
前视声呐的多普勒波束锐化技术研究
2021-07-26 05:54陈志鹏陈宇航吴浩然
声学与电子工程 2021年2期
陈志鹏 陈宇航 吴浩然
(1.海装沈阳局驻葫芦岛地区军事代表室,葫芦岛,125003)
(2.海军工程大学电子工程学院,武汉,430033)
无论在近场还是远场,前视声呐的方位分辨率均受限于发射声波的波长和阵列长度的比值[1]。为了提高方位分辨率,前视声呐可以选择更高的工作频率或者增加阵的长度。但是工作频率越高,信号衰减就越快,从而减小探测的范围;而增加阵长既提升了成本又使声呐结构更加复杂。虽然双发射阵模型容易实现,但对于方位分辨率的提高也是有限的。本文提出通过多个脉冲信号之间的相干积累,利用多普勒波束锐化(Doppler Beam Sharpening,DBS)技术[2-3],将同一波束内的回波信号划分为不同方位的一组波束,不需要对阵列和设备进行任何的改动,大大降低了成本。
1 DBS 成像方法研究
1.1 多普勒频率模型

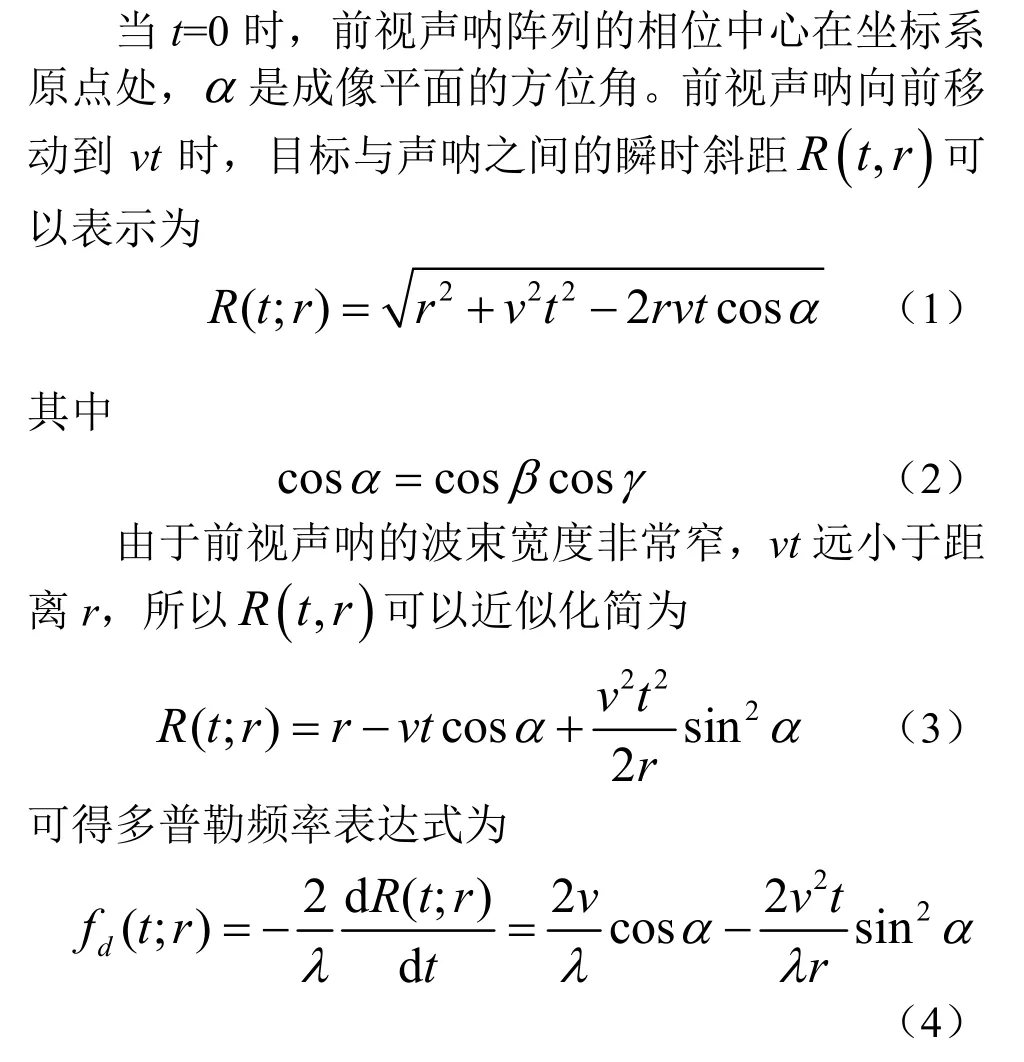
式中,λ表示声波波长。从上式可以看出,多普勒频率可以写成两部分:一部分与时间无关,一部分与时间成线性相关。根据图1(b),目标回波信号的多普勒中心频率为
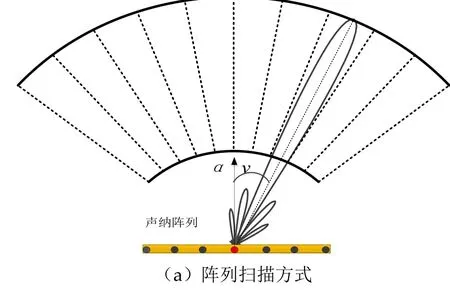

图1 前视声呐

多普勒频率不同均由锥角α的差异所致,有

因此,方位角分辨率与多普勒频率分辨率之间的关系为

式中,fρ是相干积累时间T的倒数,所以方位角分辨率可以写作

根据式(4),目标回波信号的多普勒带宽为
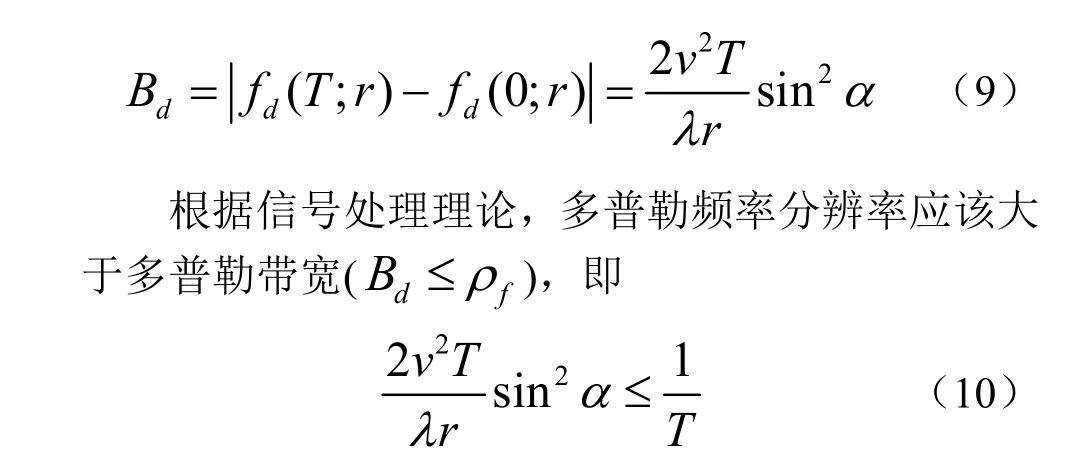
然后可以得到最大相干积累时间为

将式(11)带入式(8)可得距离r处的最大方位分辨率为

根据以上分析我们可以发现,DBS 成像与合成孔径成像[9]最大的区别在于前者属于非聚焦合成孔径成像,只利用多普勒频率之间的差异来区分目标,因此其分辨率不如聚焦合成孔径成像。且相对于聚焦合成孔径成像复杂的信号处理过程,DBS 的实现过程要简单的多。
1.2 DBS 信号的获取
对一个脉冲的回波信号进行波束形成之后,我们可以得到一个包含目标方位角和距离信息的二维图像。如果将相同的操作应用于每个脉冲的回波信号,那么就可以得到M个二维图像,如图2(a)所示。假设图2(a)中的波束需要通过使用DBS技术来划分为几个子波束,我们从每个脉冲的二维图像中提取一组与同一方位角α对应的距离维度信号,即可组成一个DBS 二维信号,如图2(b)所示。但是图2(b)中脉冲空间长度应该限制为Ns,这样来自脉冲之间相干积累的多普勒频率分辨率就大于目标的多普勒带宽。假设前视声呐的脉冲重复间隔是PRI,Ns可以写成
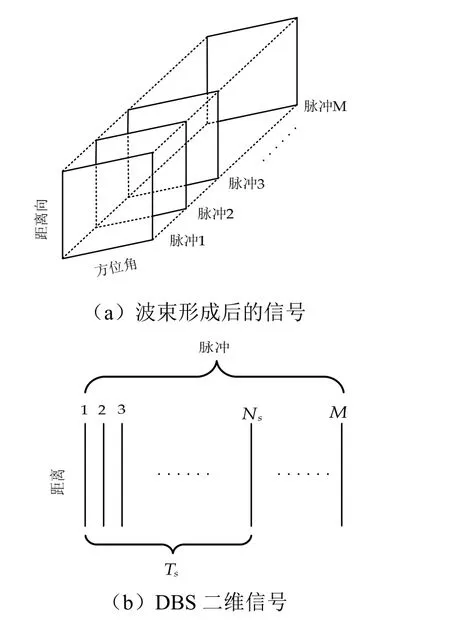
图2 DBS 信号的获取

式中,ceil( ·) 表示向下取整。
1.3 距离徙动校正

可以看出,ΔR(t;r)独立于距离r,可认为是一个和距离无关的常数项。根据傅里叶变换的性质,在时域对一个回波信号进行常数时延搬移的操作相当于在距离频域根据 ΔR(t;r)找到对应的距离频率的线性函数,并与信号进行相位相乘从而实现RCMC。
1.4 子图像拼接
为了获取连续的图像,需要将经过DBS 处理得到良好点目标的子图像拼接到一起。图3 是一个拼接三个子图像的示例。为了说明局部目标点的幅度变化,目标被假定为强度相等且不考虑波束宽度内指向性的影响。
图3(a)中,部分聚焦的目标点A和C达不到完全聚焦的目标点B的分辨率;图3(b)中,部分聚焦的目标点为B、D,C为完全聚焦的目标点;图3(c)中,目标C和E聚焦不完全,目标D为完全聚焦。进行子图像拼接时,聚焦效果不好的点被舍弃,从前一幅子图像聚焦良好的点开始拼接到下一幅子图像聚焦良好的点结束,图3(d)是图像拼接的结果。与子图像相比,图(d)中目标强度大小相等,与拼接之前相比有明显区别。

图3 子图像拼接成连续图像示意图
1.5 DBS 成像步骤
基于上面的分析,图4 给出了本方法的详细流程框图,具体步骤为:
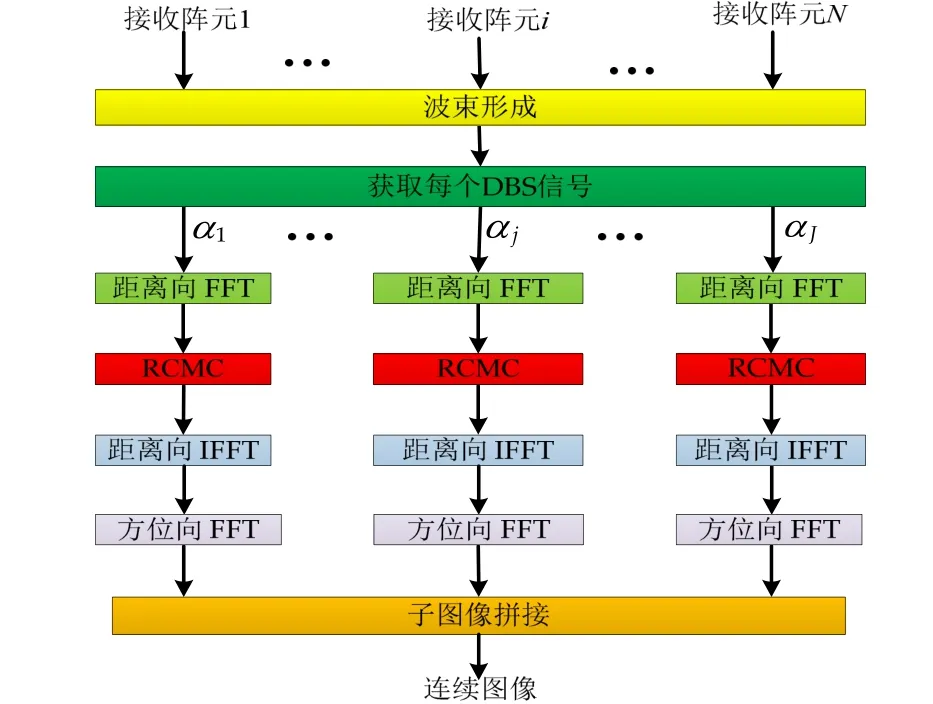
图4 DBS 成像流程图
(1)在N个接收阵元组成的阵列上,利用接收回波进行波束形成以获得观测区域的信息,结果如图2(a)所示。
(2)从波束形成的输出中提取每个DBS 二维信号,并根据式(13)限制脉冲的空间长度。
(3)通过距离向快速傅里叶变换(FFT),将信号转到距离频域去处理。
(4)根据 ΔR(t;r)找到对应的距离频率的线性函数,并与信号进行相位相乘将不同的DBS 信号搬移至同一个距离门。
(5)通过距离向傅里叶逆变换(IFFT)将信号变回二维时域。
(6)在二维时域中进行方位向FFT 以得到子图像。然后根据多普勒频率和方位角之间的关系,将子图像用方位角和距离表示出来。
(7)在每个DBS 的子图像上执行图像拼接,得到连续图像。
2 前视声呐DBS 特性分析
考虑到DBS 技术的发展起源于雷达[10-12],所以有必要比较雷达和前视声呐之间在DBS 技术上的不同之处。
(1)扫描方式不同 雷达通常采用机械扫描,波束宽度是固定的,且为顺序扫描,所以在进行DBS 处理时比较复杂。而前视声呐采用波束形成技术控制波束方向,因此,多普勒中心频率在前视声呐中是准确的。由于机械扫描的精度有限,所以其在雷达中是估计值,不够精确。此外,前视声呐几乎同时完成对整个成像区域的扫描,所以给图像拼接带来便利,不需要考虑运动误差。
(2)RCMC 不同 对于雷达而言,平台速度通常小于1000 m/s,载波速度为3×108m/s,平台与载波的速度比为3.33×10-6,所以在信号发射与接收之间平台的移动距离非常短可以被忽略。但是对于声呐来说,平台速度通常小于10 m/s,载波速度为1500 m/s,平台与载波速度比为6.7×10-3,所以收发信号时声呐平台的距离移动是不能被忽略的。从这点来讲,RCMC 对雷达来说是不一定需要的,但对声呐来说是必须存在的。
3 计算机仿真验证
为了评估单点目标的成像效果,进行了单点仿真,仿真场景如图5(a)所示。根据表1 中的参数可知,目标被声呐覆盖的时间是3.60 s,对应于9个脉冲信号,它比通过式(11)得到的最大相干积累时间3.35 s 要大,所以要去掉一个脉冲,只有8个脉冲被DBS 所利用。根据式(8),理论的方位角分辨率为0.26°,利用DBS 技术,仿真结果如图6。从图6(a)可知目标聚焦效果良好。为了进行更详细的比较,给出了目标的方位剖面图,见图6(b),并对方位分辨率进行了测量,结果是0.26°,与理论值保持一致。

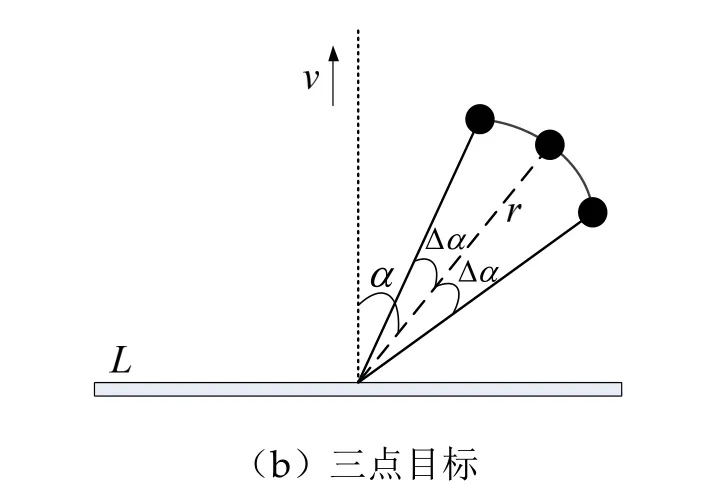
图5 仿真场景

图6 单目标仿真
为了考察本方法对多个目标的适用情况,对图5(b)中的场景进行了仿真研究。由表1 中的参数可知,对应前视声呐的方位分辨率为1.0°,所以在使用DBS 方法之前和之后的比较研究应分为两种情况。在第1 种情况下,目标和声呐之间的距离相同,目标之间的方位角间隔为2°,大于声呐的方位分辨率,因此即使不使用DBS 方法,也可分别识别出场景中的各个目标。相比之下,第2 种情况,目标方位角间隔为0.5°,如果不使用DBS 则无法识别出目标,即目标混在一起。图7(a)和(b)分别显示了在使用DBS 之前和之后的第一种情况的成像结果,图8(a)表示的是其方位剖面图。通过比较图7(a)和(b),我们很容易发现,使用DBS之后的成像质量要比使用之前的效果好很多,从方位剖面图看也可以得出同样的结论。

表1 仿真系统参数表
此外,图7(c)和(d)分别显示了在使用DBS之前和之后第二种情况下的成像结果,图8(b)为方位向剖面图。通过比较图7(c)和(d),很明显地发现目标在(d)中能够清楚的识别出来,但是在图(c)中只能看到一个目标,图8(b)给出了相同的比较结果。
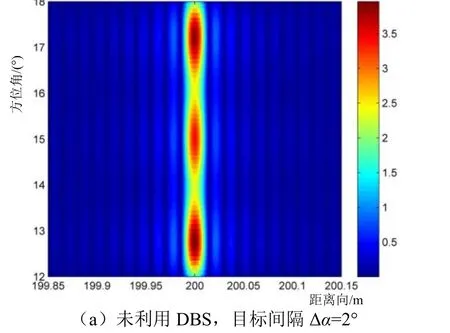

图 7三目标仿真结果


图8 成像结果的方位剖面图(红线和蓝线分别表示使用DBS 前后)
综上所述,仿真实验的结果表明利用本章所提出的DBS 方法可以有效地提高前视声呐的方位分辨率,并符合理论值要求。
4 结语
DBS 技术在声呐中比在雷达中更有优势,本文结合不同的情况,分类进行了仿真实验验证。无论是单个目标还是多个目标,无论目标是否在同一个分辨单元内,利用了DBS 技术的仿真结果明显优于未使用该技术的仿真结果,凸显了本方法理论上的正确性和有效性。此外,本文给出成像算法后只停留在计算机仿真阶段,缺少实测数据的支持,下一步将通过实验进行实测数据验证。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
结构工程师(2022年2期)2022-07-15
幼儿园(2021年12期)2021-11-06
海洋信息技术与应用(2020年3期)2020-08-24
空间科学学报(2020年4期)2020-04-22
小学科学(学生版)(2019年10期)2019-11-16
现代计算机(2018年19期)2018-08-01
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
火控雷达技术(2016年2期)2016-02-06
