FCM-CV水平集算法在沉底小目标声呐图像分割中的应用
2021-07-12 01:29韩婷婷王璐瑶张丽红李海森
水下无人系统学报 2021年3期
韩婷婷, 王璐瑶, 周 天, 徐 超, 张丽红, 李海森
FCM-CV水平集算法在沉底小目标声呐图像分割中的应用
韩婷婷, 王璐瑶, 周 天, 徐 超, 张丽红, 李海森
(1. 哈尔滨工程大学 水声技术重点试验室, 黑龙江 哈尔滨, 150001; 2. 工业和信息化部 海洋信息获取与安全工信部重点实验室(哈尔滨工程大学), 黑龙江 哈尔滨, 150001; 3. 哈尔滨工程大学 水声工程学院, 黑龙江 哈尔滨, 150001)
针对沉底小目标高频声呐图像信混比低, 难以与背景分离的问题, 提出模糊聚类(FCM)算法与Chan-Vese(CV)水平集算法相结合的分割方法。该方法利用FCM算法得到的隶属度函数自动设定水平集模型曲线的初始演化位置, 解决了CV水平集分割因初始位置设置不当而无法得到准确分割结果的不足; 同时根据模糊聚类的结果, 对水平集演化的控制参数进行估计, 使得分割过程更加稳健。通过仿真数据及外场试验数据处理可知, 相较于FCM和马尔科夫随机场分割算法, 文中算法对斑点噪声不敏感, 可分割出完整的边界; 相较于常规CV水平集算法, 文中算法因粗分割后零水平集的设定更接近目标的边缘, 可以在较少迭代次数下即可获得更加精确的分割结果。
沉底小目标; 模糊聚类算法; CV水平集分割; 声呐图像; 马尔科夫随机场分割
0 引言
沉底小目标声呐图像一般由目标高亮区、阴影区和海底混响区三部分构成, 其背景复杂、噪声污染严重。沉底小目标声呐图像分割就是将目标的高亮区和阴影区提取出来, 并尽量保留原始边缘信息, 降低后续处理过程中的计算量。保证特征提取的准确度, 是声呐图像识别过程中的关键步骤[1]。由于沉底目标信混比低且存在阴影, 沉底小目标的分割至今仍是一个难题, 寻求高质量的声呐图像分割方法一直是学者们研究的重点[2]。
近年来, 根据目标图像的区域及边缘信息进行分割的主动轮廓模型在计算机视觉领域得到成功的应用, 该方法也越来越多地应用于声呐图像分割领域[3]。主动轮廓分割主要包括Snake分割和水平集分割, 前者在物理模型内部能量(内力)和外部能量(外力)作用下使曲线向边缘轮廓运动完成分割, 后者在曲线演化过程中利用轮廓几何特征通过求解偏微分方程使曲线收敛至目标边缘, 完成分割[3]。
相较而言, 水平集分割充分考虑了各相之间的相互独立性和Snake模型的拓扑性, 通过求解最小能量泛函, 使演化曲线不断向目标区域边缘轮廓的位置移动, 解决了Snake分割中极易陷入局部最小的问题, 并使该算法具有一定的抗噪能力[4]。MumFord等[5]提出MS(Mumford-Shah)水平集分割, 将分割的目标区域当作是光滑的; Chan等[6]对MS模型进一步简化, 提出CV(Chan-Vese)水平集分割算法; Li等[7]在最小能量函数计算时加入惩罚项, 解决了在水平集分割过程中不断进行函数初始化的缺陷。但该方法对初始位置的设置比较敏感, 设置不当则无法获得准确的分割结果。而沉底小目标受高频主动声呐探测位置、角度的影响, 目标形态呈现出一定的差异, 无法手动设置或固化初始演化曲线。文中在文献[6]的基础上, 提出模糊聚类(fuzzy c-means, FCM)-CV水平集分割方法, 即利用FCM算法进行预分割, 并将该分割结果作为CV水平集分割的初始演化曲线, 解决了零水平集初始位置对CV模型的影响, 提高了声呐图像分割的速度和准确性。
1 沉底小目标图像分割算法
1.1 FCM算法原理



1.2 CV模型

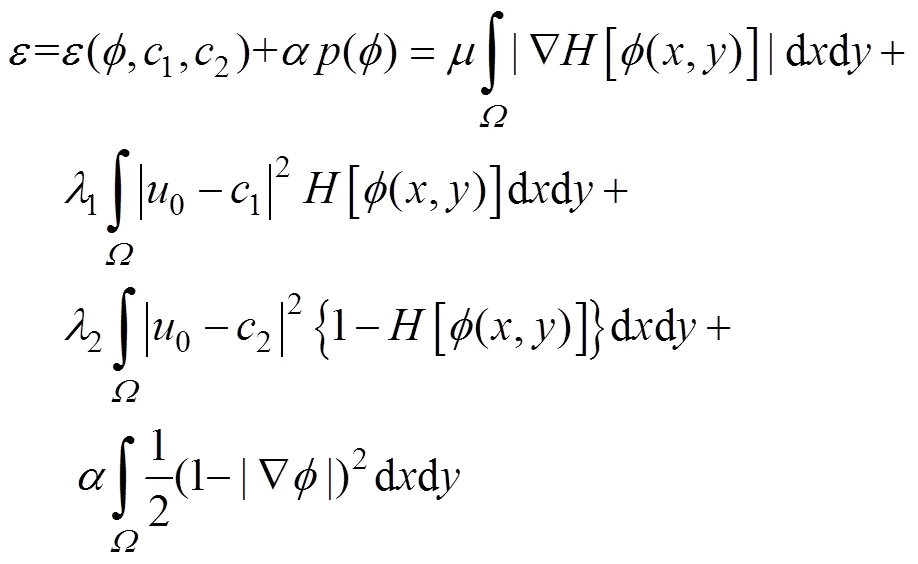
CV模型能量泛函为
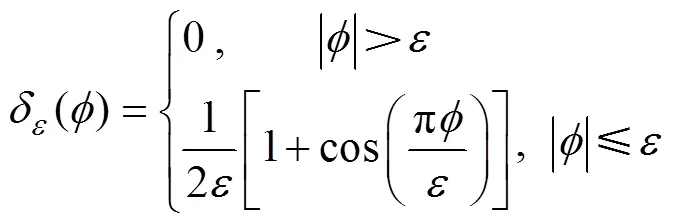
定义Heaviside和Dirac函数为

将式(6)带入式(4), 得到参数化的能量泛函

其中





综合式(4)和式(11)得到最终的能量泛函
根据拉格朗日原理, 上式可通过求解梯度函数来实现, 即

利用差分代替微分,上式的离散化形式为



2 FCM-CV水平集算法模型
加入距离约束项的CV水平集对初始位置敏感, 设置不当则无法得到准确的分割结果。而沉底小目标受声呐位置角度的影响, 目标形态呈现出一定的差异, 无法手动设置或固化初始演化曲线。因而, 文中利用FCM算法协作CV水平集分割, 通过将FCM结果用于初始化水平集函数和自动化参数配置, 加速并优化水平集分割。
模糊水平集演化递推公式





下面利用聚类结果对水平集演化的控制参数进行估计:

这种初始化在许多实际应用中是可取的, 尤其在这种有初步分割步骤的情况下, 它可以简单有效地生成, 计算效率高。式(15)则一般用于手动初始化, 对于同一初始化分割, 二者仅在边界梯度处略有差别, 但趋势是一致的。
利用FCM改进的CV水平集分割算法步骤如下:


4) 判断零水平集曲线是否达到稳定或达到迭代上线, 若达到则停止循环过程, 输出结果, 反之,返回步骤3)。
综上, 以FCM为指导的正则化水平集演化策略可总结为: 首先, 将FCM作为一种自适应阈值选取, 促使零水平集进行少量的迭代便可从初始边界移动到目标边界; 其次, 水平集分割的控制参数可以直接从FCM的结果中导出; 最后, 气球力的定义可以更加灵活地控制轮廓的收缩和扩张, 以达到理想的分割效果。算法流程参见图1。

图1 算法流程图
3 仿真与试验数据处理
为了验证结合FCM-CV水平集分割的有效性, 利用高频成像声呐在外场水库试验数据(如图2所示)及仿真数据(如图3所示)中的目标作为待分割图像, 设图2中的目标1为目标A, 图3中的目标1和目标4分别为目标B和目标C。
图2为高频成像声呐原始数据图, 声呐的工作频率为450 kHz, 波束宽度为0.4°。声呐位置
固定, 信号为CW脉冲, 脉冲宽度为1 ms, 发射周期为1 s, 采样频率为72 kHz。在水库中放置2个长2 m, 直径0.5 m的圆柱体作为目标, 其中目标1为检测到的水中目标, 目标2为沉底目标, 二者大小、形状和材质均相同, 只是位置不同, 故下文以目标1为例进行处理分析。
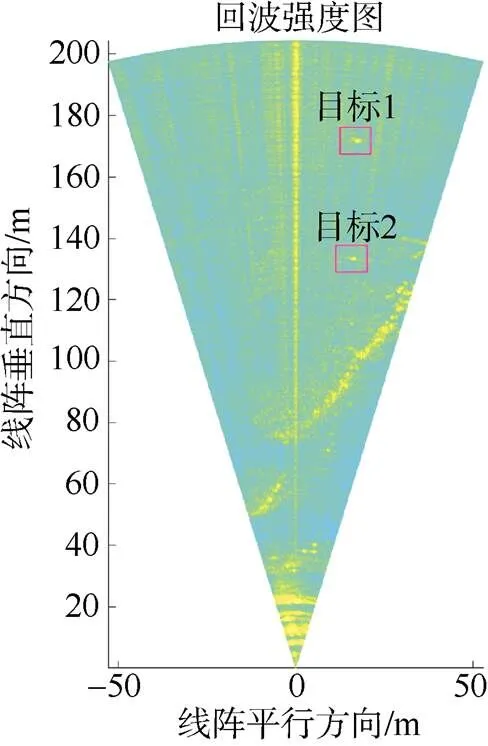
图2 外场水库试验数据图
图3为文中仿真的4个悬浮和沉底的目标, 目标1为直立状, 其余3个水平或成一定角度平躺于底部, 目标2与目标4后有明显的阴影区。一般而言, 影长为目标长度的3~5倍。

图3 仿真数据三维图
3.1 基于FCM-CV水平集算法的数据处理

图4和图5中横轴均为波束方向, 纵轴均为距离方向。图4(a)为文中利用FCM算法进行预分割的结果, 红色曲线即为零水平集曲线; 图4(b)为在图4(a)的初始化条件下, 经14次迭代的CV水平集分割结果图。
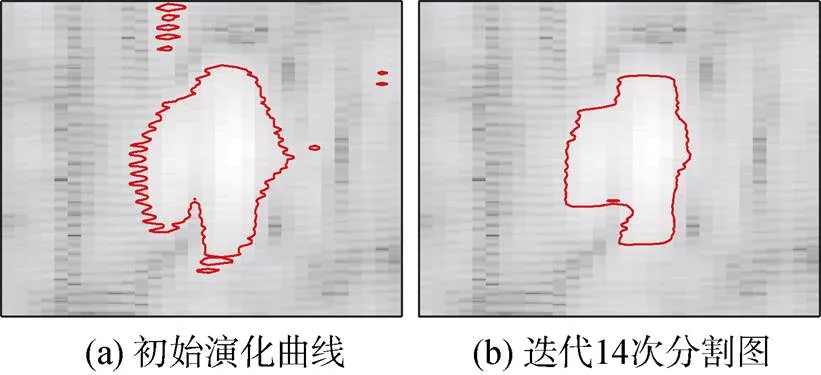
图4 文中算法分割结果
图5(a)为手动圈定的初始演化曲线; 图5(b)~ (d)分别为迭代150, 200和240次分割出的目标轮廓。声呐图像一般都有较强的背景噪声, 目标边界也不明朗, 手动初始化并不能得到最优的水平集分割结果(见图5)。相比之下, 文中提出的方法则将动态曲线快速吸引到了感兴趣的边界(见图4(b))。由于CV水平集分割对初始演化曲线较为敏感, FCM预分割可自动圈定目标轮廓, 再经过适当迭代后即可分割出相对完整且准确的目标边缘, 计算效率优势更加明显。而常规的CV水平集分割因需手动选取曲线的初始演化位置, 既费时费力, 又易导致误分与漏分, 还需要较多的迭代次数。

图5 常规CV水平集分割
3.2 不同分割算法处理结果对比与分析
为了更好地说明文中算法的优越性, 将其与FCM算法[10]、马尔科夫随机场(Markov random field, MRF)分割算法[11]的分割效果进行对比。 MRF算法经常被用于声呐图像分割, 主要基于像素点的空间相关性, 即图像中某一点所属类别只与其周围点的类别有关, 具有抗噪性强, 分割效果好, 但计算成本高, 难以实时实现的特点。这里将目标A、B和C作为待分割图像, 分别利用上述3种方法进行分割处理, 如表1所示。表中图示的横轴为波束方向, 纵轴为距离方向。

另外, 表1给出了对应算法的运行时间。显然, 文中算法略慢于FCM模型, 但比MRF模型快得多, 这主要是因为该算法不需要手动圈定目标, 不需要重新初始化, 并且允许使用更大的时间步长, 大大减少了迭代次数和计算时间, 基本可满足设备实时处理的需求。
为对结果进行定量分析, 引入误分率(mis- classification error, ME)[12]作为算法分割准确率的评价标准


表1 试验数据处理
以表1中的手动分割图作为目标的真实轮廓, 由式(23)定量计算得到3个目标各自的, 如表2所示。

表2 不同算法的ME比较
由表中可以看处, 不论是目标A, B或者C, 均有FCM>MRF>文中算法, 即文中算法的分割准确率高于MRF算法和FCM算法。上述分析体现了文中算法在实时性和分割效果上均有优异的表现。
4 结束语
文中基于CV模型提出FCM算法与CV水平集算法相结合的方式进行水下悬浮和沉底目标的分割。利用FCM算法进行粗分割, 将分割结果作为CV水平集分割的初始曲线。通过外场试验数据和仿真数据, 对比FCM算法和MRF算法, 文中算法对斑点噪声不敏感, 对轮廓模糊的目标边界可实现较为完整的分割, 同时解决了CV水平集分割对曲线演化的初始位置十分敏感的问题, 减少了迭代次数, 更加精确地分割出目标的边缘轮廓。该算法在分割水下沉底目标的研究及实际工程应用中具有一定的应用价值。
后续研究拟考虑对水平集分割中模型参数的设置作进一步优化, 以提高算法的稳定性。
[1] 席志红, 赵春梅. 基于变分水平集理论的水下图像分割方法[J].应用科技, 2019, 46(2): 57-62.
Xi Zhi-hong, Zhao Chun-mei. An Underwater Image Segmentation Method based on the Variational Level Set Theory[J]. Applied Science and Technology, 2019, 46(2): 57-62.
[2] 王雷, 叶秀芬, 王天. 模糊聚类的侧扫声纳图像分割算法[J]. 华中科技大学学报(自然科学版), 2012, 40(9): 25- 29.
Wang Lei, Ye Xiu-fen, Wang Tian. Segmentation Algorithm of Fuzzy Clustering on Side Scan Sonar Image[J]. Journal of Huazhong University of Science and Technology Nature Science, 2012, 40(9): 25-29.
[3] 王雷. 侧扫声呐图像分割算法研究[D]. 哈尔滨: 哈尔滨工程大学, 2013.
[4] Huang Y, Huang Y C. Segmenting SAR Satellite ImagesWith the Multilayer Level Set Approach[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2011, 4(3): 632-642.
[5] Mumford D, Shah J. Optimal Approximations by Piecew- ise Smooth Functions and Associated Variational Problems[J]. Communications on Pure & Applied Mathematics, 1989, 42(5): 577-685.
[6] Chan T E, Vese L A. A Level Set Algorithm for Minimizing the Mumford-Shah Functional in Image Processing [C]//IEEE Workshop on Variational & Level Set Me- thods. Vancouver, BC, Canada: IEEE, 2001.
[7] Li C, Xu C, Gui C, et al. Level Set Evolution without Re-initialization: A New Variational Formulation[C]//IEEE Computer Society Conference on Computer Vision & Pattern Recognition. San Diego, CA, USA: IEEE, 2005.
[8] Vikas A, Sreenivasan A, Sudha K L. Fuzzy C-means Clustering and Criminisi Algorithm Based Shadow Removal Scheme for Side Scan Sonar Images[C]//2017 International Conference on Innovative Mechanisms for Industry Applications(ICIMIA). Bangalore: IEEE, 2017: 411- 414.
[9] 王兴梅. 水下声呐图像的MRF目标检测与水平集的轮廓提取方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2010.
[10] 刘璐. 基于类内类间距离的模糊聚类算法及图像分割应用[D]. 西安: 西安邮电大学, 2016.
[11] 叶秀芬, 王兴梅, 方超, 等. 基于改进的马尔可夫随机场声呐图像分割方法研究[J]. 兵工学报, 2009, 30(8): 1039-1045.
Ye Xiu-fen, Wang Xing-mei, Fang Chao, et al. Study of Sonar Imagery Segmentation Algorithm Based on Improved Markov Random Field Model[J]. Acta ArmamentarII, 2009, 30(8): 1039-1045.
[12] Von K T. The Impact of Seaplane Floats during Landing[R]. Washington, USA: National Advisory Committee for Aeronautics, NACA TN 321, 1929: 1-8.
Application of FCM-CV Level Set Algorithm in Sonar Image Segmentation of Small Sinking Target
HAN Ting-ting, WANG Lu-yao, ZHOU Tian, XU Chao, ZHANG Li-hong, LI Hai-sen
(1. Acoustic Science and Technology Laboratory, Harbin Engineering University, Harbin 150001, China; 2. Key Laboratory of Marine Information Acquisition and Security(Harbin Engineering University), Harbin 150001, China; 3. College of Underwater Acoustic Engineering, Harbin Engineering University, Harbin 150001, China)
Aiming at the problem that the signal-to-mix ratio of the small sinking target is low, and it is difficult to separate from the background, this study proposes a segmentation method to use the fuzzy c-means(FCM) algorithm to coo- perate with the Chan-Vese(CV) level set. This method automatically sets the initial evolution position of the level set model curve by using the membership function obtained from the FCM algorithm, which solves the problem that the CV-level set segmentation cannot obtain accurate segmentation results because of the incorrect initial position setting. Simultaneously, the control parameters of the level set evolution are estimated according to the results of fuzzy clustering, which makes the segmentation process more robust. Using outfield test and simulation data, compared with the algorithm of FCM segmentation and Markov random field segmentation, the algorithm in this study is not sensitive to speckle noise and cansegmenta complete boundary. Compared with the conventional CV-level set algorithm, the algorithm in this study can obtain more accurate segmentation results with feweriterations.
small sinking target; fuzzy c-means(FCM) algorithm; Chan-Vese(CV) level set segmentation; sonar image; Markov random field segmentation
TJ630; TN911.7
A
2096-3920(2021)03-0278-08
10.11993/j.issn.2096-3920.2021.03.005
韩婷婷, 王璐瑶, 周天, 等. FCM-CV水平集算法在沉底小目标声呐图像分割中的应用[J]. 水下无人系统学报, 2021, 29(3): 278-285.
(责任编辑: 杨力军)
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
舰船科学技术(2022年11期)2022-07-15
南京理工大学学报(2022年1期)2022-03-17
计算机应用与软件(2021年7期)2021-07-16
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
时代英语·高一(2019年5期)2019-09-03
现代兵器(2016年12期)2016-12-22
现代兵器(2016年12期)2016-12-22
大灰狼(2009年7期)2009-08-26
舒适广告(2008年9期)2008-09-22