
浅析“机器人人工智能技术应用”赛项
2021-07-18 07:12刘利宁殷希中
电子制作 2021年12期
刘利宁,殷希中
(安徽阜阳技师学院,安徽阜阳,236000)
0 引言
人工智能(也叫智械、机器智能),是人类制造的机械设备所能体现的一种智能,一般离不开程序的编写。人工智能,它可以说是“智能主体的研究和设计”,智能主体一般包括由周围设备所组成的系统。这个系统可以正确解释一些外部数据,并且通过这些数据进行学习,从而利用这些知识灵活适应外部环境,最终完成某项特定任务。
全国人工智能应用技术技能大赛,是我国首次面向人工智能应用技术领域举办的一类职业技能大赛,承载着人工智能应用“智能感知、决策分析及判断、深度学习、自主执行、多设备间的互联互通、自我管理和综合应用”等多个方面的技术,目的在于加快培养和选拔人工智能应用技术领域高素质技能人才。大赛竞赛平台均为工业化设备,竞赛形式按照企业的实际生产流程进行,竞赛任务基于真实的企业生产调试环节,竞赛过程符合企业生产流程标准,竞赛考核的核心技能,正是该领域高技能人才在生产中所需要掌握的关键技能。
1 机器人人工智能技术应用赛项简介
赛项名称 :计算机程序设计员(机器人人工智能技术应用)。
技术思路:根据先进制造技术与人工智能技术融合发展趋势要求,聚焦智能制造系统的装备智能化等关键技术领域,开展全国人工智能应用技术技能大赛机器人人工智能技术应用赛项。本赛项以智能机器人、工业机器人、协作机器人、AGV(自动导引小车)等多种典型机器人组成的智能制造系统装备为载体,选取多种机器人在智能制造体系中协作工作的真实场景,融入人工智能、5G+制造、工业互联网等技术,着重体现人工智能技术在智能制造领域中面向机器人智慧化的最新应用。通过举办该项目大赛,借以展示机器人人工智能技术应用态势和发展需求,促进参赛选手在智能制造领域综合职业能力的提升。竞赛组别:职工组和学生组。
2 机器人人工智能技术应用赛项技术平台
职工组采用江苏汇博机器人技术股份有限公司自主研发的“机器人人工智能技术应用”技术平台。该平台以智能机器人技术、5G 网络技术、人工智能技术、多传感器融合技术、自主控制技术,自主决策技术、人机共融技术以及自主规划等技术为主线,以工业机器人、协作机器人、AGV等多种典型机器人为载体,对多种形式机器人进行人工智能技术赋能,充分体现了机器人智能感知、自动决策、自主执行、互联互通、深度学习、人机交互、自我管理等的综合赋能应用,能够对接典型制造工业场景完整工艺流程,展现机器人在智能制造行业应用的真实场景业务需求,有效培养人工智能技术应用领域高素质复合型技术技能型人才。

图1 职工组比赛平台

图2 学生组比赛平台
学生组采用广州慧谷动力科技有限公司自主研发的“机器人人工智能技术应用平台”。该平台比职工组平台少了智能机器人,智能机器人对应的的通信、编程、物料抓取、巡检等功能在学生组平台上不能实现。
3 机器人人工智能技术应用赛项技术浅析
■3.1 赛项技术描述
以机器人人工智能技术应用赛项职工组技术为例,本赛项由“机器人智能仿真场景搭建及应用”、“工业机器人人工智能技术生产应用”、“移动操作单元人工智能技术应用”、“智能机器人人工智能交互技术应用”、“机器人人工智能技术综合应用”五个任务组成,在考察参赛选手的机器人综合应用编程、工业网络互联互通及人机协作的知识与能力的基础上,重点测评参赛选手应用人工智能平台、人工智能工具的基础上智能化机器人以及实现智能制造工业场景任务的能力。
■3.2 线上考核任务
机器人智能仿真场景搭建及应用。根据任务书要求,安装、部署仿真环境,完成3D 场景模型的创建。在搭建的仿真环境当中,通过编写图形化程序,进行若干典型的机器人深度、强化学习等人工智能技术的训练及部署,赋能机器人完成指定任务。
在这个比赛环节中,只提供一台电脑,要求选手一个小时完成比赛任务。由于该赛项是双人团队赛,所以两位选手要共同完成比赛任务,这样就对选手的合作能力提出了较高要求。两位参赛选手要尽可能做到默契配合,不光有合作,也要合理分工。

图3 线上任务场景
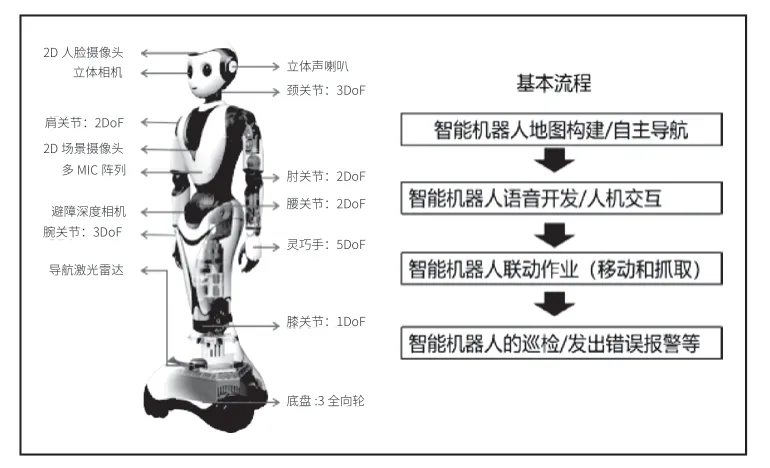
图4 线下智能机器人及任务
■3.3 线下考核任务
3.3.1 智能机器人及人工智能交互技术应用
根据任务书要求,通过人工智能技术赋能,完成智能机器人作业场景地图构建;完成智能机器人语音交互任务的编写,实现人机交互和控制;通过智能识别和动作规划,实现智能机器人对物料盒的位姿识别与抓取;通过智能机器人编程与调用,完成智能机器人生产巡检等交互作业任务。
选手需要使用相关软件完成场景搭建,地图创建等,要根据任务要求编写蓝图程序控制智能机器人进行杯子的识别、抓取以及杯中螺帽螺钉的倾倒,为工业机器人和3D 智能相机的识别、分拣和装配做准备。为了确保仓库成品有序放置,选手还要通过软件编写智能机器人巡检的蓝图程序。整个任务环节要编写较多的程序,程序之间联系密切,稍有不慎可能前功尽弃。
3.3.2 移动操作单元人工智能技术应用
根据任务书要求,通过人工智能技术赋能,完成移动操作单元(主要含AGV/操作臂)的地图构建、自主避障、路径规划;通过控制协作机器人和视觉系统,在给定任务序列的条件下,完成仓库工件的取放任务。
选手要能够建立较好质量的地图,为AGV 运动提供准确数据。选手还要完成PLC 与相机和协作机器人的通讯,通过协作机器人编程,借助AGV 导航,把半成品基座运到装配台上,待工业机器人完成装配后再把成品运到仓库。选手要使用2D 相机多次进行识别定位,以便获得精确的位置数据。
3.3.3 工业机器人人工智能技术生产应用
根据任务书要求,通过人工智能技术赋能,在工业机器人分拣与装配单元中,通过操作3D 视觉系统软件,完成3D 相机的调试、标定,以及基于深度学习的工件识别;完成工业机器人基于3D 视觉的工件无序智能抓取;通过调用规划软件,完成工件的简单装配。

图5 散乱的螺钉(左)和螺帽(右)

图6 完成螺帽装配的基座

图7 待装配端盖和螺钉
该比赛任务主要考核选手使用3D 智能相机和工业机器人的熟练程度。
首先,选手要对3D 智能相机的参数进行设置,完成后进行相机标定,接着要采集图片,标注图片,进行深度学习。这些操作直接关系到相机识别的准确程度,虽然步骤比较多,但是难度不大,选手要认真仔细,防止因小失大。这些准备工作完成以后,选手要利用相机的图形编辑软件完成目标零件的识别,为后面工业机器人的抓取提供数据。
当3D 相机完成视觉识别后,工业机器人将进行分拣抓取。选手要通过电脑软件在线编程,让工业机器人完成零件(大螺帽、大螺钉或小螺帽、小螺钉)的抓取和简单装配。为了确保装配可靠,平台设置了二次定位装置。
在装配过程中,要用到大夹爪(取大螺帽、大螺钉)、小夹爪(取小螺帽、小螺钉)、直口夹爪(取基座)和电钻(装螺钉),软件编程过程中要防止用错,加上任务中需要示教的点数比较多,也要注意标记,以免错乱导致发生碰撞。
4 机器人人工智能技术综合应用
根据任务书要求,通过综合操作、编程和调试,对工业机器人、移动操作臂及智能机器人等单元进行智能化赋能和综合应用,在“机器人人工智能技术应用”技术平台上,实现典型智能制造工业场景的完整工艺流程,综合体现机器人智能感知、自动决策、自主执行、互联互通、深度学习、人机交互、自我管理等人工智能技术要素及其职业技能。
该任务属于系统综合调试环节,首先智能机器人上料(倾倒散乱螺钉螺帽),AGV和协作机器人上料(待装配基座),接着工业机器人分拣装配,AGV 和协作机器人将成品运至仓库,智能机器人巡检……整个过程中,用了2D 相机、3D相机、智能机器人、工业机器人、协作机器人和AGV 等设备,还有PLC 和触摸屏等方面的知识,重点考察选手的综合实力,如果前面任务不能完成,这个环节失分将会较多。
机器人人工智能技术应用赛项,线上考核时间60 分钟,线下考核时间210 分钟,一方面考核选手对各项设备应用的掌握能力,另一方面考核选手技能掌握的熟练程度,同时也对选手团队成员之间的分工和协作能力提出了较高要求。无论是职工组还是学生组参赛选手,不光要有扎实的专业知识技能基础,还要深入理解比赛技术文件,重点把握赛前训练强度和节奏,科学合理地进行团队协作。做到这些,选手才可能充分发挥技能水平,在比赛中脱颖而出。
5 结束语
全国人工智能应用技术技能“大赛机器人人工智能技术应用”赛项,率先将人工智能应用技术和机器人技术有效融合,围绕智能制造工业技术,依托机器人在智能制造行业应用的真实场景业务需求,考查选手对人工智能技术综合应用于机器人为载体的复杂场景能力。同时大赛塑造了机器人人工智能技术的典型范例,展示了人工智能关键技术在工业生产的应用,借以加深参赛选手对人工智能技术应用于机器人的认知,加快培养本领域高素质知识型、复合型、技能型人才。
猜你喜欢
创伤外科杂志(2022年7期)2022-11-21
发明与创新·职业教育(2020年11期)2020-12-06
金桥(2020年9期)2020-10-27
金桥(2020年9期)2020-10-27
保健与生活(2020年1期)2020-05-07
科教新报(2019年45期)2019-10-21
求知导刊(2019年18期)2019-10-18
人大建设(2019年4期)2019-07-13
考试周刊(2018年97期)2018-11-14
读者(2017年14期)2017-06-27
