
海底电缆检测方法发展现状综述
2021-07-13 08:44:36冀大雄周佳龙钱建华邵静张洪星
南方电网技术 2021年5期
冀大雄,周佳龙,钱建华,邵静,张洪星
(1.海洋电子与智能系统研究所(浙江大学海洋学院),浙江 舟山 316000;2. 上海遨拓深水装备技术开发有限公司,上海 201306;3. 舟山遨拓海洋工程技术有限公司,浙江 舟山 316000)
0 引言
海底电缆也常称为海缆,包括铺设在海底用加强保护套包裹的电缆、光缆和光电复合缆,在电能传输、跨海通信、海洋工程和新能源开发等领域具有其他手段无法替代的优势[1 - 2]。随着海洋资源调查和开发进程的加快以及海岛经济的发展,海缆在国内外的使用数量不断增加。据市场调研公司TeleGeography统计,截至2019年初,全球有约378条海缆在使用,总长度超过1.2×106km[3]。在国内,截至2017年,福建省10—220 kV的海缆长度就达到了约120 km;浙江省舟山市海缆的总长度就超过了500 km。海缆工程是海洋产业技术中最为复杂困难的大型工程之一[4],和陆地缆线相比,海缆故障查找难度大,修复时间长,修复费用高[5]。
受到自然灾害、器件寿命和海上作业的影响,海缆可能发生故障。一旦发生故障,不仅会引起国民经济的巨大损失,还会给国民的正常生活造成严重影响。2010年7月11日福建省莆田南日岛35 kV海缆故障,修复时间长达20 d,影响岛上1.3万多用户用电[6];2010年8月10日舟山嵊泗县海域的两条海缆被船只锚钩损坏,相关海岛大面积停电,约9万居民的生活和工作受到影响[7]。据统计,在2007—2018年间的海缆事故中,由船舶抛锚(43%)和渔船捕鱼作业(33%)引起的事故占绝大部分(超过75%),地质变化和磨损导致的事故各占10%,其余4%被归因于其他原因[8]。在美国电气和电子工程师协会(Institute of Electrical and Electronics Engineers,IEEE)海缆相关铺设规范中,锚害被认定为造成海缆损坏的首要原因[9]。此外,受浊流、海啸、地震等具有区域性、动态性、不可预测因素的影响,海缆的位置、埋设深度和裸露状态可能发生变化,如受到洋流作用时海缆的表层会被冲刷,可能裸露于海底甚至在海底悬空,使海缆的安全运行受到极大威胁[10]。
为了避免海缆突发故障影响国民正常生活、国家经济发展和领土安全,除了临检外,还需要定期排查有可能发生悬空或裸露以及被海水侵蚀的海缆段落,获取海缆路由、埋深、故障信息以及周围环境状况等基本要素,及时准确地对海缆进行风险评估、维护和维修。本文从宏观层面的检测手段和微观层面的检测技术2个角度,对国内外海缆检测方法的发展现状进行归纳和分析,梳理了目前海缆检测方法存在的问题,指出了未来发展趋势,期望为我国海缆检测方法的发展提供参考和依据。

表1 5种检测手段对比及关键技术Tab.1 Comparison of five detection methods and their key technologies
1 海缆检测手段
由于海水深度和海缆性质各不相同,海缆铺设方式不尽相同,其检测手段也不同。目前常用的海缆检测手段有人工瞭望、巡视,海洋“拖鱼”,潜水员下潜,水下机器人搭载,海岸监测站等。其优势、不足与关键技术见表1。
1.1 人工瞭望、巡视
目前,国家电网公司主要通过设立瞭望台,依靠专业人员瞭望、巡视来实现对海缆运行状态的24 h不间断监测,对海缆受损进行预防和应急处理。然而,海缆铺设长度一般从几千米到几万米,海面上缺少显著的路由标志,若仅仅依靠人工瞭望、巡视,不仅值班人员的劳动强度大,而且不能及时准确地获得海缆的运行状态,无法准确判断海缆的结构是否损伤及损伤的程度。因此常存在因漏报或误报而导致海缆未得到及时维修而发生故障的情况。
1.2 海洋“拖鱼”
海洋“拖鱼”是指采用常规的水面船只使用缆绳拖曳将声学或磁学设备保持在一定深度对海缆进行检测,速率较高。但在航行过程中,受海底岩石的影响,“拖鱼”无法抵近海缆;受海浪、海流、拖曳船只航速、电缆长度、拖曳重量等共同影响,“拖鱼”可能发生起伏变化和左右摆动,导致入水深度控制及定位精度较差,检测精度无法保证,往往需要通过多次重复检测来提高检测结果精度。因此,如何准确获取“拖鱼”的空间位置,并将其控制在距海底特定高度是海缆检测的技术难点。对于高精度的测量而言,可以采用超短基线声学定位系统等装置对“拖鱼”进行精确的位置估算,但成本高,安装拆卸复杂,在没有此类装置或装置故障的情况下,大多采用直接概算法来估算“拖鱼”位置。文献[11]考虑到测船转向和测船偏离计划测线的情况提出了“拖鱼”位置的拖曳概算法。文献[12 - 13]结合拖曳概算法,形成改进的“拖鱼”水平位置改正方法,分析并提出了减小航速变化和海流对“拖鱼”定位影响的补偿模型,进一步研究了“拖鱼”的定位方法。文献[14]则进一步考虑了拖缆受力、海流影响和运动性质,仿真计算分析得出测船航速、海流效应对“拖鱼”运动的具体影响,如图1所示。


图1 测船拖点及“拖鱼”位置空间三维示意图Fig.1 Three dimensional diagrams of towing point and “tow-fish”
文献[15 - 17]分别分析了测船航速、调整动端力、收放拖缆对“拖鱼”深度的影响;综合考虑海水阻力、拖缆长度、航行速度和配重等因素下“拖鱼”入水深度的计算方法;施加附加质量和拖曳力时拖缆的水动力建模为“拖鱼”的控制提供理论基础。此外,在检测过程中还需要考虑拖曳船只船体对拖曳磁力仪的影响,根据海洋调查规范规定磁力仪探头距离拖曳船只的距离至少应达到船长的3倍[18];文献[19]将测船等效为一个磁偶极子,提出了确定最佳拖曳距离的理论计算方法,与实验法确定的结果相差小于1 m。
1.3 潜水员下潜
专业潜水员携带手持式检测设备可对海缆进行人工摸查和近距离检测。常见的手持式设备有国外Tinsley5930设备(工作深度小于100 m,埋设深度0.1~3 m,深度准确率为±5%)和CT-1设备(工作深度小于60 m),这些设备一般只适于浅水,定位精度不高。潜水员下潜的主要方法有饱和潜水和穿戴常压潜水服下潜,其中饱和潜水深度可达几百米,但国内商业饱和潜水能力比较落后。
由于海缆可能被泥沙掩埋或发生移位,潜水员对海缆的定位需要耗费较长时间,受体力和氧气量限制,潜水员对海缆的检测范围有限,且水下作业的成本和危险性高。随着技术的进步,为了降低水下调查成本和潜水员的风险,利用水下机器人对海缆进行跟踪检测,消除人工干预已成为一种趋势[20]。
1.4 水下机器人检测
水下机器人由于具备高效、大深度、长时间水下作业、可自动化等优点,在海洋开发和建设中备受青睐,并已广泛应用于海缆等水下设施的检测项目。近年来,工业发达国家相继开展了利用遥控操作车(remotely operative vehicle,ROV)对海缆进行外部检测的研究工作,少数国家已经开始利用自主式水下机器人(autonomous underwater vehicle, AUV)和水面无人艇(unmanned surface vehicle, USV)对海缆的自动跟踪检测。水下机器人检测系统可以搭载多种检测设备对海缆进行埋深检测、视频摄像、悬空裸露检测、故障检测、路由检测等。
水下机器人检测系统如图2所示。一般由传感器模块、导航模块、自动驾驶仪、推进系统、故障诊断模块、通信以及任务处理模块组成。

图2 水下机器人检测系统[21]Fig.2 Underwater robot detection system
标准的检测任务主要包括7个部分(图2(a)):任务开始后,水下机器人下潜;经过一系列机动操作后到达检测路径起始点;然后进入检测阶段,按照预先设定好的路径进行区域搜索或搜索并发现海缆后进行跟踪检测;在完成检测任务后,水下机器人上浮至回收区域或进入下一个路径起始点。
按照数据结构的抽象程度来看,水下机器人检测系统一般分为7个层次,如图3所示。

图3 水下机器人海缆检测系统数据传输结构Fig.3 Data transmission structure of underwater robot system for submarine cable detection
在采集层中需要考虑传感器的种类与配置。目前常搭载声、磁和光学传感器来海缆的信息采集,如文献[22]通过USV系统搭载磁传感器实现海缆检测,并结合动态路径规划算法使得USV系统能采集到足够的磁场读数样本进行处理。在理解层中,水下机器人对原始数据处理获得海缆与水下机器人的相对位置和方位,并结合姿态信息,对前方行驶环境做出可靠的分析和理解,并由规划层完成水下机器人的动作和路径规划,实现对事先规划好的路径或海缆路由进行跟踪。文献[23]基于三自由度欠驱动AUV,将海缆局部化方法与磁制导控制算法相结合提出了一种检测技术新框架,并通过仿真分析得到最终海缆与AUV的航向角、水平偏移均收敛至0,说明AUV能沿着海缆航行;文献[24]引入卡尔曼滤波算法估计动态障碍物,海上试验表明,该系统具有良好的性能实时路线规划能力。在控制层中,自动驾驶仪控制推进系统按照决策信息进行动作,其主要难点在于水下机器人的运动控制器设计,文献[21]通过多种海缆信息融合设计出模块化的Consys控制框架,并基于多种传感器检测到的海缆位置信息设置AUV的参考路径点,如图2(b)所示;文献[22]最后采用加权区间卡尔曼滤波器(WIKF)进行航向估计,实现了横摆率(yaw rate)均方根误差为0.147 8 °/s,航向均方根误差为6.123 4 °,均约为标准卡尔曼滤波器的1/4;文献[25]提出一种全驱动水下机器人管道跟踪的非线性视觉伺服控制方法,充分利用了控制设计中的全系统动力学,控制器直接使用图像特征作为反馈信息,而不需要利用车辆相对于环境的相对姿态,大大简化了在不确定或不断变化场景中的实现。通过对闭环系统进行了严格的稳定性分析,并通过仿真实验表明,即使在系统参数未知的情况下,所提出的控制方案也是有效的。
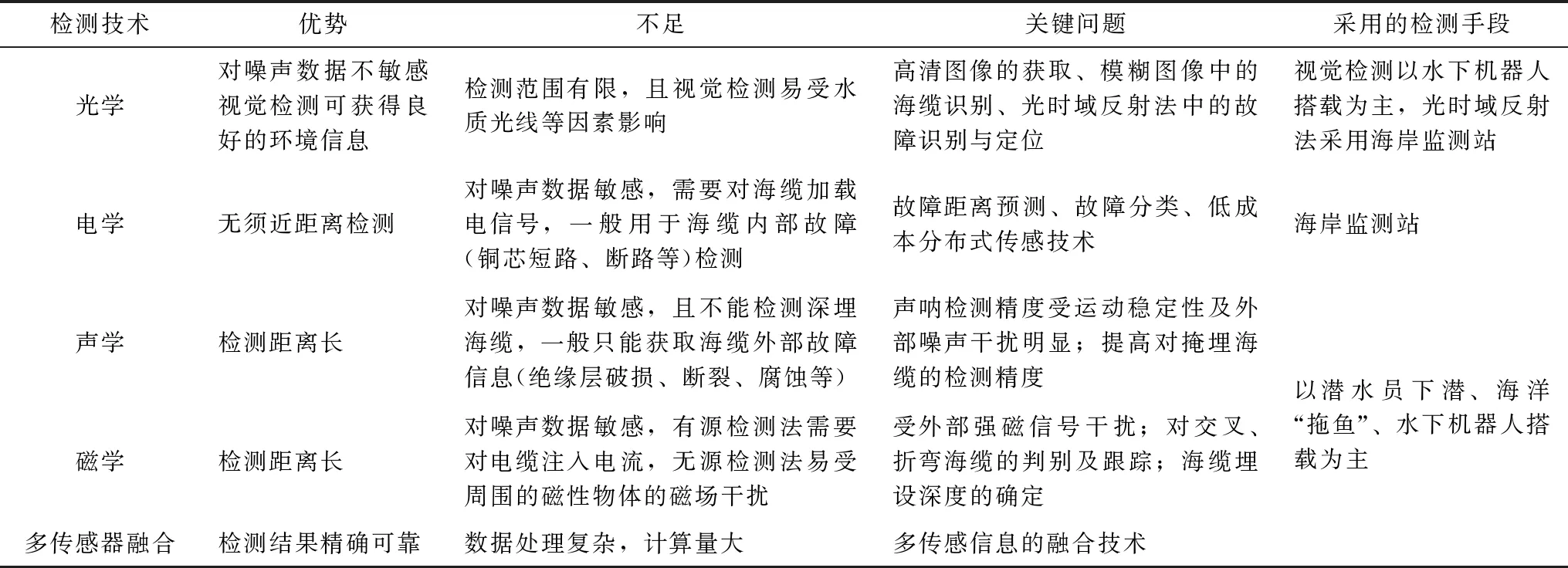
表2 4种检测方法对比Fig.2 Comparison of four kinds of detection methods
1.5 海岸监测站
海岸监测站指利用线路监控设备周期性地对所有中继器进行测试、记录并比较。当一个中继段内的海缆发生故障受到轻微损伤或断裂时,线路监控设备会立刻显示中继器中相应的指标变化的状况。主要有光时域反射法、电桥法、脉冲电流(电压)法及脉冲衰减法等技术。通过多种传感器测量可以构成海缆综合监测系统,实时监测海缆温度、应力、扰动、故障等参数[26]。海岸监测站可以周期性地监测海缆状态,但是测试范围只有一个中继段,对于海缆故障点位置的定位精度较差,只能获得故障点的大致位置,不能获取海缆周围的环境信息,也不能对存在风险进行评估。
2 海缆检测技术
目前海缆检测技术主要有基于光、电、声、磁学及多传感器融合检测,其主要优势与不足如表2所示。
2.1 光学检测
光学检测主要包括视觉检测和光时域法。在视觉检测中,首先需要在实际的水下环境中获取高质量海缆图像,但这是十分困难的,主要存在以下原因:1)在水质混浊、能见度低的海域,由于光波的衰减与反射,水下摄像头拍摄的图像容易模糊;2)随着时间的推移,流动的泥沙和周围的海洋植物可能将裸露的海缆遮掩,而且海床背景复杂,导致很难精准识别目标海缆;3)随着深度的增加,能见度不断降低,且常用光源无法提供清晰且均匀的照明;4)由于载体运动和外部干扰(如海流)的影响,高分辨率的摄像头必须靠近海缆才能够获取高质量的图像[27];5)对于水下机器人搭载检测而言,需要提高图片的处理速度来保证检测的实时性。
因此,在图像存在模糊、光线不均匀等条件下,图像处理成为视觉检测的关键步骤。在水下可见度良好的情况下视觉检测流程如图4所示。

图4 视觉检测算法流程Fig.4 Algorithm flow of visual detection
ROV获取的海缆视频通过逐帧的图像处理后能够得到海缆位置及宽度,进而确定海缆与ROV的距离。常用的线段检测方法一般基于霍夫变换判断是否存在海缆,并确定海缆边界[28],采用卡尔曼滤波估计海缆的状态[29],采用粒子滤波有效处理模糊图像,并预测海缆在下一帧的位姿[30]。文献[31]采用视觉检测,结合航位推算数据和AUV的位置信息,克服了海缆局部不可见、出现多条海缆时的选择等问题,并取得良好效果,采样时间达到了230 ms;文献[32]采用边缘检测和随机霍夫变换实现了海缆检测,与海缆边缘的平均偏差仅为5.63像素,平均处理时间达到了94.02 ms。在光线较差的情况下,也能达到160~180帧/s的处理速度。
近几年,机器学习算法不断发展,也逐渐出现在海缆(管道)图像处理算法中。如文献[33]分别采用多层感知器 (multilayer perceptron, MLP)和基于纹理信息的支持向量机(support vector machine,SVM)对海缆边缘信息进行分类,然后在使用形态学滤波和霍夫变换进行边缘修复和海缆(直线)检测。实验结果表明二维傅里叶变换结合MLP网络是最好的边缘分类方法,识别率为95.95%,灵敏性为98.80%,特异性为95.94%,特征提取时间为0.004 8 s。文献[34]利用深度卷积神经网络(ResNet- 50)对敷设在低光照环境下、不同状态的海底管道进行检测标注,并获得95.1%~99.7%标注精度,如图5所示。
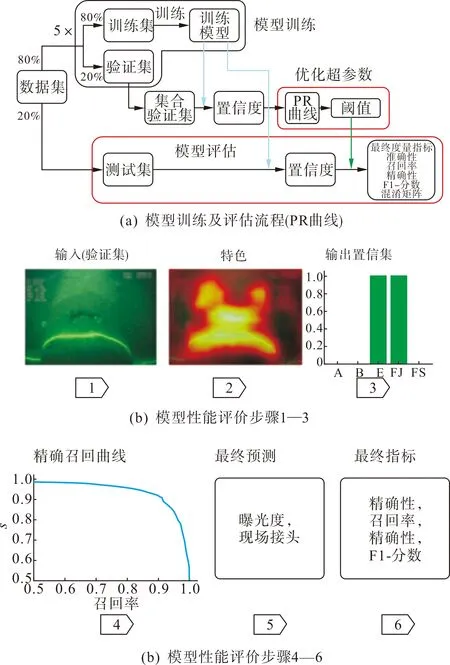
图5 神经网络模型及训练过程Fig.5 Neural network model and training process
光时域反射法通过瑞利散射、拉曼散射或布里渊散射原理实现分布式振动、温度、应变传感技术,进而完成海缆振动、温度、应力和应变等参数变化的定量测量[35 - 36]。该方法不仅能实时监测光缆或复合电缆的状态,而且能及时确定故障位置。由于布里渊散射原理具有较宽的测量范围而被广泛使用,但是数据采集过程十分耗时,且频率范围和分辨率受到限制[37]。
2.2 电学检测
电学检测主要有电桥法、脉冲衰减法、脉冲电流(电压)法、电容测试法等方法,一般在海岸检测站进行检测。电桥法是电缆故障诊断的最初的方法,因测试精度受线路长度、材质的均匀性等因素的影响较大,在海缆故障诊断领域中使用不是非常广泛。脉冲电流(电压)法可以测量海缆的高阻故障,其中低压脉冲法可以测量低阻、短路与短路故障,但其精度十分依赖滤波手段[38]。目前常用的方法是二次脉冲法和三级脉冲法,两者原理一样,可通过识别起始端和故障点可以判断出故障点的位置[36]。

图6 基于弯曲传感器的海缆检测系统Fig.6 Submarine cable detection system based on bending sensor
高效的数据处理算法是电学检测技术中是的关键之一。通过对数据中的异常进行分析识别,进而获取海缆故障点的位置及故障类别[39],如采用基于脉冲衰减法,利用小波变换[40]、希尔伯特黄变换(HHT)等对故障距离的预测,文献[41]为解决HHT中经验模态分解(EMD)存在的模态混叠问题,提出了改进集总经验模态分解(MEEMD)和 Teager 能量算子相结合的电缆故障行波检测方法,推导出一种不受波速影响的双端测距算法,仿真结果表明测距误差为0.042 4 km。此外,为减少电学检技术的使用成本,不少学者致力于引进新的电学检测技术,如文献[42 - 43]提出可弯曲传感器用于检测水下电缆形状的方案,通过事先纵向布置的弯曲传感器测量缆线弯曲和扭转数据,进而描述出缆线近乎实时的形状和位置,如图6所示。目前还没有将弯曲传感器用于海缆检测的工程案例,但其发展和应用为海缆检测技术提供了新思路。
2.3 声学检测
目前,声学检测是海缆检测领域的常用检测技术之一,主要采用侧扫声呐、多波束声呐、浅地层剖面仪、合成孔径声呐4种设备,以海洋“拖鱼”、水下机器人搭载为主要检测手段。表3总结了4种检测设备的工作原理和发展趋势,对其优势与不足进行了比较。目前,已有多款先进声学设备应用到海缆检测领域,如表4所示。在2011年广东省电力设计研究院应用侧扫声呐系统对琼州海底电力电缆进行检测[44],通过海底地貌影像分析判定了海缆路由的位置,但侧扫声呐的平面定位数据在恶劣海况、大水深条件、较强温跃层等情况干扰下,容易产生较大误差[45]。
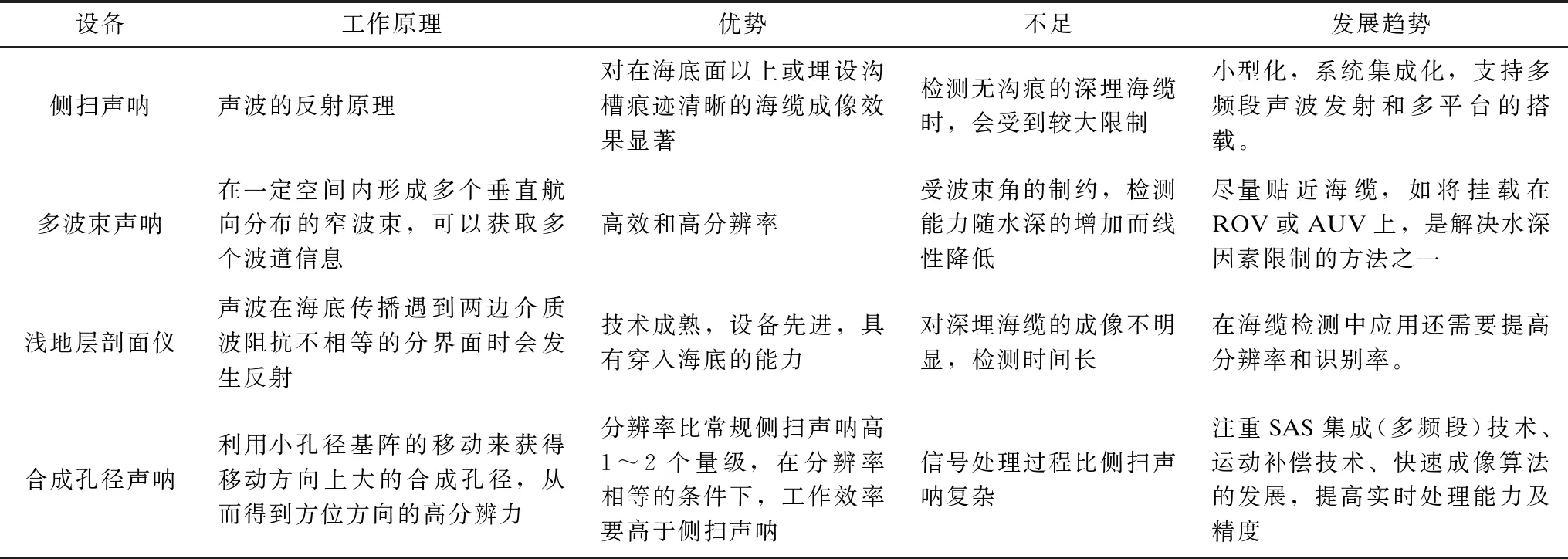
表3 4种声学检测技术对比Tab.3 Comparison of four kinds of acoustic detection technologies
由于海洋复杂环境和沉积物对声学成像的影响,声学图像中的海缆有时与海床区分并不明显,甚至被掩埋。文献[46]通过改进的霍夫变换,将线段的方向和距离在连续的侧扫声呐(side scan sonar, SSS)图像叠加获取海缆在声学图像上的概率热力图,提高了海缆检测置信度,并结合运动学模型实现了AUV对海缆的跟踪检测,结果如图7所示。文献[47]提出了一种基于多波束测深仪(MBES)和前视声纳(FLS)的AUV对海底管道进行自动检测的方案,提出了一种改进Otsu算法,与传统的分割算法相比计算效率提高了16%以上。为降低噪声影响,文献[48]以悬置、平置、平铺或悬置在管道沟内的存在形式作为分类标准,采用模糊识别方法得到各探测图的特征数据矩阵,对矩阵中的数据进行归一化处理,然后将模糊聚类分析和模糊贴近度法相结合,实现了对海缆SSS成像图的有效聚类。

表4 先进声学检测产品及主要性能参数Tab.4 Advanced acoustic detection products and main performance parameters
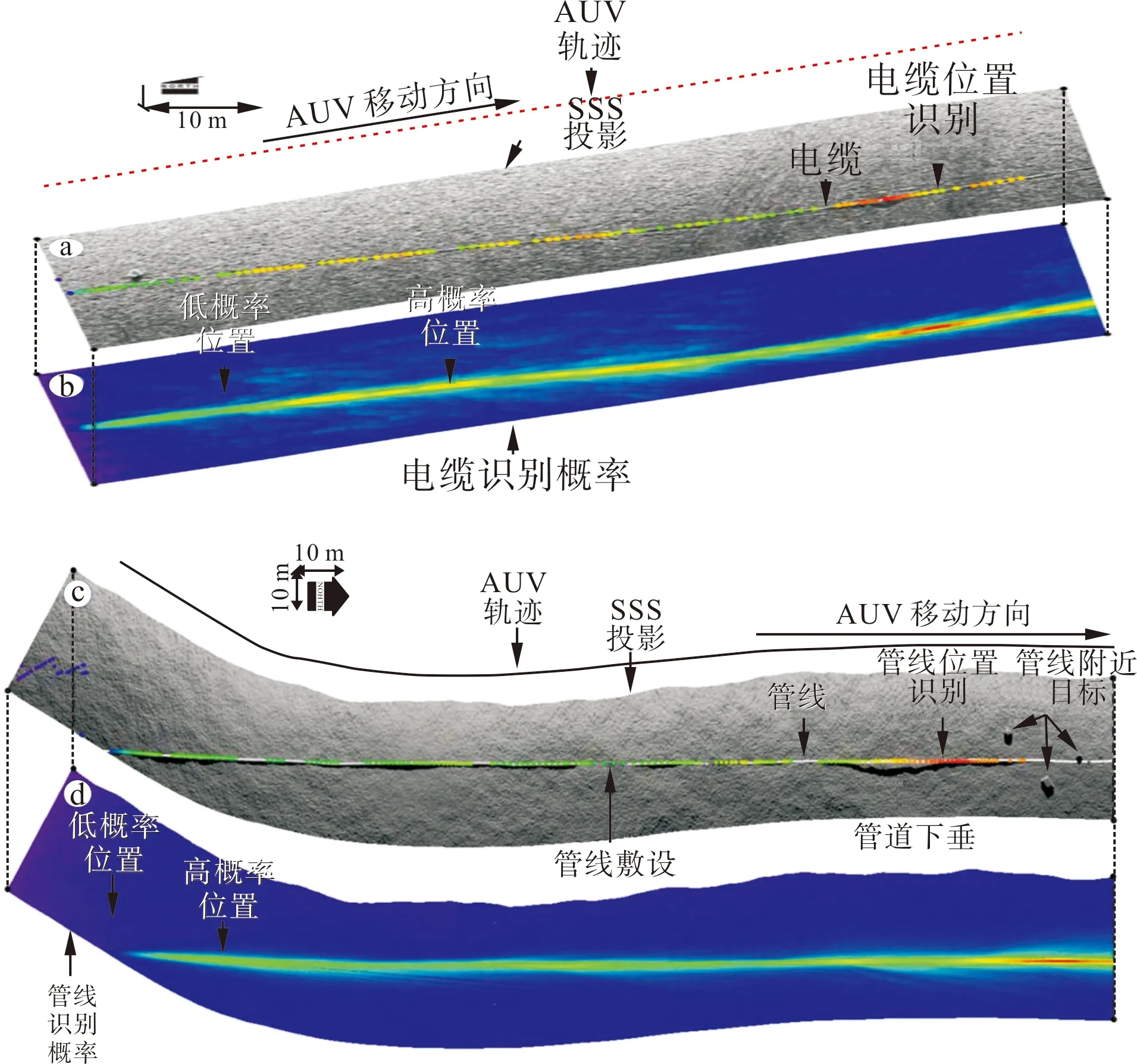
图7 海缆识别及跟踪建模结果[57]Fig.7 Cable recognition processing and tracking modeling results
2.4 磁学检测
磁学检测是目前应用广泛、切实有效的检测技术之一,分为无源检测和有源检测2种,其中无源检测又可细分为绝对磁场法和金属探测法。
2.4.1 绝对磁场法
绝对磁场法指用相应的技术测量海缆铠装层对地磁场的影响(磁异常),与已知的磁场分布规律对比后可对海缆进行定位,并根据记录的一系列海缆位置信息点,连接起来即可得到海缆的路径,主要使用设备有共振磁力仪、磁通门磁力仪以及磁梯度仪(张量仪)3种,其中共振磁力仪包括质子磁力仪和光泵磁力仪,是目前海洋磁检测常用设备。表5为常用于海缆检测的7款磁力仪产品及其性能对比。
磁力仪检测在实际应用中存在以下几个问题。
1)不能对海缆位置及走向进行连续探测,无法真实反映海缆存在的拐弯、曲折甚至盘绕等现象[45]。
2)易受强磁噪声干扰,如航标、船舶停泊区等地方的强磁信号,海浪磁噪声。因此,文献[49]提出采用Sage-Husa自适应Kalman算法来海浪磁场噪声,结果显示海浪磁噪声在1 Hz时的功率谱密度由50 pT/Hz1/2下降到6 pT/Hz1/2。
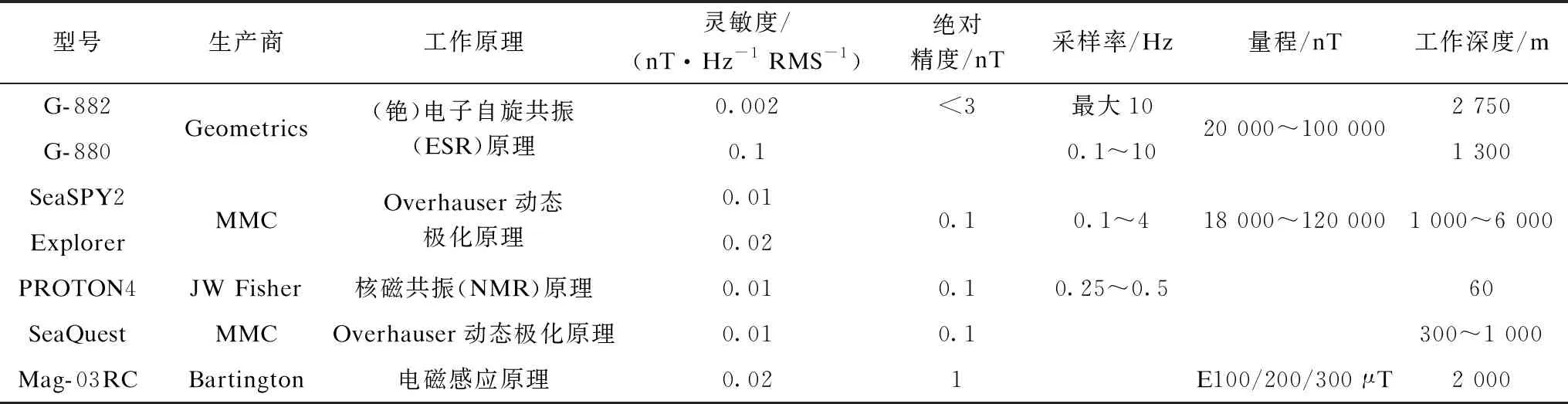
表5 7款磁力仪的性能参数对比Tab.5 Comparison of performance parameters of seven magnetometers
3)易受载体的驱动推进器、舵的电动机以及传感器的噪声干扰,文献[21]指出在测量水下机器人和海缆之间的水平偏移时,传感器噪声会产生尖峰信号,导致导航和控制输入的抖动。文献[22,50]基于2台三轴磁力仪,建立了艏向偏移、水平偏移和埋深的解析公式,并在磁视距(LOS)制导中引入一种具有抗噪能力的水平偏移量估计方法,降低了磁噪声在运动层的负效应,并结合反馈控制器实现了AUV对具有洋流和传感器噪声干扰下的海缆定位与跟踪仿真。
4)目前还没有能够较好地对海缆埋深进行反演的方法。
此外,磁力仪检测需要考虑的误差来源还有实时测量误差(GPS、磁力仪系统产生的测量误差)和非实时测量误差(测量过程中的误差、“拖鱼”定位误差、正常场校正误差、固有的地磁日变改正、船磁改正、“拖鱼”位置归算误差以及数据处理产生的误差等)[51]。
2.4.2 金属探测法
金属探测法也称为脉冲感应法,使用前提是海缆包含加强钢丝和铠装层等金属材料,通过探测金属材料对外源电磁场的影响而实现对海缆的检测[52],无须给海缆加载额外电流。TSS公司的TSS- 440系统及其改进型TSS- 660/660E管线仪采用金属探测法对海缆进行检测,该设备采用了3个线圈和1个高度计对目标进行定位,通过软件背景补偿、海水影响补偿和手动补偿消除外界因素的影响;ELSEC公司的Type5000金属探测器,采用电磁感应的原理检测低阻体,可用于潜水员手持对浅水区域大异常体的快捷检测。这几款设备的构成和算法均很先进,测量无需外接输入跟踪信号,但检测效果受检测目标的响应能力(即目标物体积)和周围的磁性物质影响较大[10]。
2.4.3 有源检测法
有源检测法也称为交流磁场检测法,需在海缆金属层上加载一定频率的交流电,通过特定的探测器在适当的距离内接收海缆周围的电磁波信号并进行处理分析。但由于各种噪声源的干扰以及电磁信号的衰减,探测器必须保持接近目标。近年来,在国外已有了基于有源检测法的较为成熟的商用产品,如TSS公司的TSS- 350管线仪、Innovative Inc公司的以Smartrak及其升级版SmartSearch为代表的水下机器人、Optimal Ranging公司的Orion水下管线调查系统等。TSS- 350管线仪可探测出载体相对于海缆的精确位置,分析出海缆位置、埋深等。但单个TSS- 350管线仪检测距离和范围有限,而且使用成本较高。Orion水下管线调查系统可以测量载体距离管线的水平偏移、垂直深度、电流强度以及偏航角,还会根据水下导体共线引发磁场的变形情况,反映同路多条紧密布置管线的信息。Smartrak搭载磁梯度仪和多轴线磁传感器,可以测量管线及其周围地貌的“无源磁场”磁性强度和直流、交流磁场,而且可连续探测和记录,探测水深达300 m,覆土层厚度达8 m。但该套设备引进成本较高,无法进行管线防腐层缺陷检测。在国内,海缆检测系统依然处于研究阶段,文献[4,53]基于磁信号引导遥控水下机器人跟踪海缆路由的方案提出了5自由度海缆检测AUV,为海缆检测工程实践提供参考方法。
2.5 多传感器融合
多种传感器融合主要是结合多种传感器的优势,融合多传感器的数据信息,对海缆进行形成全面的评估,提高了数据处理的可靠性和准确性,其难点在于信息融合。信息融合包括观测级融合、特征级融合和决策级融合[54]。观测级融合将相关信息与每个传感器的基本信号处理相结合,如声源波束形成和定位技术。特征级融合是在传感器提取到信号强度和方向等相关特征后,对相关信息进行融合。文献[55]通过对海缆探测过程中的信息分类和信息关联,设计了具有多层分布式海缆反馈功能的检测融合结构。决策级融合根据问题的需要,充分利用特征级融合得到的特征信息,为指挥提供参考,如文献[20]基于多波束声呐、摄像头、磁传感器提供的海缆位置数据分别建立特征图,并融合为一个映射,提高检测的置信度和性能的同时,结合AUV控制算法实现对海缆的跟踪检测,如图8所示。

多传感器融合在实际工程中应用也越来越多,2018年中国南方电网有限责任公司结合海南联网工程的实际情况,用ROV携带摄像头、声呐系统、TSS- 350、多普勒流速剖面仪近距离检测海缆路由、埋深、抛石石坝外观、海缆裸露悬空及风险点、海缆路由区域障碍物和地形地貌、海流等[56 - 57],可分析海缆埋深、路由等状况变化的原因。2019年伍兹霍尔海洋研究所利用REMUS 600 AUV同时搭载侧扫声呐、浅地层剖面仪、自补偿磁力计对位于Martha’s Vineyard 和 Falmouth, Massachusetts之间的海缆扫描定位,通过对图像数据的叠加对海缆实现了精准定位[58]。
3 存在问题及发展趋势
近年来,国内外海缆检测方法得到了快速发展。随着我国海洋强国战略的不断推进,海洋工程对海缆技术的需求进一步增强。本文对海缆检测技术存在的问题和发展趋势进行了较系统地整理和归纳。
1)多传感器融合、多检测手段组合,构建全方位海缆检测系统。
图9总结了4种检测技术常用的检测手段及能够获取到的海缆信息,可以看出单种检测技术能够获取到的海缆信息是有限的。

图9 检测技术常用的检测手段及检测内容Fig.9 Common detection methods and contents of detection technology
不同的海缆检测手段具有不同的优势和局限性。在实际应用中,应结合检测目的及要求、工作条件、海洋环境条件、工期要求等多方面因素,合理选择搭配检测方法。为了获取足够的海缆信息,保证海缆故障检测及定位的准确性、高效性,评估海缆运行环境的安全与否,采用多种检测检测技术和手段成为越来越多海缆检测工程的合理选择。海缆检测中,结合声学、磁学以及视觉检测构建综合的海缆检测平台,是适应浑浊、含沙量大、具有电磁干扰的海域情况,获取海缆周围环境的详细信息,对海缆运行状况评估和预防外力破坏的有效手段;磁学检测和剖面声呐结合可以消除海底面起伏变换、海缆挖沟回填不完全等对埋设深度探测的影响。
文献[59]指出我国海底电缆管道管理存在安全隐患问题突出、信息共享机制不畅等主要问题,并提出建立海底电缆管道动态监管体系、实现海底电缆管道普查等建议。通过水下机器人搭载、海洋“拖鱼”、潜水员下潜、海岸监测站4种检测手段的整合,有望构建全方位立体式海缆检测系统,实现海缆的动态监测和普查,完善海缆系统化检测、管理、规划和信息共享机制,如图10所示。具体来讲,海岸监测站作为长期实时监控手段;水下机器人和海洋“拖鱼”作为定期检测手段,其中海洋“拖鱼”、AUV用于长距离快速巡检,ROV用于目标段进行的精细检测,潜水员下潜作为浅水域突发故障的精确排查与维修。
2)提高模型及数据处理能力,提高海缆检测技术的精度与识别率。
第2.3节表3总结了光、电、声、磁学4种检测技术的不足与关键问题,其主要问题可以归纳为如何减小海水中噪声的干扰,提高海缆或海缆的检测精度和识别率。

图10 海缆全方位检测系统框架Fig.10 Framework of sea cable omni-directional inspection system
海洋环境是多变、复杂的,除了采用多传感器融合检测外,更重要的是提高检测模型和算法的处理能力。如对于视觉检测和声学检测而言,受光线和水温等不可避免的因素影响,往往无法获得海缆的高清图像,要提高海缆检测和定位的精度、准确率、召回率,必须从图像处理算法着手。而对于视觉图像和声学图像中的海缆检测和定位可以转化为目标检测的问题。随着机器学习和深度学习的不断发展,各种目标检测算法不断涌现,如Faster RCNN、YOLOv4、SSD等。在使用深度学习目标检测算法完成海缆识别和定位后,可采用传统的海缆检测算法(如霍夫变换)对检测框内的海缆进行直线检测,不仅能减少杂乱背景对海缆识别的影响,还能提高直线检测的精度,减小拟合偏差和运行时间。
深度学习具有较好的模型泛化能力,能够适应不同的场景,而且具有良好的识别和分类性能,可应用于水下图像的海缆识别、电学检测信号的故障分类、磁学检测中海缆的深度反演以及海缆形态的判别、多传感器检测模型训练和权重分配等,但使用前提是需要足够多的数据量进行训练、验证。目前,完整的海缆图像或数字数据集是十分匮乏的,数据集建立的成本也是十分高昂的,这是深度学习在海缆检测应用受到限制的一个重要因素。
3)注重载体的控制精度,提升海缆检测手段的适应性和稳定性。
海缆检测的误差来源除了检测设备的系统误差外,载体(“拖鱼”,水下机器人等)的运动稳定性对检测设备造成的测量误差也占有很大的比重,如“拖鱼”的深度变化、测船航速变化、水下机器人的定位和跟踪误差等。因此,需要提高“拖鱼”、水下机器人等载体的控制精度,重点在于载体位姿的获取和控制,为检测设备提供稳定可靠的动态环境。
航行速度、航向角、海流和牵引力,是影响“拖鱼”入水深度和平面定位的主要影响因素。因此,可通过在“拖鱼”垂直和水平方向上添加额外的动力装置,结合“拖鱼”上的姿态传感器的反馈进行水平、垂直位置和航向角的调整,再使用船载式ADCP实时测流辅助“拖鱼”定位,此外还可通过改进牵引装置,根据测船速度和“拖鱼”入水深度自适应调节拖缆收放和拖曳拉力,增强对拖鱼的控制精度和定位精度。以水下机器人为载体的海缆检测系统是目前研究热点之一,是实现海缆自主巡检、故障类型自主识别、故障定位及路由获取的首要选择。目前已有的海缆检测机器人一般为几吨的重型ROV,需要大型水面船只和起重机支持布放和回收,不利于应对海缆的各种突发故障。因此,体积小、质量轻、便于运输是未来的水下机器人和检测设备趋势。而对于海缆检测AUV和USV而言,还处于研究阶段,除了在定位、轨迹跟踪和运动控制等方面的研究外,还有在海缆不可见或误检测情况下的导航问题。还应针对不同海域的海缆考虑水文洋流数据等,确定水下机器人的抗流能力,确定水下机器人功率、推力以及速度等,提高水下机器人的控制精度。
4)加强国际交流,促进国内合作共享,推进国内海缆检测系统的研发与应用。
虽然近几年国内海缆检测系统有所发展,但与国际先进水平还有一定差距。目前国内用于海缆检测的高精度声呐和海洋磁力仪基本依赖国外引进,尤其是合成孔径声呐和海洋磁梯度仪。对于高效的海缆综合检测系统(如TSS管线仪和Orion系统),国内更是处于空白阶段,亟待开发。因此需要进一步加强与国外高校与研究所的交流与合作,通过国际论坛和会议实现海缆检测技术各部分的技术突破和数据共享,如科学使用海底电缆国际工作组和国际水下技术学会(SUT)会议等。
此外,海缆系统在维护我国海洋领土安全方面具有重要地位,为了打破国外技术壁垒,开发拥有自主产权技术先进的海缆检测系统迫在眉睫。需要企业、高校、研究所等国内研究机构开展交流,信息资源共享,从基础理论研究、制造测试到生产应用等多方面进行合作,并建立海缆检测的图像等数据信息库,突破各种海缆检测技术关键问题,促进我国先进海缆检测系统的研发与应用。
4 结语
随着国家经济的发展以及海洋强国战略的提出,海岛经济发展、海洋能源开发、海洋国土防御等海洋工程都成为国家重点发展对象。作为海洋工程中信息与能源传输的关键角色,海缆系统主要依靠海缆的实时检测与及时维修来保证安全稳定的运行。海缆检测的目标是快速、准确、稳定,海缆检测系统不仅能够快速准确地获得目标海缆的相关信息,还能长时间稳定地运行。
目前,海缆检测手段主要采用人工检测(包括潜水员下潜、人工瞭望)、海洋“拖鱼”以及水下机器人集成等形式,人工参与度均较高,对海洋复杂环境的适应性不高;海缆检测技术主要基于声、光、电、磁学等原理,但均有一定的使用局限性,如光学检测受海底能见度的限制,声学检测受深度和含沙量的限制,磁学检测受检测距离限制等。
本文在总结海缆检测手段与检测技术的关键技术与研究现状的基础上,进一步提出了目前海缆检测整体存在的问题以及发展趋势,期望能给后续海缆检测领域提供一定的参考。
猜你喜欢
船电技术(2024年2期)2024-03-15 12:17:04
电气技术与经济(2023年9期)2023-12-06 14:23:30
中学生数理化·七年级数学人教版(2021年6期)2021-11-22 07:50:58
中学生数理化·七年级数学人教版(2021年6期)2021-11-22 07:50:58
中学生数理化·七年级数学人教版(2021年6期)2021-11-22 07:50:58
中国新技术新产品(2020年24期)2020-02-23 09:12:28
电线电缆(2018年1期)2018-03-16 02:19:10
海峡科技与产业(2016年3期)2016-05-17 04:32:12
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
