基于非线性卡尔曼滤波器的双通道传感器故障检测及隔离方法
2021-07-14 09:25朱麟海
节能技术 2021年3期
刘 娇,程 然,王 颖,朱麟海
(1.中国航空工业集团公司沈阳飞机设计研究所,辽宁 沈阳 110035;2.哈尔滨工业大学能源科学与工程学院,黑龙江 哈尔滨 150001;3.哈电发电设备国家工程研究中心有限公司,黑龙江 哈尔滨 150028;4.哈尔滨工程大学动力与能源工程学院,黑龙江 哈尔滨 150001)
0 引言
航空发动机良好的工作状态决定了飞行的安全性和稳定性。传感器是发动机状态监测的关键部件,是信息获取的主要装置[1-2]。飞行中的诸如温度、压力等主要状态参数都是通过传感器测量获得,传感器若发生故障,便会反馈错误信息,使控制系统产生故障,无法保障飞行的安全可靠。然而,传感器通常情况下工作于恶劣的复杂环境中,使其极易发生故障。因此针对传感器的故障诊断方法研究逐渐成为学者关注的焦点。
目前传感器故障诊断研究主要包括基于数据驱动以及基于模型的诊断方法,其中基于模型的诊断方法可分为基于状态估计、参数估计和等价空间的方法[3]。其中,卡尔曼滤波算法较其它方法相对成熟。任雅浩等人[4]采用基于卡尔曼滤波器方法的传感器信号故障诊断方案,快速实现了模型转换。黄强等人[5]对卡尔曼滤波器的残差检验进行了改进,提高了故障检测速度。赵文博等人[6]采用基于卡尔曼滤波器组的故障诊断方法实现传感器的软、硬故障诊断。Naderi等人[7]将扩展卡尔曼滤波器和无迹卡尔曼滤波器用于非线性模型的故障诊断中。然而,目前基于卡尔曼滤波算法的传感器故障诊断方法大多是基于线性模型。但发动机是一个非线性系统,直接利用线性模型近似代替会影响模型的精度,进而对传感器故障诊断势产生影响。平衡流形展开模型是由线性化模型构造的非线性模型,这种模型融合了非线性模型与线性模型的优点[8]。隋岩峰等人[9]基于平衡流形展开模型提出辨识方法并应用到航空发动机。李述清等人[10]对平衡流形展开模型进行了完整的描述,并进一步讨论了影响模型输出的主要因素。
为解决传统基于线性模型的故障诊断算法检测精度低的问题,本文建立了一种基于改进平衡流形展开模型的故障检测方法,利用相似准则实现了输入量维度的扩充。在此基础上探讨了基于改进的平衡流形展开模型与容积卡尔曼滤波器相结合的双通道传感器故障诊断及隔离方法,在CFM-56模型机上的仿真试验验证了所提方法的有效性。
1 改进的平衡流形展开模型建立
平衡流形是非线性系统所有平衡点的集合[11]。而对于航空发动机而言,平衡点即是稳态点。根据相似理论和发动机共同工作线原理,当发动机相似转速确定时,发动机工作状态也就唯一确定,即确定了在相似状态下的一个稳态工作点,而所有稳态工作点的集合构成共同工作线。当满足几何相似、可调部分固定和排气嘴喉部区域达到临界或超临界状态时,外界大气条件以及发动机转子转速等变化只会引起共同工作点在共同工作线上移动而不改变共同工作线的形状。因此,相似状态下的共同工作线与平衡流形的概念具有一定的相似性。
传统平衡流形可以看作是在入口总温和总压不变的条件下的共同工作线[12]。由于原有方法仅考虑单输入量对系统的影响,发动机入口总温和总压的变化本质上改变了原有的平衡流形的位置和形状。图1(a)是不同入口总温下的平衡流形。当航空发动机的可调节部件的位置保持恒定时,处于相似工况的两个不同的平衡点虽然在两条不同的平衡流形上,但可以将其中一个平衡点折合到另一条平衡流形上,因此可以建立不同平衡流形间的映射关系,从而将原来的多维平衡流形压缩为了一维改进平衡流形,实现了平衡流形空间的压缩。

图1 改进平衡流形展开模型的原理图
当入口总温或总压由标准工况变化到某一个定值时,传统的平衡流形展开模型需要重新获取新的工况下的实验数据来进行辨识。如前所述,基于相似理论将发动机在入口总温、总压的性能参数折合到标准工况下实验所得的平衡流形上,然后根据辨识到的模型参数计算航空发动机在各个稳态工况点的折合性能参数,最后根据相似原理反折合求出发动机在入口总温、总压的工况下的各个稳态工况点的实际性能参数,这样便无需增加额外的实验数据。

(1)

(2)
因此有
(3)
2 双通道传感器故障诊断及隔离方法
目前,双通道电子控制器广泛应用于航空发动机中。所谓双通道是指由两个传感器测量同一个发动机状态参数,分别称A、B通道。一般情况下,A通道传感器用于系统闭环控制或状态监测,B通道测量值处于热备用状态。针对这种特殊配置的传感器,可开展双通道传感器故障检测诊断及隔离研究。令A通道与B通道的测量值之差为双通道残差,如式(4)所示,其中,i表示第i个测量参数
(4)
当双通道残差超出其阀值εi时,判断第i个测量参数的传感器发生故障,该方法只能用于隔离故障传感器,但无法判断具体发生故障的传感器,因此结合如前所述的容积卡尔曼滤波,利用非故障传感器信息对故障传感器信号进行重构,并通过比较重构信号与两个传感器之间的残差变化确定故障传感器,具体信号重构方法,如图2所示。
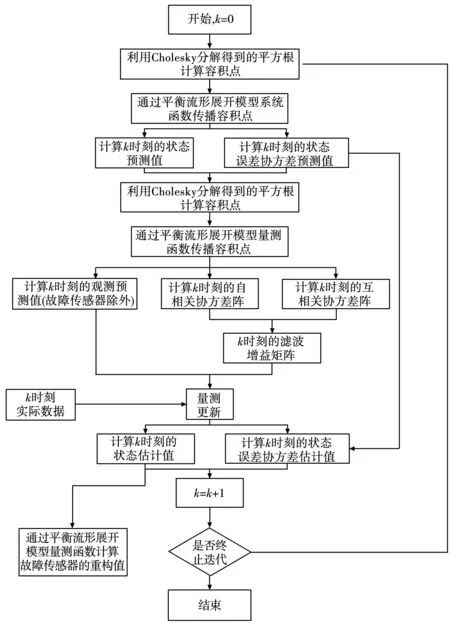
图2 基于容积卡尔曼滤波器的信号重构图
在使用卡尔曼滤波器阵列进行传感器故障诊断时,卡尔曼滤波器阵列与需要进行故障诊断的传感器数量一一对应。对任一传感器,取除去该传感器后的m-1个传感器测量值构成的子集作为输入量。由于发动机是双传感器配置,相较于在原有卡尔曼滤波阵列的基础之上增加一倍阵列数量的方法,若利用双传感器之间的残差进行故障隔离,则对任一传感器的监测只需要建立一个卡尔曼滤波器,可以降低数据存储和计算量的要求,其故障诊断逻辑如图3所示。
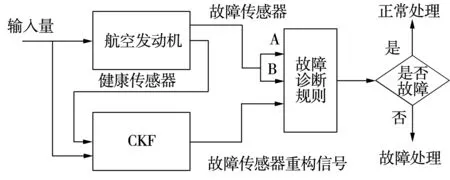
图3 双通道传感器故障检测诊断及隔离逻辑图
3 传感器故障诊断及隔离仿真分析
结合容积卡尔曼滤波实现发动机传感器故障诊断的数学模型为非线性的改进平衡流形展开模型,该模型为多输入多输出模型,能够满足发动机进口条件和燃油量变化时发动机运行情况的仿真。对此设置两种发动机运行工况,分别为发动机进口条件不变情况下单个稳定工况的仿真(即标准工况)以及发动机进口条件实时变化情况下多个动态过程的仿真。
3.1 发动机转速传感器偏置故障诊断与隔离
通过计算双传感器之间的偏差量能够实现转速传感器的异常检测并实现故障传感器的隔离,图4(a)所示;基于容积卡尔曼滤波器对故障传感器信号进行重构,并比较重构信号与A、B传感器之间的差值能够实现故障传感器的隔离,可以看出A通道的sensor 1存在故障,如图4(b)所示。

图4 某工况下转速传感器偏置故障检测结果
3.2 发动机转速传感器漂移故障诊断与隔离
图5为转速传感器发生漂移故障的检测结果,可以看到,所提方法能够有效检测传感器漂移故障并隔离故障传感器,故障传感器为A通道的sensor 1。
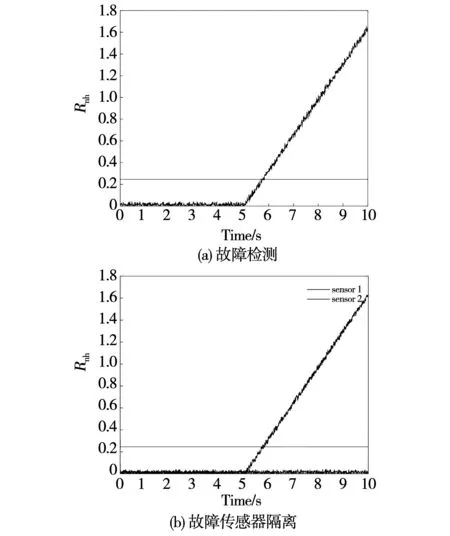
图5 某工况下转速传感器漂移故障检测结果
4 结论
本文建立了改进的平衡流形展开模型并探讨了基于容积卡尔曼滤波双通道传感器故障检测诊断及隔离方法。结果表明,该方法能够有效检测出传感器的故障并进行隔离,在数据存储和计算量的要求上相对较小,更适用于机载设备。得出以下结论:
(1)通过引入相似参数的方法,将多维调度变量转化为一维的折合调度变量从而实现平衡流形空间维度压缩,在不改变原有建模过程的前提下,通过相似化处理模型建立了多输入量的展开模型。
(2)利用双传感器之间的残差进行故障隔离,可避免利用阵列间的比较进行故障隔离,降低了数据存储和计算量的要求。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2021年7期)2021-08-13
昆明医科大学学报(2021年4期)2021-07-23
就业与保障(2021年23期)2021-04-06
厦门大学学报(自然科学版)(2021年1期)2021-02-02
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
电子制作(2019年23期)2019-02-23
科技风(2018年1期)2018-05-14