
零相移带通滤波器在摆轮静平衡系统中的应用
2021-07-13 03:18:32许连阁
信息记录材料 2021年6期
蔡 月,许连阁
(辽宁机电职业技术学院自动控制工程系 辽宁 丹东 118009)
1 引言
手表在日常生活中非常普及,人们在选购手表的时候,通常以走时是否精准为第一要求,而摆轮运转的平均与否直接影响手表走时的精确度。因此,摆轮是否平衡,是手表是否走时精确地关键。若摆轮出现不平衡情况,则需要对其进行加工,从而消除摆轮的偏重量,实现摆轮静平衡。在这一过程中,需要将摆轮偏重传感器输出的偏重数据以及偏重角度采集并进行处理。
目前的摆轮静平衡系统的数据采集与处理,应用的是硬件搭建的滤波器,但是表摆轮偏重量数据并不是在静态环境下测得的,因此,难免会受到外界环境以及传感器噪声的影响,导致测量数据中包含大量不同性质的噪声。由于摆轮静平衡系统对于信号调理过程要求极高,包括低滤波器、高Q值带通滤波器,以及对相位及其敏感的角度检测等要求非常高,只有这样,才有可能设计出精度高的钟表。因此,仅仅用一般的滤波器进行数据的处理,是达不到要求精度的,只有高精度的滤波器才可以达到要求。但是能够达到相对高精度的硬件滤波器又存在着结构复杂、成本价格以及维护价格昂贵、且精度随着零件的磨损而逐渐降低;同时随着科技的发展,很多先进的算法被研究出来,但是在硬件滤波器上却不能实现。为解决上述问题,本文针对手表摆轮静平衡系统中的偏重传感器输出信号处理,设计了一款在MATLAB软件上就能实现的零相移带通滤波器,给出了其设计方法与仿真模型的参数设置,并用仿真结果证明了它的正确性与有效性。
2 摆轮静平衡系统描述
摆轮静平衡系统结构主要包括:微振动传感器、激光发射反射系统、数据采集前端硬件电路、模拟量数据采集卡、开关量输入输出卡以及工控机。其中,微振动传感器与所述激光发射反射系统均安装在摆轮支架上,微振动传感器支架部分结构示意见图1。
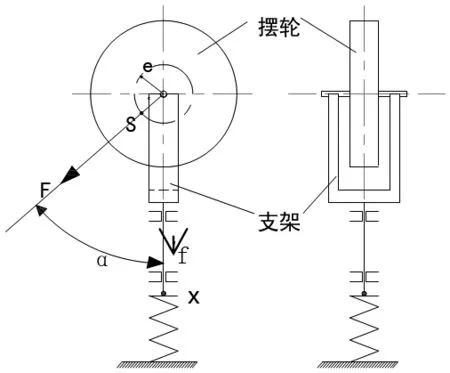
图1 微振动传感器支架部分结构示意图
微振动传感器,用于采集摆轮偏重量信号;激光发射反射系统,用于采集摆轮的角度基准信号;数据采集前端硬件电路将所述摆轮偏重量信号进行两级放大,得到放大后的摆轮偏重量信号,以及将角度基准信号进行两级放大,得到放大后的角度基准信号;模拟量数据采集卡,用于将放大后的摆轮偏重量信号传输至所述工控机;开关量输入输出卡,用于将所述放大后的角度基准信号传输至所述工控机;工控机利用零相移带通滤波算法对放大后的摆轮偏重量信号进行处理得到滤波后的摆轮偏重量信号,并将滤波后的摆轮偏重量信号与放大后的角度基准信号经差值比较算法进行比较得到角度差值。在工控机上安装MATLAB软件,并在该软件中实现数据的处理[1]。以上工作流程见图2。
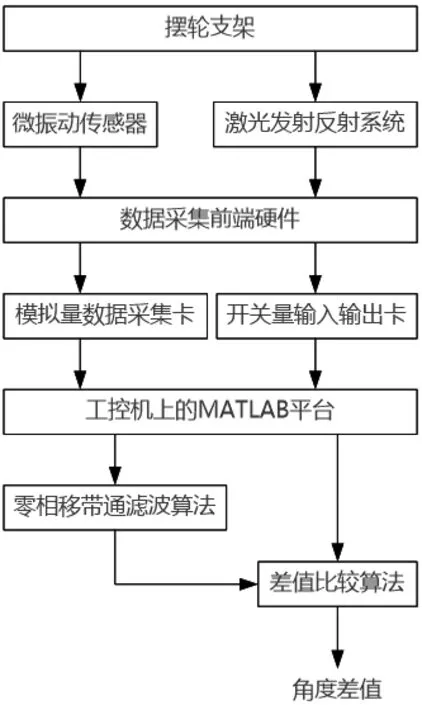
图2 摆轮静平衡系统工作流程
3 零相移带通滤波器的工作原理
零相移滤波器的工作原理为:将需要滤波的信号传送至零相移滤波器,该信号的相位不发生变化,因此,零相移滤波器的系统函数,其相位响应为零。这一过程的实现方法是:对信号序列进行正向滤波,将滤波后的结果进行信号序列的翻转,再对得到的结果进行正向滤波,最后再进行信号序列的翻转,得到的信号即为相位不发生变化的输出信号[2]。零相移滤波结构图见图3。

图3 零相移滤波结构图
对信号序列进行翻转是指按照时间顺序对该信号进行翻转,得到新的信号序列。具体翻转过程如下。
设某个信号序列为{x(n)},n=1,2,…,n0,其长度为有限长度,即为n0。设翻转后的信号序列为{y(n)},n=n0,…,2,1。若将信号{x(n)}进行延拓,即将其定义域扩大至整个x轴,得到其表达式如公式(1)所示。

同理,将翻转后得到的信号序列{y(n)}进行延拓,即信号扩大至整个时间轴,得到y1(n)。由于定义域为整个时间轴,因此,应用双边Z变换,对x1(n)进行双边Z变换,可得到如式(2)所示表达式:

应用双边Z变换,对y1(n)进行双边Z变换,可得到如公式(3)所示表达式:

从式(2)和式(3)可以得到以下结论:对翻转后的y1(n)的信号序列进行双边Z变换后,其变换结果为X(z-1),即为X(1/z)。
设滤波器的传递函数为H(z)。从图3所示的零相移滤波器结构图可以得到,零相移滤波器的输出为:当|z|=1,即z=ejθ,代入式(4)中,得到如式(5)所示的表达式:


由于式(4)所示表达式中的H(z)为实系数等式,设H(ejθ)的复共轭为H*(ejθ),由此可得到如式(6)所示表达式:

将式(6)代入式(5),整理后得到如式(7)所示的表达式:

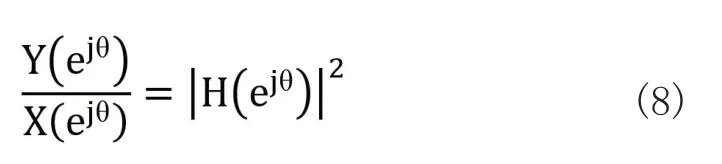
从式(7)中可以看出,输出信号Y(z)在幅值上是输入信号X(z)的|H(ejθ)|2倍,但在相位上没有任何变化,因此,实现了零相移滤波功能。由式(7)可以得到零相移滤波器的传递函数,即:
4 仿真与结果分析
4.1 仿真软件介绍
MATLAB软件是美国MathWorks公司出品的一套功能极其强大的商业数学软件,用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境。为验证本文设计的零相移滤波器的有效性,在该软件中进行零相移算法的编写以及仿真,并将数据处理前后的波形图进行对比。
4.2 结果与分析
图4为原始的摆轮偏重量信号,图5为经过基于巴特沃斯的零相移滤波器处理后的摆轮偏重量信号。从这两张图片可以看出本文设计的零相移滤波器基本上消除了摆轮偏重量信号的噪声[3]。

图4 原始的摆轮偏重量信号

图5 基于巴特沃斯的零相移滤波器处理后的摆轮偏重量信号
猜你喜欢
传感器与微系统(2022年4期)2022-04-12 08:37:44
物流技术与应用(2021年7期)2021-08-11 02:44:14
铁道通信信号(2020年12期)2020-03-29 06:22:00
科学与技术(2019年5期)2019-04-23 06:49:52
装备制造技术(2019年1期)2019-04-22 07:29:22
制造技术与机床(2018年11期)2018-11-23 01:08:02
中国修船(2017年6期)2017-12-22 00:45:01
上海大中型电机(2017年3期)2017-11-13 03:38:54
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:07
上海大中型电机(2014年4期)2014-07-24 19:00:30
