
Energy Model for UAV Communications: Experimental Validation and Model Generalization
2021-07-14 09:07:52NingGaoYongZengJianWangDiWuChaoyueZhangQinghengSongJachenQianShiJin
China Communications 2021年7期
Ning Gao,Yong Zeng,2,*,Jian Wang,Di Wu,Chaoyue Zhang,,Qingheng Song,Jachen Qian,Shi Jin
1 National Mobile Communications Research Laboratory,Southeast University,Nanjing 210096,China
2 Purple Mountain Laboratories,Nanjing 211111,China
3 College of Electronic and Optical Engineering&College of Microelectronics,Nanjing University of Posts and Telecommunications,Nanjing 210023,China
4 College of Electrical and Information Engineeing,Huaihua University,Huaihua 418008,China
5 Key Laboratory of Intelligent Control Technology for Wuling-Mountain Ecological Agriculture in Hunan Province,Huaihua 418008,China
Abstract: Wireless communication involving unmanned aerial vehicles(UAVs)is expected to play an important role in future wireless networks.However,different from conventional terrestrial communication systems,UAVs typically have rather limited onboard energy on one hand,and require additional flying energy consumption on the other hand.This renders energy-efficient UAV communication with smart energy expenditure of paramount importance.In this paper,via extensive flight experiments,we aim to firstly validate the recently derived theoretical energy model for rotary-wing UAVs,and then develop a general model for those complicated flight scenarios where rigorous theoretical model derivation is quite challenging,if not impossible.Specifically,we first investigate how UAV power consumption varies with its flying speed for the simplest straight-and-level flight.With about 12,000 valid power-speed data points collected,we first apply the model-based curve fitting to obtain the modelling parameters based on the theoretical closed-form energy model in the existing literature.In addition,in order to exclude the potential bias caused by the theoretical energy model,the obtained measurement data is also trained using a model-free deep neural network.It is found that the obtained curve from both methods can match quite well with the theoretical energy model.Next,we further extend the study to arbitrary 2-dimensional (2-D) flight,where,to our best knowledge,no rigorous theoretical derivation is available for the closed-form energy model as a function of its flying speed,direction,and acceleration.To fill the gap,we first propose a heuristic energy model for these more complicated cases,and then provide experimental validation based on the measurement results for circular level flight.
Keywords:UAV communications;energy model;energy consumption;flight experiments;model generalization
I.INTRODUCTION
Integrating unmanned aerial vehicles(UAVs)into terrestrial cellular networks is regarded as a win-win technology for both UAV industry and cellular operators[1,2].On one hand,UAVs with their respective missions can be connected to cellular networks as new aerial users for supporting their command and control as well as payload communications,a paradigm known ascellular-connected UAVs.On the other hand,dedicated UAVs can be deployed as new aerial communication platforms such as flying base station and relays,to assist in terrestrial wireless communications,which is known asUAV-assisted wireless communica-tion.
Despite of the appealing benefits for integrating UAVs into cellular networks,there are still many practical challenges that hinder their large-scale usage.One critical issue is the limited onboard energy of UAV [3],which restricts the UAV endurance and hence operation time.Besides,different from that in conventional terrestrial communications,UAV energy consumption consists of two main parts: one is the conventional communication-related energy consumption due to,e.g.,signal processing,circuits and power amplification;the other is the propulsion energy consumption to ensure that the UAV remains aloft and supports its movement.In general,the propulsion energy consumption depends on the flying status and is usually much more significant than communicationrelated power expenditure.Therefore,understanding how the UAV energy consumption varies with its flying status is of paramount importance for achieving energy-efficient UAV communications,i.e.,maximizing the communication performance with a smart UAV energy expenditure.
1.1 Energy Model Review
The prior study on UAV energy model can be loosely classified into three categories.The first category simply applies the existing energy models of the ground vehicles or robots to UAVs [4,5].For example,in[6],by using the energy models of ground vehicles[4]and terrestrial base stations [7],the placement of latency aware UAV base station was studied in heterogeneous networks with the energy capacity limitation.As DC motors are frequently adopted in ground robots to provide the body power,the energy model of a robot can be modeled as the sum of energy model of DC motor,which can be closely approximate by a six degree polynomial[8].While the power consumption of mobile robots moving on the ground are not applicable for UAVs due to their fundamentally different moving mechanisms.In particular,the movement of ground robots mainly needs to overcome the friction force,that of aerial vehicles needs to overcome the air-resistance force or drag force.The second category is the experimental-driven heuristic energy model based on measured/simulated data,[9–13].For example,in [9],the energy consumption of a specific drone is given as a function of its speed and operating conditions based on experiment result.Reference[14]and [15]have used the energy model in [9]to study the energy-efficient UAV communications.Nevertheless,the energy model in[9]is simply expressed as the integral of power over time,the lack of closed form expression limits its application.With the dynamic model of a lithium polymer battery,the relationship between energy consumption and quadrotor movement was experimentally studied in[10,12,13].For solar-powered UAV,the authors gave the solar cells energy consumption expression and verified it via the virtual flight evaluation system[11].The last category is the theoretical-driven energy model by kinematic and aircraft theory[16,17],such as[18–22].For example,the authors in [18]have defined an energy model as an integral function of the motor torque and rotor speed,where the motor torque is modeled as being proportional to the current through the torque constant.The steady state energy model assumes that the UAV is in steady state behavior most of the time[19].However,such model is limited on steady state flight,that is the external forces are in static equilibrium,yielding zero net acceleration.Furthermore,the force analysis is needed to obtain the steady state thrust and many complex parameters are required when using such model.The authors in [20]modeled the energy consumption of a class of small convertible UAVs as a function of propeller’s speed and torque,with six model parameters identified based on reported data.Moreover,the quadcopter power consumption estimation has been analyzed with the simulation of the quadcopter movement position vector[21].The propulsion energy model based on a integral function of propulsion and speed has been verified in [22]by using the empirical parameters provided in[23].
Note that most of the prior works either gave heuristic energy model without rigorous mathematical derivation,or used rather sophisticated models based on aerodynamic theory involving many implicit parameters that are difficult to interpret nor use in wireless communities.To address such issues,in our previous work[3,24],rigorous mathematical derivations have been performed to develop closed-form expressions for energy model with respect to the UAV flying status,such as speed and acceleration.Specifically,for a fixed-wing UAV,the energy model consists of two main components: the parasite power and the induced power.The parasite power,which increases in cubic with the flying speed,is required to overcome the parasite friction drag,and the induced power,which is inverse proportional to the flying speed,corresponds to the component required to overcome the induced drag.Different from fixed-wing UAVs,the energy consumption of rotary-wing UAVs contains an additional component,namely,blade profile power,which is needed to overcome the profile drag due to the rotation of blades.The energy model for rotary-wing UAV in straight-and-level flight with constant speed has been derived[24].Note that although such models are easy to interpret and have been extensively used for designing energy-efficient UAV communication systems,to our best knowledge,they have not yet been experimentally validated in practice.As a preliminary effort to fill this gap,in this paper,we have conducted extensive flight experiments to practically measure the UAV power consumption so as to validate the energy model of rotary-wing UAV developed in[24].Specifically,we first conducted the simplest straightand-level flight experiment to validate the relationship between power consumption and flying speed for the developed theoretical energy model.As an effort for model generalization,we propose a heuristic energy model for the more complicated cases with arbitrary flight,and then provide experimental validations based on the measurement results of the circular level flight with uniform speed.
1.2 Contributions
In this paper,we validate the theoretical energy model of straight-and-level flight for rotary-wing UAVs via extensive flight experiments,then generalize the model to more complicated flight scenarios.The specific contributions of our work are summarized as follows:
• For our recently developed theoretical energy model of rotary-wing UAVs in straight-and-level flight,we validate its correctness via extensive flight experiments.Specifically,with about 12,000 valid power-speed data points collected,model-based curve fitting is applied to find the key modelling parameters.In addition,to exclude the potential bias caused by the theoretical energy model,we further apply the model-free deep neural network to train energy consumption curve.The fitting curves form both methods match quite well with theoretical energy model,which provides the double validations about the model correctness.
• To generalize the energy model,we further extend the study to arbitrary 2-dimensional (2-D)flight.However,as there is no rigorous theoretical derivation available for the closed-form energy consumption as a function of its flying speed,direction,and acceleration,we propose a heuristic energy model for such more complicated scenarios.To validate the proposed heuristic energy model,we conducted flight experiment for the special circular level flight,where the measurement results gave good match with the generalized energy model.
• Some insights are obtained with the measurement results.For straight-and-level flight,the theoretical energy model better characterizes the energy consumption than the polynomial model.With the experiments performed,it is found that when the flight speed is under 14 m/s,the energy consumption of the straight-and-level flight is about 350 ~ 500 W.For circular level flight,when the flight speed is low,the flight radiuses have insignificant impact on power consumption,and with the flight speed increases,the impact of flight radius on power consumption becomes more significant.
Note that some prior efforts on UAV,some flight experiments have also been pursued.In [9],the flight time and energy in a random area was verified by actually flying the area with a quadcoper.Three experiments including hover,steady-state ascend/descend and cyclic straight line were conducted to verify the energy model in [19].In [12],the authors tested the Parrot AR.drone’s power and energy consumption for moving horizontally,vertically upwards and downwards by connecting the battery contacts to a DC power supply.Testing more flight behaviors,a series of experiments focused on understanding the impact of several factors on energy consumption of UAVs have been conducted in[13].Considering the payloads,the authors in[25]tested the endurance estimation model with variations in payload mass and payload power consumption by using a custom-developed quadrotor and autonomous ceiling attachment system.The impact of ground power consumption,communication with the ground station,movement,speed and payload has been analyzed with the data based power consumption model[26].In[10],the fixed time and fixed distance experiments were performed in a closed environment to avoid windy conditions.However,most of such existing experiments aim to obtain an energy model expression by fitting measurement data,rather than verifying a theoretically derived energy model by measurement data,i.e.,[12,13,26].Furthermore,limited work has considered the flight acceleration/decleration phase in the experiments,which typically has a high impact on model validation[19].To fill this gap,the main objective of our current work is to validate the theoretical model derived in our previous work[24]via the flight experiments,based on which a more general model for sophisticated flight scenarios is developed.
II.THEORETICAL ENERGY MODEL OVERVIEW AND FLIGHT EXPERIMENT SETUP
In this section,we first provide a brief overview on the theoretical energy model derived in[24]and give some insights.Then,we design three flight experiments and discuss the details of the corresponding data processing.
2.1 Energy Model for Straight-and-Level Flight
The straight-and-level flight refers to the uniform rectilinear movement in the horizontal plane without UAV acceleration/deceleration.For a rotary-wing UAV in straight-and-level flight with speedV,it has been derived in [24]that the power consumption can be expressed as
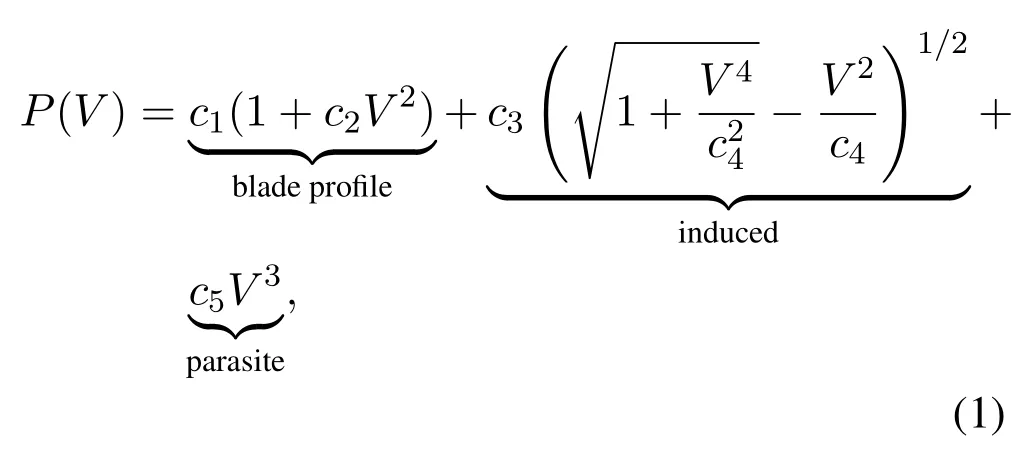
whereci,i= 1,···,5,are the modelling parameters that depend on the aircraft weight,air density,rotor disc area,as specified in [24].A typical plot of the power consumption curve (1) is shown in figure 1.Based on the figure and(1),the following observations can be obtained[1].
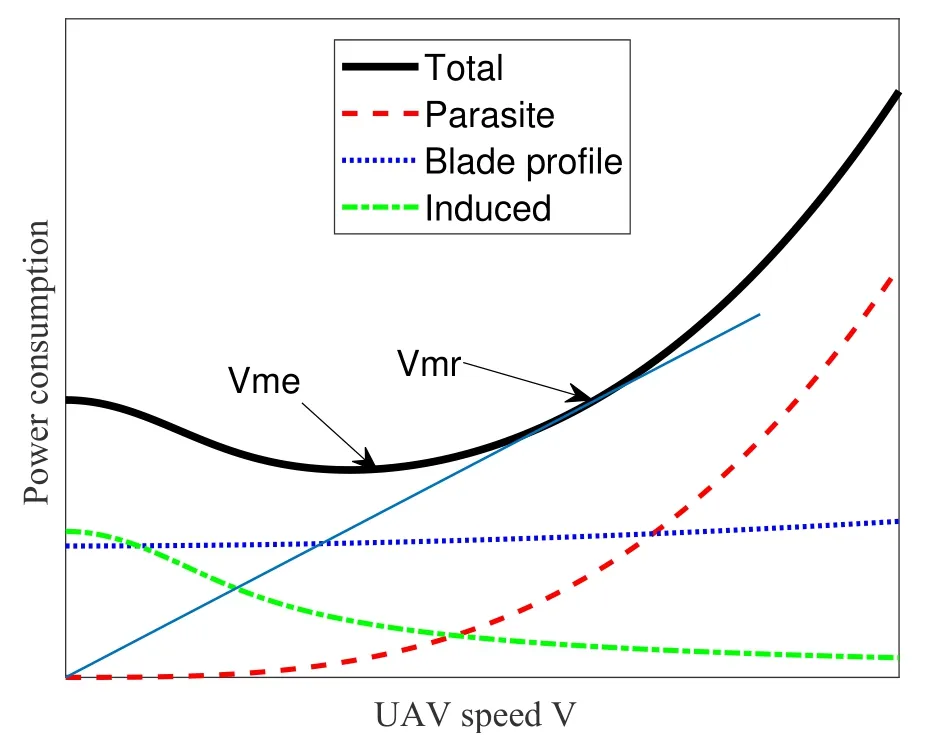
Figure 1.A typical plot of power consumption for rotarywing UAV in straight-and-level flight[1].
• The parasite powerc5V3is the component required to overcome the parasite friction drag due to the moving of the aircraft in the air,and the induced powercorresponds to that required to overcome the induced drag developed during the creation of the lift force to maintain the aircraft airborne.Different from fixed-wing UAV,the blade profile powerc1(1 +c2V2) is a unique term for rotary-wing UAV,which is required to overcome the profile drag due to the rotation of blades.
• For the special case with speedV=0,the power consumption for rotary-wing UAV is given by a finite valuec1+c3.This power consumption corresponds to the rotary-wing UAV hovering at fixed location.
• The parasite power exists only when the UAV has non-zero flying speed.Both the blade profile power and the parasite power are increasing with the aircraft speedV,while the induced power decreases asVincreases.The maximum-endurance speedVmeis the optimal UAV speed that maximizes the UAV endurance for a given onboard energy and the maximum-range speedVmris the optimal UAV speed that maximizes the total traveling distance with any given onboard energy[24].
2.2 Experiment Setup
To validate the above theoretical energy model,we have performed extensive flight experiments to actually collect the data for UAV power consumption.All experiments are performed by using our customized quadrotor UAV.For all flight experiments,the instantaneous current flow and voltage of the UAV battery are recorded in the storage device of UAV,together with the flying status,such as location,speed,acceleration,with a data collection frequency of 5Hz,i.e.,one data measurement is obtained for every 0.2 seconds.Based on the recorded data,the instantaneous total UAV power consumption is obtained by multiplying the current flow by the voltage,which includes both the flying power and the communication-related power.In terms of the communication-related power,while its actual value depends on various factors like the channel condition,communication quality requirement,etc.,the typical maximum power level is on the order of milliwatts or watts,due to practical limitations like the dynamic range of power amplifiers and transmit power regulations.In our experiment,to measure the communication-related power,we firstly measured the UAV communication-related power consumption offline,with the UAV on the ground communicating with its control station,and found that the power level is around 0.8 W,which is much lower than the power consumption when flight in the air (several hundreds of watts).Therefore,in the following experimental measurement,the communication-related power is ignored and the recorded power consumption of the UAV battery is treated as the flying power.The actual UAV and its accessories used in the flight experiments are shown in figure 2,and the specifications of the UAV and the battery are listed in Table 1 and Table 2,respectively.The flight altitudes for all experiments are set to be 20 m.The first experiment focuses on the straight-and-level flight with an uniform speed.To validate the energy model(1),we need to obtain different power consumption value at different flying speed.In each specified speed,the UAV is instructed to take off and fly following the pre-determined straight-andlevel path for data collection.The experiment is repeated for each targeting speed.Ranging from 0 to 14 m/s in a step size of 1 m/s.Due to the site space restriction,the UAV needs to fly several round trips in order to collect enough data for each specified speed.Thus,with fixed data sampling rate,the number of required round trips vary with the UAV speed: the faster the speed is,the more flight round trips are needed.
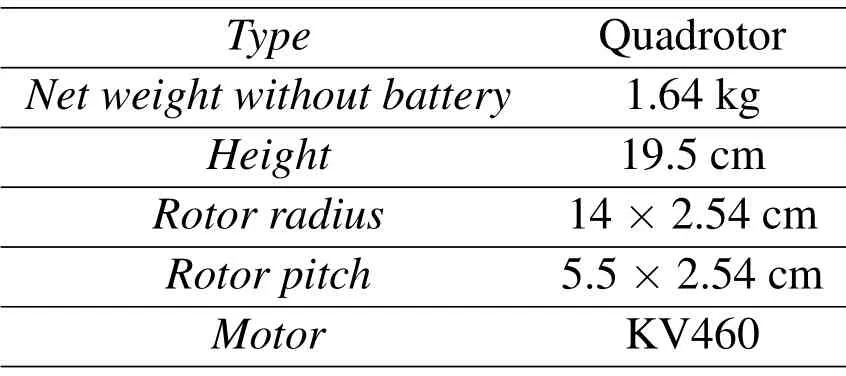
Table 1.The specifications of the UAV.
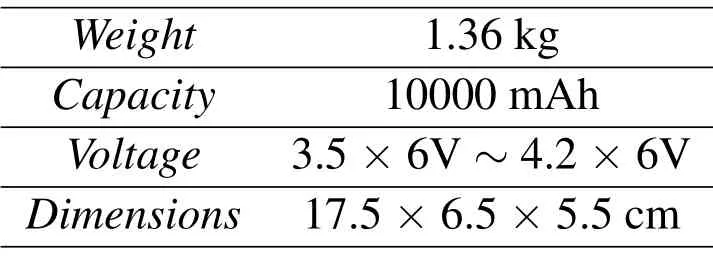
Table 2.The specifications of the battery.
2.3 Data Processing
2.3.1 Data Preprocessing Note that the energy model in (1) is derived for uniform flying as a function of its flying speed.Thus,among all the data measurements collected,we need to filter out those data when the UAV is in relatively steady flight.For the targeted straight-and-level flight,the raw measured data without any preprocessing is shown in figure 3.As the UAV needs to accelerate to the specified speed at the beginning of the experiment and decelerate to zero while it reaches the site edge and needs to turn around,there are some data points irrelevant to the specified speed.To this end,the data is pre-processed to exclude those points in the acceleration or deceleration phases.Specifically,the number of round trips in each experiment is recorded on the global position system(GPS)supported by google map.The data with respect to speed can be obtained from the google mobile service (GMS) of the GPS.Denote byPiandPi+1the measured power consumption at adjacent sampling intervals,andViandVi+1the corresponding speed forPi,Pi+1.Then the acceleration/decleration for the corresponding time interval can be approximated as
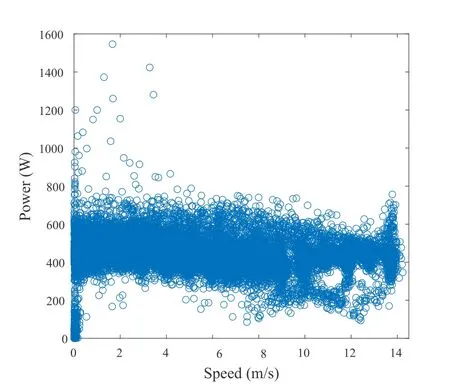
Figure 3.The scattering plot of the measured data in straight-and-level flight before data pre-processing.

wherefs= 5 Hz is the data sampling frequency.If|a| >0.5 m/s2,we regard that the UAV is in acceleration/decleration phase; otherwise,it is in relative steady flight and the corresponding measurement data is retained for further processing.The measured data after such preprocessing is illustrated in figure 4.From this figure,we find that there exists variations for the power even with the same speed.To our best understanding,the dominating factor that causes this phenomenal is the wind.Besides,the temperature,the humidity,the air pressure may be some factors that can cause the power fluctuations.
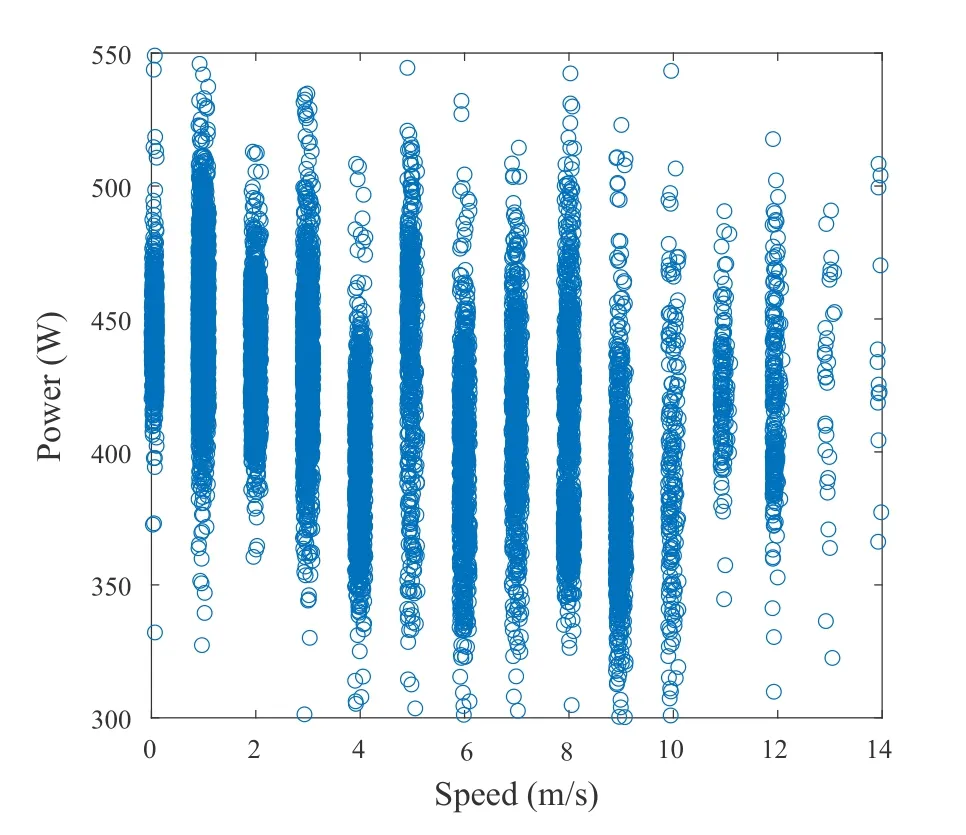
Figure 4.The scattering plot of the measured data in straight-and-level flight after pre-processing.
2.3.2 Model-Based Curve Fitting
Curve fitting aims to fit data to user-defined fitting functions.Therefore,we first use the experiment measurement data to fit our theoretical energy model in(1).Denote the measured speed-power pair as(Vi,Pi)for thei-th data point after preprocessing.With the least squares fitting,the goal is to find the modelling parametersc1,...c5in (1) by minimizing the mean square error,i.e.,
whereNdenotes the total number of valid data pairs after preprocessing,P(Vi)represents power consumption obtained from the theoretical energy model given in(1).Here,we use the built-in functionality of Matlab for curve fitting with the obtained data measurements.
2.3.3 Model-Free Deep Neural Network Training
To exclude the potential bias caused by the theoretical energy model,we also applied a model-free training with the obtained data based on a deep neural network.A neuron in a neural network is a mathematical function that collects and classifies information based on a specific architecture.The network bears a strong resemblance to statistical methods such as curve fitting and regression analysis.Thus,the neural networks are usually used for classification and regression tasks.Specifically,the neural network is regarded as a function approximator,and does not assume any prior model.By using a neural network with several hidden layers,the deep neural network can fit the nonlinear curves.The developed deep neural network architecture is shown in figure 5.It consists of one input layer by taking the UAV speed as the input,three hidden layers with each hidden layer having ten neurons,and one output layer to predict the UAV power consumption.The tanh activation functions are used.The deep neural network is trained by using Tensorflow and Keras.In curve training,the learning rate is set to be 0.01.As a high-efficiency stochastic optimization algorithm,the Adam algorithm is used to train the network parameters to minimize the mean squared error loss.
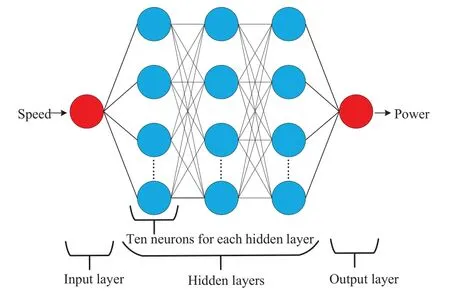
Figure 5.Deep neural network for model-free curve fitting of UAV energy consumption.The network takes the UAV flying speed as the input,and output the predicted power consumption.
III.EXPERIMENT RESULTS AND DISCUSSIONS
We validate the theoretical energy model (1) via the straight-and-level flight experiment,namelyExperiment 1.The GPS trajectory of one of the straightand-level flights is shown in figure 6.From the figure,we can see that the curved portion corresponds to the UAV taking off and landing phases,while the main long straight trajectories correspond to the straightand-level flight.Figure 7 shows one example of the recorded UAV speed versus the sample number for each specified speed.It is observed that for most of the time,the UAV speed fluctuates around the specified flying speed,while there are periodic abrupt speed changes to 0.These actually correspond to the direction reversal since the UAV has to accelerate/decelerate to reverse its flying direction when it reaches the boundary of the experiment site.Before performing curve fitting,we apply the data preprocessing as discussed in Section 2.3 to retain those data in relatively steady flight,and the resulting number of data points for different speeds used for curving fitting is shown in figure 8.We apply the curve fitting method based on the theoretical energy model (1),and the result is shown by the green curve in figure 9.We can observe that the fitting curve based on theoretical energy model first increases then decreases,and then increases.With the flight speed increases,i.e.,V≥10 m/s,the energy consumption increases significantly.Compared to figure 1,we can find that the measured result matches quite well with the theoretical model curve.To exclude the potential bias caused by the theoretical energy model,the power-versusspeed relationship based on neural network training is also obtained and the result is shown by the red curve in figure 9.From the figure,we can find that the curve fitted by deep neural network also first increases then decreases,and then increases,which shows a good match with the curve based on the theoretical energy model.To further validate our theoretical energy model,the fitted curve based on the polynomial model in [8]is shown by the yellow curve in figure 9.The result shows that the power consumption curve first decreases and then increases,which is different from both theoretical energy model based fitting curve and deep neural network based fitting curve,especially in low speed.

Figure 6.Experiment 1: The straight-and-level flight experiment.The GPS trajectory of straight-and-level flight.
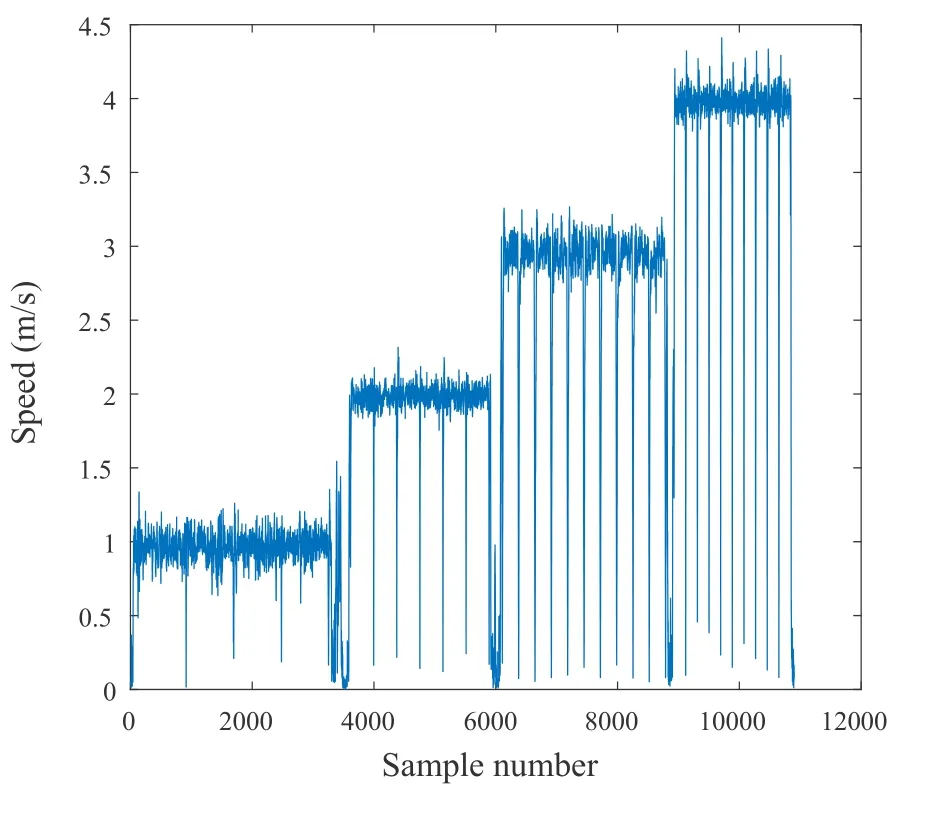
Figure 7.Experiment 1: The straight-and-level flight experiment.The UAV speed versus sample number.
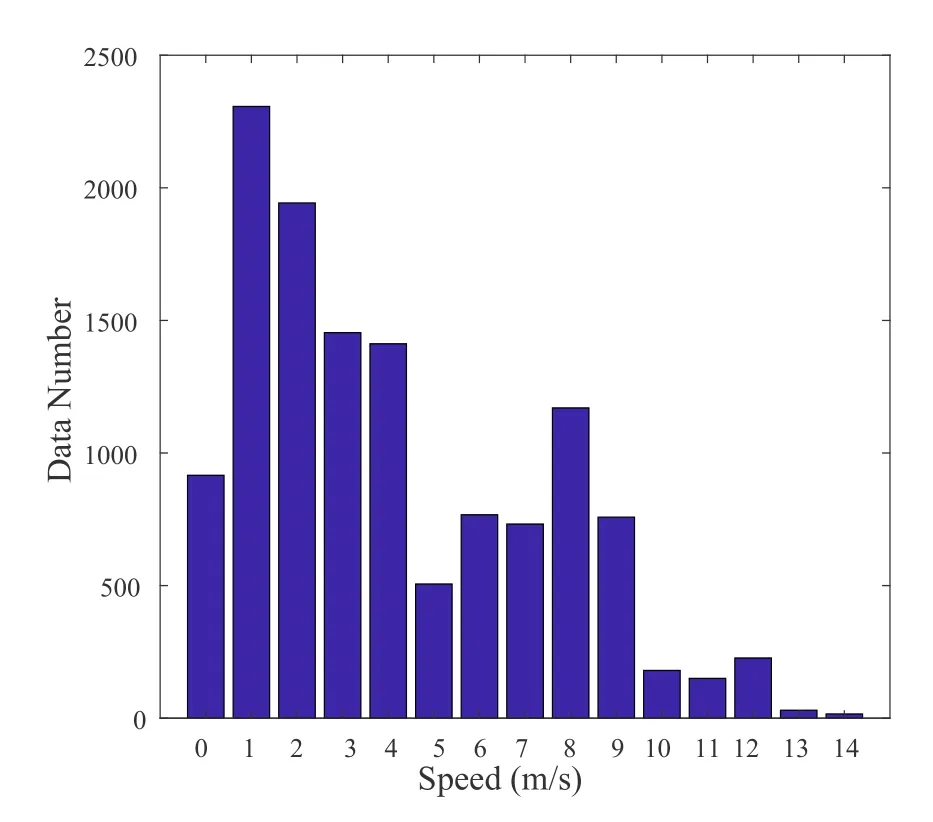
Figure 8.The number of valid data points after data preprocessing for different speed in straight-and-level flight.
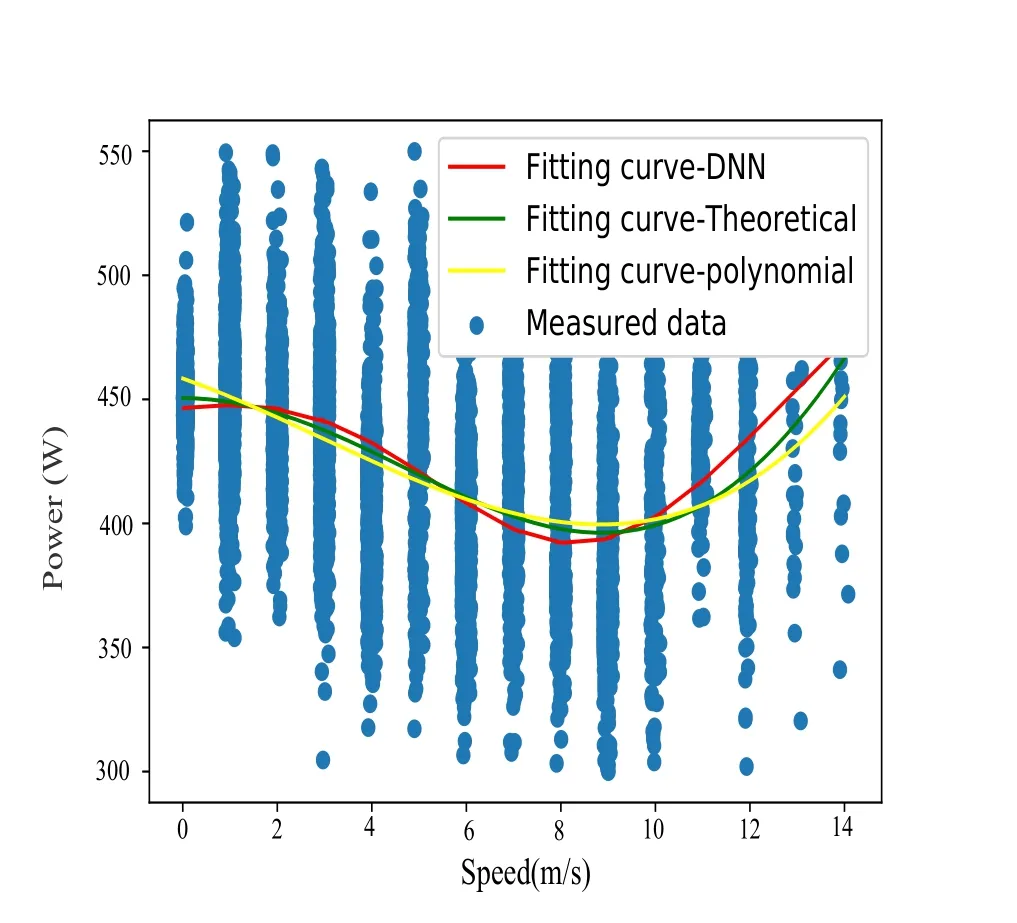
Figure 9.The obtained power versus speed relationship with curve fitting based on theoretical energy model (1),deep neural network training and polynomial model[8],respectively.
IV.ENERGY MODEL GENERALIZATION AND EXPERIMENTAL VALIDATION
4.1 Model Generalization for Arbitrary Flight
Note that the energy model in(1)is applicable only for straight-and-level flight with uniform speed.For more complicated scenario such as arbitrary 2-D flight,to our best knowledge,no rigorous theoretical derivation has been reported for the closed-form energy model as a function of its flying speed,direction,and acceleration.In this section,we extend (1) to the arbitrary 2-D level flight by proposing the following heuristic energy model.
For arbitrary 2-D level flight with UAV trajectory q(t)∈R2×1,by following the similar decomposition of the UAV acceleration along the parallel and perpendicular directions of its flying velocity as in [3],the energy consumption of rotary wing UAV is presented at the top of the next page,wherev(t) = ˙q(t)is the UAV flying velocity,a(t) = ¨q(t)is the acceleration,is centrifugal acceleration,gis the gravitational acceleration,andis the change in kinetic energy.
From(4),we have the following observations:
• The UAV’s energy consumption for arbitrary 2-D level flight only depends on its speedV(t) =‖v(t)‖and centrifugal accelerationa⊥(t).The centrifugal accelerationa⊥(t) is normal to the UAV velocity vector and causing heading change yet without altering the UAV’s speed.
• The accumulative impact of tangential acceleration on UAV power consumption is reflected in the change of kinetic energy,which only depends on the initial and final speed,,rather than the intermediate speeds.
• One important special case of the arbitrary 2-D level flight is the circular level flight with uniform speed.Letrdenote the circle radius andVthe flying speed.Then the corresponding power consumption as a function ofrandVcan be obtained by letting

Experiment 2is set up to validate the heuristic energy model.For the special case of circular level flight with radiusrand speedV,whereVvaries from 1 m/s to 6 m/s in step size of 1 m/s,and the flight radiusrchanges from 10 m to 20 m in step size 10 m.For each specified speed and flight radius,the UAV is made to take off and fly in horizontal circular to obtain enough data points.Then,we repeat the experiment for the next specified speed and flight radius.In data preprocessing,the data points corresponding to taking off and landing phases are excluded,so as to only retain the data points corresponding to circular level flight.
4.2 Experiment 2: The Circular Level Flight
The GPS trajectory of one of the circular level flight experiments is shown in figure 10,which is represented by the red circle.Figure 11 shows the recorded UAV flying speed versus the sample number.We can observe that the measurement speeds fluctuate around the specified speeds.The reason is that the measurement speeds are slightly affected by the complex environment factor such as the speed of wind.With the modelling parametersc1,...c5obtained based on the curve fitting in straight-and-level flight discussed in Section III,resulting theoretical energy model and measurement results for circular level flight are shown in figure 12 with different flight radiuses.The flight radiusr=∞corresponds to special case of straightand-level flight.From the figure,it is observed that the fitting results can well match the heuristic energy model of circular level flight.For fixed flight speed,we find that the power consumption increases as the circle radius decreases.This is because that the UAV has to consume more power to increase the centrifugal accelerationa⊥when the radius becomes smaller.This result can verify (4) that the centrifugal acceleration is inversely proportional to the flight radius.Compared with different curves,in low speed,i.e.,V ≤4 m/s,the flight radiuses have insignificant impact on power consumption,and with the flight speed increases,i.e.,V ≥4 m/s,the impact of flight radius on power consumption becomes more significant.

Figure 10.Experiment 2: The circular level flight experiment.The GPS trajectory of circular level flight.
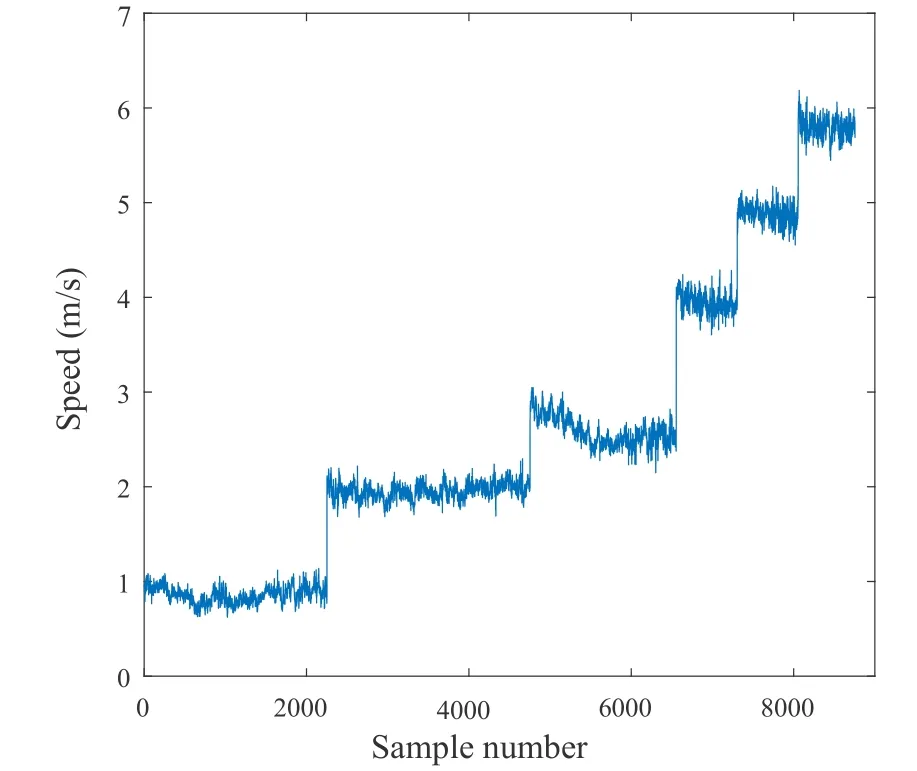
Figure 11.Experiment 2: The circular level flight experiment.The UAV speed versus sample number for circular level flight.
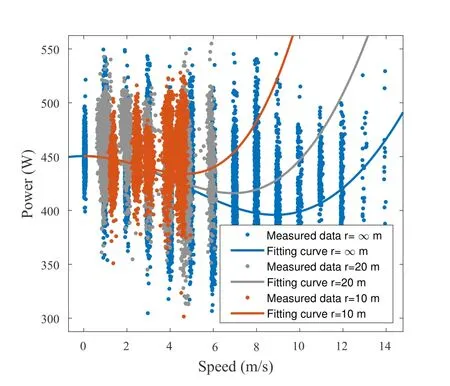
Figure 12.The fitting curves of power consumption in circular level flight.
V.CONCLUSIONS AND FUTURE WORK
In this paper,we have validated the recently derived theoretical energy model for rotary-wing UAVs via flight experiments.With the collected measurement data,we have used the model-based fitting and modelfree deep neural network fitting to fit the curves.In model-based curve fitting,we have found that the fitted curves based on both the theoretical energy model and the model-free deep neural network match quite well with each other.Furthermore,the theoretical energy model better characterizes the UAV energy consumption than the polynomial model.In addition,we have proposed a heuristic energy model for arbitrary 2-D level flight,and verified the result for circular level flight.
In our future work,more extensive experiments will be conducted to collect more data to further verify the accuracy of the theoretical energy model.Different UAVs will be used to data collection,and multiple theoretical energy models will be compared using the experimental data.To further generalize the energy model,we will study the energy model for arbitrary 3-D flight and design the corresponding flight experiments to validate its correctness.Furthermore,experiments by taking into account various other factors like wind speed,aircraft weight,altitude(air density),etc.,will also be conducted for theoretical model verifications.
ACKNOWLEDGEMENT
This work was supported in part by the Program for Innovative Talents and Entrepreneur in Jiangsu Province under Grant 1104000402,in part by the Research Fund by Nanjing Government under Grant 1104000396,in part by the National Science Foundation of China under Grants 62001109&61921004,in part by the China Postdoctoral Science Foundation under Grants BX20200083 & 2020M681456,in part by the Fundamental Research Funds for the Central Universities of China under Grants 3204002004A2&2242020R20011,in part by the open research fund of the National and Local Joint Engineering Laboratory of RF Integration and Micro-Assembly Technology under Grant No.KFJJ20180205,and in part by the NUPTSF Grants No.NY218113&No.NY219077.
- China Communications的其它文章
- Joint Topology Construction and Power Adjustment for UAV Networks: A Deep Reinforcement Learning Based Approach
- Joint Computing and Communication Resource Allocation for Satellite Communication Networks with Edge Computing
- An Intelligent Scheme for Slot Reservation in Vehicular Ad Hoc Networks
- CLORKE-SFS:Certificateless One-Round Key Exchange Protocol with Strong Forward Security in Limited Communication Scenarios
- Information-Defined Networks: A Communication Network Approach for Network Studies
- Deep Learning Based User Grouping for FD-MIMO Systems Exploiting Statistical Channel State Information