
火电机组协调控制系统预测控制的仿真研究
2021-07-19 00:48:52崔晓波
南京工程学院学报(自然科学版) 2021年2期
赵 震,薛 锐,崔晓波
(南京工程学院能源与动力工程学院, 江苏 南京 211167)
目前多数火力发电厂控制系统既要维持机组的运行稳定,同时还要响应电网功率需求,而锅炉与汽轮机的动态特性有较大的差异,必须协调好二者之间的关系.火电厂协调控制[1]是一个典型的多变量控制系统,具有非线性、模型较难精确建立等特点,而且变量之间的耦合度较高,常规的协调控制策略难以满足要求.
预测控制[2]是20世纪70年代后出现的一种自动控制算法,具有良好的抗干扰性能,适合多变量耦合系统的控制要求,随着信息及自动化技术的发展,预测控制在火电厂协调控制领域有一定优势.预测控制算法经过多年的发展已有许多种类,其中具有代表性的有模型算法控制(MAC)、动态矩阵控制(DMC)[3]和广义预测控制(GPC)[4]等.
1 对象模型
本文的研究对象为某电厂机组的协调控制系统[5],根据预测控制方法建立控制器模型并仿真.该被控对象的传递函数为:

某机组控制对象传递函数的阶跃曲线如图1所示.
协调控制分类方式一般有两种:第一种是按反馈回路,分为汽机跟随和锅炉跟随;第二种是按前馈回路,分为能量直接平衡和指令信号间接平衡.汽机跟随工作方式为锅炉主控制器接受负荷指令,汽机主控制器保证压力;锅炉跟随工作方式为汽机主控制器接受负荷指令,锅炉主控制器保证压力.协调控制方式中,锅炉和汽机的地位平等,二者同时接受负荷指令,根据二者之间已制定好的策略进行协调控制.

(a) u1阶跃时的y1响应
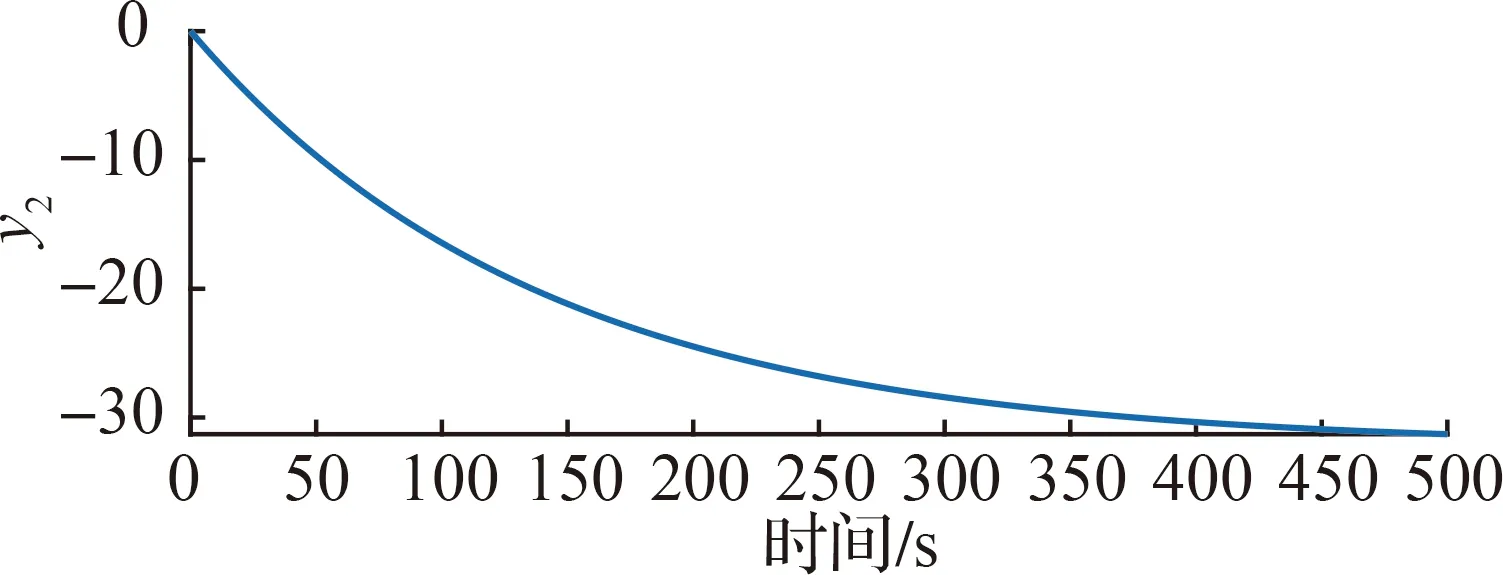
(c) u1阶跃时的y2响应

(b) u2阶跃时的y1响应

(d) u2阶跃时的y2响应
好的协调控制系统能快速跟随电网发来的负荷指令变动,并且在内扰和外扰发生时亦能使汽压偏差和功率偏差尽可能减小.
2 控制策略及仿真算法
预测控制主要工作原理是根据预测模型设计系统控制指标,然后确定控制量,通过反复计算的方式来求得最佳控制方案.在确定好一系列的控制指标后,还要考虑模型可能出现失配的情况或者存在内外扰动,所以预测控制不是一成不变的实施固定的控制指标,而是根据预测时间段内的模型指标实现当前的控制,进入下一阶段的采样时刻时,先要依据预测模型计算得到新的输出,再对其做修正优化[6].预测控制包括模型预测、滚动优化、反馈校正三部分,其结构见图2.

图2 预测控制的结构
动态矩阵控制算法采用的模型为阶跃响应模型,广义预测控制则引入了自适应控制的概念,本文采用动态矩阵控制算法.
设预测模型为:
(1)
滚动优化的性能指标为:

(2)
式中:w(k)为设定值;yM(k)为测量值;Δu(k)为控制器输出值增量.
近年来,小儿肺炎发病率居高不下,严重影响患儿身体健康。临床发现,小儿肺炎发病的主要原因为病原体通常从呼吸道侵入,引发肺泡、小支气管以及肺间质炎症,造成小支气管管腔变得狭窄甚至阻塞,导致通气障碍;而炎症会造成呼吸膜厚度增加,造成很多炎症渗出物存于肺泡腔内,导致换气障碍。通气与换气障碍会导致机体缺氧与二氧化碳潴留,从而引发一系列病理与生理性改变,严重者甚至会出现呼吸衰竭症状,威胁患儿生命安全[2]。因此,寻找一种安全有效的治疗方案具有重要的临床意义。
在不考虑约束的情况下,由式(1)求出使式(2)性能指标最优的全部控制增量为:

(3)
控制增量为:
Δu(k)=LΔuM(k)
(4)
反馈校正的输出误差为:

(5)
经校正的预测向量为:
(6)
(7)
整个控制过程就是以上述算法结合反馈校正的滚动优化方法反复在线进行的过程.
3 结果与分析
MPC设计参数比较多,本文结合仿真结果讨论预测时域长度p、控制时域长度m和控制权重w对控制性能的影响.采样周期Ts相对固定,采样周期的选择主要从控制效果与稳定性两方面综合考虑,如果Ts过小会导致采样信息过多,Ts过大会增加系统的扰动、降低系统的动态性能,综合比较取Ts=3 s.
3.1 预测时域长度p
预测时域长度p表示用从k时刻起经p步后的预测输出y(k+i)来逼近给定值yr(k+i)(i=1,…,p).预测时域长度应当包含所研究模型的整个动态变化过程,即包括影响控制过程的最主要部分,从对象模型的阶跃响应过程到系统稳定的时间可近似作为预测时域长度p的取值.系统控制的稳定性和快速性与预测时域长度p有很大的关系.p较小时,系统的多步预测更接近于单步的状况;如果p取得特别大,接近于稳态控制,即m个控制增量的响应占据了预测值主要地位,那么动态优化就变成了稳态优化.此外p过大使得控制矩阵阶次过高,计算量增加很多.所以选取预测时域长度时首先应考虑使所选择的p包含对象响应的上升部分,然后考虑快速性时则减小p,侧重稳定性时则增大p,逐步选取到合理的预测时域p.本文针对协调控制对象选择p=150、100、20分别进行仿真,取m=2,w=[1 1],结果如图3所示.
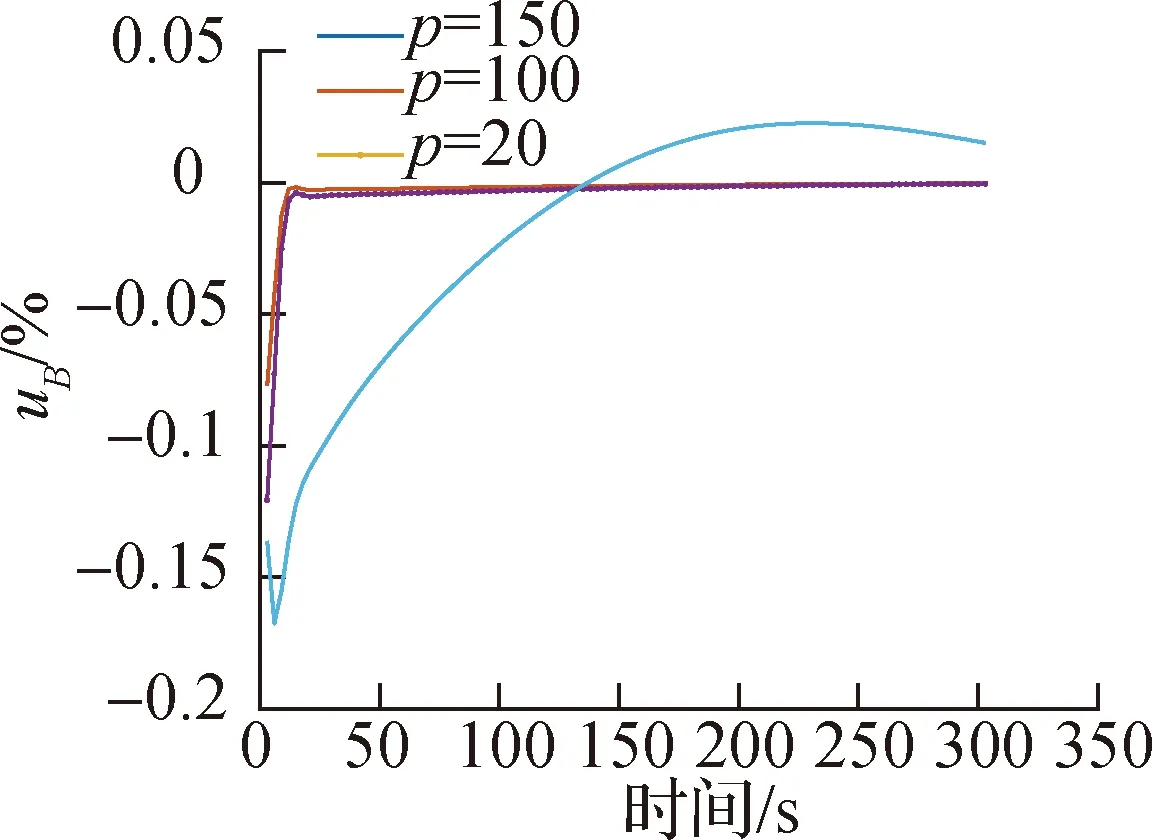



(a) PT设定值阶跃时预测时域p对系统性能的影响




(b) Ne设定值阶跃时预测时域p对系统性能的影响
3.2 控制时域长度m
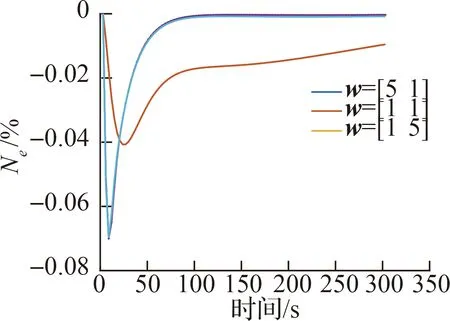
控制时域长度m是指按照性能指标式(2)最小化计算出控制量的个数,一般取m (a) PT设定值阶跃时m对系统的影响 (b) Ne设定值阶跃时m对系统的影响 控制量加权矩阵和输出量加权矩阵的选择具有相对性,即增加一个加权矩阵,相当于减小另一个加权矩阵.本文将输出量加权矩阵(状态加权矩阵)用Q表示,控制量加权矩阵用R表示,控制量为汽机调门开度u1与锅炉燃料量u2,输出量为机组功率y1与机前压力y2.加权矩阵变化可作为系统动态性能与稳态性能在控制中的比重变化.增加或减小加权矩阵Q和R,对系统的控制效果不产生影响,所以在实际系统中,用控制量加权矩阵R来限制控制输出,防止其剧烈波动,有利于增强系统稳定性.对协调控制对象w为[5 1]、[1 1]、[1 5]三种情况进行了仿真,取p=100,m=2,结果如图5所示. (a) PT设定值阶跃时控制权重w对系统性能的影响 (b) Ne设定值阶跃时控制权重w对系统性能的影响 预测控制是建立在模型基础上的一种自动控制算法,具有良好的抗干扰性能,本文通过对发电机组多变量协调系统进行预测控制仿真,得到了控制参数设计的一些原则.增大预测时域长度p可以得到相对稳定的控制,减小则动态性能变差;较大的控制时域长度m可使更多步数的控制增量变化,系统更加灵活机动,但稳定性变差;控制权重w则在稳态和动态特性之间进行调节,过于抑制控制增量反而使系统得不到及时调节,导致动态性能恶化.比较而言,m、w对控制系统性能指标影响更为明显,p对控制系统性能指标影响并不显著.火电厂协调控制是一个典型的多变量控制系统,预测控制在其中的应用能提升系统整体性能.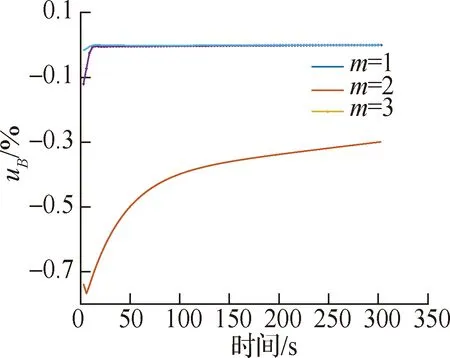







3.3 控制权重w







4 结语
猜你喜欢
湖北农机化(2021年7期)2021-12-07 17:18:46
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
天津教育·下(2018年9期)2018-07-13 08:25:47
自动化学报(2017年4期)2017-06-15 20:28:55
自动化仪表(2015年5期)2015-06-15 19:01:34
汽车维修与保养(2015年6期)2015-04-17 03:31:40
质量技术监督研究(2015年1期)2015-04-09 06:42:12
电网与清洁能源(2015年2期)2015-02-28 16:03:08
电测与仪表(2014年22期)2014-04-04 11:55:06
电力自动化设备(2013年11期)2013-09-18 02:55:14
