基于Sobel算法的太阳能光伏组件红外图像识别技术研究及应用
2021-07-18 11:43冯宗海曾华锋冯春海
中阿科技论坛(中英文) 2021年7期
冯宗海 蔡 广 曾华锋 冯春海
(华能海南清洁能源分公司,海南 海口 570311)
1 绪论
据统计,2015年中国光伏发电新增装机容量为15.13 GW。到2019年,新增光伏装机容量达30.1 GW。2021—2022年的需求有望分别达到160 GW、190 GW,恢复较快增长速率。考虑容配比因素,预计2020—2022年全球光伏组件需求有望达到134 GW、180 GW、210 GW[1]。
从行业发展来说,当前我国光伏产业发展正处于从追求规模与速度向重视效益与质量转变的关键时期。光伏产业经过快速发展,成为我国可以参与国际竞争的新兴产业。我国光伏产业正在从规模化向质量化发展。充分利用物联网、云计算、大数据、智能硬件、移动宽带互联网等信息技术,推动光伏产业从自动化向智能化升级,加快实现智能制造和智能应用,已成为产业发展的必然趋势[2]。光伏阵列排列状况复杂,光伏电站外部环境多变,这些都使得光伏阵列故障检测困难,光伏阵列红外图像分割效果难以令人满意。传统的故障检测手段在大规模的光伏阵列中并不适用,因此发展智能光伏诊断既符合国家对光伏产业发展的要求,也顺应了光伏诊断的发展趋势,对于提升我国光伏产业的发展质量与效率,具有战略性意义。
依据光伏阵列异常发热进而影响光伏组件功率的特性,光伏阵列故障诊断一般分为两大类:基于电气特性的故障诊断方法和红外测量的故障诊断方法。电气测量法大都利用单一参数进行故障诊断,虽然在一定程度上通过数据挖掘解决了故障定位问题,但是依旧难以直接对光伏组件进行精确的故障定位。红外测量方法可以通过红外图像对故障部位进行精确定位,但上述红外测量图像处理方法大都基于阈值分割或改进的阈值分割方法。基于阈值的分割方法只能针对特定的红外设备和特定工况下的图像进行分割。Sobel算子是一种离散性差分算子,用来检测图像像素的差异,会使得红外图像的分割检测更加智能与便捷,因此本文提出了一种基于Sobel算子的太阳能光伏组件红外图像的识别方法[3]。
2 基础理论和原理
2.1 基础理论
光伏系统的故障诊断对光伏发电系统的高品质平稳运行具有至关重要的作用。光伏阵列故障可概括为:组件内部电池片故障;二极管故障或旁路工作状态;组件存在表面污迹;组件被阴影遮挡;保险烧毁或断路。这些故障都明显体现在故障部位的温度上,一般表现为故障部位异常发热。由于光伏阵列的输出特性具有明显的非线性特征,局部异常发热会迅速改变光伏组件的电压电流状态,进而降低光伏组件的输出功率,从而降低了光伏系统的发电效率。为保证光伏阵列安全运行,提升光伏阵列的发电效率,因此必须及时、准确地排除光伏阵列故障。
一般的太阳能光伏发电站都安装了大规模的光伏发电阵列,如果阵列中的某一块或者某几块光伏组件出现故障,依靠人为测量光伏组件的电气特性发现并排除故障的难度非常大,费时又费力。一个光伏阵列由若干光伏组件构成,光伏阵列的电气特性也是单块光伏组件电气特性的线性叠加,小规模的光伏组件电气特性改变会被整个光伏阵列电气特性数据给湮灭,因此难以从阵列数据中获取光伏部件故障信息。通过红外测量对光伏组件进行故障检测是一种更加有效可行的方法。
2.2 基础原理
2.2.1 高斯滤波原理
基于光伏电站现场环境因素以及红外成像仪器固有特性,红外热图普遍会存在图像边缘模糊、目标对比度差、非均匀成像及噪声较大等缺点。相比于可见光图,红外热图噪声颗粒更大,噪点分布更加不规律。高斯滤波是一种线性平滑滤波,用于消除高斯噪声,对大颗粒的随机噪声有更好的滤波效果,被广泛应用于图像处理的减噪过程。
高斯滤波器是根据高斯函数的形状来选择权值的线性平滑滤波器。对于图像来说,高斯滤波器是由二维高斯函数获得的二维的卷积核。因此需要由一维高斯函数式(1)获得二维高斯函数式(2)。高斯函数是一种正态分布的曲线,在图形上,正态分布是一种钟形曲线,越接近中心,取值越大,越远离中心,取值越小。计算平均值的时候,本文使用一个N×N的高斯卷积核对目标图像的每一个像素进行卷积,用高斯卷积核领域内像素的加权平均灰度值去代替高斯卷积核中心的像素点值。


则简化后的梯度算子计算结果为:

2.2.3 大津自适应阈值分割法原理
日本学者大津(Nobuyuki Otsu)于1979年提出的最大类间方差法是一种自适应的阈值确定的方法,又叫大津法,简称OTSU。依据图像灰度值的不同,OTSU将图像分为背景和前景两个部分,前景是需要按照要求分割出来的部分,背景是需要舍弃的部分。前景和背景的分界值就是需要求出来的阈值。遍历不同的阈值,计算不同阈值下对应的背景和前景之间的类内方差,当类内方差取得极大值时,对应的阈值就是大津法(OTSU算法)所求的阈值。
3 处理方案及结果
3.1 处理方案
由于光伏阵列红外图像普遍存在背景复杂,边界模糊,噪声较大,非均匀成像以及不同环境、不同红外设备成像后阈值范围差异很大等特性,传统的分割方法难以广泛适用且分割结果不够准确。针对传统分割方法的不足,本文提出了一种基于Sobel算子的OTSU分割方法。
首先采用高斯滤波对获得的红外图像进行预处理,以消除现场随机噪声和设备干扰对图像的影响。对预处理之后所得红外图像使用Sobel算子进行处理,以获取分割区域,提取故障部位。最后对经过Sobel算子处理后的图像采用OTSU算法进行二次分割获取最终的红外图像故障识别区域。流程如下:原始红外图像→高斯滤波→sobel算子检测→OTSU分割→分割结果。
3.2 结果展示
如图1所示,a1~a5为一组原始红外图像,b1~b5为高斯滤波后的红外图像,c1~c5为经过Laplace算子检测后的红外图像,d1~d5为Scharr算子检测后的红外图像,e1~e5为Sobel算子检测后的红外图像,f1~f5为设置阈值为160后的分割图像,g1~g5为OTSU分割后的图像。
3.3 验证分析
将e行图像分别与c行和d行图像相比可以看出,Laplace算子获得的特征区域过少,难以有效分割;Scharr算子获得太多的无用信息,从而导致需要的特性区域比例变小,且噪声非常严重;Sobel算子获得了需要的特性信息,对滤波后的红外图像进行了有效的特征提取。将g行与f行相比较可以看出,普通的阈值分割方法不够灵活,且需要人为设置阈值,不同工况下的不同图像最优分割阈值也有很大差异。如f3相比于f行其他图像,在阈值为160时取得了很好的分割效果,而f1、f2、f4效果就差很多,f5效果非常差。g行经过OTSU自适应阈值分割法普遍取得了很好的分割效果,g1检测到了不明显区域的热斑与很小的光斑点,g2检测到了明显的小热斑与大热斑渐变区域,g3对由遮挡引起的热斑做了完美的分割,g4在检测到热斑区域的同时也检测到了遮挡物,g5做到了对热斑区域与故障部件的检测。
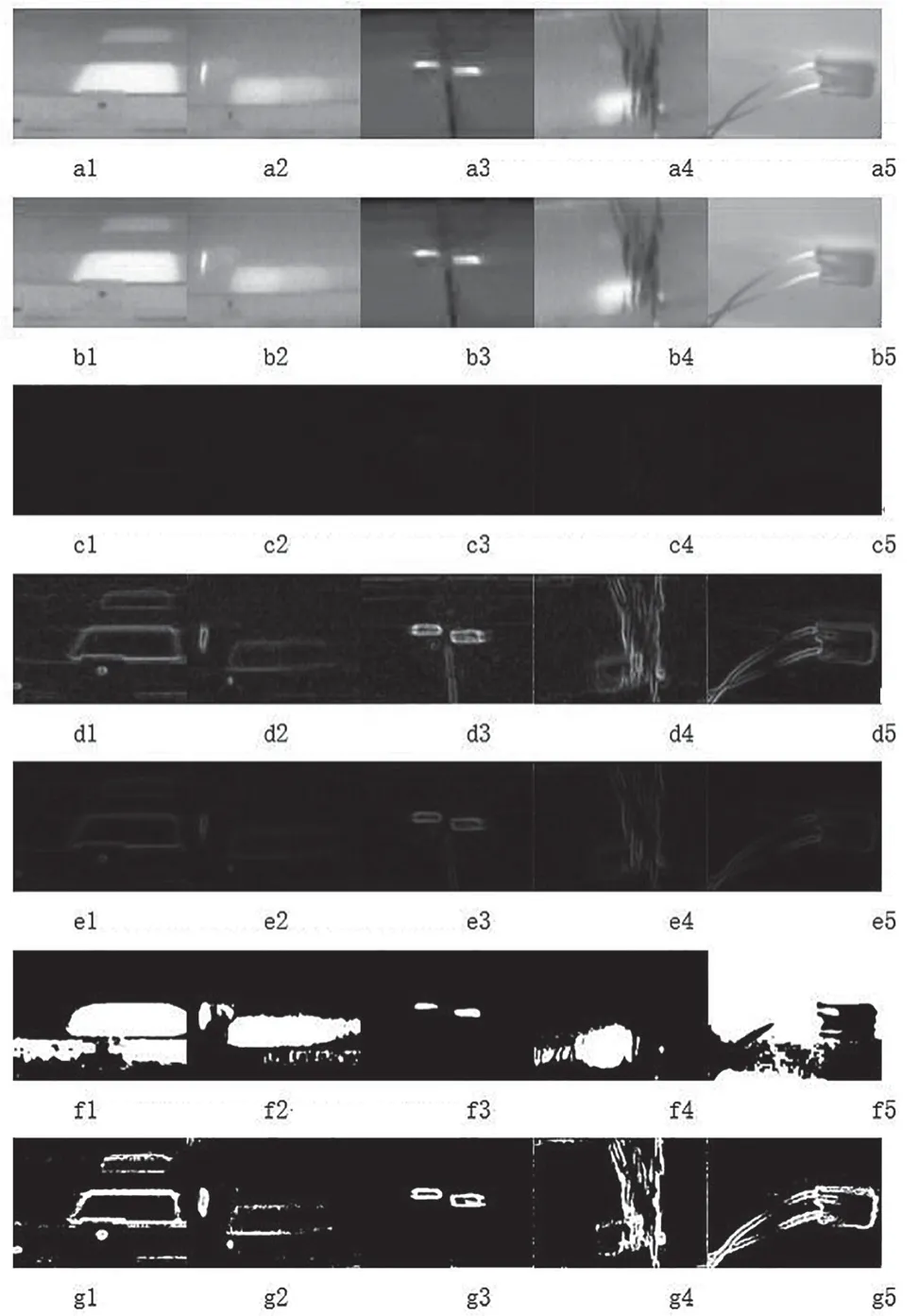
图1 各种方法对比结果图
4 结论
考虑到复杂光伏阵列红外图像的特性,针对传统分割方法不灵活、不准确、分割效果差等不足,本文提出了一种基于Sobel算子的OTSU分割方法。实验结果表明,本文的分割方法可以对光伏阵列的明显故障区域、不明显故障区域、小热斑、故障部件等进行有效准确的分割。
猜你喜欢
环球时报(2022-05-23)2022-05-23
数学物理学报(2021年2期)2021-06-09
金桥(2021年4期)2021-05-21
应用数学(2020年2期)2020-06-24
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
电子制作(2019年7期)2019-04-25
数学年刊A辑(中文版)(2018年2期)2019-01-08
数学物理学报(2016年3期)2016-12-01
光学精密工程(2016年3期)2016-11-07