
高密度路网区高速公路可变信息标志版面要素组合
2021-07-09 05:18荆迪菲宋灿灿郭忠印高华睿
同济大学学报(自然科学版) 2021年6期
荆迪菲,宋灿灿,郭忠印,高华睿
(1.同济大学道路与交通工程教育部重点实验室,上海201804;2.山东高速建设管理集团有限公司,山东济南250014)
随着交通需求的快速增长与道路工程建设的推进,高速公路已呈现出高密度路网结构。由于高密度路网具备良好的连接性和均质性[1],交通事件及交通流量增长对高速公路造成的影响不仅局限于事发路段,也会传播到周边相关道路从而对区域路网造成影响[2],导致路网整体通行效率下降。在既有交通需求和路网容量下,通过交通诱导方法来规避大面积区域拥堵,实现交通流的合理分布,提高道路利用率,是交通管理者最为青睐的策略[3]。
可变信息标志(variable message signs,VMS)是交通诱导系统中信息发布系统的重要组成部分,通过实时的交通状况信息诱导车辆规划路径[4],达到缓解交通堵塞、减少交通事故、提升路网整体通行效率的目的。随着我国路网密度及复杂程度的提高,文字式VMS或简单的图形式VMS已不能满足出入口密集、可替代路径丰富的高密度路网区的高速公路交通诱导需求。大型图文式VMS以图形形式显示路网内各路段的交通状况,并辅以必要的文字,不仅可使不同出行目的的驾驶员都能受益,而且能够提供整个路网的剩余交通容量等信息,以便驾驶员选择合适的路线[5]。部分学者[6-8]对交通标志版面形式展开研究,结果表明版面要素空间布局对驾驶员判断道路走向及道路关系具有强烈的暗示诱导作用,但未提出交通标志版面要素组合设置规则。大型图文式VMS版面包含多种图形要素、文字要素与色彩要素,如果组合不当,反而增加驾驶员对VMS的认知难度,导致驾驶员对诱导信息执行率和路网通行效率降低。目前关于大型图文式VMS版面的研究多集中于城市道路[9-11],且仅针对如版面文字[12]、版面颜色[13]等的单个版面要素研究,对VMS版面要素组合形式研究在高速公路的应用上处于空白。我国目前尚未提出关于VMS设计的规范,现有的《道路交通标志和标线》(GB 5768—2009)和《高速公路LED可变信息标志》(GB/T 23828—2009)仍旧缺少这方面的具体内容,未制订具体的可执行的条款。
驾驶模拟试验可根据试验需要设计道路场景,对场景设计参数或试验变量进行研究,具有安全、经济、可重复试验等优点。Klee等[14]、Godley等[15]、Kaptein等[16]、Jamson等[17]多位学者针对驾驶模拟试验进行了物理验证和行为验证,认为驾驶模拟试验得出的数据具有绝对有效性或相对有效性,能应用于道路安全设施评价。Zheng等[18]、刘博华等[19]多位学者采用眼动仪对驾驶员注视点、注视时间等眼动行为数据进行分析,研究视觉行为与标志视认的关系,是交通标志研究中常用的方法。因此,采用驾驶模拟与眼动仪对VMS版面要素组合进行研究是可行的。
综上所述,针对高密度路网环境,研究VMS版面要素组合形式对驾驶员的视认行为、车辆运行特性及VMS诱导效果的影响,提出VMS版面要素组合设置方法。
1 VMS版面要素组合设计
从VMS版面必须可视、可读、可知、可信的角度出发,综合国内外VMS设计和高密度路网区高速公路特点,采用拓扑图表示实际路网形状,用平纵相连的光带表示路网的连通性。VMS显示路网范围以所在互通为起点,以所在高速公路行驶方向最近的枢纽互通为终点,路网图形按驾驶员行驶方向观看路网的方式放置,并对当前所处位置进行醒目标识。VMS各版面下方均辅以文字描述路况与出行建议。VMS各版面均采用红、黄、绿3种颜色线条表示各路段实时的交通状况,红色表示拥堵,黄色表示行驶缓慢,绿色表示畅通。VMS版面文字和尺寸设计均满足《道路交通标志和标线》(GB 5768—2009)的规定。
设计了4种不同版面要素组合形式的VMS版面,如表1所示(以京台高速磁窑枢纽互通处为例)。

表1 VMS版面Tab.1 VMS layout
2 试验方案
2.1 试验设备
试验基于同济大学ScaNer Studio驾驶模拟仿真平台,该平台可提供沉浸式模拟驾驶环境,且采集数据种类丰富且数据量大,采集频率设置为50 Hz。驾驶员视认行为数据通过Dikablis眼动仪进行采集,该仪器可采集各项眼部数据,包括视点坐标、注视和扫视等多种实时数据,采集频率为60 Hz。试验现场见图1。
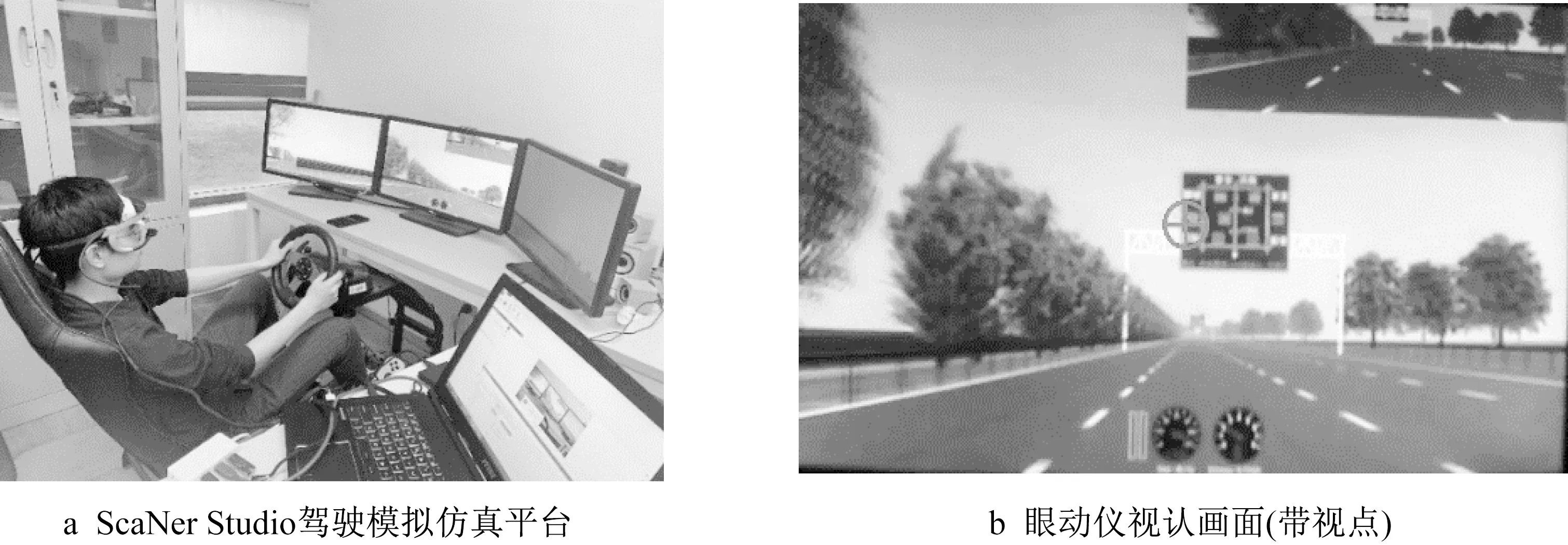
图1 驾驶模拟试验现场Fig.1 Driving simulation experiment
为确保驾驶模拟试验的有效性和数据真实性,要求被试驾驶员评估试验环境、试验场景、速度感知、加速器、方向盘和踏板性能的真实度,真实度满分10分,分数越高表明场景越真实。结果如表2所示,表明该驾驶模拟试验具有很高的真实度,与实际交通场景的差异甚微。

表2 驾驶模拟试验真实度评估结果Tab.2 Reality evaluation results of driving simulation experiment
2.2 试验场景设计
共设置4种场景,分别对应4不同版面要素组合形式的VMS。路线设计速度120 km·h-1,全长16.9 km。为了尽可能减小线形对视认VMS产生的影响,纵断面采用了平坡。圆曲线最小半径810 m,回旋线长度、超高等均满足规范要求。横断面为双向八车道,车道宽度3.75 m,右侧硬路肩宽度3.0 m。
场景共设置3处互通,其中第1处为枢纽互通,其余为一般互通,互通间距均为6 km。VMS均以龙门架形式布设在互通出口前3 km的直线处。场景中的其他标志按照《道路交通标志和标线》设置。除VMS外设置必要的指路标志以辅助驾驶员进行VMS认知试验,并增测普通文字式标志和普通图文式标志作为对照组,如图2所示。

图2 试验对照组标志Fig.2 Signs of experimental control group
为保证驾驶模拟试验结果的有效性,以120 km·h-1时驾驶员的视认距离为评价指标,通过预试验确定标志的放大倍数为1.5倍,驾驶模拟场景中可变信息板效果如图3所示。
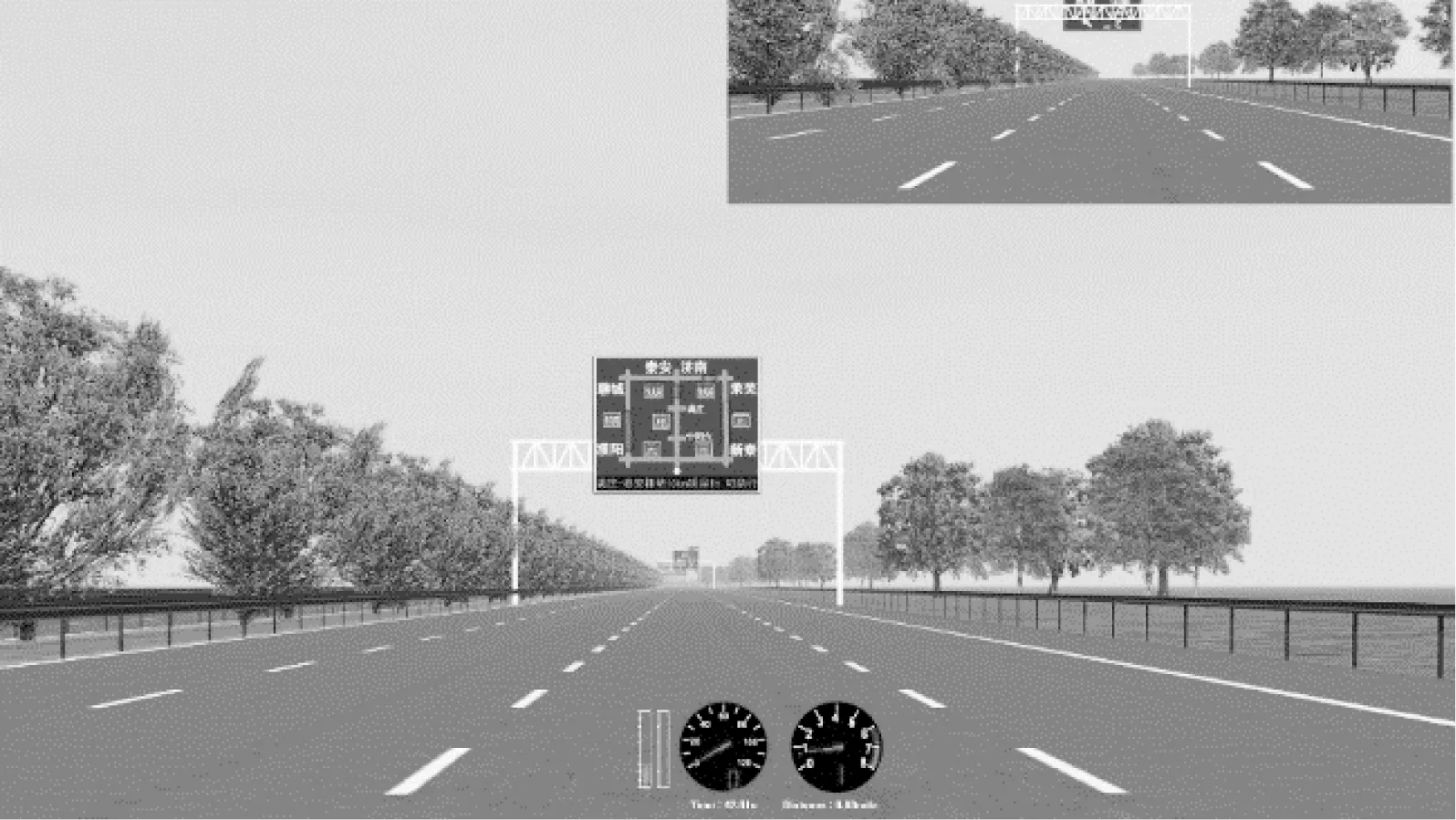
图3 驾驶模拟试验场景中VMS视认效果Fig.3 VMS visual recognition results in driving simulation test scenarios
2.3 被试驾驶员
样本量的合理选取是获得充分试验数据的关键,样本量过小会导致结论可信度的降低,样本量过大会导致资源的浪费。本文采用的样本量计算式如式(1)所示:

式中:n为样本量;z为标准正态分布统计量;σ为标准差;E为最大允许误差。
选取10%的显著性水平来反映样本量的90%的置信水平,即E=10%。此时,z=1.25,σ取值为0.25~0.5[20],由于驾驶模拟试验人数限制,σ=0.3。因此,所需最小样本量为14。
公开招募驾驶员20人,男女比例3:1,性别比例和年龄分布均符合中国驾驶人统计特征[21]。所有受试者的视力或矫正后视力及听力均正常,并全部持有C1驾照,被试驾驶员的平均年龄24.35岁(标准差1.87年),平均驾龄3.25年(标准差1.5年)。
2.4 试验流程
试验模拟的是对路况陌生的驾驶员在VMS诱导下寻找目的地的过程。为避免驾驶员对模拟器操作熟练程度的影响,先让驾驶员在模拟器自带场景中操作模拟器20 min。试验开始前告知被试驾驶员目的地,同时将纸质地图给被试观者看5 min,地图如图4所示,然后为被试驾驶员佩戴并调试眼动仪。正式试验时,VMS1~VMS4场景随机播放,每位被试驾驶员均应遍历4种场景。
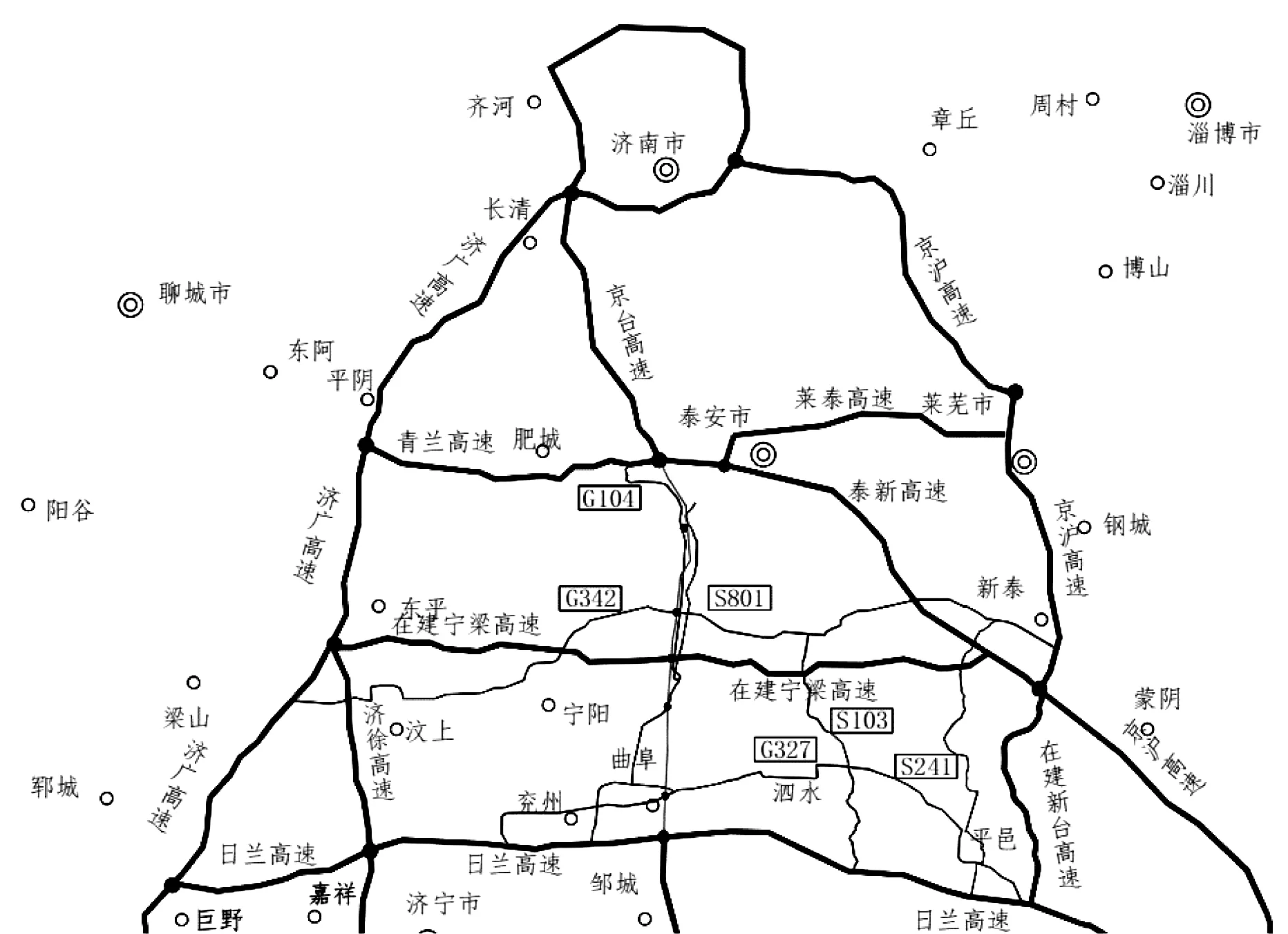
图4 试验地图Fig.4 Test map
试验过程中,被试驾驶员驾驶小型车按限速标志正常驾驶车辆,通过沿途指路标志及VMS展示的路径诱导信息,结合自身理解自由规划路径,驶往试验要求的目的地。行驶至可以看清VMS时打开左转向灯,直至视认VMS完毕或无法看到VMS时关闭左转向灯。当驾驶员驶出高速公路或错过正确出口时试验结束,试验组织者观察并记录被试驾驶员的选择的路径。
3 单个指标选取与分析
通过试验共获得20名驾驶员4种场景的试验数据,经过初步分析,所有驾驶员均完成了VMS的视认,选择驾驶员视认VMS过程即自左转向灯开启至左转向关闭时段内的数据进行分析。
3.1 诱导效果
诱导效果的数据来源于驾驶员对于行驶路径的选择结果与驾驶员自述的感受。交通标志版面是影响驾驶员路径选择行为的重要因素。图5是驾驶员在不同交通标志诱导下做出的路径决策分布图。由图5可知普通标志提供的静态信息对驾驶员路径决策不存在影响,VMS各版面均对驾驶员路径决策存在不同程度的影响。VMS版面1对驾驶员路径决策影响最小,60%的驾驶员仍按原路线行驶,原因是版面未标注中间2个互通出口的名字,在对版面信息不理解的情况下驾驶员更倾向于维持原路线行驶;VMS版面2、版面3对驾驶员的影响大于版面1,仅22%左右的驾驶员不采纳VMS诱导信息,虽标注互通名字但部分驾驶员不知道是否可驶出高速,从而无法做出路径决策;VMS版面4对驾驶员影响最大,95%的驾驶员选择提前驶出高速公路,驾驶员视认到互通处的绿色横线和白色三角,知道“满庄”、“磁窑”是可以驶出的,从而快速重新规划路线。
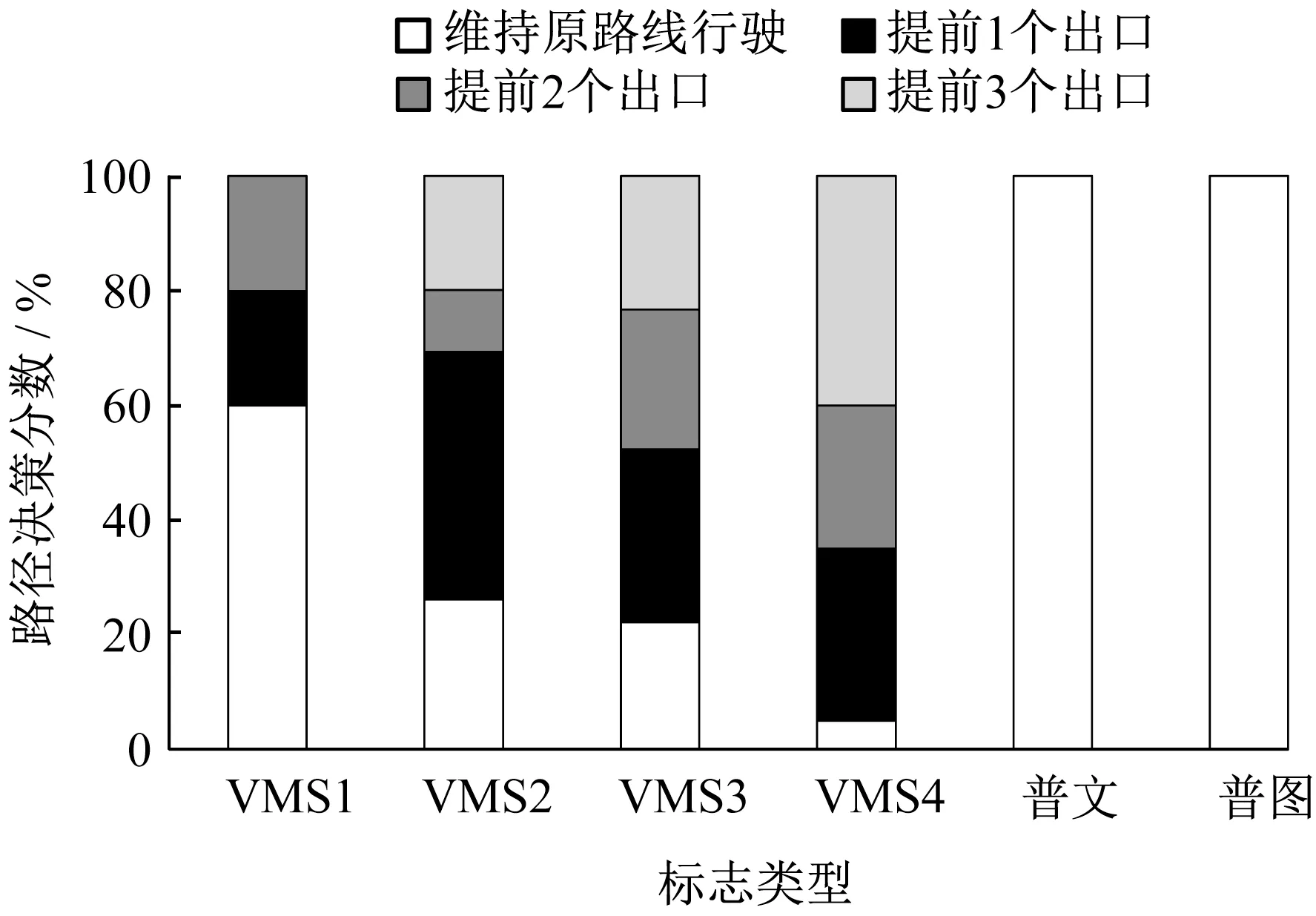
图5 视认不同标志时驾驶员路径决策分布Fig.5 Driver’s route choice under different traffic signs
3.2 驾驶操纵稳定性
驾驶员操纵稳定性、操纵负荷的数据均通过模拟器获得。当交通标志版面使人疑惑、信息量过大时,驾驶员可能会因过度关注交通标志而对车辆的操控水平下降。本文选取平均运行速度-v、横向加速度方差ay指标对驾驶操纵稳定性进行描述。
3.2.1 平均运行速度
运行速度是影响道路安全的重要指标。驾驶员视认各类标志的平均运行速度-v箱形图如图6所示。从-v变化特征来看,VMS版面4与普通文字式、普通图文式标志几乎完全相同,平均运行速度均维持在110 km·h-1;VMS版面2、版面3的离散程度、极值、均值等与普通文字式、普通图文式标志差异不大;VMS版面1的极值和离散程度远大于其他类型标志,表明部分驾驶员在视认VMS版面1时无法维持正常行驶,甚至出现突然减速至60 km·h-1的情况,对高速公路安全造成严重影响。
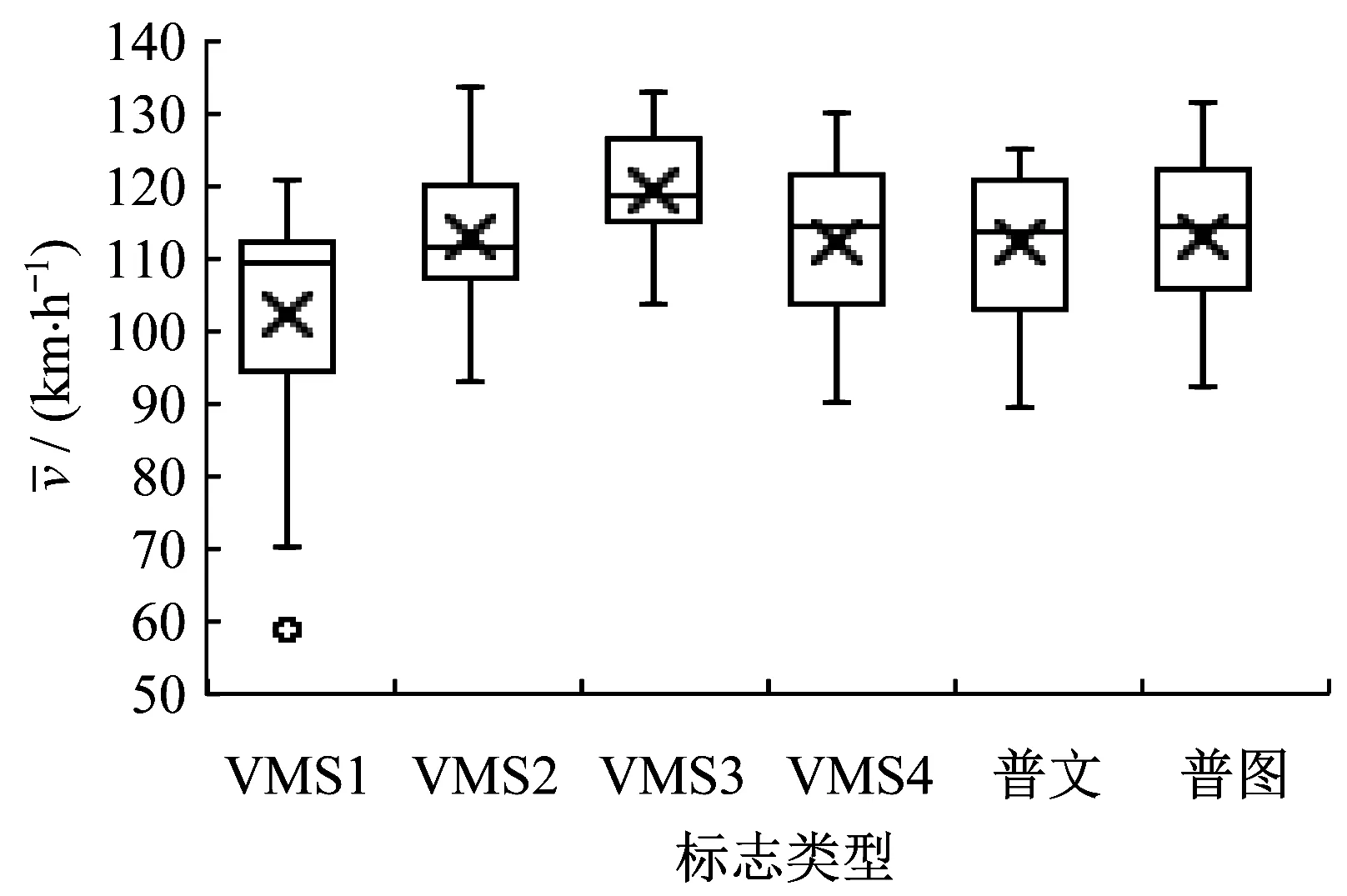
图6 不同标志视认过程中¯v箱形图Fig.6 Boxplot of¯v when recognizing different traffic signs
3.2.2 横向加速度方差
车辆横向加速度方差可以准确反映车辆横向稳定性。方差越大表示驾驶员在视认过程中横向稳定性越差,行车安全性也越低。驾驶员视认各类标志的横向加速度方差ay绘制箱形图如图7所示。
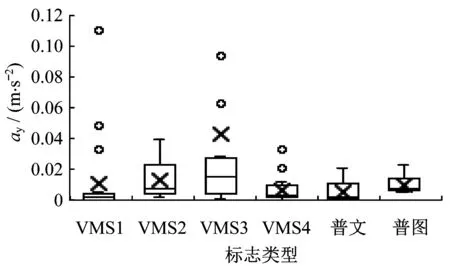
图7 不同标志视认过程中ay箱形图Fig.7 Boxplot of ay when recognizing different traffic signs
由图7可知,VMS版面3的ay均值较大、离散程度大且极值多,表明驾驶员在视认该标志时横向加速度变化剧烈,不利于行车安全;VMS版面1的均值虽与普通文字式、图文式标志相似,但存在多个极值;VMS版面2的ay离散程度大,且均值也大于普通标志;VMS版面4的横向加速方差虽存在少数极值,但极值偏离程度和整体离散程度低,均值与普通标志相同,表明视认VMS版面4时不会对车辆横向稳定性造成显著影响。
3.3 驾驶操纵负荷
驾驶员长时间高负荷工作,容易产生驾驶疲劳,在极端高负荷情况下,可能会导致驾驶员无法跟随公路轨迹,甚至会引发交通事故。VMS信息量过大而难以辨认时,驾驶员可能存在频繁的加减速或转向等操作,进而使驾驶员操纵负荷显著提高,影响车辆行驶安全。
操纵负荷主要来源于方向盘、油门、制动踏板的操作,选取方向盘转角信号的高频分量h、油门踏板开合度ρgas、制动踏板开合度ρbrake指标对操纵负荷进行描述。
3.3.1 方向盘转角信号的高频分量h
采用方向盘转角信号的高频分量h部分表征驾驶员操控方向盘时的操纵负荷,随机选择被试驾驶员样本为例,采用Daubechies 6阶小波对其视认标志过程中的方向盘转角进行逐层分解,分解其中的高频能量部分,对其求自相关函数并进行傅里叶变换得到其功率谱,如图8所示。
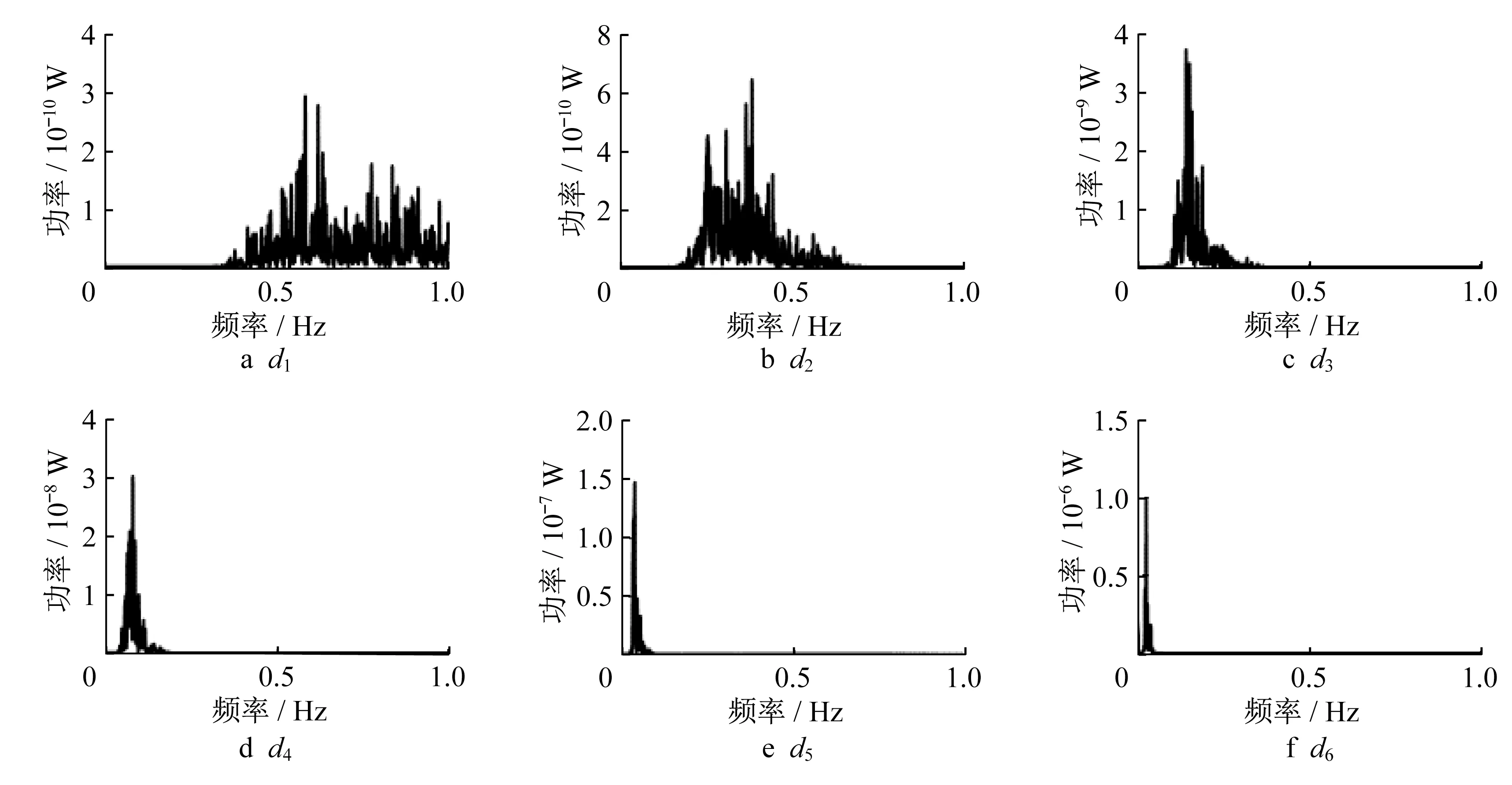
图8 方向盘转角信号的各层小波功率谱Fig.8 Power spectrum of each layer Wavelet of steering wheel angle signal
图8中,d1、d2的功率谱均为近似宽带过程,d3、d4的功率谱含一定的高频成分,d5、d6的功率谱分布相似且以低频为主。因此取前4层小波能量之和作为驾驶员视认过程中的高频指标h,即h=∑i=14di,用以表征驾驶员视认标志过程中的操纵负荷,并绘制箱形图如图9所示。
图9表明,VMS版面4的视认过程中驾驶员的操纵负荷最小,甚至小于普通文字式、普通图文式标志,表明该VMS版面不仅可以帮助驾驶员明确前方路况,还可以帮助驾驶员平稳通过路段;VMS版面1、版面2、版面3都对驾驶员造成了不同程度的过量负荷。
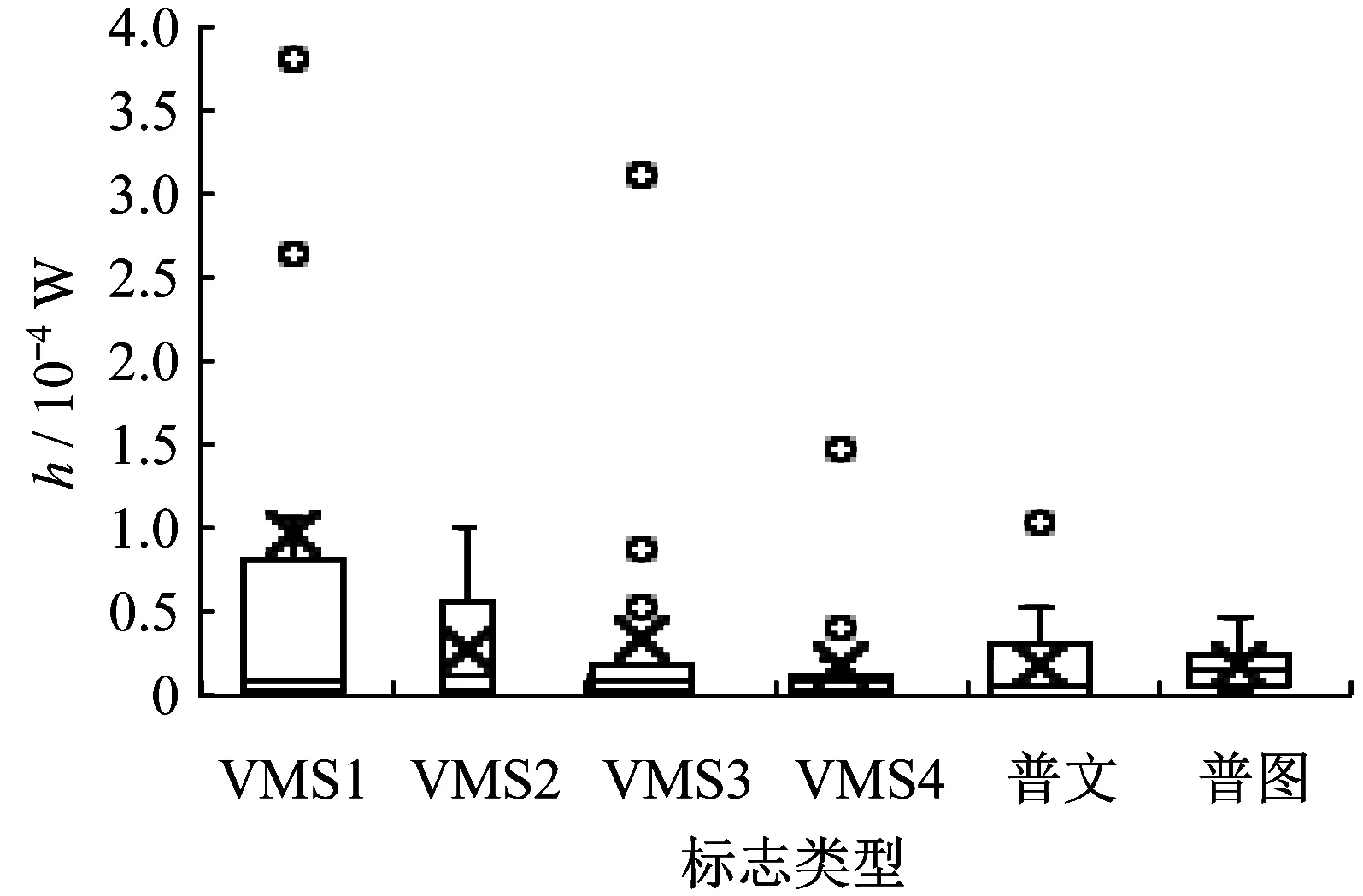
图9 不同标志视认过程中h箱形图Fig.9 Boxplot of h when recognizing different traffic signs
3.3.2 油门、制动踏板开合度
油门、制动踏板开合度(ρgas、ρbrake)为踩踏油门、制动行程占总行程的百分比,变化趋势如图10所示。
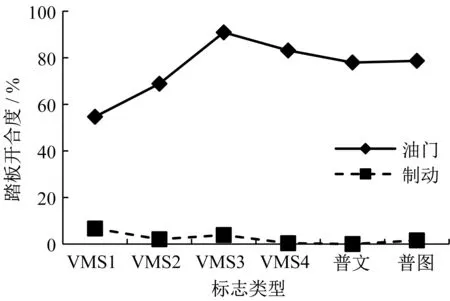
图10 油门、制动踏板开合度图Fig.10 Aperture of gas pedal and brake pedal
由图10可知,VMS版面4的油门、制动踏板开合度与普通文字式、普通图文式标志几乎相同,表明驾驶员在视认VMS版面4时不会影响车辆正常行驶;VMS版面2、版面3的ρgas、ρbrake较高,表明驾驶员频繁对油门、制动踏板进行操作,无法平顺通过视认路段;VMS版面1的ρbrake远高于其他标志,表明部分驾驶员在视认VMS版面1时需制动降速才能进行版面信息的视认,加重驾驶员操纵负荷,扰乱行车稳定性,使其无法维持正常行驶,不利于高速公路行车安全。
3.4 视认行为特性
驾驶员行驶过程中其视觉搜索模式为选择性注意方式,其注意力并不会平均分配在各个注视目标上,而是对最为关注的目标区域反复注视。采用Kmeans聚类方法对驾驶员视认过程中的注视点坐标进行聚类,比较发现当类的数量为3时的聚类效果与实际视认过程相符,聚类结果如表3所示。
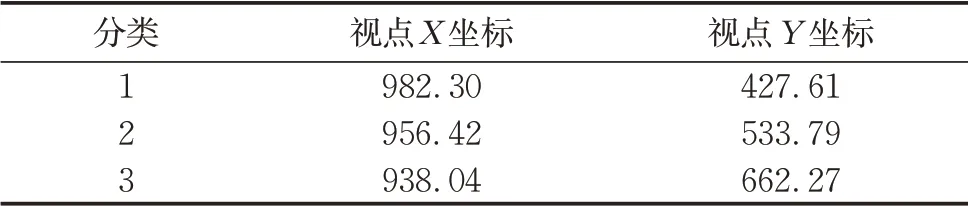
表3 注视区域聚类中心结果Tab.3 Clustering centers of gaze area
基于聚类结果,将驾驶员视点的兴趣区域划分为3类,分别为交通标志、前方道路和车内仪表盘,并以某驾驶员视认VMS版面1和普通文字式标志为例绘制兴趣区域注视时间分布图如图11所示。
由图11a可知,该名驾驶员在视认过程中注视标志的时间高达74%,表明驾驶员注意力多集中在标志上,且对标志进行二次注视。在时间轴6~10 s范围内,驾驶员持续关注标志时间远大于合理认知时间2.5s这一标准。而图11b中,驾驶员关注标志的时间仅占20%,即2s,驾驶员的注意力多半都在前方道路上,偶尔会关注仪表盘。上述分析结果说明,驾驶员对VMS版面1的视认存在一定困难,该标志的设计不合理。
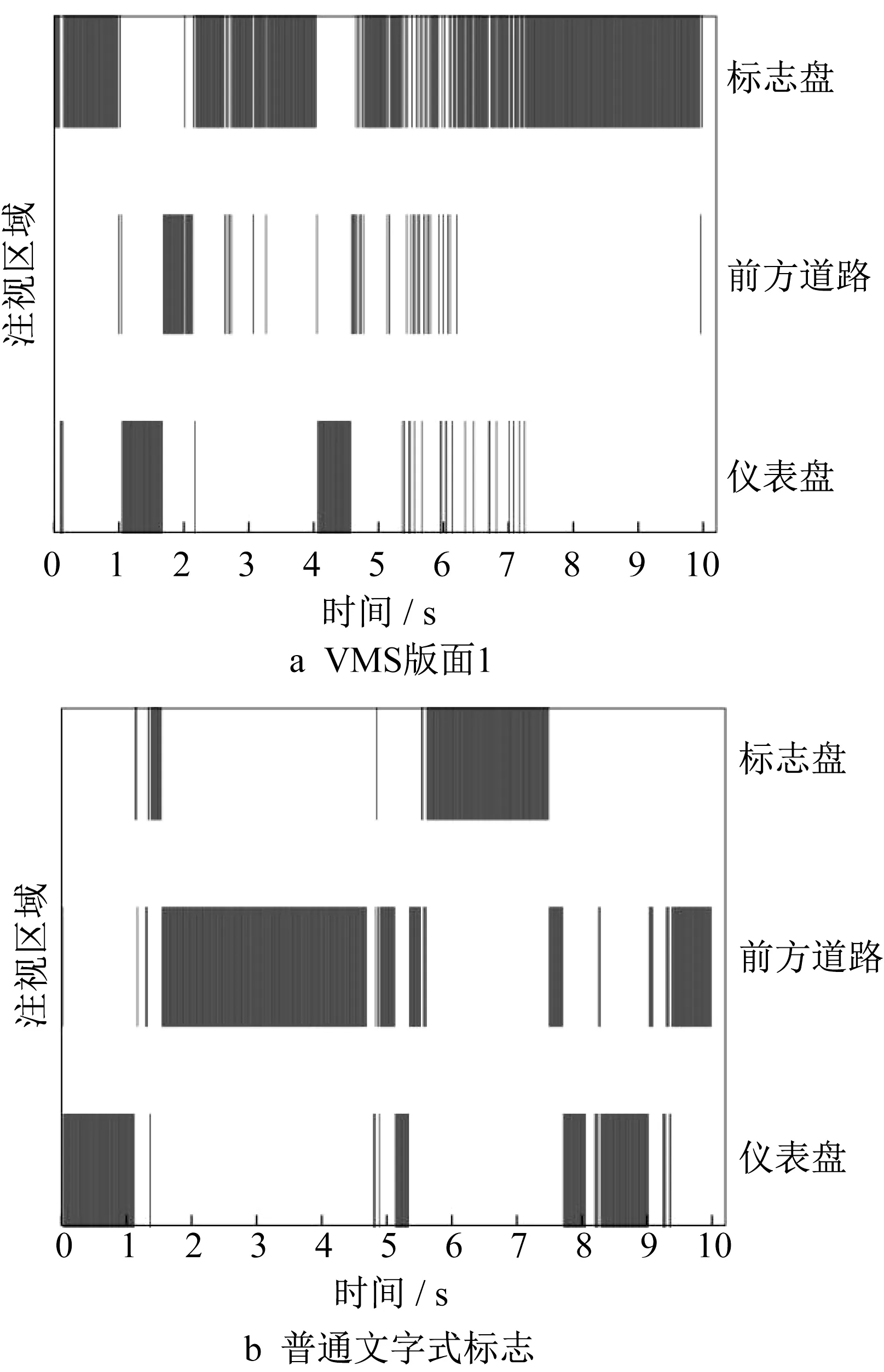
图11 兴趣区域注视时间分布Fig.11 Distribution of gaze time in areas of interest
对比所有驾驶员视认标志的时间比例T(图12),统计分析其视点分布及持续注视时间发现,VMS版面4的视认标志时间比例与普通图文式相似,VMS版面1、版面2、版面3的视认时间远大于VMS版面4及普通标志,表明这3种版面的VMS存在或缺少一些要素使驾驶员无法在有限时间内顺利完成视认。
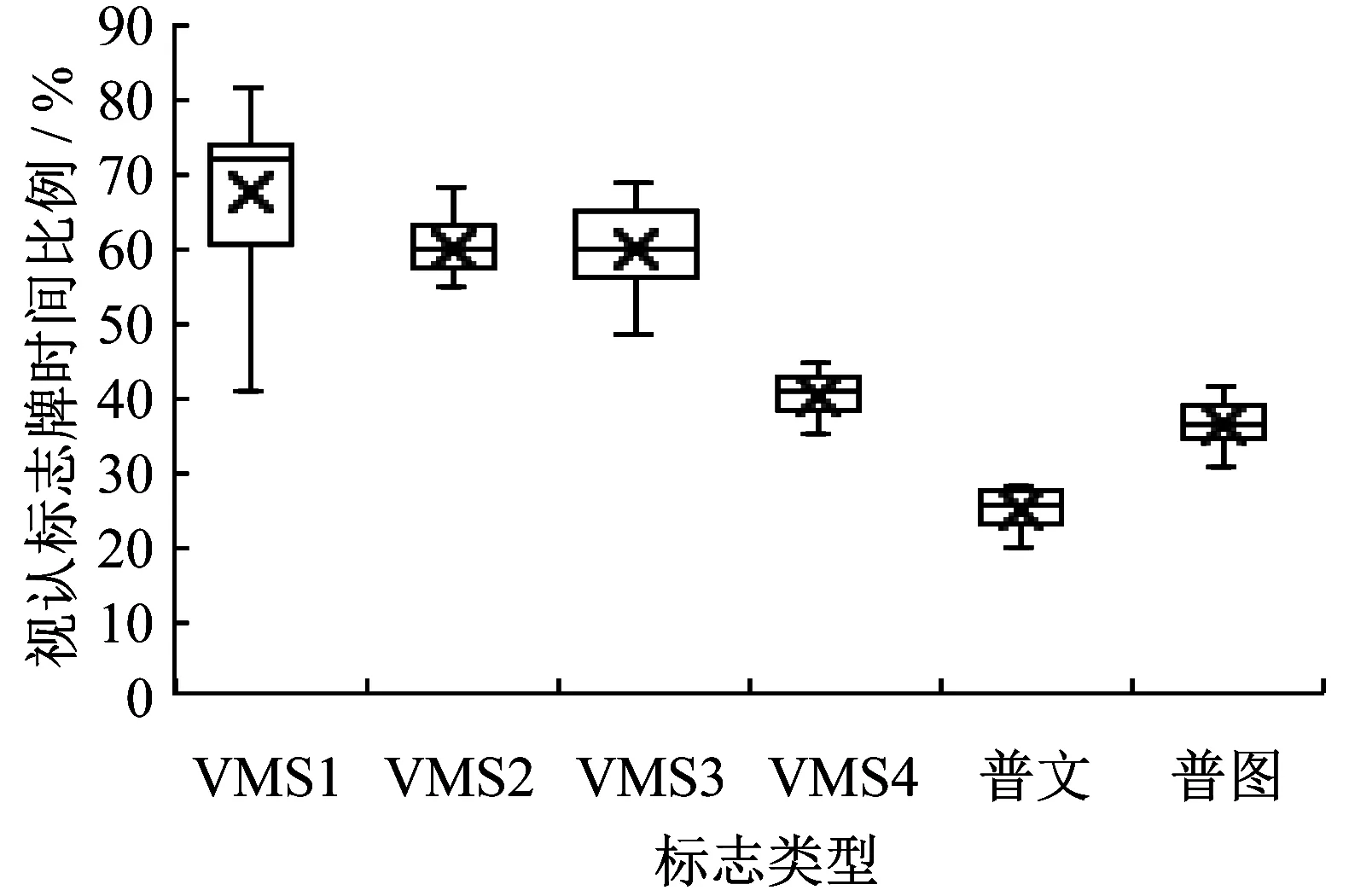
图12 不同标志视认时间比例T箱形图Fig.12 Boxplot of recognition time proportion of different traffic signs
4 指标多维分析
4.1 指标方差分析
为研究不同类型标志对应的各指标的差异性,运用方差分析法,分析不同类型标志对驾驶员驾驶行为特性的影响。首先将各指标作为连续变量,并检验连续变量的正态性、方差齐性和协方差齐性。通过Shapiro-Wilk、Levene’s和协方差齐性检验得出各指标均不满足多元方差分析使用的前提假设,因此采用置换多元方差分析方法,基于Bray-Curtis距离对各指标进行非参数多元方差分析。
置换多元方差分析的组间分析结果如表4所示,显著性p值小于0.05,即不同类型标志的各指标的差异具有统计学意义。
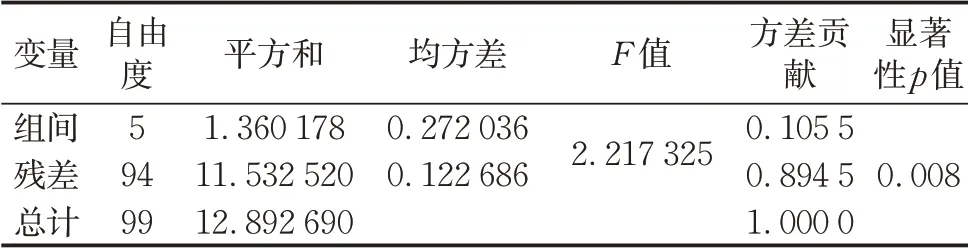
表4 置换多元方差分析的组间分析结果Tab.4 Results of between-group analysis by PERMANOVA
进一步对不同标志类型进行两两比较,结果如表5所示。由显著性p值可知,VMS版面3、版面4与普通文字式、普通图文式标志无显著差异(p>0.05),表明驾驶员在视认VMS版面3、版面4时与普通标志无显著区别,不会影响行车安全性;VMS版面2与普通文字式标志有显著差异(p<0.05),与普通图文式标志无显著差异(p>0.05);VMS版面1与普通文字式、普通图文式标志均有显著差异(p<0.05),表明驾驶员在视认VMS版面1时较为困难。
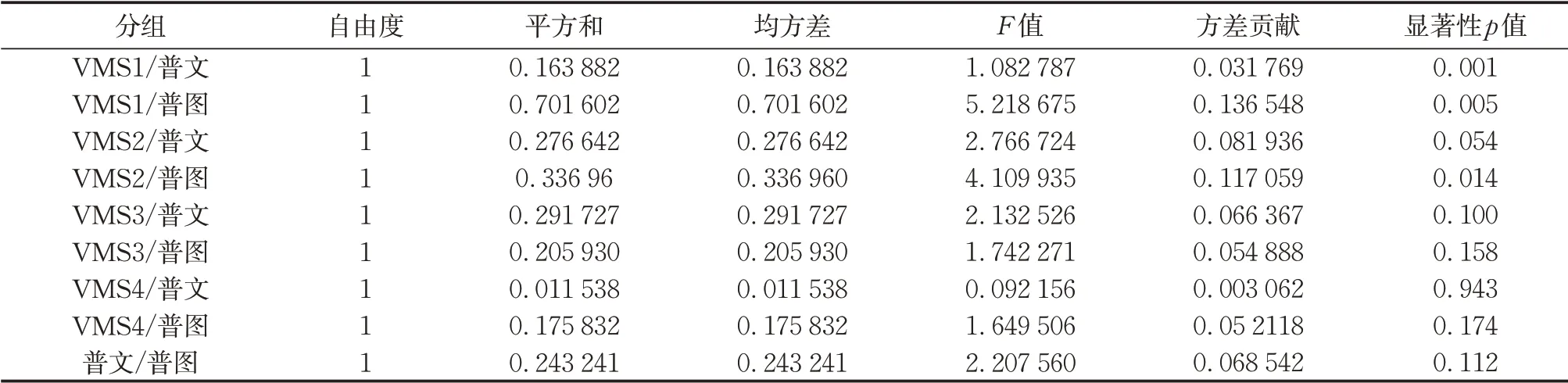
表5 置换多元方差分析的两两比较结果Tab.5 Results of post hoc test by PERMANOVA
4.2 指标因子分析
本文选取的驾驶行为指标均为驾驶员在视认过程中减速、维稳等操作的体现,指标间存在一定相关性。选取横向加速度方差ay、方向盘转角信号的高频分量h、制动踏板开合度ρbrake、不同标志视认时间比例T指标进行因子分析,以期寻求一个能反应驾驶员各种驾驶行为的综合性指标。
首先对各指标进行Kaiser-Meyer-Olkin检验和Bartlett球形度检验,Kaiser-Meyer-Olkin检验统计值为0.767>0.5,Bartlett球形度检验的卡方统计值为412.82(p<0.001),满足因子分析要求。基于主成分分析法提取了3个因子,总方差累积解释率为82.17%,因子特征值及解释率见表6。基于最大方差法旋转,经5次迭代后收敛,得到各变量在3个因子上的荷载矩阵,见表7。通过回归得到因子得分系数矩阵,见表8。

表6 解释的总方差Tab.6 Explained total variance
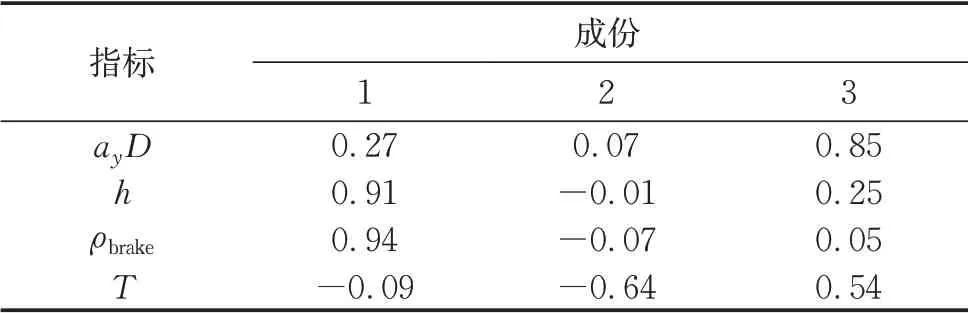
表7 旋转成份矩阵Tab.7 Rotated component matrix
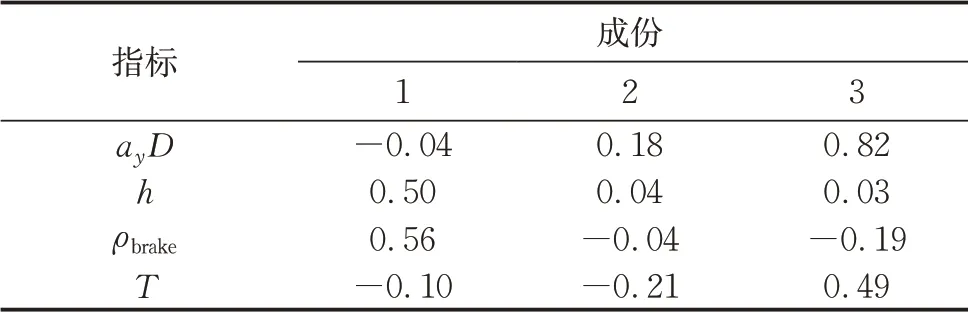
表8 成份得分系数矩阵Tab.8 Coefficient matrix of component scores
由表7可知,因子3与ay有较强关联性,表示操纵稳定性;因子2与h、ρbrake有较强关联性,均表示操纵负荷;因子1与T有较强关联性,表示视认特性。基于方差解释率和因子得分系数计算因子综合得分S如式(2)所示:

S是能综合反映驾驶员视认过程中各项驾驶行为指标共同特征的参数,其值越大表明驾驶员在视认过程中驾驶行为越紊乱,行车安全性越低。计算各样本的S并绘制箱形图如图13所示,普通文字式标志S均值和离散程度均最小,表明视认该种标志时行车安全性极高;VMS版面1、版面2、版面3的S的均值和离散程度较大;VMS版面4和普通文字式标志相似。结合前述指标分析,基于驾驶行为特性的VMS版面排名由优至劣分别为:版面4、版面3与版面2(版面3与版面2接近)、版面1。
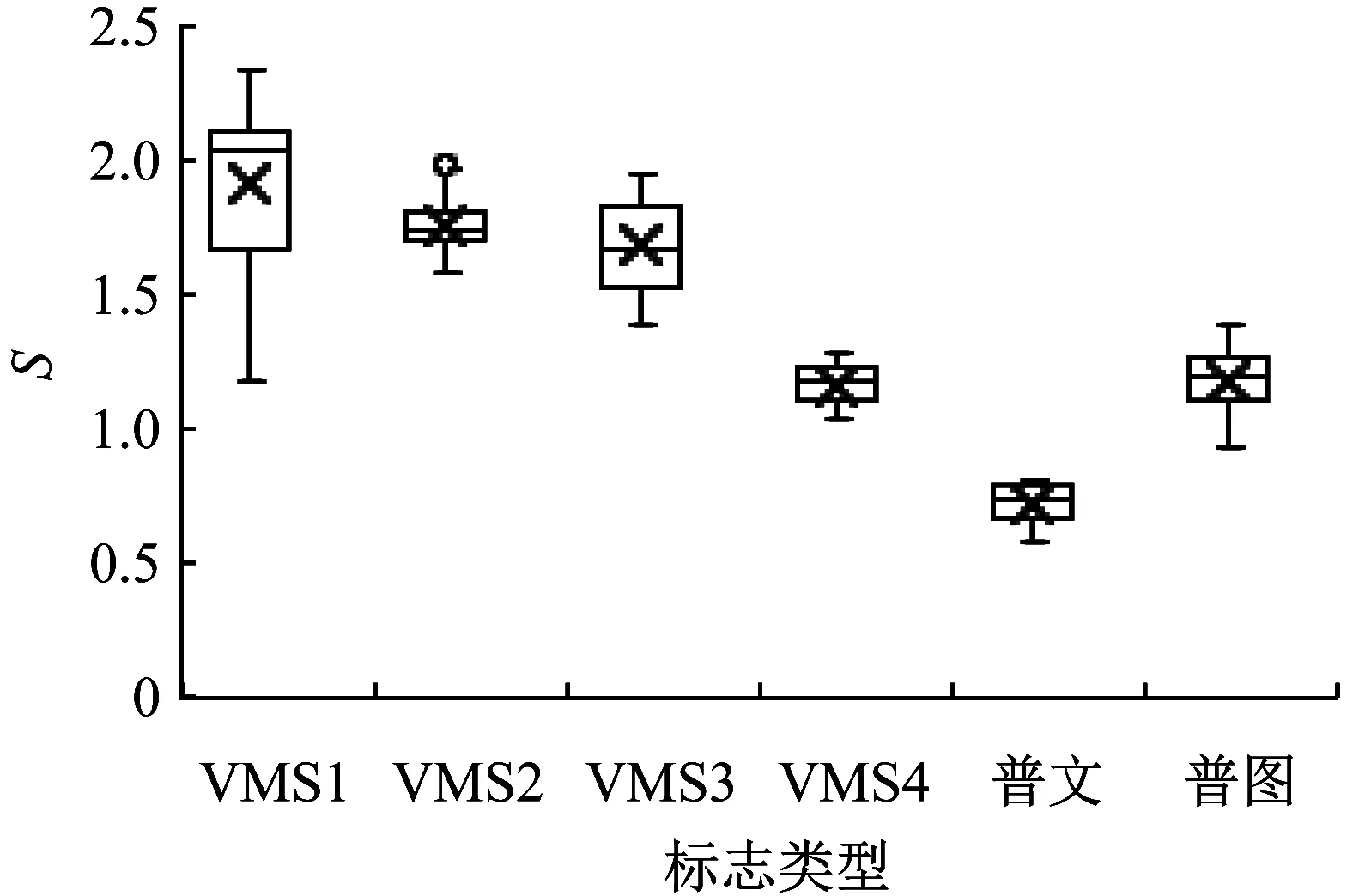
图13 不同标志视认过程中S箱形图Fig.13 Boxplot of S when recognizing different traffic signs
4.3 VMS版面要素组合推荐
基于单指标数据对比、非参数多元方差分析、指标因子分析方法,全面比较与分析了VMS诱导效果、驾驶行为特性、视认行为特性,结果表明VMS版面4最优。基于数据分析过程与结果,对高密度路网区高速公路VMS版面要素组合提出如下推荐做法:
(1)VMS版面采用拓扑图表示路网形状,显示路网范围以下游临近互通为起点,以所在高速公路行驶方向最近的枢纽互通为终点。VMS版面中表示路网的图形应按驾驶员行进方向观看路网的方式放置,即驾驶员所处的位置总是处于标志的最下方,并对当前所处位置进行醒目标注。
(2)VMS版面中路网图形边缘需标注所示路网可达地名,路网中互通均以圆形表示,均采用白色三角标识路段指向。枢纽互通相连的高速公路采用平纵相连的光带表示;略去通过一般互通与高速公路相连的其他道路线形,并标注互通名和短横线以示该互通的通达性。
(3)采用红、黄、绿3种颜色线条表示各路段实时的交通状况,红色表示拥堵,黄色表示行驶缓慢,绿色表示畅通。
(4)VMS版面下方辅以文字对路况进行描述和出行建议,版面地名选取、版面文字和尺寸设计均参照《道路交通标志和标线》(GB 5768—2009)进行设置。
5 结论
采用驾驶模拟试验的方法,综合分析VMS诱导效果、驾驶行为特性、视认行为特性,对高密度路网区高速公路的VMS版面要素组合形式进行研究并对高密度路网区VMS版面元素组合做出推荐:采用平纵光带、短横线表示拓扑式路网中的高速公路、其他道路,圆形表示互通;红、黄、绿色分别表示拥堵、缓行、畅通3种路况;白色三角标注路段指向,枢纽互通处标注地名,一般互通处互通名,对驾驶员所处位置进行醒目标注,为VMS版面设计提供了参考。提出了能综合反映驾驶员视认过程中各项驾驶行为指标共同特征的参数S,并给出其表达式,实现对驾驶行为的多元量化评价,对VMS版面的方案比选提供参考。本文仅开展了驾驶模拟仿真实验且招募被试驾驶员未涵盖所有年龄层次,后续研究将招募多种年龄、驾龄层次驾驶员继续进行自然室外实车试验对驾驶模拟试验结果进行进一步验证。
作者贡献说明:
荆迪菲:实验设计,数据处理分析,论文撰写。
宋灿灿:指导论文撰写,修改与定稿。
郭忠印:研究思路提供,论文审阅与定稿。
高华睿:参与实验实施。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
农村青少年科学探究(2022年6期)2022-10-09
农村青少年科学探究(2022年4期)2022-07-29
今日农业(2021年17期)2021-11-26
中国外汇(2019年12期)2019-10-10
赤水源(2018年6期)2018-12-06
环球飞行(2018年7期)2018-06-27
中国经济周刊(2016年34期)2016-09-02
互联网天地(2016年2期)2016-05-04
台声(2014年9期)2014-02-13
