一种面向4WID-4WIS载人月球车的控制系统
2021-07-09 06:41:56邵斌澄缪天缘周永辉李会军宋爱国
载人航天 2021年3期
邵斌澄 1,缪天缘 1,周永辉 2,李会军 1,宋爱国
(1.东南大学仪器科学与工程学院,南京 210096;2.北京空间飞行器总体设计部,北京 100094)
1 引言
载人登月始终是载人航天的主要目标之一,2019年美国NASA部署了阿尔忒弥斯登月任务,明确要在2024年之前实现登月,俄罗斯、日本与欧洲多国陆续加强了载人登月的研究。中国载人探月工程初步规划为首次登月、月球站建设和月球站运营三大阶段,载人月球车作为任务的核心构成,承担着航天员高速转移、物资运输、应急救援等重要任务,研究月球车的人机交互操作方式及动力控制模式尤其重要。
载人月球车本质上隶属于大型特种电动车,针对电驱动车辆的控制模式及相关算法,国内外学者均进行了大量研究。刘成强等选择转速、电流双闭环作为控制策略,对电机驱动系统进行了动态模拟仿真,设计的电机控制系统具备良好的转速响应特性,可以满足不同工况条件下的输出特性需求;Yin等根据两轮垂直载荷的不同,将扭矩分配给车后驱两轮并通过模糊PID控制使得车辆的启动滑移率变小,提高了运动效率;Ren等提出了一种基于PID控制的电子差速系统控制算法,显著提高了车辆的加速性能。以上研究都只涉及两轮驱动的控制,未考虑多轮协同工作的问题,而多电机独立驱动因其结构的特殊性和复杂性,已成为限制四轮独立驱动(Four-Wheel-Independent-Drive,4WID)电动汽车发展的瓶颈之一。若多机协调控制不当,会出现行进轮间相互拖拽的现象,不仅增加功耗,而且可能会破坏运行稳定性,导致事故发生。因此,多电机协调控制的好坏将直接影响车辆的可靠性、安全性和经济性。针对4WID系统中多电机协调运行问题,Zhang等提出了一种自适应滑模容错协调控制(Adaptive Sliding Mode Fault Tolerant Coordinated Control,ASM-FTC)以提高系统的稳定性,在有电机故障的工况下依旧能完成任务;Li等开发了一种自适应容错跟踪控制方案,能够补偿车辆不确定的动力学干扰,有效地应对驱动意外故障的情况;Zhang等为了提高电动汽车的横摆稳定性,建立了分级控制结构,上层为运动跟踪层,下层为转矩分配层,并基于dSPACE系统设计了原型试验台,采用最优转矩分配控制策略能有效地提高轮式电机驱动电动汽车的稳定性。上述四轮独立车辆分层控制方案虽然能同时保证车辆的稳定性和操纵性,但控制方案复杂,涉及的工作量分配比较耗时。Zhang等等提出了一种直接独立控制4个车轮的方法,不涉及复杂的层次结构,并通过直线和转向操纵验证方法的有效性,但不适用于有车轮打滑的情况;Wang等基于机械式的转向提出了一种差速驱动辅助转向(Differential Drive Assisted Steering,DDAS)系统,通过两侧车轮之间的扭矩差来提高转向的轻便性,可替代传统助力转向执行器。
综上,需设计一种能保证行进轮和转向轮协同工作、可应对车轮陷坑打滑等复杂工况、符合人因工程学、简便有效且完整的控制系统,以提升载人月球车的机动性、稳定性。本文提出了一种面向四轮独立驱动、独立转向的电动载人月球车控制系统,为应对复杂的路面环境,设计了四轮力矩分配策略、电子差速锁策略,建立了车辆转向运动学模型,提出了满足四轮及前驱两轮阿克曼关系的横向控制算法,并完成了相关的地面控制试验。
2 系统构成
载人月球车控制系统共分为4个模块:电源系统、电力驱动系统、感知系统和整车动力控制系统,总体的构成如图1所示。

图1 载人月球车控制系统框图Fig.1 Block diagram of control system for manned lunar rover
电源系统为其他模块供电,由动力锂电池、降压模块及逆变器构成,为实时检测电池状态,保证供电安全,设置了电量、温度监控装置;电力驱动系统由电机、编码器、驱动控制器及驱动力传动装置组成,是载人月球车的运动执行系统;感知系统主要为视觉传感器,包括长焦远景摄像头及4个广角摄像头,为驾驶员提供较远的车前视野及广阔的四周画面;整车动力控制系统包括整车控制器PC、EtherCAT通信网络、以太网网络、罗技G29方向盘、车载控制台仪表开关及其信号采集单片机装置等,此系统接收其他系统的信号,通过显控ADS软件直接展示给驾驶员,驾驶员通过方向盘及触摸屏进行交互操作,控制指令经EtherCAT通信网络传输至电力驱动模块,从而达到车辆控制目的。
3 电力驱动系统及通信网络
由于所有行进电机具有独立驱动、能够快速实现转矩响应且转矩易于测量等诸多特点,所以四轮电驱车相比于传统驱动形式的汽车具有更高的控制灵活性。同时,分布式驱动结构不仅能降低对机械传动零部件的要求,而且降低了电机驱动系统的母线电压,从而提高了整车电气安全性。此外,电机分布式布置使得车辆底盘空间布置更灵活,有利于提高车辆的被动安全性。
本文选取交流三相伺服电机作为执行器,相比于直流电机,具有效率高、体积小、易维护、坚实可靠、使用周期长等优势。具体电机性能如表1所示。

表1 电机性能表Table 1 Motor parameter table
车辆控制系统中,通信网络的优劣决定了信号及数据传输的实时性及稳定性。EtherCAT是一种开放的实时以太网通信协议,具有传输速率快、数据量大、实时性好等特点,能满足大规模控制装置的控制需求。与传统的线场总线相比,EtherCAT网络可以挂载最多65 535个设备,单次传输字节数可达1498个,性能远高于传统总线方式。CANopen协议是一种基于CAN通信系统的通信协议,常用于运动控制网络。通过将CoE(Canopen over Ethercat)嵌入到EtherCAT中,可兼容支持CANopen协议的驱动设备。本文基于工业以太网EtherCAT总线进行布局,具体如图2所示。

图2 EtherCAT通信网络设计图Fig.2 EtherCAT communication network design
使用Elmo伺服驱动,4组行进驱动器与4组转向驱动器处于不同网段,通过功能区分,互不干扰,通过专用EtherCAT交换机与主站工控机相连接,8组驱动器作为从站。同时每个网段内的4台驱动器直接通过网线串联,实现多驱动器的数据收发。主站工控机向从站驱动器发送控制指令,设定使能、电流、速度和位置信号,同时从站驱动器将各参数的实测值上传回主站。
4 整车动力控制系统
整车动力控制系统以控制PC内的车辆先进设计系统(Advanced Design System,ADS)控制软件为核心,以EtherCAT和传统以太网2个通信网络为纽带,以车载控制台仪表开关、方向盘和触控屏为人机输入,以驱动器及电机为控制对象,以PID、扭矩分配策略及阿克曼转向方法为控制算法,实时控制输出的结果及传感器图像信息均在人机交互显示软件界面上显示。
4.1 车辆ADS控制软件设计
车辆ADS控制软件为控制系统的核心,集成了控制算法、指令封装、界面显示、用户调试等功能,具体如下:
1)控制指令封装功能。将行进与转向电机的控制指令封装成模块,例如行进电流输入模块、转向速度输入模块等,便于算法进行调用。
2)车体运动信息显示功能。实时从驱动器读取所有电机的使能信息,各行进轮的转速值、电流值,各转向轮的角度值、电流值等,通过换算,在软件界面仪表盘上显示。
3)方向盘数据输入及显示功能。实时显示速度设置值、实时的方向盘转向角度、加减速触发状态、停止触发状态、行进与转向模式切换信息等。
4)视觉图像显示功能。显示车顶部大巴摄像头实时图像与车前、后、左、右4个广角摄像头的实时图像,通过实时流传输协议(Real Time Streaming Protocol,RTSP)传输。软件通过访问车载的RTSP视屏盒获取流数据。
5)用户调试功能。遇到特殊情况时,驾驶员启用此功能,可单独对4个行进电机进行使能操作、监控实时速度、实时电流,可直接控制电流使电机转动。也可对4个转向电机进行使能操作、监控实时角度,可直接使用点动模式使电机转动。并且实时记录整车运动速度、各轮转角数据,保存至本地文件中。
车辆ADS控制软件的工作流程如图3所示。

图3 车辆ADS控制软件工作流程图Fig.3 Work flow chart of vehicle ADS control software
当驾驶员打开整车控制PC后,车辆ADS控制软件将会自启动并进行软件的功能自检,包括串口通信、内存共享、RTSP视频流功能是否正常,如果检测项测试都正常,则显示主界面,否则对话框提示未通过项,并关闭软件。这样可以保证软件的可执行性与稳定性,便于驾驶员执行后续的监测控制任务。当需要进行车辆运动操作时,需先激活方向盘的控制,开启电机使能后,通过方向盘的拨钮设置车速,通过按钮实现挡位及控制模式的切换,包括前进与后退挡位切换和前桥转向与四轮转向模式的切换,以便于驾驶员机动灵活地进行控制,或者在特殊故障情况下完成操作任务。当完成任务后,驾驶员需断开电机使能,关闭软件。
4.2 控制算法设计
载人月球车的控制主要分为纵向运动控制与横向转向控制。
4.2.1 车辆纵向控制算法设计
纵向运动采用基于PD的整车转速控制与车轮力矩分配策略,利用四轮驱动力矩独立可控的优势,采用基于车轮打滑情况的扭矩分配规则来实现协调分配。控制算法框图如图4所示。

图4 车辆纵向控制算法框图Fig.4 Block diagram of vehicle longitudinal control algorithm
整车所需要的扭矩T
如公式(1)和(2)所示:
K
及K
为PID调节的系数,K
为反电动势系数,V
为驾驶员用方向盘设置的整车目标速度,V
为整车实际行进速度,由行进驱动器组实时反馈,ΔV
为速度误差,V
为前一时刻的速度误差,V
为前一时刻的目标速度,M
为整车质量,取值为3500 kg,T
为克服动摩擦需要的扭矩,其公式如(3)所示:
μ
为动摩擦系数,取0.003,g
为重力加速度,因在地球表面进行试验,取9.8 m/s。T
~T
分别为分配给左前轮、右前轮、左后轮与右后轮的扭矩,具体计算如公式(4)、(5)所示:
N
为不打滑车轮的数量。为判断车轮是否打滑,结合本文月球车的具体情况,设定了一个速度阈值V
=1 km/h,若某时刻车轮的转速与四轮中最小转速差值的绝对值超过V
,便认定此车轮打滑,打滑轮不参与此时刻力矩的分配,只提供小电流输入,维持其转动,实现了电子差速锁的功能,保证扭矩分配的合理性4.2.2 车辆横向控制算法设计
横向运动采用基于阿克曼转向模型的控制策略,该原理是在假定汽车前轮定位角为0,汽车行驶系统为刚性,汽车行驶中无侧向力的情况下,四轮绕同一圆心作纯滚动运动。
在车轮最大转角一定的情况下,为减小车辆转弯半径,采用四轮转向必定优于前驱两轮转向。考虑到特种车辆面向的工况较为复杂,本文默认使用四轮转向控制模式,当有意外情况,如后轮转向失效时,驾驶员可以在线手动切换成前驱两轮转向模式。
车辆横向控制算法如图5所示。

图5 车辆横向控制算法框图Fig.5 Block diagram of vehicle lateral control algorithm
在满足阿卡曼转向关系的前提下,每一个方向盘转角θ
都可映射到4个车轮的目标转角θ
~θ
,对每个车轮进行位置环的PID控制,将参考速度值写入EtherCAT驱动器,交流伺服电机工作在速度环,通过转向机构转化为4个车轮的转角,实现横向协同控制。前驱两轮转向的模型如图6所示。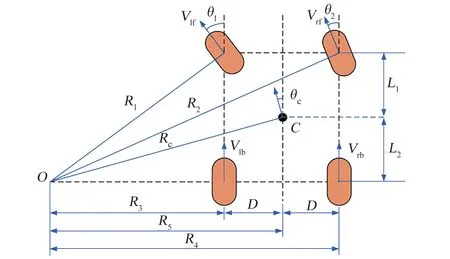
图6 前驱两轮转向模型示意图Fig.6 Schematic diagram of front axle two wheel steering model
以整车左转向为例,O
为整车转向圆心,C
为整车质心,L
为车辆前轴至车质量中心的轴距,L
为车辆后轴至车质量中心的轴距,D
为后轴轴距的1/
2,θ
为车辆转向角,R
为质心转弯半径,R
、R
为转向中心到左、右前轮距离,R
、R
为转向中心到两后轮的距离,R
为转向中心到车质量中心的垂直距离,τ
为整车宽长比,取1.0338。其中L
、L
、D
和τ
都为车辆基本参数。θ
、θ
是前桥两轮转角,右转时定义为正,θ
跟随方向盘的转角数据θ
,θ
根据阿克曼转向关系计算得出。根据几何关系,由公式(6)~(11)可计算出θ
的大小。
V
、右前轮V
、质量中心V
、左后轮V
及右后轮V
的速度,如公式(12):
L
=L
,因此转向时两内侧轮的转角相同,两外侧轮的转角也相同。依旧以整车左转为例,模型如图7所示。整车转向圆心O
与质心C
连线平行于车前后轴,R
~R
为圆心至4个车轮的距离,R
为整车的转弯半径,θ
~θ
为四轮的转向角度。由对称关系可知:R
=R
,θ
=θ
,R
=R
,θ
=θ
。
图7 四轮转向模型示意图Fig.7 Schematic diagram of four wheel steering model
由几何关系可得式(13)、(14):

θ
的大小,如式(15)所示:
根据速度瞬心特性可知,各质点的速度之比等于各点到瞬心的距离之比,可得式(16):

5 地面试验
为验证车辆纵向与横向控制算法设计的准确性与有效性,设计并进行了地面试验,包括多种速度的行进试验、爬坡试验及原地转向试验。
5.1 多种速度的行进试验
工况为水泥路面,略微有些起伏。使用方向盘加速及减速2个拨钮设置整车的目标速度V
,分为3档:1 km/h、2 km/h与3 km/h,实时记录目标速度与实际速度V
,监控四轮(左前轮、右前轮、左后轮和右后轮)的有效电流值i
~i
,结果如图8~10所示。图8表明目标速度为1 km/h时,整车运动速度曲线跟随较好,实际速度有上下小范围的波动,主要原因是因为车体4个轮子柔性较强,车体运动过程中有自发性抖动;整车稳定运动后速度误差在±0.2 km/h范围内;四轮实时电流平稳,平均值为7.5 A,峰值为12 A,力矩分配均匀。

图8 来回1 km/h条件下速度跟随及电流曲线图Fig.8 Velocity following and current curve diagram at 1 km/h back and forth
图9表明目标速度为2 km/h时,整车运动速度曲线跟随有滞后,稳定运动后速度误差在±0.3 km/h范围内;四轮实时电流较为平稳,平均值为11 A,峰值达到16 A。

图9 来回2 km/h条件下速度跟随及电流曲线图Fig.9 Velocity following and current curve diagram at 2 km/h back and forth
图10表明目标速度为3 km/h时,整车运动依旧有滞后,稳定运动后速度误差在±0.45 km/h范围内;四轮实时电流变化幅度增加,峰值达到25 A。

图10 来回3 km/h条件下速度跟随及电流曲线图Fig.10 Velocity following and current curve diagram at 3 km/h back and forth
5.2 爬坡试验
为研究车辆越障及爬坡性能,在路面设置小型障碍及2个并排放置的20°铸铁坡道,以4 km/h最大速度进行试验,结果如图11所示。
(3)利用PD-HFLWA和决策专家权重确定群体偏好矩阵其中为PD-HFLTS,表征以指标cy为基准,指标cn相对于指标cx的重要度;

图11 越障爬坡速度跟随及电流曲线图Fig.11 Obstacle crossing and climbing velocity following and current curve
由图11可知,整车运动分4个阶段。第1阶段为去程越障,速度跟随有一个小的滞后,接着快速接近并到达目标速度4 km/h,靠近坡道时减速停车,电流亦持续增加至21 A后衰减;第2阶段为去程爬坡,因爬坡初期扭矩不足,速度跟随滞后显著,当电流持续增大时,车速亦提升起来,越过坡道后减速停止;第3阶段为回程爬坡,电流峰值达到42 A(未超过驱动器峰值电流54 A),因越过坡道时未及时减速,导致车速过快导致超调;第4阶段为回程越障。该试验证明整车具备较好的越障及爬坡性能。
5.3 转向试验
车辆原地使用方向盘,设置目标转角±5°,在前驱转向模式和四轮转向模式下分别进行试验,实时记录目标角度θ
与四轮实际转角θ
~θ
的曲线,结果如图12和图13所示。
图12 前驱转向条件车轮转角及阿克曼误差曲线图Fig.12 Wheel angle and Ackerman error curve under front axle steering condition

图13 四轮转向条件车轮转角及相关误差曲线图Fig.13 Wheel angle and related error curve under four-wheel steering condition
前驱转向模式下,后两轮转角θ
与θ
始终为0°
。转角θ
为正,表明整车进行右转,右前轮转角θ
与目标值θ
一致,左前轮转角θ
始终小于θ
,θ
为负,表示整车左转,左前轮转角θ
与目标值θ
一致,右前轮转角θ
绝对值始终小于θ
绝对值,且满足公式(11)。两轮转角实时跟随目标角度,稳态误差小于0.01°。阿克曼转角误差定义为实际转向角度与模型理论角度的差值,可用于衡量两车轮转向的协同性,该误差小于0.06°。四轮转向模式下,所有轮都参与转向调节。目标转角θ
为正值,表明整车进行右转,θ
跟随目标值θ
,θ
始终小于θ,后驱轮转角θ
、θ
和前驱轮转角θ
、θ
大小一致,方向相反。θ
为负,表示整车左转,θ
跟随目标值θ
,θ
随动且满足公式(15)。控制跟随效果良好,稳态误差小于0.01°。阿克曼误差可衡量前驱两轮与后驱两轮的控制协同性,同侧转角误差可衡量左侧两轮与右侧两轮的控制协同性。由图可知,前驱轮阿克曼误差最大值为0.057°,后驱轮最大误差为0.048°,总体可控制在±0.03°范围内,左侧轮转角最大误差为0.04°,右侧最大误差为0.05°,整体上误差绝对值小于0.02°,转向过程中四轮协同性与稳定性良好。6 结论
1)本文构建了一套面向4WID-4WIS载人月球车的控制系统,设计了电源、电力驱动、感知和整车动力控制4个子模块,使用EtherCAT网络连接8套驱动-电机系统,实现低延时稳定控制,设计的车辆ADS控制软件具备良好人机交互性。
3)试验验证了算法的有效性及稳定性。纵向运动中,在1~3 km/h的目标速度下,整车速度跟随良好,力矩分配均匀,电流峰值分别达到12 A、16 A与25 A;月球车可翻越20°坡道;在前驱转向及四轮转向模式下,横向运动的稳态误差均小于0.01°,阿克曼误差均小于0.06°。
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
工业工程设计(2021年3期)2021-06-30 12:15:04
制造技术与机床(2017年6期)2018-01-19 02:41:07
解放军健康(2017年5期)2017-08-01 06:27:42
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
太空探索(2016年9期)2016-07-12 10:00:05
中学科技(2015年7期)2015-07-03 05:44:32
电源技术(2015年9期)2015-06-05 09:36:06
交通建设与管理(2015年13期)2015-03-20 15:18:48
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54