
一种四绳机械抓斗起重机钢丝绳预紧的控制方法
2021-07-22 02:44:18赵丽媛常中龙张一然
起重运输机械 2021年12期
赵丽媛 常中龙 李 力 张一然
北京起重运输机械设计研究院有限公司 北京 100007
0 引言
随着人们物质生活消费水平的提高,生活垃圾也愈加增多,对于垃圾的无污染处理亟需解决。目前,通过生活垃圾发电处理厂解决生活垃圾的无害利用问题。因此针对垃圾处理厂的工业配套设备也在不断地增多,其核心设备垃圾抓斗起重机在生活垃圾处理方面也变得愈发重要。垃圾处理行业为24小时工作制,因此抓料设备的运行效率至关重要。针对目前四绳机械抓斗起重机运行效率低的问题,本文提出一种四绳抓斗起重机钢丝绳预紧的控制方法,用以提高起重设备的运行效率。
1 四绳机械抓斗的结构及工作方式
上横梁(含滑轮组)、下横梁(含滑轮组)、拉杆和抓斗部为四绳机械抓斗的重要组成部分,并与起重机小车上带有两组卷筒的桥式起重机配合使用[1]。两组卷筒分别为控制抓斗起升和控制抓斗开闭。如图1所示,每组卷筒引出2根钢丝绳,共4根钢丝绳,其中2根钢丝绳与抓斗顶部平衡粱连接,作为升降支持用;另外2根穿过抓斗顶部,与上横梁与下横梁的滑轮组连接,起抓斗开闭作用。
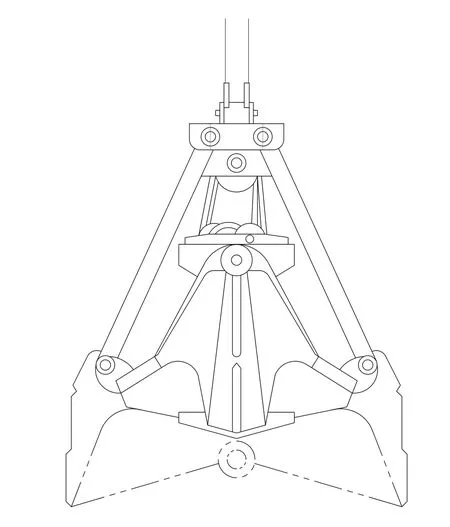
图1 四绳机械抓斗
1.1 四绳机械抓斗的工作方式
1)抓料预备阶段 升降钢丝绳向上升提升抓斗,起升钢丝绳受力;下横梁钢丝绳滑轮组下降,负责开闭抓斗钢丝绳放松,抓斗打开。大小车运行至物料堆上方,此时抓斗的质量全部由起升钢丝绳承受。
2)抓料进行阶段 升降钢丝绳下降放松,抓斗打开下落在物料上方,负责闭合的钢丝绳开始起升,通过滑轮组带动抓斗闭合以实现抓取物料。起升瞬间,闭合钢丝绳单独受力[2],起升钢丝绳处于松弛状态,随后开始逐渐收紧,负载的全部质量由起升钢丝绳和闭合钢丝绳共同承担。
3)物料释放阶段 大小车及抓斗运行至卸料点上方。下降钢丝绳及闭合钢丝绳缓慢下降至卸料点位置,闭合钢丝绳缓慢下降放松,抓斗随之打开,物料释放完毕。
2 四绳机械抓斗存在的问题
在抓料进行阶段,为了提高抓料时的抓满率,抓斗在下降时通常以较快的速度冲向物料,沉入物料内部,此时起升和开闭钢丝绳处于完全松弛状态。在四绳机械抓斗抓料闭合过程中,由于通常都是开闭电机先动作,带动开闭钢丝绳上升,升降钢丝绳保持静止,形成抓斗闭合动作。伴随着闭斗动作的完成,开闭钢丝绳绷紧逐渐上升受力,而升降钢丝绳仍处于松弛状态。取料完毕准备上升时,通常需要人工先调整升降钢丝绳与开闭钢丝绳同步紧绷平衡后再上升。或在上升的过程中,起升钢丝绳加速去追赶开闭钢丝绳,达到同步受力平衡后再保持速度一致。上述无论哪种方式,都将降低抓斗提升的工作效率,增加了操作的复杂程度,降低钢丝绳的使用寿命。
本文提出一种针对四绳机械抓斗在抓料时开闭钢丝绳上升过程中,同步预紧升降钢丝绳的控制方法,使抓斗在闭合完毕时,升降钢丝绳与开闭钢丝绳均能保持绷紧状态,同步受力均匀。
3 四绳机械抓斗预紧控制方法
四绳抓斗一般为物料的搬运吊具,可配备不同形式的抓斗起重机。由于生产效率的不同导致抓斗起重机设置的速度不同,其内部的控制系统也不同。四绳抓斗起重机由2台变频器控制,分别为负责起升钢丝绳的变频器和负责开闭钢丝绳的变频器[3]。本文设计一种四绳机械抓斗起重机抓料时钢丝绳预紧的控制方法。主要解决常规四绳机械抓斗在抓料闭合时,升降钢丝绳与开闭钢丝绳不能自动保持同步绷紧状态,导致升降、闭合机构工作效率低,操作较为复杂,钢丝绳受力不均、使用寿命短等问题。
该方法中涉及的控制核心内容包括两大主要系统:抓斗状态检测系统、抓斗开闭和升降控制驱动系统。抓斗状态检测系统主要功能为检测抓斗实时质量信号,并将相关信号数据发送给控制驱动系统,用以判断抓斗是否已经落在物料表面。该检测系统是以安装在起重机小车机构上的质量传感器(见图2),以及变送器、无线收发装置为核心器件,将检测到的质量信号经无线收发装置传输给中央可编程控制器PLC,通过质量值来判断抓斗是否处于落料状态。
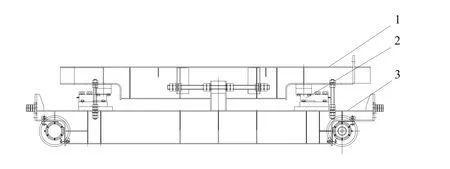
图2 重量传感器布置图
起重机抓斗开闭和升降控制驱动系统是以PLC中央控制器为核心控制器件,以旋转编码器为位置检测元件,以开闭变频器和升降变频器为调速装置[4],用Profibus现场总线将PLC与两台调速变频器连接成控制驱动网络,以开闭电机和升降电机为开闭钢丝绳和升降钢丝绳的驱动装置组成控制驱动系统(见图3)。PLC通过接收抓斗状态检测系统发送过来的质量信号并转换为相关数据,通过PLC程序控制变频器来驱动电机执行相关的动作。
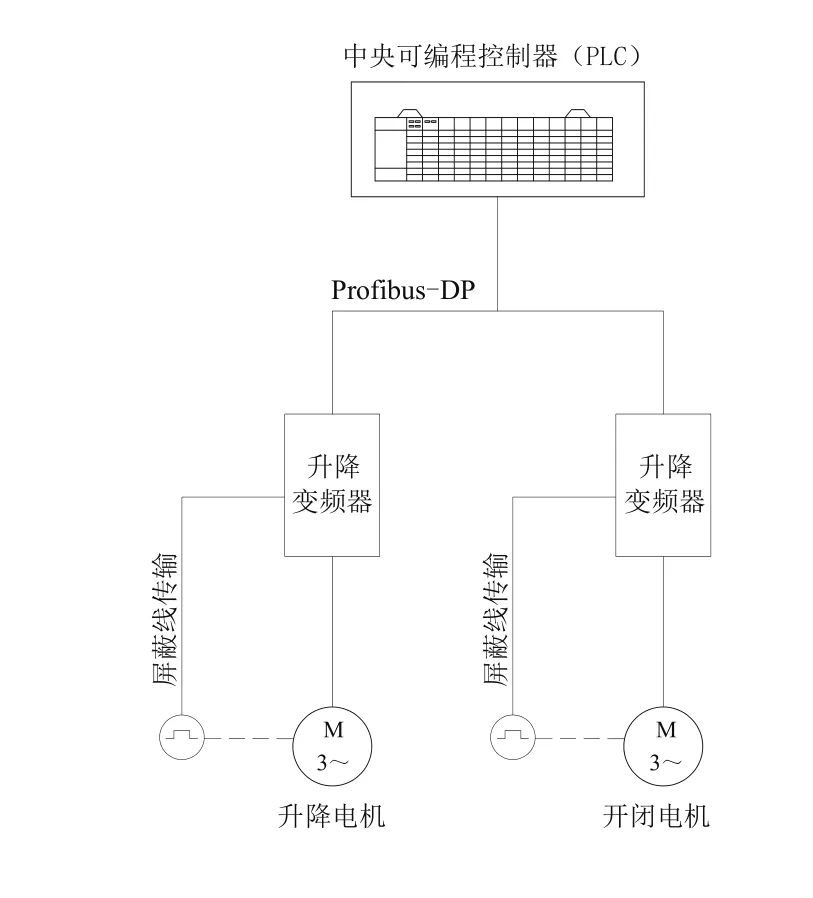
图3 控制驱动系统图
钢丝绳预紧控制方法是通过抓斗状态检测系统提供的质量信号来判断抓斗是否已经落在物料上处于取料状态,当PLC程序判断抓斗确实落在物料上并开始取料时,起重机抓斗开闭和升降控制驱动系统的PLC在抓斗抓料闭合的过程中会通过升降变频器自动给升降驱动电机分配一个小转矩,使升降钢丝绳缓慢上升并保持预紧状态。当抓斗取料完毕后,开闭电机与升降电机同步上升时,开闭钢丝绳与升降钢丝绳将基本保持同步,受力均匀。
此控制方法可有效提高起重机工作效率,优化钢丝绳工作状态,大幅提高钢丝绳使用寿命。结构简单,易于实现,具有良好的通用性,适用于目前大多数的四绳机械抓斗起重机。
4 总结
本文通过对四绳抓斗起重机的抓斗机构及运行原理的分析,提出其运行效率低的可能原因,并提出一种钢丝绳预紧的方法。该方法采用PLC及变频器控制的方法,对开闭电机及升降电机进行协调控制,实现当抓斗取料完毕后,开闭电机与升降电机同步上升时,开闭钢丝绳与升降钢丝绳将基本保持同步,受力均匀。避免在抓料时,升降钢丝绳处于松弛状态,在上升的过程中,起升钢丝绳无需加速去追赶开闭钢丝绳,节省了时间,进而提升了四绳抓斗搬运物料的运行效率。
猜你喜欢
防爆电机(2020年3期)2020-11-06 09:07:42
山东交通科技(2020年2期)2020-08-13 09:24:00
中国特种设备安全(2019年11期)2020-01-16 08:06:14
中国特种设备安全(2018年11期)2019-01-08 02:09:08
中国特种设备安全(2018年10期)2018-12-18 02:16:46
测控技术(2018年5期)2018-12-09 09:04:50
石油化工建设(2018年2期)2018-07-11 01:24:56
电子制作(2017年7期)2017-06-05 09:36:13
消费导刊(2016年10期)2016-12-01 07:53:03
船舶标准化工程师(2015年5期)2015-12-03 11:00:24
