直流微网混合无源控制及系统分层控制策略
2021-07-05 03:12孙石涛王久和
电力系统及其自动化学报 2021年6期
孙石涛,王久和
(北京信息科技大学自动化学院,北京 100192)
近年来,随着分布式电源的不断发展,微电网越来越得到人们的关注,其中直流微电网由于不需要对电压的相位和频率进行控制,且无需考虑负载无功功率,使得其可控性和可靠性得到较大提高,具有广阔的发展前景。
当直流微电网系统中具有多个变换器及负载时,存在系统稳定性下降、功率不平衡等问题,对此,国内外学者分别从不同角度对控制策略及稳定性做出了改进和研究。下垂控制作为直流微电网传统的控制方式,不依赖通信算法、控制简单,且能够较好地平衡输出功率。但下垂控制在进行功率平衡或均分时是以降低输出电压为前提的,使得系统母线电压可能会出现一定偏差,当要同时兼顾母线电压和功率平衡时,下垂控制参数设定较为困难。文献[1]针对提升母线电压精度及均分输出电流提出协调控制策略,通过注入交流信号引入频率这一电参量,代替固定的电压设定值以适应不确定的线路阻抗,通过这种补偿策略可增加系统稳定性,然而在直流微电网控制回路中注入交流信号频率增加了控制和设计的难度。文献[2]针对母线电压分层控制下的直流微电网稳定性问题,通过增加阻尼电阻改善负载阻抗特性,使直流微电网系统稳定性得到提高。但设计仅对系统小信号稳定性做了研究,对大范围母线电压和负载功率变化时系统稳定性未作考虑。文献[3]提出用分配电流控制(decentralized current control)代替传统下垂控制中的电压外环。虽然在一定程度上提高了系统稳定性,但面对拓扑结构复杂多变的直流微网设计过程显得较为繁琐。文献[4-6]提出分层协调控制策略,改进了混合储能控制并通过设计优化调度方案提高系统对功率的优化,而为此造成的复杂拓扑结构容易导致系统运行不稳定、动态稳定性不足等现象。
近几年,基于通信网络的协调控制以及一些先进的非线性控制算法也逐渐应用到直流微电网的控制中。文献[7]提出了带非线性负载的分级自整定控制(hierarchical self-commissioning control),通过采用PID控制器和分散状态反馈控制器(decentralized state-feedback controller)作为主控制级和第二控制级,从而达到稳定电压和平衡负载功率的目标。该设计针对拓扑结构繁琐的直流微电网具有一定参考价值,但对于一般的直流微电网实用性较差。文献[8]将无源控制理论应用到直流微电网控制器设计中,并与自适应控制相结合,使得系统在具有较强鲁棒性的同时减小了稳态控制误差。但该设计过程是针对整个直流微电网建立状态平均模型,当单个变换器发生故障时容易导致整个系统崩溃。
针对以上控制策略研究的不足,本文提出将无源控制与母线电压分层控制策略相结合,通过建立各单元变换器状态平均模型,设计混合无源控制器以代替传统的下垂控制器。母线电压分层控制策略能够针对不同负载变化,及时调整各变换器控制策略。仿真结果表明,该控制策略具有较好的控制效果。
1 直流微网拓扑结构及各变换器数学模型
1.1 直流微电网拓扑结构
直流微电网具有多种拓扑结构,本文选取图1所示拓扑结构的直流微电网进行研究,该系统主要由两组光伏电池、储能装置、电力电子变换器和可调阻性负载构成。
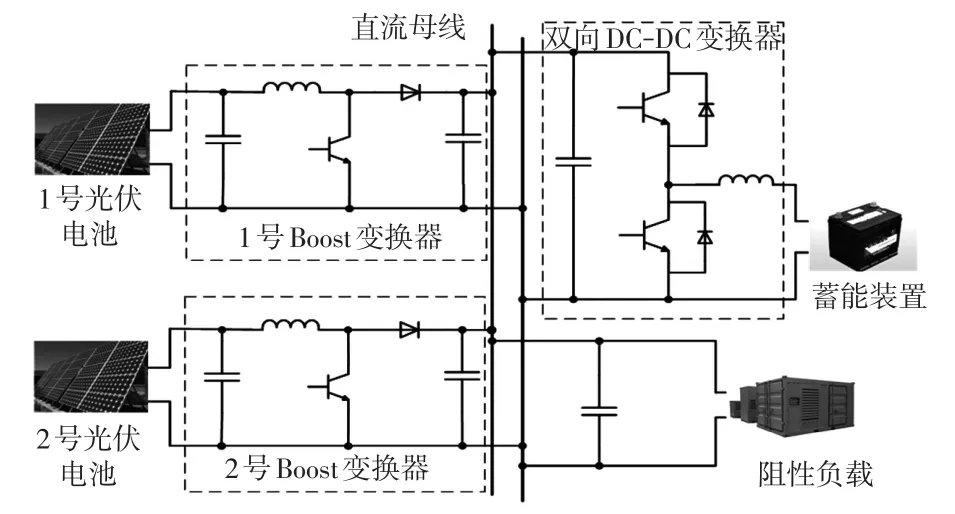
图1 直流微电网拓扑结构Fig.1 Topology of DC microgrid
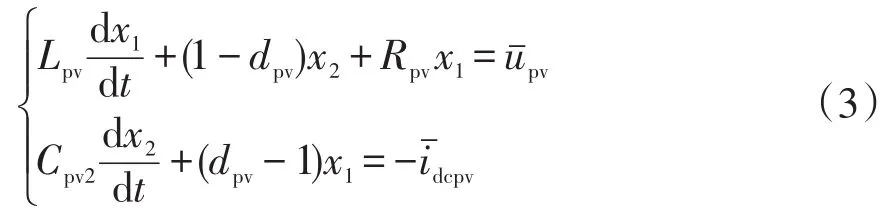
光伏单元电路如图2所示,图中Lpv、Rpv分别为电感及其等效串联电阻;Cpv1和Cpv2分别为光伏电池侧和母线侧电容;Spv为Boost变换器开关管;upv和iLpv分别为光伏电池输出电压和电感器电流;idcpv和ubus分别为Boost变换器输出电流和母线电压。
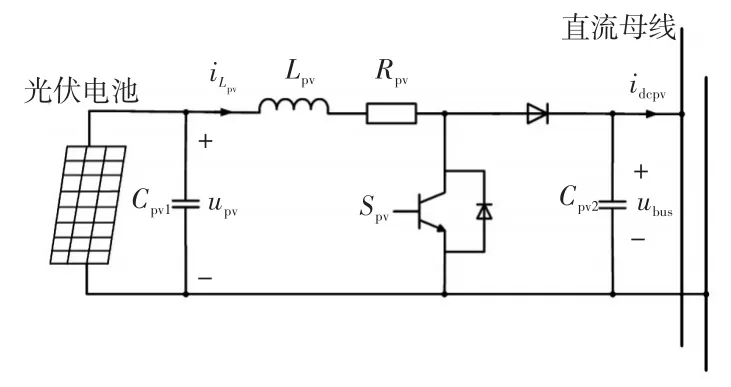
图2 光伏单元电路Fig.2 Circuit of PV unit
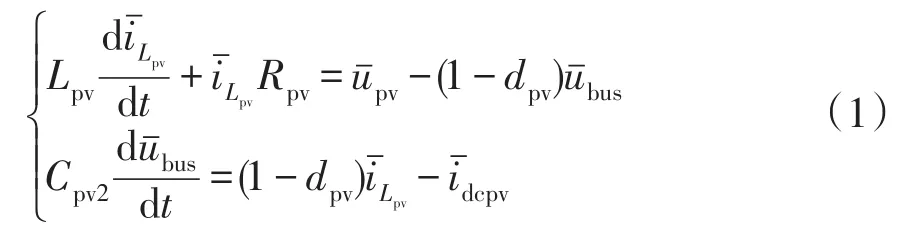
1.2 光伏单元变换器数学模型
1.3 储能单元变换器数学模型


图3 储能单元电路Fig.3 Circuit of energy-storage unit
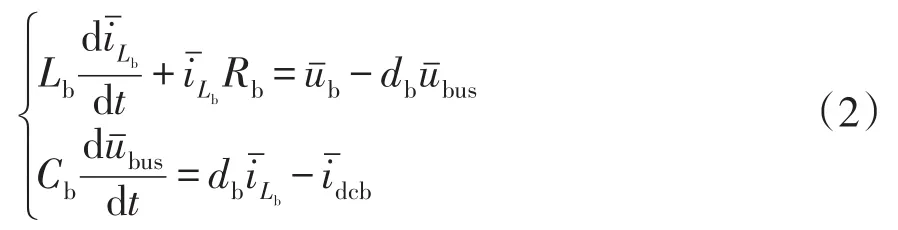
式中,db为开关管Sb2的占空比。
2 母线电压分层及控制策略研究
根据负载功率变化将母线电压分为不同控制层区,无需通信,可提高微电网的可靠性和动态性能。设定母线电压的工作范围380 V<ubus<420 V;蓄电池电荷量最大值Smax=0.85、最小值Smin=0.25;负载额定功率为PN,实际功率为P。将直流微电网划分为3个运行层区。在系统运行过程中,当蓄电池电荷量超出设定的上下限时,通过增加或减小负载功率以切换不同的控制策略。
2.1 第1运行层区及控制策略
层区1:410 V<ubus<420 V。当 P<PN,且蓄电池电荷量未超出设定的上下限时,光伏单元采用混合无源控制方式,储能单元采用无源控制方式,可稳定直流母线电压并对蓄电池充电。
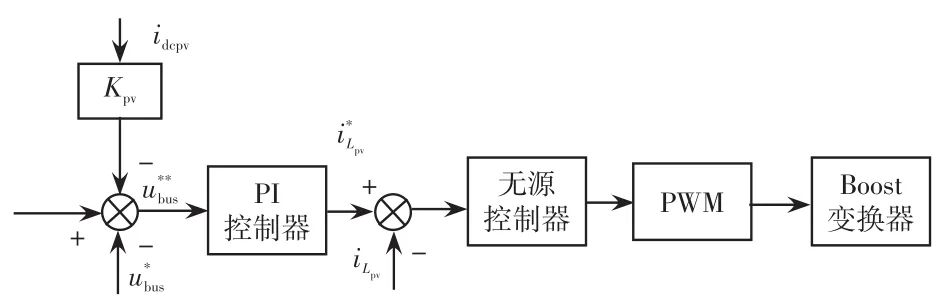
图4 光伏单元混合无源控制框图Fig.4 Block diagram of hybrid passivity-based control of PV unit
储能单元控制框图如图5所示。

图5 储能单元控制框图Fig.5 Control block diagram of energy-storage unit
2.2 第2运行层区及控制策略
层区2:395 V<ubus<410 V。当 P=PN,且蓄电池电荷量未超出设定的上下限时,光伏单元采用最大功率点跟踪MPPT(maximum power point tracking)控制方式,储能装置采用混合无源控制进行充电。
光伏单元MPPT控制框图如图6所示,其中MPPT控制通过电压扰动观察法实现,储能单元控制方式与层区1运行时控制方式相同。

图6 光伏单元MPPT控制框图Fig.6 MPPT control block diagram of PV unit
2.3 第3运行层区及控制策略
层区3:380 V<ubus<395 V。当 P>PN,且蓄电池电荷量未超出设定的上下限时,光伏单元采用MPPT控制模式,储能单元采用混合无源控制方式向负载供能。
层区3光伏单元控制方式与层区2光伏单元控制方式相同,储能单元控制方式与层区1储能单元控制方式相同。
3 混合无源控制器设计
以光伏单元为例给出无源控制器设计过程,储能单元无源控制器设计按照同样步骤进行,在此不再赘述。
3.1 光伏单元无源控制器设计
将式(3)写成EL模型


设状态变量与期望的误差为xe=x-x*,并取误差能量函数
(5) 川藏高速公路的大规模修建,人类活动在短时间内对坡体的应力场、渗流场、温度场等产生了较大的改变,使原有的自然营力条件下形成的边坡稳定性失去平衡而导致崩塌的发生,这是工程建设期间崩塌灾害呈现大规模上升的直接原因。

其对时间的导数为


将式(7)代入到式(6)中可得


从而使式(8)转换为

由于Rpv、Ra均为正定矩阵,故误差能量函数能够收敛,且收敛速度取决于(Rpv+Ra)。

由式(11)可得开关管驱动信号
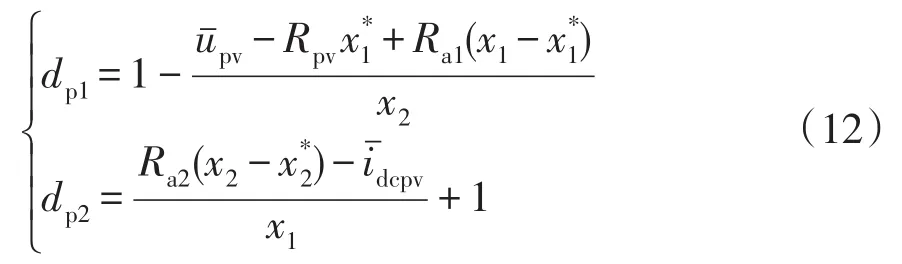
将驱动信号dp1、dp2分别带入到式(3)验证后得dp1为可实现的驱动信号。
3.2 混合无源控制器电压外环设计
由光伏单元混合无源控制框图4,PI控制作为电压外环得到电流期望值输入到无源控制器。表达式为

通过设定不同的虚拟阻抗,平衡光伏单元变换器输出电流。虚拟阻抗Kpv取值与母线电压的工作范围ΔU、最小值Umin和变换器额定功率Ppv有关,即


直流微电网控制总框图如图7所示。负载功率与额定功率通过功率比较模块进行比较,确定相应控制层区。当直流微电网运行于层区1时,开关J1、J2均连通下侧,采用无源控制,开关J3连通下侧低电平,开关J4连通上侧输出控制信号,双向DC-DC变换器工作在Buck状态;当直流微电网运行于层区2时,开关J1、J2均接通上侧,采用MPPT控制,开关J3连通下侧低电平,开关J4连通上侧输出控制信号,双向DC-DC变换器仍工作在Buck状态;当直流微电网运行于层区3时,开关J1、J2仍连通上侧,采用MPPT控制,开关J3连通上侧输出控制信号,开关J4连通下侧低电平,双向DC-DC变换器工作在Boost状态。容量检测模块通过检测蓄电池电荷量,当电荷量超过设定值上限时,通过增加负载使蓄电池放电;当电荷量低于设定值下限时,通过减小负载使蓄电池充电。
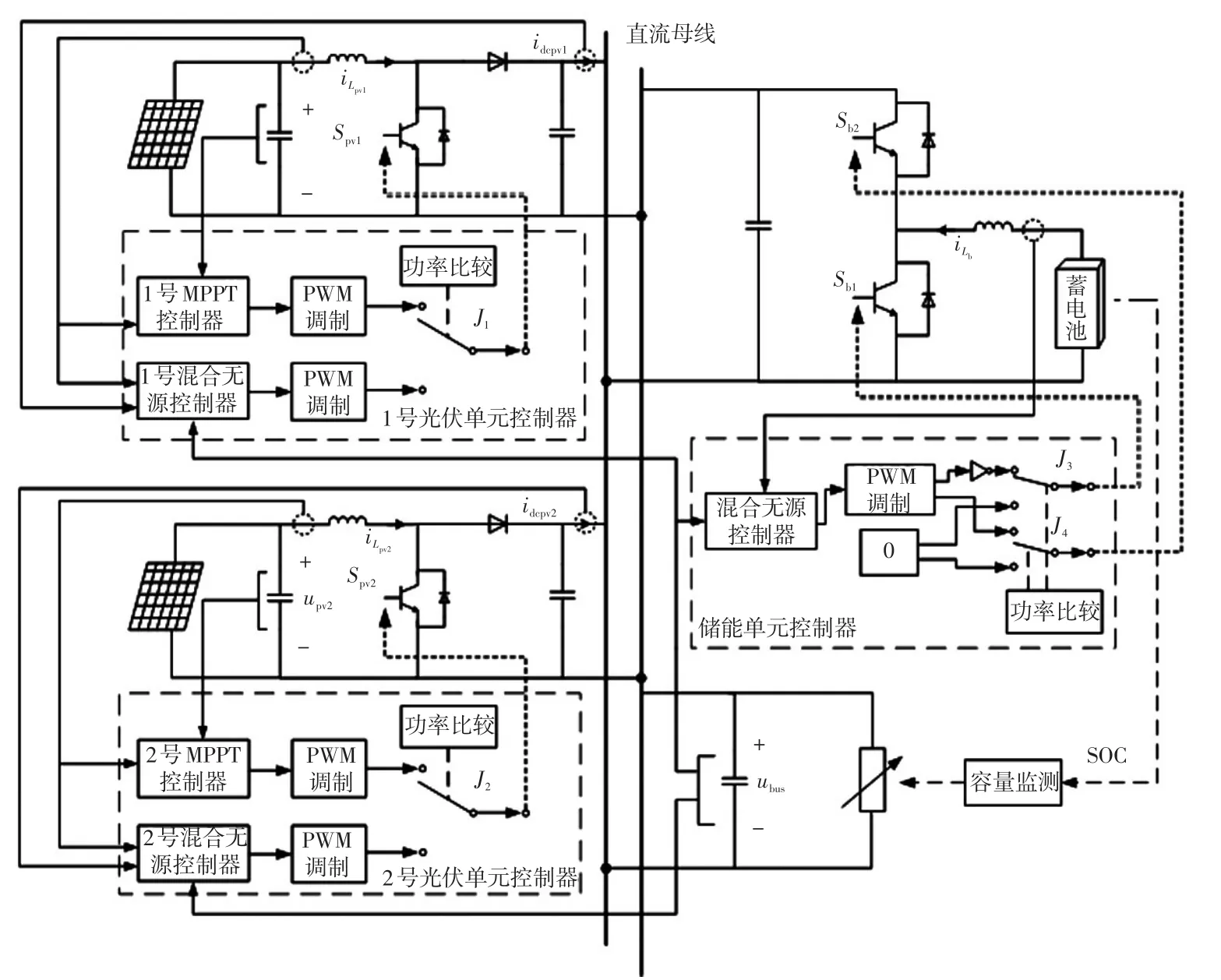
图7 直流微电网控制总框图Fig.7 Overall control block diagram of DC microgrid
4 仿真研究
4.1 参数选择
依据图7直流微电网控制框图,利用Matlab/Simulink中的电力电子模块搭建直流微电网仿真模型,系统主要参数如表1所示。
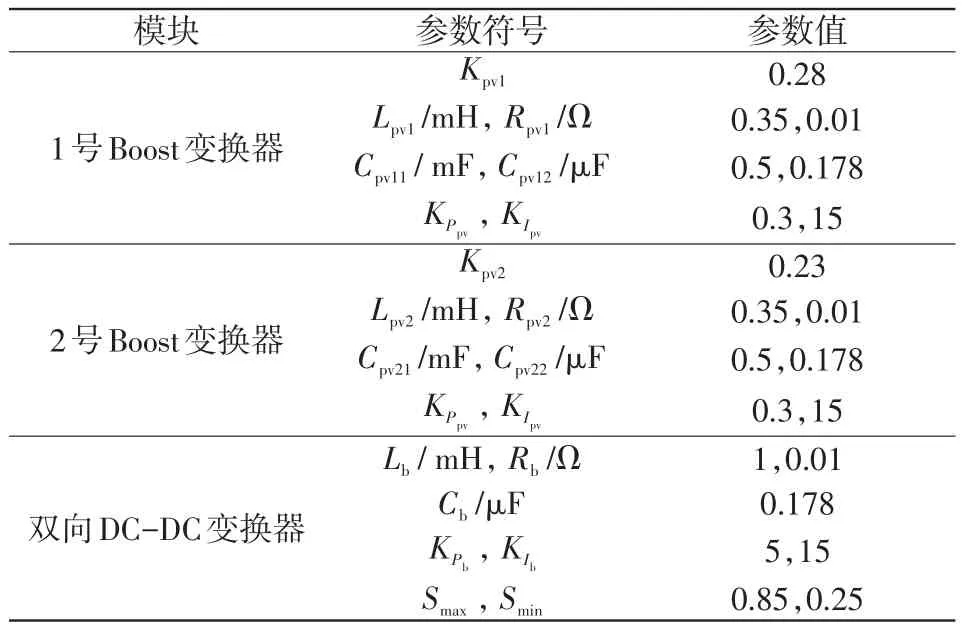
表1 系统参数Tab.1 System parameters
表1中:Cpv11和Cpv12分别为1号光伏单元中光伏电池侧和直流母线侧的电容值;Cpv21和Cpv22为2号光伏单元中相应侧电容值。设定负载额定功率为5 kW,在1、2、3层区运行时负载功率分别为1.15 kW、5 kW和15 kW,两组光伏单元工作在MPPT模式下共输出功率10 kW。
4.2 仿真结果
为研究系统稳态性能,对不同控制层区运行时分别进行仿真测试,得到系统各参数波形变化如图8、图9、图10所示。
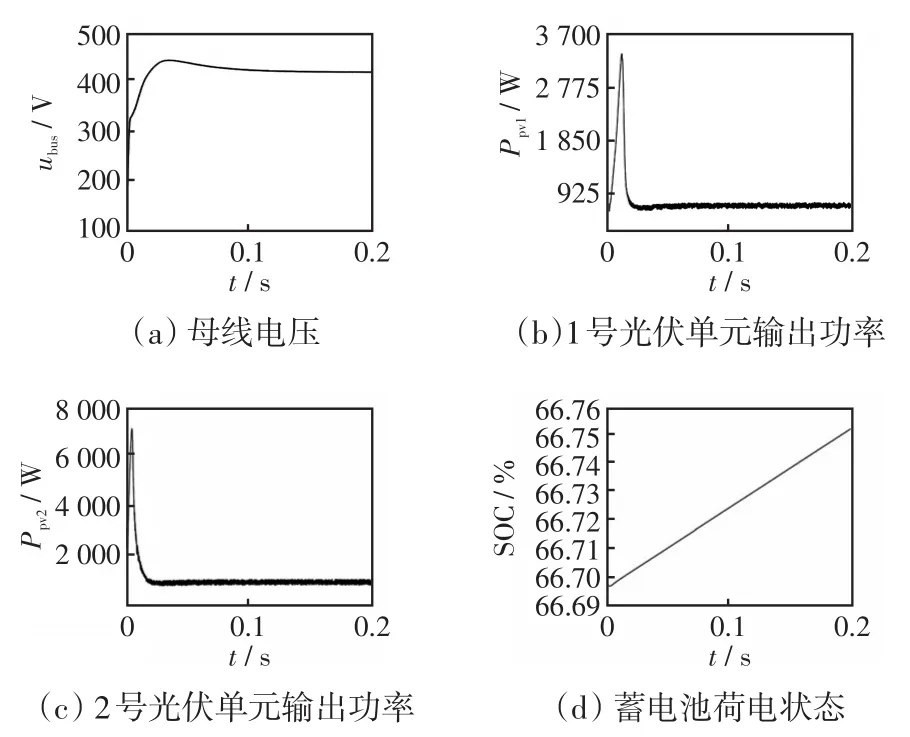
图8 层区1运行下系统各参数波形Fig.8 Waveforms of system parameters under operation in layer 1
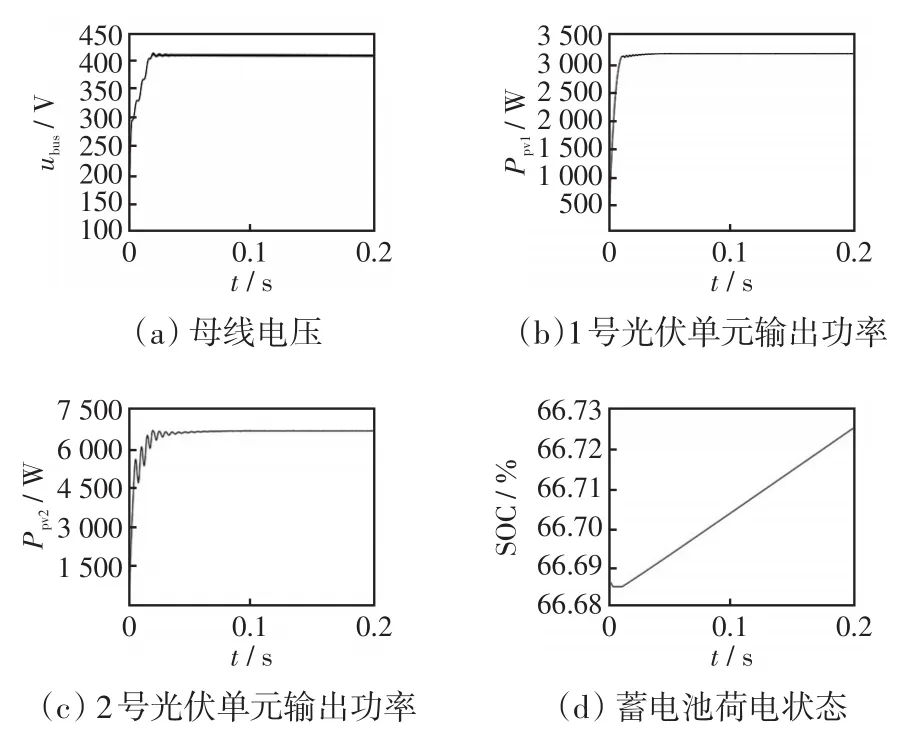
图9 层区2运行下系统各参数波形Fig.9 Waveforms of system parameters under operation in layer 2
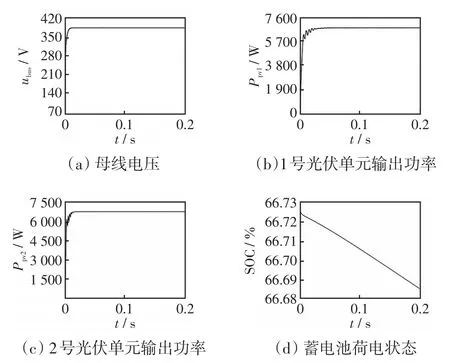
图10 层区3运行下系统各参数波形Fig.10 Waveforms of system parameters under operation in layer 3
从图8可以看出,层区1运行时该控制策略能够快速使母线电压稳定在415 V,且光伏单元输出功率平衡,均在740 W左右。负载功率增加后,由图9、图10可见,母线电压能够较快稳定在期望范围内,且双向DC-DC变换器能够根据负载功率变化对储能装置进行充放电。系统稳态工作点参数如表2所示,其中,PR为负载功率。
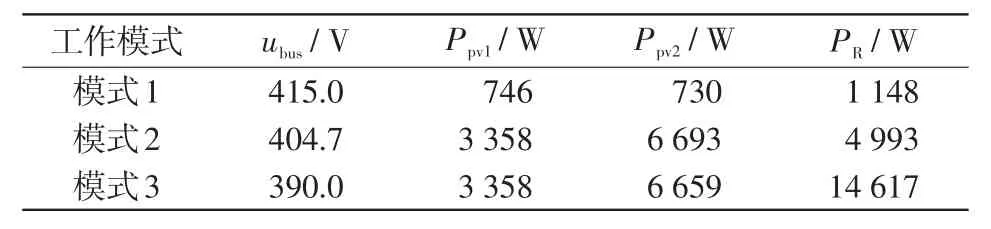
表2 系统稳态工作点参数Tab.2 Steady-state operating point parameters of system
负载功率为1.15 kW时,系统稳定运行在层区1;在0.25 s突加负载至5 kW,系统切换至层区2运行,光伏单元由混合无源控制变为MPPT控制。由图11可见,母线电压波动较小,快速稳定在层区2电压工作范围内,光伏单元输出功率逐渐上升到最大值。
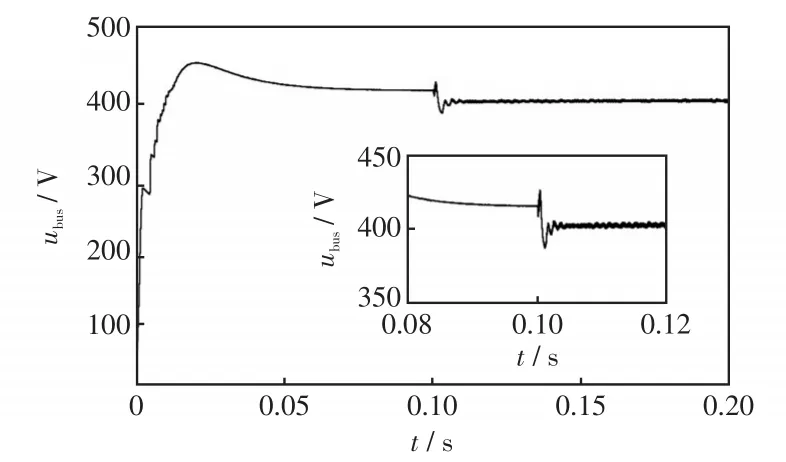
图11 层区1切换至层区2时母线电压变化Fig.11 Changes in bus voltage when layer 1 is switched to layer 2
负载功率为5 kW时,系统稳定运行在层区2;当蓄电池电荷量超过0.85时,将负载增加至15 kW,系统切换至层区3运行,光伏单元保持MPPT控制不变,储能单元由充电状态转变为放电状态。由图12可见,母线电压能够快速稳定。蓄电池电荷量变化如图13所示。综上分析,该控制策略能够保证系统具有较好的稳定性,且具有较高的控制精度,在负载功率发生突变时,能够快速切换相应的控制方式,系统具有较好的动态性能和鲁棒性。
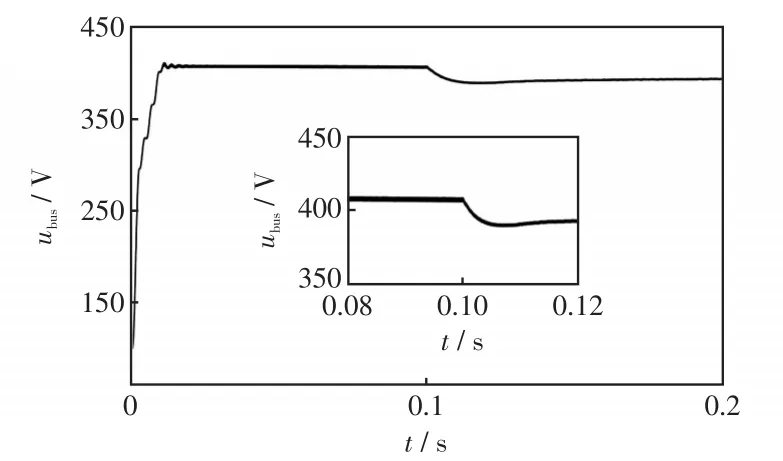
图12 层区2切换至层区3时母线电压变化Fig.12 Changes in bus voltage when layer 2 is switched to layer 3

图13 层区2切换至层区3时蓄电池电荷量变化Fig.13 Changes in battery charge when layer 2 is switched to layer 3
5 结语
针对多变换器直流微电网系统控制,采取了将混合无源控制与母线电压分层控制策略相结合,在负载功率突变时能够采取恰当的控制方式保证系统稳定运行。仿真结果表明,该控制策略具有较好的控制性能。该控制策略设计过程简捷,适用于常规结构的直流微电网,当直流微电网拓扑更为复杂或具有特殊控制要求时,仍需结合通信控制以及其他非线性控制策略,这也是需要进一步研究的内容。
猜你喜欢
电子制作(2019年12期)2019-07-16
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
北京航空航天大学学报(2017年6期)2017-11-23
互联网天地(2016年2期)2016-05-04
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年13期)2015-04-09
电测与仪表(2015年5期)2015-04-09