
无线传感器网络中的一种虚拟力算法研究
2021-07-13 03:19:12胡汀
信息记录材料 2021年6期
胡 汀
(湖南广播电视大学信息学院 湖南 长沙 410004)
1 引言
无线传感器网络(Wireless Sensor Network,WSN)是由大量静止或移动的传感器以自组织和多跳的方式构成的无线网络,实现了数据的采集、处理和传输三种功能,被广泛应用于军事、救灾、工农业生产等领域[1]。无线传感器网络内传感器节点主要有三种部署方式:确定位置的节点部署、随机抛洒且位置固定不定的节点部署和随机抛洒且节点可移动的部署。目前,采用随机抛洒且节点可移动部署的无线传感器网络最多,因为这种无线传感器网络使用灵活,适用面广。但是,这种部署方式却存在节点不均匀、容易形成覆盖空洞等问题。
Zou等[2]最早提出虚拟力算法(virtual force algorithm,VFA),将虚拟力的概念应用于节点的动态分析,节点之间的受力取决于节点之间的距离,却没有考虑节点的移动出界等问题。Howard等[3]把势能概念运用到虚拟力的分析中,实现了恶劣环境下的网络覆盖,却没有充分考虑网络的连通和算法的收敛。Chen等[4]提出了改进的虚拟力算法,对传统虚拟力模型进行了一定程度上的改进,却没有考虑传感器网络范围内的障碍物问题。REN等[5]比较了四种虚拟力模型,对各个参数进行了性能测试,也没有考虑传感器网络范围内的障碍物问题。针对以上虚拟力模型与算法的研究,本文提出了一种改进的虚拟力模型,确保无线传感器节点不会移动出界。
2 虚拟力算法的基本原理
虚拟力算法在无线传感器网络中的使用,是将物理学力学势场中的万有引力概念引用至无线传感器网络,网络中的所有节点抽象成力学势场中的粒子,那么传感器节点之间将存在着虚拟作用力(以下简称虚拟力)的作用,虚拟力可能是两种不同的力,即:(1)吸引力;(2)排斥力。
在网络部署优化过程中,节点依据自身受力情况不断移动,直到受力平衡或到达边界时为止。
3 虚拟力算法
3.1 基本假设
(1)监测区域为二维矩形平面,监测区域内的传感器节点随机部署且可移动,每个节点的传感范围都是半径为Rs的圆,所有的传感器节点性能相同,都有相同的传感半径Rs和通信半径Rc。(2)传感器节点利用GPS或者其他定位算法获取节点自身的坐标信息,也可以获得相邻节点之间的距离关系。(3)每个节点包含一个移动执行器,可以保证节点在移动区域内自由移动。每个节点包含相同的初始能量,节点在移动过程中也会消耗一定量的能量。
3.2 节点感知模型
在二维矩形监测区域内,若源节点s和目标节点t的位置坐标分别为和,节点感知半径为Rs,则目标节点t被源节点s感知到的概率为[6]

式中,d(s,t)是源节点s和目标节点t之间的欧式距离,可表示为

节点感知模型见图1,目标节点1t位于圆内,则,源节点s能感知到目标结点t1;目标节点t2位于圆外,则p(s,t2)=0,源节点s不能感知到目标结点t2。

图1 节点感知模型
3.3 改进虚拟力算法
3.3.1 传统虚拟力模型
在Zou等提出的传统虚拟力模型中,传感器节点i感知范围内的相邻节点集合为S1,假设传感器节点i与节点j之间的距离dij大于事先规定的阈值Dth时,互相吸引;而时,互相排斥。则两个节点之间的受力公式[7]为:

其中,dij表示节点i与节点j之间的欧式距离;αij表示节点i与节点j之间的方向角;wα表示节点i与节点j之间的虚拟吸引力;wγ表示排斥参数;Dth是根据实际网络运行状况设置的距离阈值[8]。
如图2所示,当覆盖率 1α< 时,监测区域没有被传感器节点完全覆盖。此时,距离阈值的计算公式为:

图2 距离阈值

当覆盖范围α≥1 时,整个监测区域被完全覆盖,距离阈值的计算公式可表示为:

3.3.2 区域边界对节点的排斥效应
从传统虚拟力模型可以看出,网络中的节点在不同的力的作用下有可能会移出监测区域,形成无用的节点,这也是传统虚拟力算法最主要的缺陷。
因此,在上述传统虚拟力模型的基础上,加入区域边界对节点的排斥效应,以保证监测区域内的节点不会移动出界。假设节点之间没有排斥,则存在边界b对节点 的虚拟力:

其中,dib表示节点i与区域边界b的距离;wb表示表示边界b的斥力参数;Dth−b表示节点i与区域边界b之间的距离阈值(一般设置为Dth/2)。
前面已假设监测区域为二维矩形平面,因此,节点会受到二维矩形平面4个边界作用力,4个边界区域的集合为S2,令x1、x2、y1、y2分别表示x轴与y轴的4个方向,传感器节点i受到的4个边界斥力的合力为:

3.3.3 障碍物对节点的虚拟力
实际使用中的无线传感器网络并不能避免障碍物的存在,所以定义障碍物对节点的虚拟力为排斥力,保证节点碰到障碍物时能主动避让。假设传感器节点i感知范围内的障碍物集合为S3,则障碍物obj对传感器节点i的排斥力计算公式为:

式(8)中,wob表示障碍物obj对传感器节点i的排斥力系数;s(i)是传感器节点i的坐标;s(obj)是障碍物obj的坐标;di−obj是障碍物obj与传感器节点i之间的垂直距离;Dob障碍物obj与传感器节点i之间的距离阈值。
3.3.4 改进虚拟力算法
改进虚拟力算法在考虑相邻传感器节点j与节点i之间虚拟力的基础上,引入式(7)所示的区域边界斥力,以及式(8)所示的障碍物对传感器节点i的虚拟力,则传感器节点i所受到的x方向合力为:

式(9)中,Fij_x表示相邻传感器节点j对节点i在x方向上的作用力,Fib_x表示边界斥力合力对节点i在x方向上的作用力,k表示相邻节点的数目,m表示相邻障碍物的数目,Fi−obj_x表示障碍物obj对传感器节点i在x方向上的作用力。
传感器节点i所受到的y方向合力为:

式(10)中,Fij_y表示相邻传感器节点j对节点i在y方向上的作用力,Fib_y表示边界斥力合力对节点i在y方向上的作用力,k表示相邻节点的数目,m表示相邻障碍物的数目,Fi−obj_y表示障碍物obj对传感器节点i在y方向上的作用力。
传感器节点i所受到的虚拟力合力计算公式为:

4 节点移动与位置更新
传感器节点i在上述虚拟力合力的作用下,不断移动,直到受力平衡时,传感器节点达到稳定状态。节点i移动到的新位置在x方向和y方向上投影为:

其中,Xiold表示节点i移动前的位置在x方向上的投影;Fi_X表示节点i所受到的虚拟力合力在x方向的投影;Fi_Y表示节点i所受到的虚拟力合力在y方向上的投影;Fi表示节点i所受到的虚拟力合力;Maxdis表示节点的单位最大移动距离。
5 改进虚拟力算法流程
改进虚拟力算法主要流程如图3。
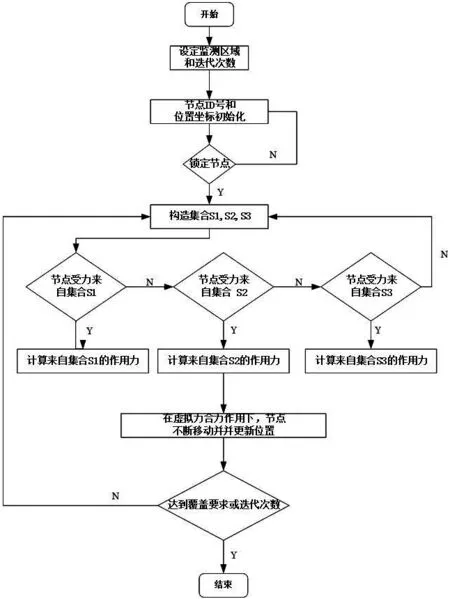
图3 虚拟力算法流程图
6 结论
在传统虚拟力模型中,由于没有对节点移动出界的边界条件进行限制,节点有可能在虚拟力作用下移动出界,对传感器的能耗造成巨大的浪费。本文在传统虚拟力模型的基础上,引入了监测区域边界对传感器节点的排斥力,确保传感器节点不会出界,一定在传感区域内。同时,本文在改进虚拟力算法时考虑了障碍物的存在,因为实际应用过程中有可能会出现障碍物,导致网络性能的下降。如何对改进虚拟力算法进行仿真分析是下一阶段研究的重点。
猜你喜欢
儿童时代·幸福宝宝(2021年11期)2021-12-21 06:18:46
无线互联科技(2021年4期)2021-04-21 10:12:36
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
小猕猴智力画刊(2019年3期)2019-04-19 00:01:52
电子制作(2018年23期)2018-12-26 01:01:08
证券法律评论(2018年0期)2018-08-31 02:33:08
电子制作(2016年15期)2017-01-15 13:39:03
外语学刊(2014年6期)2014-04-18 09:11:49
城市道桥与防洪(2014年5期)2014-02-27 07:26:44
