配电网灾后动态抢修滚动优化决策方法
2021-07-13 08:44方健王红斌刘育权何嘉兴田妍张行
南方电网技术 2021年5期
方健,王红斌,刘育权,何嘉兴,田妍,张行
(南方电网中低压电气设备质量检验测试重点实验室(广东电网广州供电局),广州510620)
0 引言
近年来,极端灾害频发,导致国内外多次大规模停电事故,其逐渐成为电网安全的主要威胁[1 - 2]。相比输电网,配电网一般保持开环运行,具有辐射状拓扑结构,其中上游设备故障将直接导致下游用户停电[3]。台风、强对流、洪水等自然灾害均可能引发线路、杆塔和变电设备的故障,进而导致多馈线故障停运,造成严重的用户停电损失[4 - 5]。因此,有必要开展极端灾害后配电网快速恢复决策方法研究,提升电网应急抢修的时效性,加速关键负荷恢复供电,保障灾害后用户可靠、持续用电[6]。
为了提升配电网应对极端灾害能力,提升供电恢复效果,已有研究提出了多种优化防灾和恢复决策方法。首先,在配电网防灾方面,相关研究工作重点是根据灾害预测优化调配应急物资和人员。文献[7]提出了一种基于贝叶斯网络的台风灾害下配电网停运概率计算方法,可根据天气预报和历史灾情快速预测灾害下配网停运范围。文献[8]提出了一种应急资源配置方法,可有效提升配电网关键设备抗灾水平,减少资源转运代价。文献[9]提出了灾前预防的三层鲁棒优化模型,统筹安排配电网中多类型的应急供电设备和抢修物资。上述工作给出了配电网优化防灾方案,为灾后快速抢修复电提供了基础物质条件。其次,在灾后快速抢修复电方面,相关研究重点关注配网拓扑重构和分布式电源应急供电等技术。文献[10]提出了配电网灾后恢复的两阶段模型,在不同阶段分别实现拓扑结构识别和微网机组出力调度,以实现关键负荷的快速恢复。文献[11]针对配电网灾后恢复应急指挥体系的构建问题,论证了分布式电源和微电网在灾后应急供电方面的作用。文献[12]建立了人力修复、拓扑重构和分布式电源的协同恢复模型,综合考虑多种灾后恢复手段。文献[13]在灾后人员物资调派过程中考虑了交通阻塞带来的影响。上述研究中对应急抢修的建模较为简单,缺乏对应急人员动态部署调配决策机制的深入探讨。
事实上,人力抢修是配电网完全恢复的关键举措,其完成效率直接影响用户供电可靠性及灾致停电损失。然而,由于灾情勘察耗时耗力,配电网受灾实际故障点判定较为困难,进而导致直接参照停运状况容易出现抢修队派往无故障区域错配问题,降低了抢修效率。另一方面,抢修队伍进度存在差异,若未能及时、动态优化抢修任务重新分配,则可能造成抢修队伍出现闲置现象,弱化抢修资源利用率。实际工程中上述问题常有发生,限制了配电网灾后恢复能力的提升。
为提升灾后恢复速度和人员抢修效率,避免出现抢修队伍的错配或闲置现象,本文提出了一种配电网灾后抢修的滚动优化决策方法。首先,分析了灾后配网停电故障的典型原因,根据负荷停运信息给出了已探明故障点的判定方法。进一步,建立了单轮抢修的优化决策模型,以最小化配电网失电负荷加权能量损失为目标,优化抢修队任务分配方案;最后,考虑故障抢修、节点复电和新故障点推断等环节的信息更新,设计滚动优化决策流程,实现抢修任务动态优化分配。针对IEEE 123节点系统开展仿真验证,测试结果说明所提方法可有效提升配电网抢修效率,减少极端灾害下配电网停电损失。
1 灾后轮动抢修基本思路
1.1 灾后抢修基本原则
配电网在遭遇极端自然灾害时,可能会出现大量线路故障,进而引发大面积负荷失电情况。此情况下,即便使用了拓扑重构和应急供电等技术,依然存在数量众多的失电节点,亟待抢修恢复。若无差别地派遣抢修人员,必然会浪费较多人力。然而,由于配电网拓扑结构呈辐射状,同一馈线上若出现多处故障,会导致故障定位较为困难,排查耗时增加,造成应急抢修的决策矛盾。准确的故障排查可以提升抢修效果,避免浪费抢修人力,但故障排查本身也要消耗大量的时间和人力,难以先导完成。
为了破解上述矛盾,可采用动态抢修策略,即集中人力快速修复已探明的故障点,恢复相关故障线路供电,并根据恢复后下游的负荷停运情况,进一步确定下游新的故障点。执行此策略,可将人力优先集中于已探明的故障点,避免将部分人力派往故障不明区域造成无谓的浪费。同时,抢修人员适度集中可大幅加快故障区域修复,提高系统整体恢复效率。
1.2 已探明故障点
一般地,考虑到配电网开环运行的特点,对配电网中的一个节点而言,若其出现停电状况,有以下2类原因:1)该节点同其上游相邻供电节点之间供电路径出现了故障;2)该节点的上游相邻节点的更上游侧出现了故障。
在灾后,停电用户通过客服系统反馈相关信息。据此,配电网应急中心可快速了解系统中负荷受灾停运情况,但难以精确获知具体的故障发生点。然而,若一个节点的上游节点正常供电,而自身却处于停电状态,则可基本断定造成该节点失电的原因不应为原因2,而应为原因1。下文将此类停电节点称为“已探明故障点”。进一步,记配电网第i个节点为ni,f(ni)=0表示节点i处于停电状态;f(ni)≠0则为正常供电状态。以Pa(·)表示上游相邻节点,即若节点ni和节点nj相邻,且节点ni处于上游侧,故ni=Pa(nj)。当且仅当式(1)成立时,节点ni是已探明故障点:
f(Pa(ni))=1∧f(ni)=0
(1)
需要注意,一个节点是否为已探明故障点是动态变化的,当一个故障抢修完毕,原有的已探明故障点可能转化为正常供电节点,而原有的一般停运节点可能会转化为已探明故障点。
1.3 节点抢修工时
对于已探明故障点,尽管已确定其故障出现于自身和上游相邻节点之间,但是由于配电网中相邻供电节点存在一定的地理距离,且受自然环境、受灾程度等影响,实际抢修仍需大量时间。为简化人员抢修的数学模型,提出以下两条基本假设:1)抢修耗时同参与抢修的总人数成反比。令某节点单位人力所需抢修工时为Tj,则N个抢修人员共同施工完成抢修的耗时期望为Tj/N。2)抢修耗时同受灾程度、故障区段线路长度成正相关。无论是架空线还是地下电缆,一旦出现故障都需要经过较为严格的巡线排查才能完全修复。因此,本文中假设失电节点供电路径抢修恢复的耗时与对应故障区段线路长度成正比,其中比例系数可以从历史数据统计获得。
后续优化决策中,可认为节点抢修所需工时Tj随抢修进度的推进而线性递减。当该节点完成抢通时,该值减至0。此时意味着节点与其上游相邻节点的供电线路被重新恢复供电,相应的若干下游负荷节点也恢复供电;若下游还有故障,则会在被恢复节点下游出现新的“已探明故障点”,即随着当前节点复电成功,基于下游停电负荷的反馈信息,可定位出故障区段可知的待抢修节点。
1.4 节点加权负荷量

(2)

显然,恢复节点ni的供电路径不一定能使下游负荷完全恢复,但其潜在收益依然很大。尤其是快速抢通下游负荷价值大的节点,可有助于排查下游节点故障,优化安排新一轮抢修计划。
2 单轮优化抢修调度模型
在获知配网停运和抢修队伍信息后,需要快速决策给出最优的抢修调度方案,考虑各抢修队位置、已探明故障点及其节点抢修工时等信息,以最大化抢修总体收益为目标,优化设定各抢修队当前工作任务。
2.1 目标函数
在单轮优化抢修的目标是最大化抢修收益,即减少失电负荷加权能量损失,对应优化目标函数如式(3)所示。
(3)
式中:n为待修复的节点数量;tj为节点nj抢修复电所需工时,其计算方法由后文式(5)给出。需要注意的是,单轮抢修决策时,由于下游节点相关故障情况不明确,式(3)期望最小化系统灾后损失加权能量的上界。
2.2 约束条件
单轮抢修优化算法有以下3类约束。
1) 单一任务约束
每个抢修队至多被派往一个节点处去抢修,如式(4)所示。
(4)
式中m为抢修队的总数。
当抢修队i被派往某节点k抢修时,此时xik=1,而xij=0(j≠k),故Σxij=1;若某抢修队待命,未派往任何节点,则xij=0,故Σxij=0。特别是当故障点都在上游,而该队位置靠近下游节点,应等待上游抢修完毕后查明下游状态再作调动,此时抢修队可能出现待命情况。
2) 节点修复时间约束
每个节点可能由多个队伍共同维修,此时节点抢修工时Tj由多个队伍共同分担。分担时亦需考虑各抢修队开始抢修耗时,如式(5)所示。
(5)
式中:对于第j个已探明故障点,xij为1表示第i个队伍被派去抢修该节点;dij为各抢修队到故障节点的距离;dij/v为第i个抢修队赶往该节点的时间;(tj-dij/v)为第i个抢修队实际抢修的时间,而每个抢修队每小时提供N个人工时。ε为取值较小的正常数,其作用是防止优化中出现无队伍赶往第j个节点而出现tj无穷大进而报错的情况。
式(5)为非线性约束,为此引入辅助变量对其进行线性化处理。定义辅助变量pij以代替xij(tj-dij/v),M为足够大的正数,用于限制辅助变量pij的范围。式(5)即可化为线性约束条件,如式(6)所示。
(6)
式中:xij=0时,式(6)第2与第3个式子恒成立(即pij大于足够大的正数且小于足够小的负数),第1个式子使pij=0;xij=1时,由于M为足够大的正数,因此式(6)第1个式子相当于对pij没有约束,而第2与第3个式子则使pij=xij(tj-dij/v)。
进一步,式(6)可转化为线性化形式,如(7)所示。
(7)
3) 派遣必要性约束
若抢修队伍行进在前往节点nj的路上,节点nj却已被其他队伍抢通,此时该抢修队需要调整任务,应当派往其他待抢修节点。此类约束可用式(8)表述。
(8)
式中:若xij为1,则表示队伍i被派往节点j,此时队伍i的到达时间为dij/v,节点j的修复时间为tj,因此抢修队i应在节点j完成修复前到达该节点并开始抢修;反之,若xij为0,表示队伍i并没有被派往该节点,因而约束等同于tj≥0,是个冗余约束,即节点j的恢复时间与抢修队i无关。
2.3 模型求解

3 多轮抢修滚动优化决策方法
灾后多轮抢修算法的总体流程图如图1所示,为简化分析,本文假定此时配电网已经完成可用的转供,并忽略应急供电资源。总体流程包括以下4个步骤。
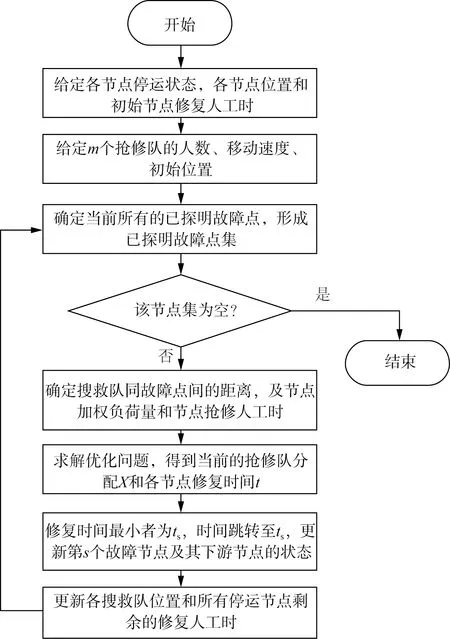
图1 多轮抢修滚动优化决策流程Fig.1 Flow chart of multi-phase repairing algorithm
1)初始化配电网及抢修人员信息。确定灾后配电网中节点停运状态,估计相关抢修工时;收集各抢修队信息,包括抢修队数量,各抢修队人数、初始位置、移动能力等。
2)依据当前节点停运状态,依据式(1)确定本轮所有已探明故障节点。假定已探明故障节点集合中有n个元素。若n为0,即不存在故障节点,所有节点均已恢复供电,此时退出算法;否则进行下一步。
3)依据各抢修队的当前位置,确定各抢修队到达各探明故障节点的距离,推算其路途耗时,计算各故障点所需剩余抢修工时。基于以上信息求解优化抢修调度问题,得到本轮人员分配方案及各节点预期恢复时间ts。
4)执行所得抢修方案,多抢修队配合抢通若干个节点供电路径。假设经过ts后,节点ns供电路径被抢通。节点ns复电后,下游相应节点的停运状态得到更新,批定新的已探明故障点。此时,更新各抢修队当前位置和各节点当前的节点修复人工时,执行步骤2)获得下一轮优化抢修方案。
关于相邻两轮优化跳转条件和已探明故障点更新的实现细节,需要说明的是,节点ns恢复供电后,可在不影响上游已恢复馈线正常运行的前提下,采用区段试供电方式对下游馈线健康状态进行测试,确定下游待抢修的故障点所在馈线区段。此时,若存在空闲抢修队伍,则应用图1所示滚动优化决策方法可动态调整抢修队伍的任务安排,提高抢修资源利用率和修复效率,减少系统负荷失电损失。
4 算例分析
4.1 算例参数
在修正后的IEEE 123节点系统上进行了仿真验证。测试系统拓扑图及故障场景如图2所示。

图2 改进IEEE 123节点拓扑及其故障场景Fig.2 Topology and fault case of improved IEEE 123
在图2中,黑实线表示正常供电线路,红虚线表示故障线路;黑点和红圈分别表示未停运和已停运的节点。其中线路(以线路下游侧端点的序号表示,下同)24、57、59、67、110这5段线路发生故障。造成共计68个负荷节点失电。节点间的实际距离按节点间直线距离简化考虑,5段故障线路长度分别为160.0 m、121.9 m、38.1 m、76.2 m、68.6 m。节点的负荷量及权重见附录表A1,相应的节点加权负荷量按式(2)计算。
灾后共有5个抢修队参与恢复供电作业,每队各10人。5队的初始位分别为(400 m,400 m),(1 000 m,400 m),(400 m,1 000 m),(1 000 m,1 000 m),(1 000 m,700 m);考虑灾后恶劣的道路条件和携带专业工具的需要,各抢修队的移动速度按1000 m/h考虑。结合广东某地电网实际工程经验数据,考虑该地历史受灾程度,节点抢修人工时与对应故障区段线路长度的比例系数取60 m对应1人工时。
4.2 多轮抢修方案
根据图2的实际故障场景。此时应急中心无法确定各故障点的数量和位置,仅可观测到68个负荷节点失电。此时采用本文提出的多轮抢修滚动优化决策方法,得到各轮的方案和抢修情况如表1所示。

表1 配电网灾后抢修方案Tab.1 Plan of repairing of distributed network after disasters
针对表1中各阶段抢修过程,具体分析如下。
1)在t=0时,结合故障场景图,仅有节点24和节点57是已探明故障点,此时抢修队1、3、4、5被派往节点57。抢修队2被派往节点24。直至0.95 h,完成节点57的抢修。首轮共恢复2个节点。
2)在t=0.95 h时,仅节点24和59是已探明故障点,此时抢修队1、3、4、5被派往节点59,抢修队2依旧继续抢修节点24。直至1.20 h,完成节点59的抢修。次轮共恢复57个节点。
3)在t=1.20 h时,仅节点24、67、110是已探明故障点,此时抢修队1、4、5被派往节点67,抢修队3被派往节点110, 抢修队2仍在抢修节点24。直至1.79 h,完成节点67的抢修。第三轮共恢复5个节点。
4)在t=1.79 h时,仅节点24和110是已探明故障点,此时抢修队1被派往节点24同之前开始抢修的抢修队2一同作业,抢修队4、5被派往节点110同之前开始抢修的抢修队3一同作业。直至2.23 h,完成节点110抢修。第四轮共恢复3个节点。
5)在t=2.23 h时,仅节点24是已探明故障点,抢修队3、4、5开始派往节点24同先前开始抢修的抢修队1、2共同作业。直至3.16 h,完成抢修。最后一轮共恢复1个节点。
需要说明的是,在以上恢复过程中,抢修队优先修复下游负荷节点更多的57号节点,而不是较为末端的24号节点,这在现实中是合理的。抢修57号节点有可能抢通更多的负荷,同时抢修57号节点为下游供电可进一步确定下游的停运情况,进而通过新的已探明故障点集确定故障所在区间,获取新的信息。在抢修的过程中,可能出现有些抢修队在原地待命,这也是比较合理的。对于有些抢修队自身所处位置偏下游,而故障点(已探明故障点)则处于配网偏上游处,与其长途奔赴,不如在原地等待其他抢修队完成上游抢修探明下游故障点时再作快速响应,总体上可能实现更高的抢修效率,这也体现了本算法对不确定性的考虑,能够实现应急人员的动态分配。
4.3 滚动优化抢修效果
在68个节点失负荷的情况下,通过5轮抢修,在3.16 h内完成了抢修。作为对比,还可以采用平均分配抢修资源的作业安排,即对每一个故障点安排同样数量抢修人员,可根据距离远近逐步排查和修复停运负荷节点。对于图2的算例,各队自上游向下游检查各停运节点,分别在3 h、3.2 h、4.2 h、7.5 h和9.6 h时分别确定了故障点24、57、59、67、110的位置并完成修复。图3给出了所提方法和平均分配抢修资源作业方案对应的系统供电恢复过程对比。
图3中曲线表示灾后配电网供电负荷总量逐步恢复过程。在曲线上方围成的面积为整个抢修过程的失电负荷加权重能量损失,本文方法下的加权损失显著小于传统平均分配算法。可以看出,采用平均分配抢修资源策略会出现将队伍分配在非故障节点,造成队伍闲置。同时单一队伍抢修也会造成抢修效率低下。另一方面,采用本文方法,在拓扑意义上更为重要的节点将优先被抢修,这些节点将最先恢复供电,加速了后续恢复和勘察进程,完成全部抢修和恢复任务的时间仅为传统分配算法的三分之一。

图3 不同抢修方案恢复过程对比Fig.3 Contrast of the processes with different repairing strategies
5 结语
本文针对配电网灾后恢复中人员抢修调度中存在的错配和闲置问题,提出了一种配电网灾后动态抢修滚动优化决策方法。以减少全网停运负荷加权损失为目标,建立了单轮的抢修任务调度优化模型,给出加速已知故障线路修复和后续故障位置排查的抢修作业方案。进一步,根据抢修任务完成情况和故障推断结果更新,实施滚动优化,动态调整抢修队任务安排,实现抢修资源高效利用。算例测试表明所提方法相比传统平均分配资源方法更加高效,能充分发挥抢修队伍的作用,大幅减少配电网抢修恢复所需时间。后续研究将围绕应急抢修和移动储能车应急供电的协同优化策略展开。
猜你喜欢
纺织标准与质量(2022年2期)2022-07-12
煤气与热力(2022年4期)2022-05-23
长江大学学报(自科版)(2021年6期)2021-02-16
电子制作(2019年16期)2019-09-27
活力(2019年22期)2019-03-16
电子制作(2018年8期)2018-06-26
燃气轮机技术(2014年4期)2014-04-16
中国信息化·学术版(2013年5期)2013-10-09
数学大世界·小学低年级辅导版(2010年2期)2010-03-03
中国火炬(2009年2期)2009-07-24