边缘计算架构下配电台区虚拟电站控制策略
2021-07-15 11:00刘东奇曾祥君王耀南
电工技术学报 2021年13期
刘东奇 曾祥君 王耀南
(1. 长沙理工大学电气与信息工程学院 长沙 410114 2. 机器人视觉感知与控制技术国家工程实验室 长沙 410082)
0 引言
“智慧城市”(Smart City)建设已成为当今国际社会城市发展的主要目标,其信息化、智能化和弹性化必将成为未来城市发展的主要趋势[1-2]。作为智慧城市能源配置的基础平台与综合能源枢纽的核心载体,配电网是保证城市电力供应、提升城市能源供给弹性的关键所在。
随着国家“碳达峰、碳中和”战略目标的推进,未来分布式能源(Distributed Generator, DG)和电动汽车将广泛接入配电网,逐步构成以新能源为主导的深度低碳新型电力系统,给传统电网的稳定控制带来挑战。为了平抑分布式电源和电动汽车负荷的随机性带来的能量供需不平衡,一些研究提出采用储能系统快速平衡系统中的不平衡功率,提高电网安全稳定性[3-6]。然而,城市配电网台区数量极大,随着分布式能源等在低压台区中的渗透率不断攀升,在每个台区部署相当容量的储能系统是不现实的,所付出的成本将难以接受。而且,部署储能系统不仅代价高昂,一旦管理失当,极易引发火灾、环境污染等次生灾害。一些研究提出,可以利用电动汽车作为有功功率调节、辅助电网进行削峰填谷的工具[7-9],然而,电动汽车电池极其昂贵,往往采用动力性较磷酸铁锂更好的三元锂电池,如长期使其深度充放电,对电池寿命影响较大,用户难以接受。因此,如何经济、高效地消纳广泛接入配电网的分布式能源,是配电网发展过程中亟需解决的一大问题。
同时,随着大量的DG、电动汽车等广泛接入电网,产生了巨大的信息流量,通信数据量将达泽字节(ZB)级别[10]。电力系统传统的集中式调度模式已经不能高效处理这些DG、电动汽车等产生的数据,传统的电网调控方式和信息处理模式将难以为继。因此,边缘计算[11-12]模式应运而生,边缘计算是针对集中式处理的云计算模式演化出来的新型计算模式[13],它的基本理念是通过将部分计算任务迁移到接近数据源的计算资源上就地运行处理,解决云计算资源不足的问题[14]。
在配电网中,智能配变终端(Distribution Transformer supervisory Terminal Unit, TTU)是实现边缘计算的具体载体,它是一种新型的配电终端设备[15]。TTU不仅监测配电变压器电压、电流、功率等物理量,而且它本身具有一定的计算能力,相当于一个就地进行数据汇聚、清洗、处理的平台,并且能够实现一些就地的控制功能。通过将TTU部署在380V低压配电台区,就可以利用该终端的边缘计算能力实现对台区内DG、电动汽车和负荷等的有效管理。
为此,本文提出了一种边缘计算架构下含高比例DG和电动汽车的配电网台区运行的模式和相应的控制方法。 提出通过TTU边缘计算组织,由DG、电动汽车和负荷构成的虚拟电站的整体架构。分析了该架构下虚拟电站的运行模式,并提出基于控制电动汽车并网工况,即控制电动汽车充电、空闲及无功补偿的并网状态,来调节本地电网有功功率(吸收或者发出)和电压的虚拟电站控制方法。最后,通过构造仿真算例对所提方法进行测试,验证其有效性。
1 虚拟电站的架构与运行模式
本文提出的虚拟电站架构如图1所示。图中的智能配变终端TTU部署于10kV台区的配电站室、箱变或杆变上的配电变压器低压侧。利用TTU的边缘计算能力,在以边缘计算为核心的数据处理计算框架的组织下,将各台区变压器所辖的电力台区内聚合的所有负荷、电动汽车及采用最大功率跟踪(Maximum Power Point Tracking, MPPT)策略的分布式能源DG,整体上等效为一个广义的负荷(或源),这个广义的负荷(源)与TTU之间构成了一个两级的通信架构,即物联网中广义的边—端架构。所以本文所提的虚拟电站实际上就是由边缘计算组织,由DG、电动汽车和负荷构成的“虚拟的电站(Virtual Power Station, VPS)”。 它与调度主站一起构成了云—边—端三层式架构。其中,处于中层的边缘计算为上层提供轻量化的数据模型,并向下建立数字物理空间信息节点组织、映射、通信、控制架构。需要特别说明的是,这里的边缘计算并不是某种特定的计算方法,而是一种相对云计算而言的新型计算模式。
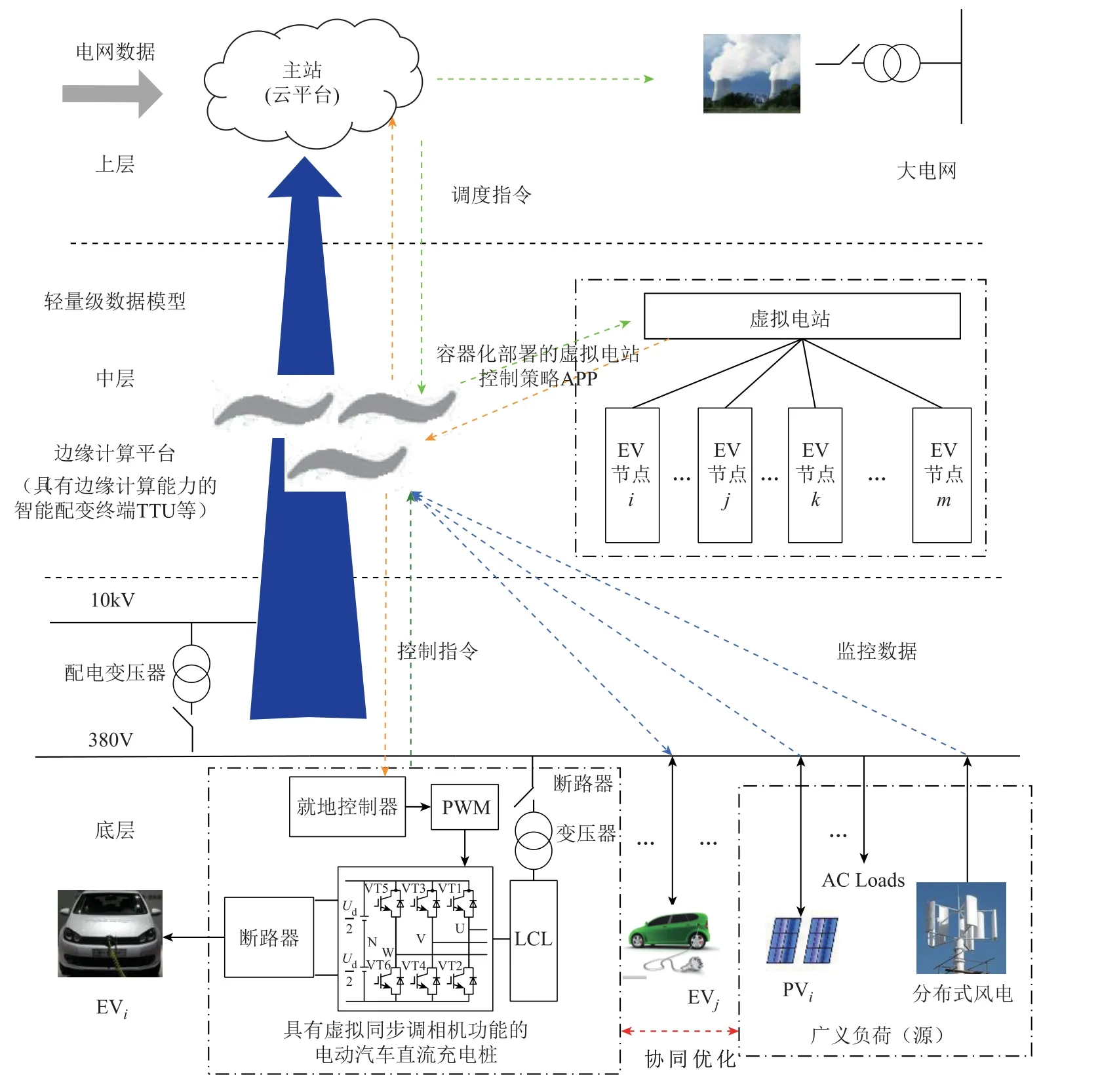
图1 本文所提出的虚拟电站架构Fig.1 Architecture of the proposed virtual power station
作为边缘计算的物理载体、虚拟电站的“核心大脑”,TTU在整个云—边—端三层式架构占据重要的地位。在某些场景中,类似TTU这种面向终端部署、提供边缘计算平台的设备也被称为“边缘计算网关”。边缘计算网关允许用户在其应用层部署应用程序,从而扩展网络边缘侧的计算和业务能力。边缘计算网关的软件系统由一个主操作系统和多个容器子系统组成[16]。容器系统是一个类似于“虚拟机”的虚拟运行环境,在主操作系统上加载运行。应用程序(APP)在容器系统中运行,实际上,容器系统相当于一个“沙盒系统”,它只能访问沙盒环境中提供的资源,而这个资源由主操作系统进行分配和控制,避免某个APP无限占用边缘计算网关的所有计算资源的情况。由于容器之间的完全隔离,即使存在可能的漏洞,受影响的也只是容器内部的沙盒环境,容器外部系统不受影响,从而提高了整体的安全性能。通过这种模式,在电力边缘计算网关——TTU上可定义多个功能APP,同时实现计量、分析、控制等功能,并且各功能之间逻辑上完全隔离,实现对DG、电动汽车、负荷以及下属各设备等进行统一管理。
从控制逻辑上看,本文所述虚拟电站实质上是一个物联网环境下的网络控制系统。物联网控制系统大都由数量庞大的子系统组成,由于这种系统过复杂,描述这种物联网系统模型通用的方法是使用Petri网,利用该方法,一个事件的状态转移依赖于其他事件的过程可以被很好地描述出来。它的主要优点是使用Petri网建立的模型可以同时被用来分析行为属性、评估系统性能、构建和控制系统结构[17]。将现场执行数据采样的系统定义为“采集源点”,用S表示。Si(i=1, 2,…,n)表示具体的数据来源;将采样数据上行至边缘计算网关应用层的通道定义为“传输通道”,用Ct表示;将边缘计算网关中执行决策的应用App定义为“决策点”,用PD表示;将边缘计算网关中应用App向下发出的控制指令,下达各底层功率逆变器的通道定义为“控制通道”,用Cm表示;而各逆变器及与之连接的各设备、DG、负荷、电动汽车等抽象为“被控对象”,用O表示。此外,用t、ti(i=1, 2,…,n)表示瞬时变迁。基于以上定义,则整个物联网控制系统可以用Petri网描述如图2所示。
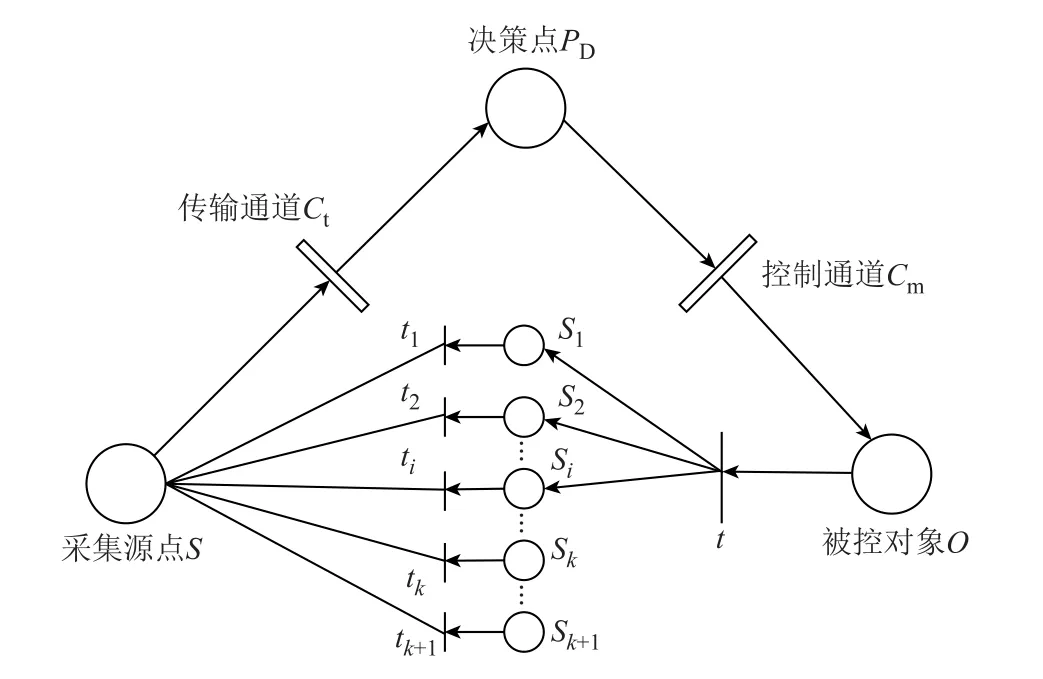
图2 虚拟电站物联网控制系统Petri网模型Fig.2 Petri net model of virtual power station internet of things control system
2 虚拟电站的控制方法
如上文所述,虚拟电站中包含了大量的分布式能源、电动汽车等独立分散的发电和用电单元。由于电网的规模非常庞大,这些分布式能源接入电网的单元将产生高达泽字节(ZB)级别巨大的信息流量,如果这些数据流量都由传统的主站调度中心进行处理,那么将在通信环节产生巨大的延迟,严重影响电网系统的正常运行。为了解决这个问题,本文提出基于边缘计算信息处理架构的虚拟电站控制方法,利用TTU的边缘计算能力,向下对分布式发电单元和电动汽车进行就地化的控制,向上提供轻量化的台区运行数据,便于主站调度中心进行管理。
在具有边缘计算能力的TTU组织下,本文所述的虚拟电站的控制策略总体描述如下:
1)台区内分布式能源以MPPT策略发电,分布式能源发出的电扣除本台区含电动汽车在内的所有负荷消耗的有功功率,余电通过台区变压器向外输送。此时,台区向外等效为一个发电厂,向外输送有功功率。
2)当分布式能源发出的电不足以满足本地负荷需求时,台区向外等效为一个负荷,从外部吸收有功功率。
3)TTU将本台区作为源或者荷向外发出或者吸收的有功功率大小上报调度主站,调度主站根据TTU上报数据修正调度功率值。
4)台区向外等效为发电厂还是负荷,很大程度上取决于电动汽车的并网工况。通过优化电动汽车的充电时段和充电数量,使虚拟电站在源与荷之间切换,实现本台区用电(发电)的最优经济性。
5)台区内的无功功率由处于空闲态的电动汽车来保持平衡。运用虚拟同步机技术,将电动汽车控制为虚拟的同步调相机,可实现对本地电压的支撑。
根据所述的虚拟电站运行模式,虚拟电站的控制问题,可以进一步简化为对该电站内电动汽车的并网工况进行控制的问题。因此,实现虚拟电站控制的第一步为,对辖区内电动汽车进行划分,以确定哪些车可用于有功调控,哪些车用于无功调控。
2.1 虚拟电站的有功功率调控
设每台电动汽车充电桩配置手动/自动选项开关,将用于有功调控的电动汽车定义如下:当且仅当前述的配置开关打到自动选项,电动汽车的剩余电量50%≤SOC<100%时,电动汽车可参与于有功调控。剩余电量低于20%的电动汽车被认为是需要立即充电的刚性负荷需求。
引入BOOL变量AT来描述是否允许电动汽车参与有功调控,即

式中,SOCi%为第i辆电动汽车的剩余电量,计算公式为
式中,Bi为第i辆电动汽车的电池容量;Ei,k为第i辆电动汽车在k时段的电量,其计算公式为

式中,db为电池自放电系数;ηc为充电效率;Pi,k-1为第i辆电动汽车在k-1时刻的充电功率;Δt为从t-1时刻到t时刻的时长。
对于每台AT=1的电动汽车,调控的指令为一个电动汽车充电使能的控制信号,该信号决定电动汽车处于空闲还是充电状态。而对于整个虚拟电站而言,调控的指令则是使能指令覆盖的电动汽车占本台区参与有功调控的电动汽车总数的百分比,该信号决定了投入调控的电动汽车的台数。
有功调控的目标为:第一,尽量消纳本台区DG发出的有功。这意味着电动汽车的负荷容量应该依据DG发电容量与台区负荷容量进行配置。第二,从大电网宏观层面上,转移负荷尖峰。这意味着在某些时候,台区内的有功平衡不再是虚拟电站控制追求的目标,此时应尽量使虚拟电站对外表现为源,来满足高峰负荷。
可以看出,这两个控制目标之间并不是完全相容的。将控制目标描述为
式中,m、n为权重系数,由调度员对两个有功调控目标相互间的优先关系决定;优化变量为Ena(T)%,其为T时刻充电使能指令覆盖的电动汽车占本台区参与有功调控的电动汽车总数的百分比,取值空间为[0, 100%];T代表不同的小时,取每小时0分1秒的时间点为控制量计算的时间断面,取值范围为[0, 23];PTA为T时刻TTU采集到的变压器二次侧有功功率的测量值;SN为变压器额定容量;N为参与有功调控的电动汽车(充电桩)总数;PEV为电动汽车充电桩的额定充电功率;γ(T)为电价系数,对应前一天T时刻PEV功率大小的充电电价;为该台区前一天24hPEV对应的电动汽车充电电价的平均值,且有

可见,式(1)描述的优化问题,实际上由两部分组成:前一部分反映了台区内部的有功功率平衡;后一部分是通过引入电价系数,反映电网削峰填谷的需求。考虑到边缘计算网关的计算资源与能力,对所提出的优化问题采用全局寻优性能良好的混沌优化算法进行求解。采用混沌优化算法的主要原因是混沌有丰富的时空动态,尤其是混沌的遍历性特点,使其可以作为搜索过程中避免陷入局部极小的一种优化机制。解法的伪代码如下所示。
Algorithm:Chaotic(X,N1,N2,L,U,Q) 参数描述: N1, 一次迭代次数; N2, 二次迭代次数; L, 取值左边界; U, 取值右边界; Q, 二次载波算子 1: 初始化:X=rand; N1, N2; 2: HX(1)=sin(2/X); %混沌映射 3: for k=1 to N1 do %一次搜索 4: x(k)=L+(U-L)*abs(HX(k)); 7: 适应值评估: f(x(k)) 8: if f(x(k)) < fmin do 9: fmin=f(x(k)); 10: xmin=x(k); 11: end if 12: HX(k+1)=sin(2/hx(k)); 13: end for 14: Q=1/(2+exp(0.004*k)); 15: LC=xmin-Q*(U-L); %左边界调整 16: UC=xmin+Q*(U-L); %右边界调整 17: for k=N1 to N1+N2 do %二次搜索 18: x(k)=LC+(UC-LC)*abs(hx(k)); 19: 适应值评估: f(x(k)) 20: if f(x(k)) < fmin do 21: fmin=f(x(k)); 22: xmin=x(k); 23: end if 24: HX (k+1)=sin(2/hx(k)); 25: end for 26: 输出最优解
在边缘计算网关处对所提出的优化问题进行计算和求解。可以得到每小时的Ena(T)%控制参数,继而向台区内一定比例的电动汽车发出充电使能控制指令,使虚拟电站在保证内部电力供需平衡的同时,也能辅助本地电网平抑峰谷负荷差。
2.2 虚拟电站的无功功率调控
对处于空闲态的电动汽车,如果它的并网逆变器采用三相全控电压型逆变电路的话,那么就可以采用虚拟同步机技术[18-20],将其等效地控制为虚拟的同步调相机,用以支撑本地电网电压。虚拟同步调相机的原理简要描述如下。理想三相无阻尼绕组隐极式同步发电机的基本结构如图3所示。
图3 理想三相隐极式同步发电机基本结构Fig.3 The basic structure of ideal three-phase stealt-pole synchronous generator
假设定子绕组三相对称,且不计磁路饱和影响,同时为了分析方便,假设:①定子绕组之间互感M=0;②转子绕组励磁电流if恒定。此时,如果将并网逆变器PCC处的LC滤波器看作是这台同步发电机的定子绕组,将滤波器的阻抗Ls、Rs看作是该定子绕组的电感和电阻,将滤波电容上电压降Va、Vb、Vc看作是同步发电机定子端电压,将逆变器由PWM输出的电压ea、eb、ec在一个开关周期内的平均值等效看作定子侧的感应电动势,则一台三相全控电压型逆变器可以在数学上被构造等效为一台同步发电机,其物理规律与数学逻辑满足
上述公式分别为符合假设条件定义的同步发电机的电压方程、运动方程、转矩方程和功率方程。
根据电机的可逆性可知,同步发电机本质上也可以认为是一台同步电动机,只是功率(功角)的正方向定义不同。因此,可以将电动汽车充电桩控制为虚拟的挂在电网上空载运行的同步电动机(这种同步电动机又叫同步调相机),则可以利用同步电动机的调整特性,实现对本地电网无功功率的就地补偿。
将电动汽车充电桩控制为同步调相机的控制框图如图4所示。该控制结构在文献[19]所述具有虚拟同步发电机特性的电动汽车V2G充电桩控制结构的基础上,基于电机的可逆性原理演化而来。需要特别说明的是,应用本文方法的充电桩必须采用三相全控型电力电子开关整流器,该类型的充电桩一般用在电动汽车采用直流充电(快充)模式的场合。
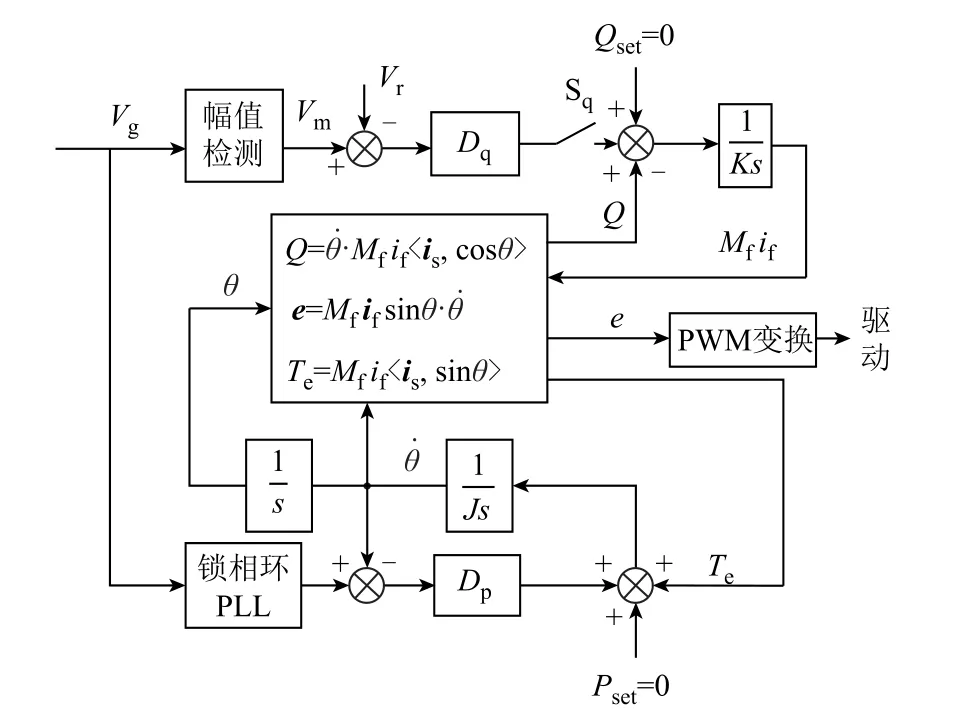
图4 虚拟同步调相机控制框图Fig.4 Block diagram of virtual synchronous compensator
图4中,Vg为并网逆变器网侧经电压互感器检测得到的电网电压值,通过一个幅值检测单元,得到电网电压幅值的有效值Vm。Vr是设定的额定参考电压幅值(有效值)。Dp和Dq分别为频率环和电压环的下垂控制系数,它们的整定规则参考文献[19]所述方法。当电动汽车处于空闲态时,有功功率和无功功率的设定值都等于0,当逆变器收到TTU发来的台区内无功功率平衡的使能信号时,开关Sq闭合,此时电动汽车与充电桩整体被控制等效为虚拟的同步调相机,对本地电压进行就地支撑,提供无功补偿。
3 算例分析
以长沙理工大学真型配电网实验室为例进行分析,其具有多分段多联络的特点,通过改变母线联络方式可实现环网、辐射等多种典型配电网网架结构。配电网实验室具有两个容量为3 250kV·A的10kV配电变压器台区,每个10kV台区通过10条出线连到10个400V的配电台区。为实现台区的精细化管理,对台区进行了智能化改造,在配电变压器低压侧部署了智能配变终端(TTU),如图5所示。

图5 配电变压器二次侧部署的配变监测终端Fig.5 Distribution transformer monitoring terminal
该10kV配电网变压器台区内接入了分布式发电设备(小型垂直轴风力发电机和屋顶光伏)和电动汽车,设台区内含垂直轴风力发电机组 2 200kW,太阳能屋顶光伏500kW,设一天24h 10kV配电变压器二次侧智能配变终端(TTU)采集到的变压器二次侧有功功率的测量值PTA(未投入电动汽车充电桩时)见表1。电动汽车充电桩额定充电功率PEV=3kW,对应电动汽车额定充电功率的某地电动汽车充电的分时电价见表2。
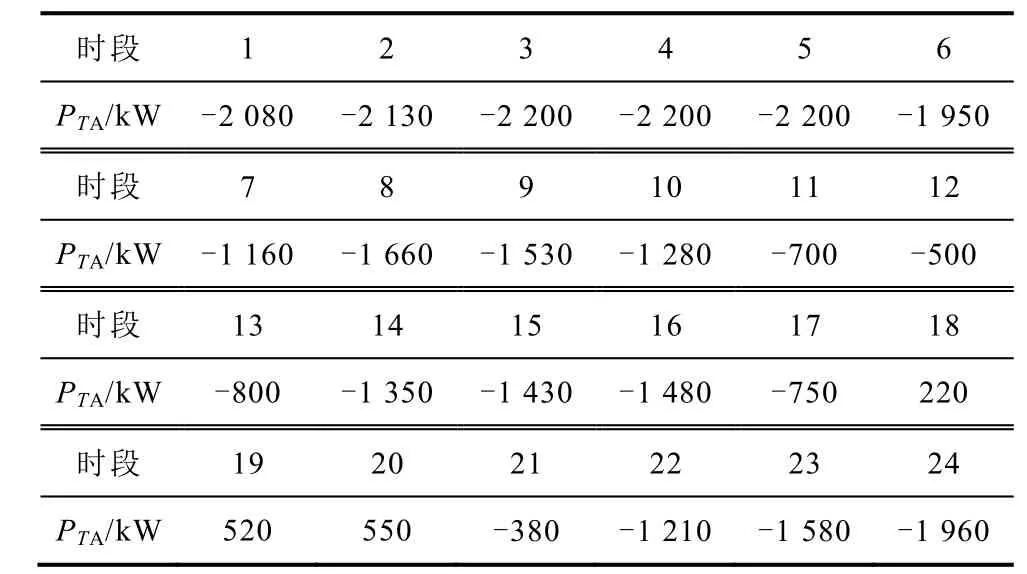
表1 TTU采集到的变压器二次侧有功功率PTA Tab.1 PTA collected by TTU
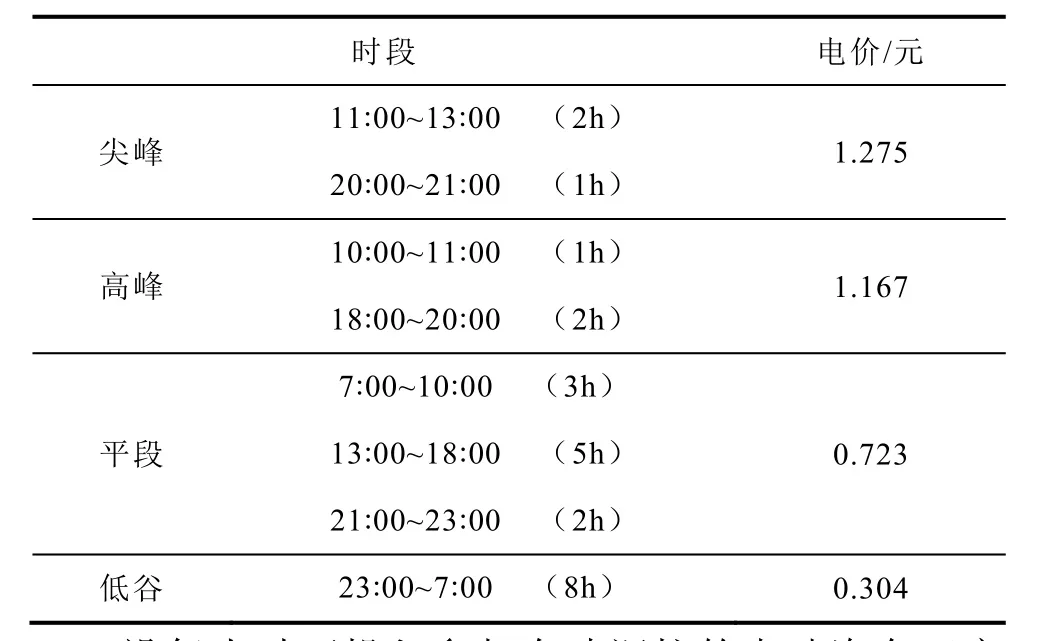
表2 某地电动汽车充电分时电价Tab.2 TOU price of EV charging
设每小时可投入参与有功调控的电动汽车(充电桩)总数N=300辆,根据式(1)所描述的优化目标,采用混沌优化算法,权重系数取m=n=0.5,可得电动汽车充电调控结果见表3。表中,ΣPEV为充 电使能指令覆盖的电动汽车充电功率的总和。
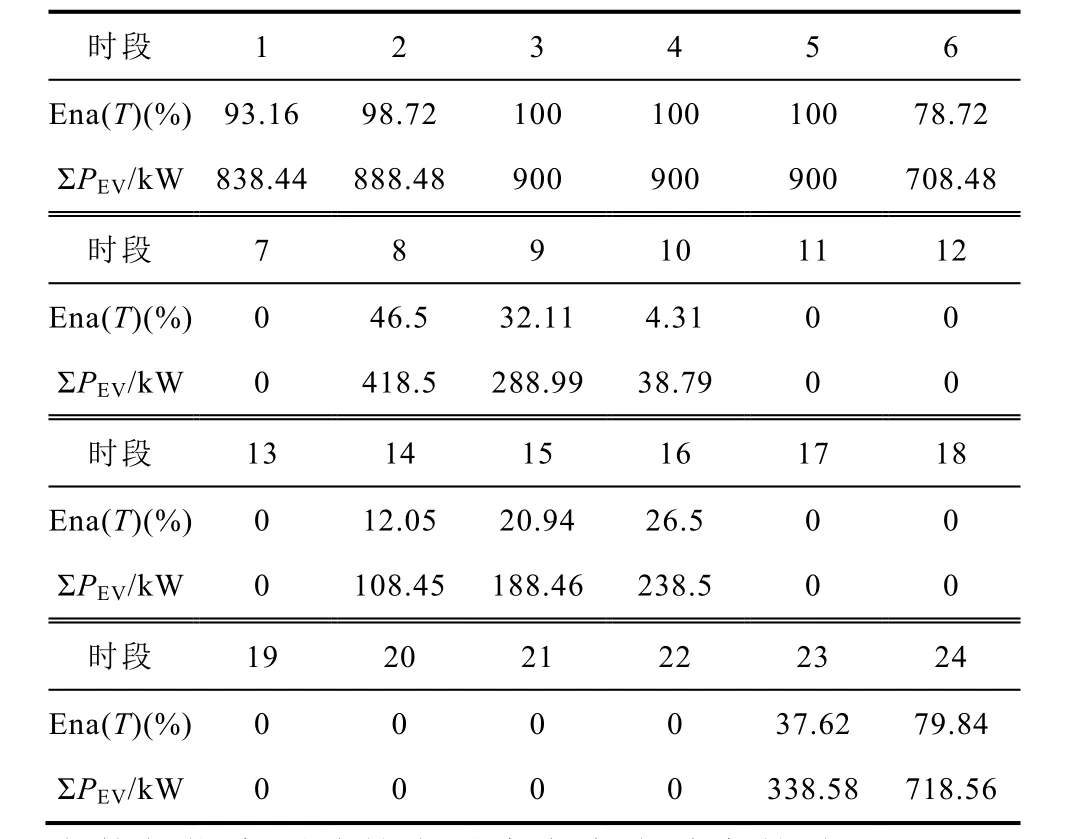
表3 电动汽车充电调控结果Tab.3 Regulation results of orderly charging of EVs
图6将电动汽车充电功率的总和与未投入电动汽车充电桩时智能配变终端TTU采集到的变压器二次侧有功功率的测量值PTA进行了对照,图中矩形框表示电动汽车的充电功率,直方柱表示未投入电动汽车充电桩时台区变压器二次侧有功功率,线条是两者功率之和。可以看到,所提出的优化控制模型基本达到了设计目标,即在尽量消纳本台区DG发出有功的同时,在峰值负荷期减少充电功率,使虚拟电站的DG满足高峰负荷的需求。

图6 各时刻PTA与相应调控的ΣPEVFig.6 Each moment of PTA and the corresponding ΣPEV
作为对比,图7展示了0~300辆电动汽车无序充电(随机接入充电)对虚拟电站发电功率的影响。其中,各时刻接入电网的电动汽车的数量采用蒙特 卡洛模拟的方式随机产生。可以看到,电动汽车无序充电显著拉大了峰谷差,降低了台区虚拟电站运行的经济性。
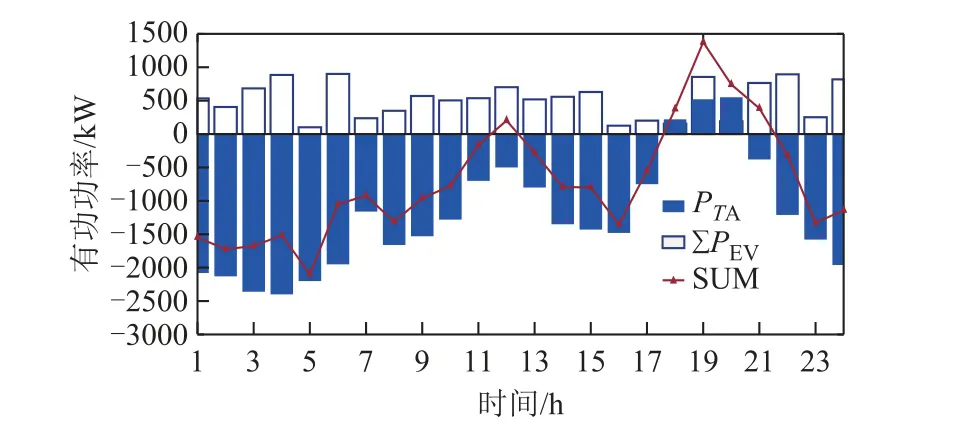
图7 各时刻PTA与无序充电下的ΣPEVFig.7 PTA and the disordered charging power ΣPEV
除了参与有功调控的电动汽车以外,剩下的处于空闲态的电动汽车,可将其控制为虚拟的同步调相机,使其向电网提供电压支撑。虚拟同步调相机的参数为:频率环阻尼系数Dp=50.66,电压环下垂系数Dq=3 223,频率环惯性时间常数Tf=0.002,电压环惯性时间常数Tv=0.02。
假设电网电压发生跌落,如图8所示,电压幅值在T=1s时跌落了0.01(pu),则虚拟同步调相机无功功率调节的效果如图9所示,此时虚拟同步调相机处于过励磁运行状态,电动汽车发出感性的无功功率以满足电网的需要。

图8 电压幅值发生跌落Fig.8 Voltage sag occurs
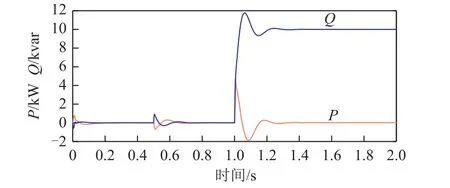
图9 发生电网电压跌落时电动汽车的无功功率Fig.9 Reactive power output of electric vehicles when grid voltage sag occurs
假设电网电压上升,如图10所示,电压幅值在T=1s时上升了0.01(pu),则虚拟同步调相机无功功率调节的效果如图11所示。此时虚拟同步调相机处于欠励磁运行状态,电动汽车发出容性的无功功率以满足电网的需要。
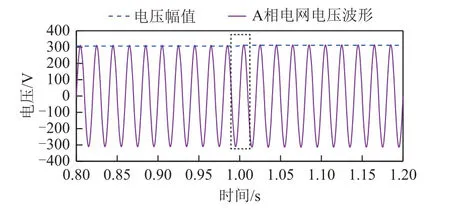
图10 电压幅值上升Fig.10 The voltage amplitude increases
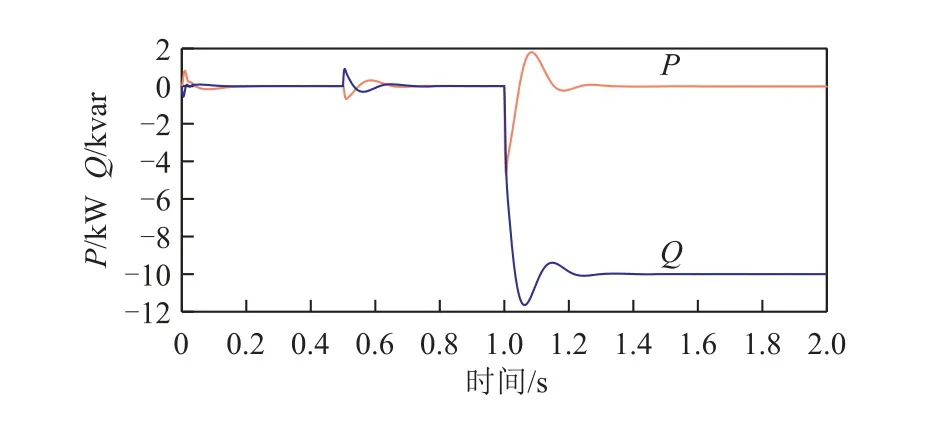
图11 发生电网电压上升时电动汽车的无功功率Fig.11 Reactive power output of electric vehicles when grid voltage amplitude increases
4 结论
本文提出了一种边缘计算架构下含高比例DG和电动汽车的配电网台区运行的新模式和相应的控制方法。提出通过TTU边缘计算组织,由DG、电动汽车和负荷构成的虚拟电站的整体架构,并提出了该架构下虚拟电站的运行模式:基于混沌优化算法,调节台区内电动汽车充电的数量,调节本地电网有功平衡、实现削峰填谷;剩余的处于空闲态的电动汽车将其控制为虚拟同步调相机,来调节本地电网有功功率的电压。
本文提出的方法能够为接入大量分布式能源、电动汽车的配电网提供一种就地化的控制方案。仿真结果表明,所提出的优化模型及控制策略在完成就地消纳DG发电功率的同时,也使虚拟电站在峰值负荷时期保留跨台区供电的容量。同时,空闲态的电动汽车为本地台区提供无功功率补偿,实现就地支撑本地电网的功能。
猜你喜欢
中学生数理化·中考版(2021年12期)2021-12-31
建材发展导向(2019年5期)2019-09-09
电子制作(2017年2期)2017-05-17
通信产业报(2016年44期)2017-03-13
电测与仪表(2014年16期)2014-04-22
电测与仪表(2014年13期)2014-04-04
电力需求侧管理(2014年6期)2014-03-20
雕塑(1999年2期)1999-06-28
雕塑(1996年2期)1996-07-13
雕塑(1996年4期)1996-07-12