
基于STM32单片机的微型磁悬浮装置的设计
2021-07-16 09:23杜明昊郝凤琦赵晓杰
现代电子技术 2021年14期
杜明昊,郝凤琦,赵晓杰
(齐鲁工业大学(山东省科学院)山东省计算中心(国家超级计算济南中心)山东省计算机网络重点实验室,山东 济南 250014)
随着科技的日益发展,磁悬浮技术逐渐应用于运输、工业等领域,此外,微型磁悬浮由于其小巧且科技感和视觉冲击较强,也经常被应用于办公室、公司前台、高级酒店、私人家居、珠宝鉴赏店、学校科技馆等民生日常领域。1842年,英国数学家山姆·恩绍(Samuel Earnshaw)发表了著名的恩绍大定理(Earnshaw′s theorem),通过数学证明了单靠宏观的静态古典磁力,稳定的磁悬浮不可能实现[1]。相比纯模拟的元器件和单闭环的控制,本文借助单片机设计双闭环串级PID控制器[2],输出数字信号通过驱动单元控制电磁线圈产生动态磁场与原本的静态永磁体产生的磁场叠加,动态调节,能够灵活控制浮子稳定悬浮。
1 磁悬浮装置的硬件设计
1.1 整体系统介绍
该微型磁悬浮装置是由电源单元、主控单元、驱动单元、检测单元、线圈以及永磁体组成,其整体框架如图1所示。

图1 磁悬浮装置的整体框架
1.2 电磁线圈的驱动单元
磁悬浮装置的单个电磁线圈的驱动单元硬件电路原理图如图2所示。

图2 电磁线圈的驱动单元
电磁线圈正常工作时,所需电流可达到安培级别,单片机I/O口无法输出大电流。本文使用N沟道场效应管和P沟道场效应管搭建H全桥驱动电路[3]。通过光耦隔离芯片[4],一方面将控制端与大电流驱动端进行电气隔离,保护控制器;另一方面提高了场效应管的栅极控制信号的电压值,进而提高场效应管的开通、关断能力。
1.3 磁通量测量单元
本文借助2个霍尔传感器[7]测量浮子位置信息,使用基准电压芯片为霍尔传感器提供标准电压,使用轨到轨运算放大器[5]芯片通过差分放大电路将霍尔传感器的输出值放大,再经过硬件无源滤波电路滤除杂波,连接至单片机ADC[6]模拟信号采集引脚。磁通量测量电路原理图如图3所示。

图3 磁通量测量单元
2 磁悬浮装置的控制设计
2.1 浮子姿态位置
磁悬浮装置平面结构示意图如图4所示。磁通量测量单元里的2个相互垂直的霍尔元件,可以测量出浮子的位置信息,以永磁体的中心为原点,建立直角坐标系,霍尔h1测量x轴方向上的浮子磁通量信息,霍尔h2测量y轴方向上的浮子磁通量信息[7]。因此,通过STM32单片机片内ADC外设得到磁通量值,进行数学坐标模型化后,可以得到浮子的水平位置。

图4 磁悬浮装置平面结构示意图
2.2 双闭环串级PID控制
浮子稳定悬浮时,所需的悬浮斥力主要由永磁体提供,x轴的2个电磁线圈以及y轴的2个电磁线圈产生的磁力主要用以水平内动态调节浮子平衡,使其维持在磁场正中心。理想情况下,浮子处于磁场正中心时,电磁线圈处于关断状态,同一轴上的2个电磁线圈功率消耗之差为0。外环中的主控制器通过同轴电磁线圈的功耗之差进行负反馈,进而输出纠偏量,对原来内环初始的设定值进行修正。内环中的副控制器通过浮子的直角坐标值进行反馈,进而输出对应的数字占空比信号给驱动单元,控制电磁线圈动作。本文在经典的串级控制方法上做了一小步改变,在单个控制周期中,主控制器输出一个相对副控制器初始设定值很小的纠偏量,然后叠加副控制器最初的设定值,得到一个新的值作为新变量,所述新变量再作为副控制器的设定值,其中,纠偏量是由外环数字PID增量型输出给定,所述新设定值是内环数字PID位置型的设定值[8⁃12]。微型磁悬浮装置x轴的双闭环串级PID控制流程如图5所示。
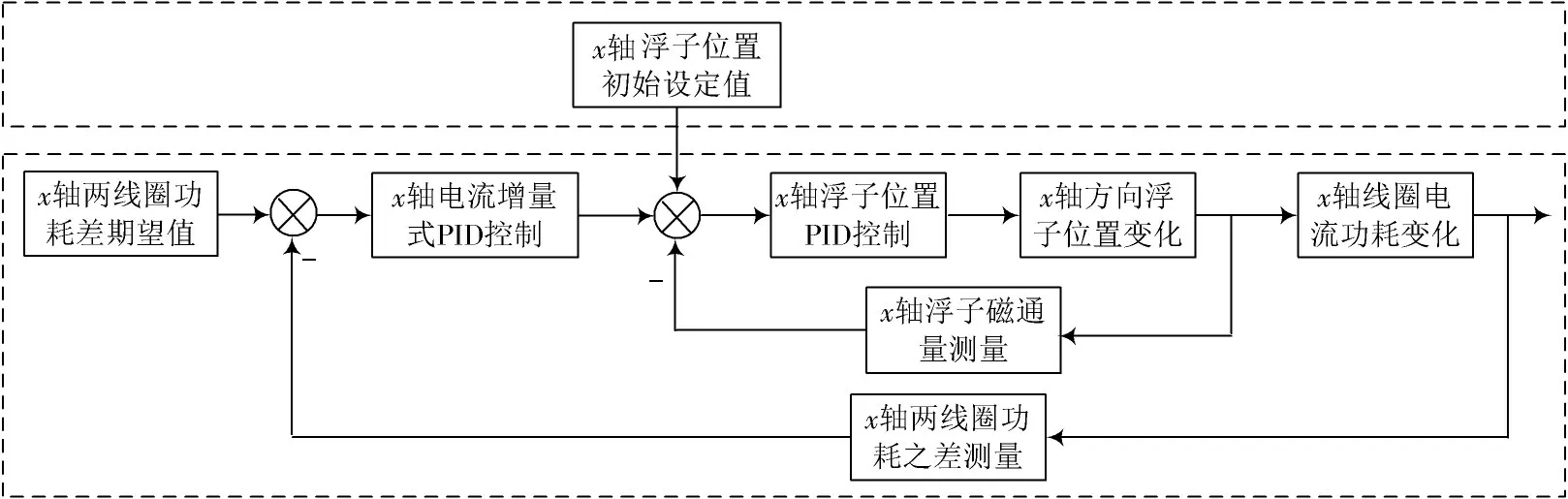
图5 x轴的双闭环串级PID控制框图
2.3 软件流程
本文选用STM32F103C8T6单片机作为主控制器,通过MDK⁃Keil5 IDE软件进行程序设计和调试见图6和图7。
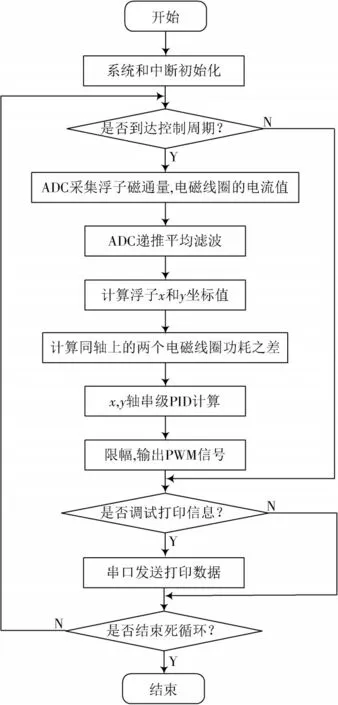
图6 主程序流程图
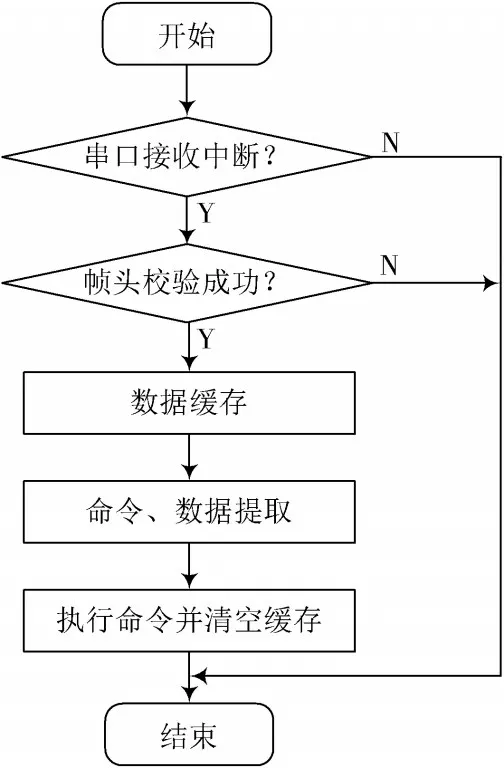
图7串口中断接收程序
图6 和图7分别为主程序和串口中断接收程序两大部分。在中断处理时,通过串口中断接收上位机发送来的命令和数据,并缓存到全局变量环形数组区,并使用定时器中断设计15 ms控制周期定时。
3 磁悬浮装置的实验测试及结果分析
3.1 上位机调试助手
为方便调试,可使用上位机串口助手软件,与STM32单片机进行串口通信,通过USB⁃TTL转接设备实现二者的物理连接。通过调试助手可以打印显示出当前浮子位置信息,驱动单元的输入PWM信号数值,可以改写STM32单片机全局变量以实时改变PID参数值。
3.2 PID参数设置
PID参数的设置是比较关键的一步。首先,断开外环,保持内环,内环初始设定值可以粗略给定,用手将浮子置于平衡处,通过单片机ADC外设读取得到此时的浮子位置信息量,作为内环的初始设定值。参数积分I与微分D置为0,调整参数比例P,直至感受到电磁线圈的束缚力,停止调节参数P,开始调整微分D,消去抖动,内环可以不使用参数积分I。调整完内环参数后,可以实现悬浮。为了提高系统适应性,引入外环,外环期望值可以设置为0,也可以适当增大。最后根据线圈电流能耗和实际悬浮情况调试外环参数[13]。
3.3 悬浮测试
调试完PID参数后,开始悬浮测试,该磁悬浮装置的底座实物图如图8所示。本文使用直径25 mm、厚度10 ms的圆柱体钕铁硼磁铁作为永磁体,以及直径3 cm厚度5 mm的圆柱体钕铁硼磁铁作为浮子。

图8 磁悬浮装置的底座实物图
将装置底座置于水平面的桌子上,人工制造干扰因素:
1)外界碰撞扰动:小功率电风扇吹拂浮子进行模拟;
2)室内温度变化:使用空调制冷和热风枪加热模拟室内温差变化。
如图9所示,小功率风扇是由720空心杯无刷电机和长55 mm螺旋桨组合而成。测试时,螺旋桨反向安装使用,3.7 V额定直流电压供电,水平移动与磁悬浮装置的距离。测试浮子悬浮状态如表1所示。

图9 小功率风扇

表1 与风扇不同距离下的浮子悬浮状态 cm
测试温度变化时,在密闭的狭小室间内,将空调制冷至16℃,悬浮装置运行测试3 h;使用热风枪连续均匀吹拂加热悬浮装置至40℃左右,悬浮装置运行测试3 h。在室内温度变化下,浮子能够很好地保持稳定运行。
3.4 实验结果分析
上述模拟扰动具有一定误差,但是通过表1的记录可知,该微型磁悬浮装置具有一定的抗干扰能力,在适当的外界干扰时,浮子可以快速保持平衡。在室内温差变化扰动下,霍尔传感器由于温漂导致输出数值发生变化,故使得内环的反馈值发生变化。磁悬浮装置通过外环PID输出纠偏量叠加到内环的初始设定值,得到一个新的内环设定值,新的内环设定值和内环反馈值之间的偏差值仍然相对恒定,输出的纠偏量抵消了霍尔温漂造成的干扰,所以系统能够调控自适应,浮子可以长时间稳定悬浮。
4 结 语
本文从软、硬件两方面研究设计一种以STM32单片机控制器为核心的微型磁悬浮装置。随着智能控制、NLP自然语言处理和3D打印技术等各学科的发展以及国民精神素养的显著提升,未来,智能磁悬浮3D工艺品将会备受瞩目,进入广大居民日常生活中[14]。
注:本文通讯作者为郝凤琦。
猜你喜欢
包装工程(2023年16期)2023-08-25
小猕猴智力画刊(2022年4期)2022-05-23
小学科学(学生版)(2021年4期)2021-07-23
船舶力学(2021年3期)2021-03-29
中国惯性技术学报(2018年4期)2018-11-08
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
浙江大学学报(工学版)(2016年2期)2016-06-05
腹腔镜外科杂志(2016年12期)2016-06-01
腹腔镜外科杂志(2016年11期)2016-06-01
