定翼的转动,实现稳定翼与拖体主体的固定。当把手手柄置于存放槽后,多连杆机构完全隐匿在安装壳体内。壳体外形设计为流线型,可减小水下拖曳时锁紧装置带来的阻力,并能增强稳定翼对拖体姿态的稳定作用。
2 锁紧装置功能实现
限位块安装需保证稳定翼扶正后限位块锥形槽与锁紧销同轴。拖体释放时由一名操作人员将稳定翼扶正,限位块上的挡块与安装壳体上的缺口完全契合,实现稳定翼定位;然后由另一名操作人员向前推动把手,直到锁紧销的锥形头完全嵌入限位块上的锥形槽内;最后扳动把手手柄,将手柄置于壳体上的存放槽内,即可实现稳定翼与拖体主体的锁紧。回收时,由一名操作人员扶住稳定翼,另一名操作人员将手柄从存放槽内掰出,往后拉把手,锥形头与限位块完全脱离后将稳定翼放倒,然后进行拖体回收存储操作。稳定翼的翻倒和扶正状态示意如图3 所示。
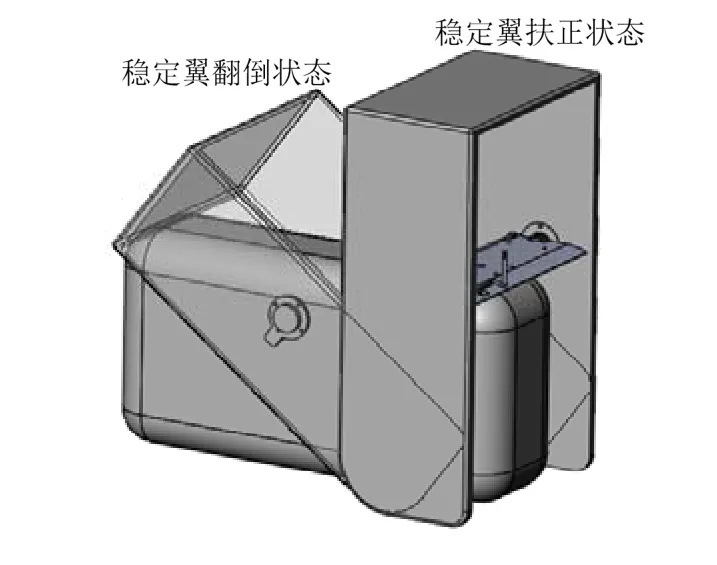
图3 稳定翼翻倒和扶正状态示意
限位块安装时,在稳定翼上的位置不可避免的会出现偏差,这样会导致其中一侧锁紧销的锥形头与限位块完全接触后而另一侧的锥形头与限位块还存在间隙,不能实现两侧同时有效锁紧,通过在限位块锥形槽内侧硫化一层橡胶,可顺利解决这一问题。两侧锥形头均通过压缩橡胶实现与限位块锥形槽的紧密配合。
3 连杆长度计算
3.1 连杆长度最大值计算
多连杆机构在安装壳体内运动时不能超出壳体宽度方向,且需保证锥形头能与限位块内的橡胶完全贴合,据此可确定连杆长度范围。
为保证运动时多连杆机构不超出壳体宽度,要求节点A处的纵坐标极限值为Y0,此时锁紧装置与稳定翼完全分离,锁紧销锥形头完全收入安装壳体缺口内,分离状态结构示意图如图4 所示。
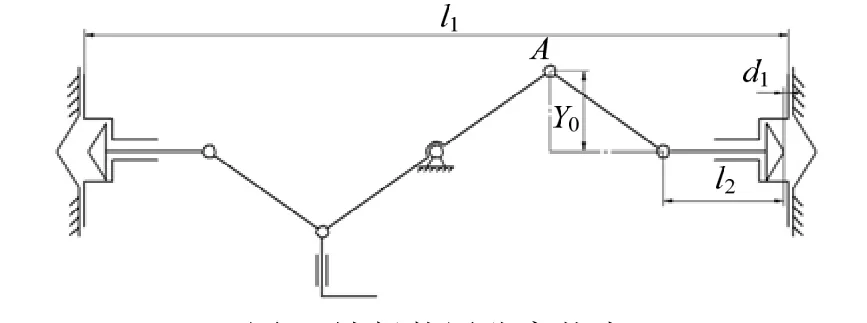
图4 锁紧装置分离状态
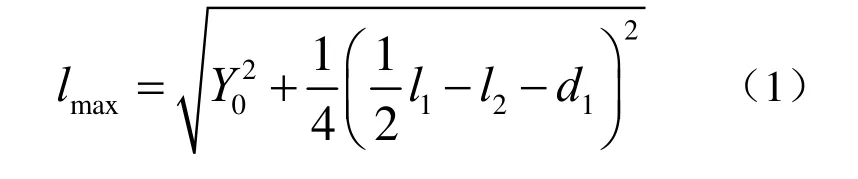
假设安装壳体长度为l1,锁紧销长度为l2,锁紧销锥尖缩进壳体d1,由此算出连杆最大长度为
3.2 连杆长度最小值计算
锥形头与限位块内的橡胶完全贴合,实现锁紧,锁紧状态结构简图如图5 所示。此时锥尖突出安装壳体d2,连杆与水平方向夹角为θ,极限状态下相邻两连杆在水平方向重合,θ为零,此时连杆的长度为
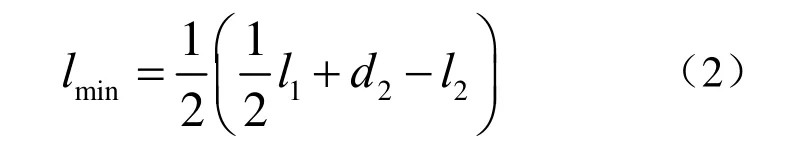
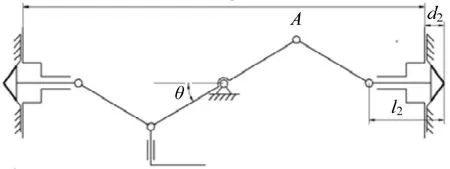
图5 锁紧装置锁紧状态
4 推力计算
锁紧销是通过压缩限位块中的橡胶实现紧密配合的,橡胶需压缩到一定量才能使把手可旋转放入存储槽内。橡胶压缩是通过推动把手实现的,需要一定的推力才能实现橡胶压缩到位,然后将把手放入存储槽内。推力与橡胶厚度、橡胶压缩量、连杆尺寸等相关。
多连杆机构受外力简图如图6 所示。多连杆机构是关于O点的旋转对称,推动把手两侧锁紧销位移量相同,橡胶压缩量相同,橡胶对锁紧销产生的弹力相同,即

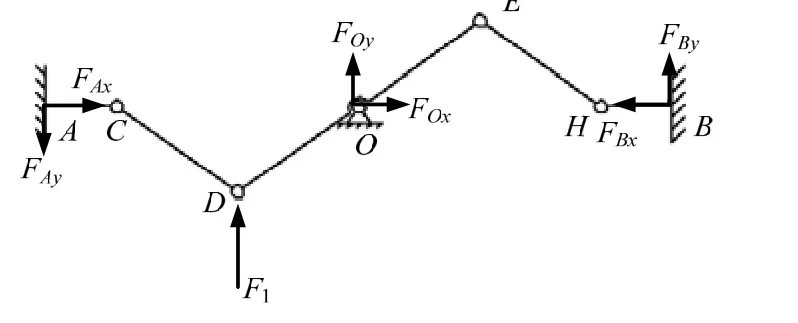
图6 机构受外力简图
CD杆和EH杆均为二力杆,连杆两端合力均沿连杆方向,由作用力和反作用力可得出两锁紧销受力简图分别如图7 和8 所示。由AC和BH受力平衡可推出:

由O点处力矩平衡可得:
由此得出推力:

由上式可看出在安装壳体和锁紧销长度一定的情况下,θ越小,推力越小,锁紧时越省力。在不干涉的情况下,减小连杆长度,进而减小θ,提高可操作性,但应避免θ为0 情况,否则会导致连杆共线,出现卡死现象。
5 结束语
多连杆稳定翼锁紧装置已完成样件制作,并安装于拖曳阵,通过多次收放验证,可有效实现拖体尾翼的单侧扶正锁紧和解锁放倒,水下拖曳时稳定翼牢固固定,发射阵工作时稳定翼无明显抖动。
多连杆稳定翼锁紧装置是根据工程中实际需求而设计的。通过边界条件可推出多连杆机构连杆的尺寸范围,通过计算推力进而改进结构可实现使用尽可能小的推力实现机构锁死,增加可操作性。使用多连杆锁紧装置可快速实现稳定翼与拖体主体的锁紧和脱离,具有一定的工程使用价值。
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
汽车实用技术(2022年14期)2022-07-30
口腔医学(2021年10期)2021-12-02
昆明医科大学学报(2021年1期)2021-02-07
农家之友(2020年1期)2020-05-19
哈尔滨轴承(2020年4期)2020-03-17
猪业科学(2018年4期)2018-05-19
三联生活周刊(2017年37期)2017-09-11
科技创新与品牌(2017年3期)2017-04-27
中华老年口腔医学杂志(2016年5期)2016-03-01
