
基于UniTire轮胎模型的汽车行驶速度估计
2021-07-09 04:46李静王晨张家旭
华南理工大学学报(自然科学版) 2021年5期
李静 王晨 张家旭,2†
(1.吉林大学 汽车仿真与控制国家重点实验室,吉林 长春 130011; 2.中国第一汽车集团有限公司智能网联研发院,吉林 长春 130011)
目前,无人驾驶汽车是提高道路交通安全性和缓解交通压力的有效手段,而车速是无人驾驶汽车实现高精度定位与导航、高级巡航控制和编队巡航控制等功能的必要反馈信息。直接测量车速信息面临传感器成本高、可靠性差和装配难度大等问题,因此,基于估计算法的车速信息软测量技术得到国内外学者的广泛关注。
基于估计算法的车速信息软测量技术现有的研究成果,可按照名义模型状态划分为基于连续状态估计算法开发的车速信息软测量技术和基于卡尔曼滤波器开发的车速信息软测量技术。文献[1]融合高阶滑模观测器和超螺旋滑模观测器,实现轮胎力和车速信息的并行估计;文献[2]基于随机游走模型建立描述车速和横摆角速度动态的汽车动力学模型,并采用非线性估计方法实现车速信息的实时估计;文献[3]利用泰勒公式在汽车工作点附近局部线性化非线性汽车动力学模型,并采用扩展龙伯格观测器实现车速信息的实时估计;文献[4]以包含纵向、侧向和横摆运动的汽车动力学模型为基础,利用包含阻尼因子的降阶滑模观测器实时估计车速信息;文献[5]以包含车速、加速度和横摆角速度信息的汽车运动学为基础,基于鲁棒H∞滤波方法对车速信息进行估计。上述车速信息的软测量技术均是基于连续状态估计算法开发的,虽然得到的车速信息精度高,但是算法的计算负荷大,难以运行于嵌入式处理器上。
相对于基于连续状态估计算法开发的车速信息软测量技术,基于卡尔曼滤波器开发的车速信息软测量技术运算效率更高,更适用于嵌入式处理器,便于工程应用。文献[6]以线性二自由度汽车模型为基础,采用扩展卡尔曼滤波器对车速信息进行估计;文献[7]建立级联结构的汽车动力学模型,并借助扩展卡尔曼滤波器并行估计车速信息和轮胎力信息;文献[8]采用七自由度动力学模型描述汽车的动力学特性,并借助无迹卡尔曼滤波器实现车速信息的软测量;文献[9]假设已知非线性汽车动力学模型的过程噪声和观测噪声,借助无迹卡尔曼滤波器对车速信息进行实时估计;文献[10]采用三自由度动力学模型描述汽车的动力学特性,并借助容积卡尔曼滤波器实现车速信息的软测量。相对于扩展卡尔曼滤波器、无迹卡尔曼滤波器和容积卡尔曼滤波器,强跟踪中心差分卡尔曼滤波器(STCDKF)因在其计算过程中引入中心差分和正交性原理而具有更高的的运算效率和更好的滤波精度[11- 12]。
同时,对于上述基于连续状态估计算法开发的车速信息软测量技术和基于卡尔曼滤波器开发的车速信息软测量技术研究成果而言,高精度的轮胎模型是决定汽车速度估算精度的重要因素,而准确获取轮胎模型特征参数是建立高精度轮胎模型的核心要素之一。对于吉林大学郭孔辉院士提出的UniTire轮胎模型[13],文献[14]基于Levenberg-Marquardt算法辨识UniTire轮胎模型的特征参数,但Levenberg-Marquardt算法仅能在局部区域内搜索UniTire轮胎模型的特征参数,辨识结果并非理论上的全局最优解。文献[15]基于非线性动态规划算法辨识UniTire轮胎模型的特征参数,但非线性动态规划方法的初值选择较多地依赖工程经验。为此,文献[16- 18]将遗传算法、粒子群优化算法、自适应差分进化算法等启发式智能搜索算法引入到轮胎模型的特征参数辨识中,但启发式智能搜索算法局部搜索能力较差,无法辨识出轮胎模型特征参数的最优解。
鉴于此,本文提出一种基于UniTire轮胎模型的汽车行驶速度估计方法。首先,基于UniTire轮胎模型建立包含汽车纵向、侧向和横摆动态的车速估计名义模型。为解决数值优化算法的全局搜索能力差和启发式智能搜索算法的局部搜索能力差问题,先利用自适应遗传算法的全局搜索优势辨识出UniTire轮胎模型的特征参数近似解,再利用拟牛顿法的局部搜索优势辨识出UniTire轮胎模型特征参数的最优解,从而为汽车行驶速度估计提供高精度的模型基础。随后,以车速估计名义模型的过程噪声和观测噪声为调度变量,利用强跟踪中心差分卡尔曼滤波器设计一簇车速估计器,并采用交互式多模型(IMM)算法对基于强跟踪中心差分卡尔曼滤波器的车速估计器簇的输出结果进行平滑融合。最后,利用整车级硬件在环仿真平台对所提出的基于交互式强跟踪中心差分卡尔曼滤波器的车速估计算法的可行性和有效性进行验证。
1 车辆动力学模型
如图1所示,建立包含纵向运动、侧向运动、横摆运动的车辆动力学模型作为交互式强跟踪中心差分卡尔曼滤波器的名义模型。由达朗贝尔原理可得,车辆动力学模型的微分方程如下[19]。

图1 车辆动力学模型示意图
纵向运动:
(1)
(2)
侧向运动:
(3)
(4)
横摆运动:
(5)
式中:vx、vy和r分别为汽车纵向速度、侧向速度和横摆角速度;ax和ay分别为汽车纵向加速度和侧向加速度;m和Iz分别为整车质量和整车绕垂直轴的转动惯量;tf和tr分别为前轮轮距和后轮轮距;l1和l2分别为整车质心到前、后轴的距离;δ为前轮转角;Fxi(i=1,2,3,4)和Fyi(i=1,2,3,4)分别为4个车轮上的纵向力和侧向力。
基于UniTire轮胎模型的纵向力Fx可表示为[19]
(6)
μx=μxs+(μx0-μxs)·
(7)
(8)

(9)
(10)
由式(6)-(10)可以发现,确定UniTire轮胎模型的纵向力Fx需要辨识的特征参数向量为[c1c2…c10]。
基于UniTire轮胎模型的侧向力Fy可表示为[19]
(11)
μy=μys+(μy0-μys)·
(12)
(13)

(14)
(15)
由式(11)-(15)可以发现,确定UniTire轮胎模型的侧向力Fy需要辨识的特征参数向量为[b1b2…b10]。
定义系统的状态向量、输入向量和观测向量分别为
x=[vxvyr]T
(16)
u=[δw1w2w3w4]T
(17)
y=[axayr]T
(18)
式中,w1-w4为4个车轮轮速。
利用式(16)-(18)定义的系统状态向量、输入向量和观测向量,将式(1)-(5)描述的7自由度车辆动力学模型离散化为如下形式的状态方程和观测方程:
(19)
式中,wk和gk为相互独立的零均值过程高斯白噪声和零均值观测高斯白噪声,二者的协方差矩阵分别为Q和R;f(·)和h(·)分别为状态方程函数和观测方程函数。
2 UniTire轮胎模型特征参数辨识
2.1 自适应遗传算法
UniTire轮胎模型中待辨识特征参数向量的近似解通过自适应遗传算法进行求解。自适应遗传算法的计算过程包括确定编码方式、确定初始种群规模、确定个体适应度、选择运算、自适应交叉和变异运算。
设定UniTire轮胎模型中待辨识特征参数向量元素取值范围为[κmin,j,κmax,j],则UniTire轮胎模型中待辨识特征参数向量元素格雷码编码为
κj=κmin,j+Ujdj
(20)
式中,dj和Uj分别为子区间长度和搜索步数,可表示为
(21)
(22)
式中:{g(j,k)|k=1,2,…,m}为格雷码数组;⊕为异或运算符。
利用广义海明距离产生均匀分布的初始种群为
Gij≥(L-l),i,j=1,2,…,N;i≠j
(23)
式中:N为初始种群的规模大小;Gij为种群中任意两个个体之间的广义海明距离;l=int(L/2),为种群中任意两个个体之间的最小广义海明距离;L为编码长度。
假设yi,sim为UniTire轮胎模型计算值;yi,test为轮胎试验数据,定义二者的残差ε为
(24)
基于式(24)描述的UniTire轮胎模型计算值与轮胎试验数据的残差,定义个体适应度F为
(25)
采用Metrolpis接收准则建立当前个体i到新个体j的转移概率Pk为
(26)
式中:F(i)和F(j)分别为个体i交叉变异前适应度和个体j交叉变异后适应度;T为当前温度。
为了避免产生早熟收敛问题,采用自适应算法自动调整交叉概率pc和变异概率pm:
(27)
2.2 拟牛顿法
将自适应遗传算法辨识的UniTire轮胎模型特征参数向量作为拟牛顿法的初始值,利用拟牛顿法在近似解邻近域的局部搜索优势获得UniTire轮胎模型特征参数向量的最优解。将目标函数f(x)在点xk附近二次逼近为
(28)
式中:d为偏差量;gk=f(xk);Bk为非奇异的对称矩阵,可表示为[14]
(29)
式中,sk为相邻时刻状态点之差;vk为相邻时刻梯度向量之差。
基于式(28)确定式(29)描述的搜索方向:
(30)
基于式(30)描述的搜索方向得到:
xk+1=xk+αkdk
(31)
式中,αk为搜索步长,可通过式(32)描述的精确线搜索求解:
(32)
以‖gk‖2≤ε为终止条件,由式(28)-(32)产生的迭代运算即可得到UniTire轮胎模型特征参数向量的最优解。
3 混合滤波算法
3.1 强跟踪中心差分卡尔曼滤波器
强跟踪中心差分卡尔曼滤波器采用中心差分变换代替非线性函数的雅克比矩阵计算过程,提高了算法的运算效率。计算过程包括时间更新和量测更新两部分。
(1)时间更新
(33)
(34)
式中,h2≥1,为计算系数。
(35)
式中,γi,k+1|k为Sigma点ξi,k经过非线性状态函数的输出,可表示为
γi,k+1|k=f(ξi,k,uk),i=0,1,…,2n
(36)
基于正交性原理,将式(34)修正为
(37)
式中,λk+1为渐消因子矩阵,可表示为
λk+1=
(38)
式中:tr(·)为求矩阵迹的算子;Nk+1和Mk+1可表示为
Nk+1=Vk+1-R-

(39)
σ=0.95。

(40)

(41)

(42)

(43)
(2)量测更新

(44)
3.2 交互式多模型算法


(45)

(2)输入交互:
(46)
(3)采用式(33)-(44)对每个模型执行时间更新和量测更新。
(4)模型概率更新:
(47)
(5)交互输出:
(48)
4 硬件在环试验验证
本节利用图2所示的整车级硬件在环仿真平台,对所提出的基于交互式强跟踪中心差分卡尔曼滤波器的车速估计算法的可行性和有效性进行验证,并且将试验结果与基于强跟踪中心差分卡尔曼滤波器的车速估计算法进行对比分析。
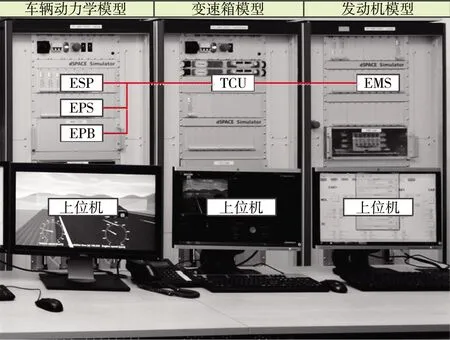
图2 整车级硬件在环仿真平台
在利用整车级硬件在环仿真平台验证之前,本文将某公司生产的型号为225/55R17轮胎试验数据作为辨识参考输入。试验过程中,轮胎外倾角设置为0°,轮胎垂直载荷Fz分别设置为2 800、5 700和8 600 N。基于上述试验数据,利用自适应遗传算法辨识UniTire轮胎模型特征参数向量的近似解,再利用拟牛顿算法求解UniTire轮胎模型特征参数向量的精确解。将辨识结果与基于遗传算法的UniTire轮胎模型特征参数向量的辨识结果进行对比分析,如图3所示。由图可知,本文提出的基于自适应遗传算法和拟牛顿法的UniTire轮胎模型特征参数辨识结果,与单纯应用遗传算法的UniTire轮胎模型特征参数辨识结果及试验数据基本吻合,但本文提出的基于自适应遗传算法和拟牛顿法的UniTire轮胎模型特征参数辨识方法具有更高的辨识精度。残差分析表明,单纯应用遗传算法的UniTire轮胎模型特征参数辨识方法残差均小于7%,本文提出方法的残差均小于3.6%,可以为无人驾驶汽车速度估计提供更高精度的模型基础。


图3 UniTire轮胎模型纵向力与侧向力辨识结果
在利用整车级硬件在环仿真平台验证过程中,基于交互式强跟踪中心差分卡尔曼滤波器的车速估计算法的过程高斯白噪声和观测高斯白噪声的协方差矩阵设置为Q1=0.001I3×3,Q2=0.01I3×3,Q3=0.1I3×3,R1=0.001I3×3,R2=0.01I3×3和R3=0.1I3×3;基于强跟踪中心差分卡尔曼滤波器的车速估计算法的过程高斯白噪声和观测高斯白噪声的协方差矩阵设置为Q1=0.001I3×3和R1=0.001I3×3。
4.1 J-turn工况
在J-turn工况下,初始车速为33.33 m/s,汽车加速度和前轮转向角如图4(a)所示,仿真对比结果见图4(b)-4(d)。
如图4(b)-4(d)所示,针对汽车横摆角速度,基于交互式强跟踪中心差分卡尔曼滤波器的车速估计算法(STCDKF)和本文提出的基于交互式强跟踪中心差分卡尔曼滤波器的车速估计算法(IMM-STCDKF)均具有较高的估计精度;同时,相对于基于交互式强跟踪中心差分卡尔曼滤波器的车速估计算法,本文提出的基于交互式强跟踪中心差分卡尔曼滤波器的车速估计算法对汽车纵向速度和侧向速度的估计精度更高,尤其是在汽车侧向加速度较大时,二者对汽车侧向速度的估计结果差异更明显。
4.2 鱼钩工况
在鱼钩工况下,初始车速为33.33 m/s,汽车加速度和前轮转向角如图5(a)所示,仿真对比结果见图5(b)-5(d)。
如图5(b)-5(d)所示,基于交互式强跟踪中心差分卡尔曼滤波器的车速估计算法和本文提出的基于交互式强跟踪中心差分卡尔曼滤波器的车速估计算法对汽车极限行驶工况均具有较强的鲁棒稳定性,且对汽车横摆角速度均呈现出较高的估计精度;同时,相对于基于交互式强跟踪中心差分卡尔曼滤波器的车速估计算法,本文提出的车速估计算法对汽车纵向速度和侧向速度的估计精度更高,并且在汽车侧向加速度较大时,本文提出的车速估计算法对汽车侧向速度依然保持较高的估计精度。
5 结论
(1)基于UniTire轮胎模型建立包含汽车纵向、侧向和横摆动态的车速估计名义模型,并利用自适应遗传算法的全局搜索优势和拟牛顿法的局部搜索优势辨识出UniTire轮胎模型特征参数的全局最优解,提高了车速估计名义模型的精度。
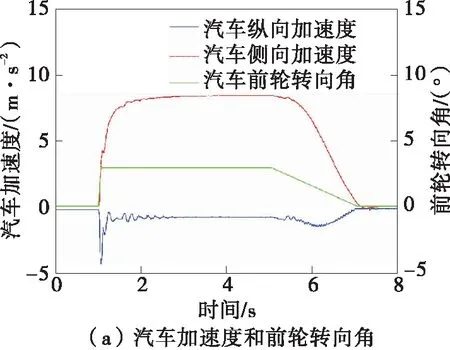
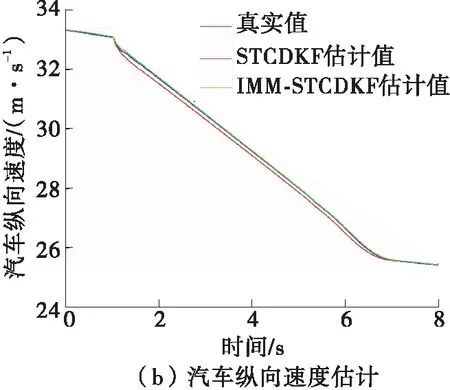

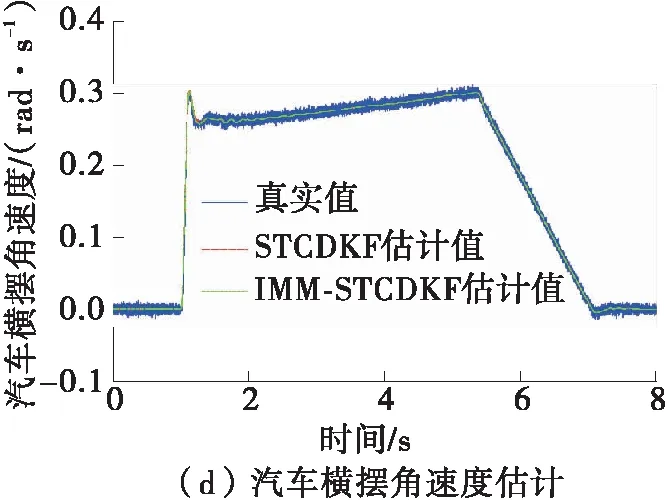
图4 J-turn工况仿真结果
(2)将车速估计名义模型的过程噪声和观测噪声作为调度变量,利用强跟踪中心差分卡尔曼滤波器设计一簇车速估计器,并采用交互式多模型算法对基于强跟踪中心差分卡尔曼滤波器的车速估计器簇的输出结果进行平滑融合,使车速信息估计算法对系统噪声统计特性具有更好的自适应能力。

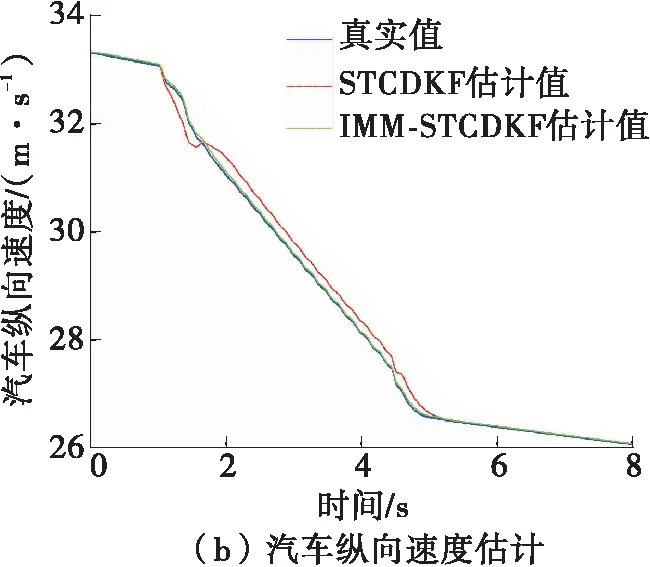
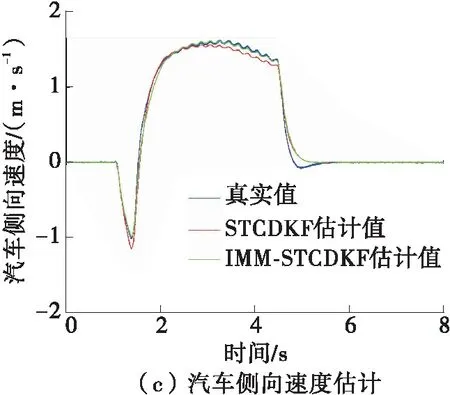

图5 鱼钩工况仿真结果
(3)利用整车级硬件在环仿真平台对所提出的基于交互式强跟踪中心差分卡尔曼滤波器的车速估计算法的可行性和有效性进行验证,结果表明,相对于基于强跟踪中心差分卡尔曼滤波器的车速信息估计算法,本文提出的车速信息估计算法具有更高的估计精度。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
舰船科学技术(2022年10期)2022-06-17
军民两用技术与产品(2022年2期)2022-06-01
北京航空航天大学学报(2021年4期)2021-11-24
制导与引信(2021年2期)2021-09-08
北京航空航天大学学报(2021年7期)2021-08-13
学校教育研究(2020年3期)2020-02-18
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
电子技术与软件工程(2016年22期)2016-12-26
