
基于道路照明灯罩机械臂式末端清洗系统研究
2021-07-12 00:47:44钱亚伟
现代机械 2021年3期
钱亚伟
(长安大学工程机械学院,陕西 西安 710064)
0 引言
随着路灯数量的快速增加,由于汽车尾气和雾霾天气等影响,大量路灯灯罩被污染物附着,影响照明效果。目前,对路灯灯罩的清洗作业主要依托高空作业平台载人进行清洗,效率低下且存在安全隐患[1]。在路灯灯罩清洁系统研究中,宋淑敏[2]提出了一种基于旋转式LED路灯清洗装置,通过举升托盘至接近路灯时,下拉拉环使托盘套在灯罩上进行清洗,并通过万向轮移动微调。该装置稳定性差,清洗效率低。Akifumi Shintaku[3]开发了使用空化喷射技术的高速隧道照明设备清洁车,并使用先进的驾驶员辅助系统提高安全性,但不能广泛适用于路灯清洗作业。本文设计了一种安装在高空举升平台上的机械臂式路灯灯罩末端清洗系统,可实现自动化清洗,并提高清洁效率。
1 末端清洗系统模型建立
1.1 结构设计
本文设计的搭载于高空举升平台上的机械臂式灯罩末端清洗装置如图1所示,末端清洗装置主要由刷盘、电机、电机支座、四杆变幅机构、连杆、阀控液压缸和转台等组成。机械臂式末端清洗装置共有三自由度,转台回转,连杆变幅和四杆变幅机构角度调节。
以图1中路灯末端清洗机构为研究对象,通过机器人运动学方法分析臂架运动关系,采用改进D-H参数法求解,并建立路灯灯罩末端清洗装置D-H坐标系如图2。
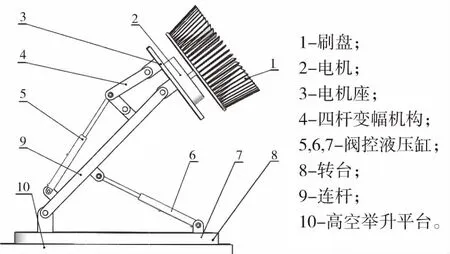
图1 灯罩末端清洗机构三维结构图
在灯罩末端清洗机构参数中各变幅机构旋转角度θi为变量,根据图2建立机械臂连杆参数表如表1。
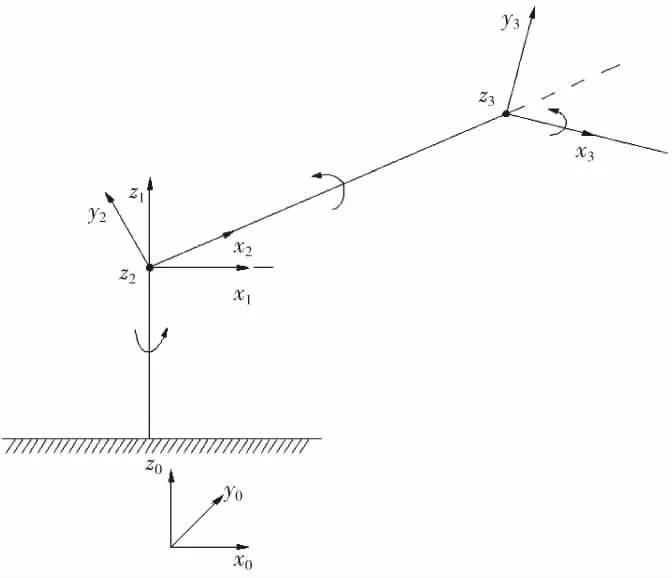
图2 灯罩末端清洗机构D-H坐标系
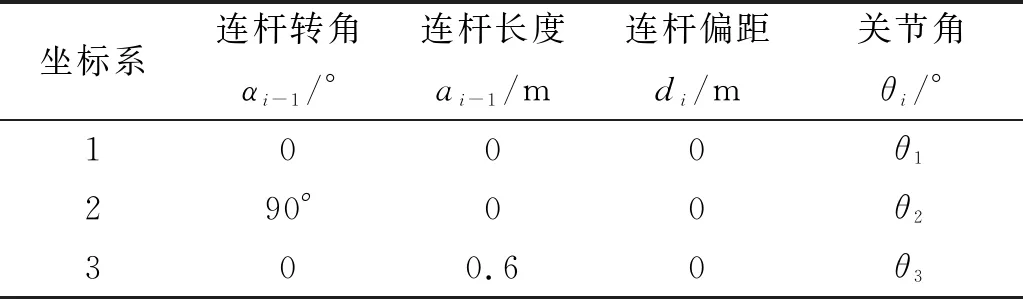
表1 灯罩末端清洗机构连杆参数表
参数表定义如下:
3)纹理共享。纹理数据占模型存储空间的绝大部分,并且也很大程度影响场景的显示性能。在数字城市海量模型中,大量使用了重复的纹理数据,纹理共享避免了反复加载相同纹理的数据,减少了内存使用量,并提升了渲染压力。
首先,父母应重视家庭教育对个体健康人格培养的作用。家庭环境的质量通常被认为是决定青少年行为的重要因素。弗洛伊德特别强调,一个人的性格是由幼年的经验所决定的,精神分析学派认为家庭教育对人格的影响是潜移默化的,许多学生的问题,主要来自于他所身处的原生家庭,更确切地说,是家庭的问题引发了学生的心理或行为障碍。
αi—绕Xi轴,从Zi旋转到Zi+1的角度,即连杆转角;
pz=a2sθ2
θi—绕Zi轴,从Xi-1旋转到Xi的角度,即关节角。
1.2 工作原理
清洗装置的转台安装在高空作业车举升平台支座上,当举升平台举升至灯罩下方时,停止举升并固定。转台内的液压缸调节角度使刷盘在灯罩正下方;铰接在转台上的液压缸控制连杆变幅和刷盘与灯罩间接触压力,并通过铰接在连杆上的液压缸控制四杆变幅机构进行刷盘的姿态调节。路灯灯罩的位置参数已通过传感器测得作为主控制器输入,通过正逆运动学求解转台、连杆以及四杆机构的变幅角度,并通过电液比例阀控制液压缸伸缩进行角度调节和接触压力控制,盘刷角度和接触压力由倾角和压力传感器检测作为反馈信号。当刷盘和灯罩对准且清洗压力达到要求后,启动电机进行清洗作业。连杆和四杆变幅机构变幅角度为0~45°。灯罩清洗流程图如图3。
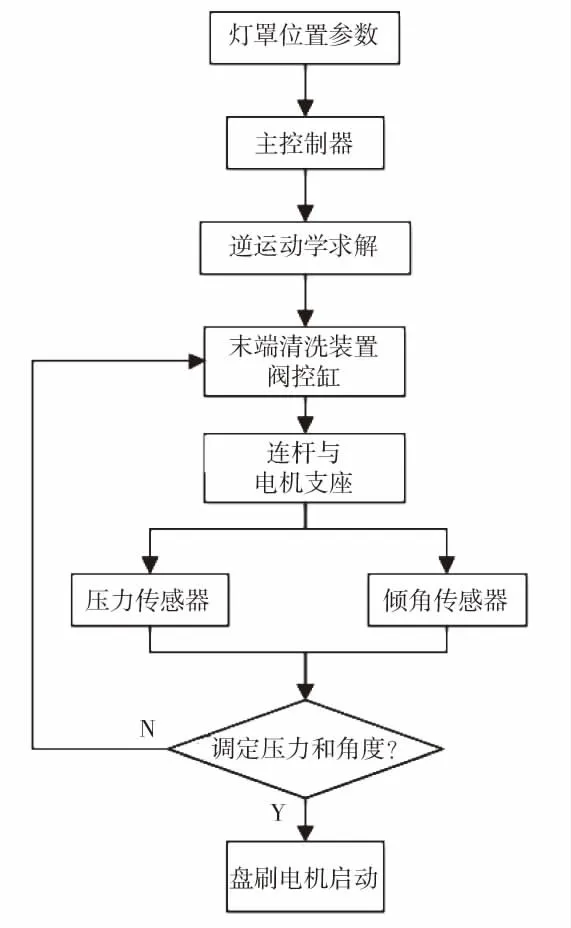
图3 灯罩清洗流程图
2 机械臂式清洗系统运动学分析
根据建立的机械臂式清洗系统D-H坐标系和连杆参数表,对各转动关节进行正逆运动学求解。
2.1 正运动学求解
对机械臂式末端清洗机构刷盘位姿的求解即机械臂的运动学正解。由表1灯罩末端清洗机构连杆参数表,通过计算得到相邻坐标系间变换公式[4]。
施工图是市政建设施工的关键,包含的内容比较多,比如施工质量、施工成本投入、工程量、施工进度等,市政工程施工方案制定要采取公开招标形式,然后在所有的图纸中进行筛选,选出几个较为满意的图纸,召开施工图审核大会,邀请专家、工程师、图纸设计者参与,在大会上设计人员要进行技术交底,相关人员讨论施工图的可行性,同时还要综合考虑施工进度、施工技术难度、施工成本等,然后选择性价比最高的设计图纸。另外,为了确保施工图万无一失,要将图纸交给专业机构进行审核,确保图纸中没有任何错误,避免实际施工中频繁出现图纸更改,从而引发市政建设质量问题。
机械臂运动学变换矩阵为:
(5)
电液比例换向阀传递函数:
r11=cθ1(cθ2cθ3-sθ2sθ3)
r12=-cθ1(cθ2sθ3+sθ2cθ3)
r13=sθ1
r21=sθ1(cθ2cθ3-sθ2sθ3)
随着物联网技术的推广以及智能电网概念的兴起,国内外都在智能用电建设方面开展了大量的理论研究与实际探索,并逐渐对智能电网概念在用电侧体现出的特征内涵和典型建设内容形成了共识;同时,国务院“三网融合”的开展对于促进信息和文化产业发展,提高国民经济和社会信息化水平,满足人民群众日益多样的生产、生活服务需求,拉动国内消费,形成新的经济增长点,因此智能小区的建设具有重要意义。
随着中国经济与社会的高速发展,用电客户对供电可靠性的要求不断提高,大规模开展10 kV配电网不停电作业已成为供电公司实现客户“用好电、不停电”目标不可或缺的手段之一。配电网不停电作业主要采用绝缘杆作业法、绝缘手套作业法两种方式[1]。
r22=-sθ1(cθ2sθ3+sθ2sθ3)
工程管理效益的提高不仅在工程规范施工方面,同时对工程的合理化分配也起到一定的辅助作用,从而达到控制工程施工成本目的。现代工程建设对于建筑施工功能性要求较高,施工项目种类繁复,对施工流程的控制极为重要,是解决工程施工材料及资源浪费问题的重要根据。BIM技术应用能够根据现有的施工条件对相关的施工内容进行准确判断,并合理的规划施工流程,以工程成本节约为基础,选用时间最短、效率更高及质量更好的施工管理方案,从而在多个方面对工程施工的质量与成本问题进行解决。
r23=-cθ1
r31=sθ2cθ3+cθ2sθ3
r32=-sθ2sθ3+cθ2cθ3
r33=0
采用全收粪法。试验选用60只成年公鸡,随机分成5组,每个处理组6个重复,每个重复2只鸡。其中一组为内源组,其他4组分别为正对照组、负对照组、复合酶A组、复合酶B组。用试验饲粮预饲3 d,然后连续收集4 d粪样。粪样收集后按每100 g鲜样加10%硫酸5 ml、滴加5滴甲苯防腐,混匀并置于-20℃冰柜中保存,用于干物质代谢率、能量代谢率和粗蛋白质代谢率测定。
二是在资金绩效评价环节,制定了《赣州市财政专项扶贫资金绩效考评办法》,围绕资金规范管理、脱贫成效等方面,对统筹整合资金使用绩效进行评价监督。2017年,赣州委托第三方机构对8个扶贫开发重点县的统筹整合财政涉农扶贫资金实施了绩效评价,并将评价结果作为市财政分配扶贫专项资金的重要依据。
联立公式(5)、(6),令两边对应矩阵元素相等,计算求得各转动关节角度θi:
py=a2sθ1cθ2
di—沿Zi轴,从Xi-1移动到Xi的距离,即连杆偏距;
2.2 逆运动学求解
(6)
px=a2cθ1cθ2
θ2=arcsin2(pz,a2)
老师在家长群中拥有更多的权力,所以老师一发言,总有家长附和,甚至有一些所谓的“戏精”家长会在群里卖力地表演。在微信群的场域之中,时刻展开着身份、地位和话语权的博弈与角逐,与现实生活的场景相似。所不同的是,微信群里并没有一套明晰、严格的秩序与规则,所以不确定因素以及显得不那么靠谱的事儿也更多。
θ1=arctan2(py,px)

ai—沿Xi轴,从Zi移动到Zi+1的距离,即连杆长度;
3 电液控制系统仿真分析
当机械臂按计算角度变幅后,刷盘与路灯灯罩接触,接触压力由铰接在转台上的液压缸产生,并通过电机支座上的压力传感器反馈到控制器与设定接触压力进行比较并作为反馈信号对系统输入进行控制。
由于对任意i=1,2,...,10,j=1,2,3,4,y=1,有因此,令c=c+1,进一步计算与SD(DEy(0)D(0))(y=1,2,...,10)。经过288次迭代后,计算结果表9所示。
3.1 仿真模型
电液比例控制系统主要有放大器、电液比例换向阀、液压缸、四杆变幅机构以及压力和倾角传感器等组成。
其中,
(7)
式中,Ksc—比例阀流量增益;ωs—比例阀固有频率;ξs—比例阀阻尼比。
阀控缸活塞对阀芯位移的传递函数[5]:
(8)
式中,Kq—流量增益;Ap—负载流量等效面积;ωh—液压固有频率;ξh—液压阻尼比。
系统的开环传递函数为:
学生在实验时配置6种质量分数的杀虫剂溶液:1.25%、2.5%、5%、10%、20%、40%。学生在实验时配置4种质量分数的洗涤剂溶液:2.5%、5%、10%、20%。
(9)
式中,K—开环增益,K=KaKfKscKq/Ap。
对机械臂式路灯灯罩末端清洗机构建立MATLAB/Simulink仿真模型,如图4所示。仿真模型对应参数取表2中数据。
传统的节日和节俗历史悠久,源远流长,集中体现了中华传统文化的核心价值,生动展示了中国人丰富多彩的精神世界,是民族特色和民族个性的具体反映。 同时,它们与民众生活密切相连,深具活力和影响力,是活态的传统文化表现形式,并在世代传承中起到加强血缘和社会纽带、促进团结与文化认同的作用。 它们记录着中华民族数千年的历史,凝聚了民众的生活和情感,以全民参与的方式传承文化血脉、提振民族精神、强化历史记忆,具有深刻的意义和深远的影响。 绚丽多彩的节日,是我国人民代代传承的珍贵文化,也是世界文明的瑰宝。 它们照亮了五千年的历史,也照耀着未来的天空。
表2 系统参数
图4 灯罩末端清洗系统仿真模型
3.2 仿真结果分析
建立灯罩末端清洗系统仿真模型后,采用PID控制器对Simulink仿真模型进行分析[6]。转台液压缸7将机械臂架调整到与灯罩同一平面内,液压缸6控制连杆举升和接触压力控制,液压缸5控制四杆变幅机构完成刷盘姿态调节。液压缸6控制接触压力,为提高末端清洗系统的动态品质,对比不同增益下系统性能,单位阶跃响应下,仿真结果如图5所示。在单位阶跃信号输入下,通过调整控制转台、连杆和四杆变幅机构的阀控缸PID控制器的Kp、Ki、Kd参数,对末端清洗系统整体动态特性进行分析,仿真结果如图6所示。
图5 液压缸6不同增益下单位阶跃响应
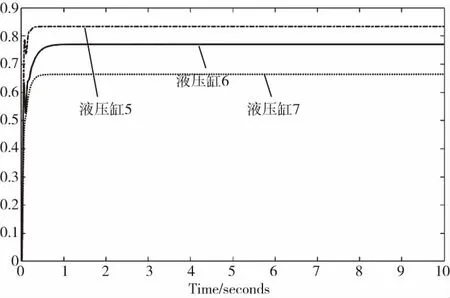
图6 PID控制下单位阶跃响应
仿真结果表明,在单位阶跃信号下,液压缸6取不同增益值,K值越大,稳定性越差,振荡越明显,为提高系统稳定性和动态响应性能,K值取相对较小值,K=29时,液压缸6使刷盘对灯罩表面的接触压力响应速度较快。采用PID控制算法,系统中3个液压缸在0~1 s时恢复稳定,超调量小,保证液压缸稳定完成连杆变幅,验证了姿态调节和刷盘对灯罩压力控制的合理性。
4 结论
1)本文设计一种路灯灯罩末端机械臂式清洗机构,并通过运动学正逆求解,计算转台、连杆以及四杆机构变幅角度,并验证姿态调节与压力控制的合理性。
2)采用3个阀控液压缸和连杆机构进行机械臂式清洗装置姿态调节与压力控制,并建立MATLAB/Simulink仿真模型。采用PID控制算法,抑制超调量,提高了姿态调节与接触压力控制的响应速度和稳定性。
猜你喜欢
参花(下)(2022年1期)2022-01-15 00:45:01
农业装备与车辆工程(2021年10期)2021-11-03 08:38:12
建筑机械(2020年3期)2020-03-01 05:10:38
建筑机械(2020年7期)2020-02-22 10:40:26
制造技术与机床(2019年11期)2019-12-04 05:50:48
北京航空航天大学学报(2019年8期)2019-09-10 00:51:40
模具制造(2019年4期)2019-06-24 03:36:46
小读者(2019年24期)2019-01-10 23:00:37
河南工学院学报(2017年1期)2017-06-07 09:00:59
三联生活周刊(2016年50期)2016-12-15 17:40:36
