基于窄带物联网的跌倒判定系统设计与实现
2021-07-03 05:38:52陆世尧于子龙
南京开放大学学报 2021年2期
陆世尧,于子龙
(南京城市职业学院,江苏 南京 211200)
据民政部相关数据显示,截至2020年底我国60岁及以上人口达2.553亿,占总人口的18.1%,人口老龄化趋势明显。同时,人们对于老年人健康的关注度日益提高,尤其是子女外出工作缺乏照顾的老人。如何有效提供科学的养老服务成为当下的问题焦点,同时子女对于老人的健康监护需求也越来越迫切。另外,有研究发现,跌倒已成为65岁以上老年人口因伤致死的首位原因。大量数据统计和分析也反映出老人跌倒发生率较高,且后果非常严重。老人跌倒不仅会造成其机体的严重损伤,还会给家庭带来精神创伤和经济负担。随着科技的不断创新和发展,可以通过一些跌倒检测设备有效检测出跌倒事件,及时对老年人采取一些救助措施,从而有效避免危险事件的发生。但是市场现有的跌倒报警设备,通常使用陀螺仪或者重力感应器进行跌倒判定。这种跌倒判定对于算法的依赖程度高,经常有误报或漏报发生。即便能够检测出跌倒行为,也无法满足用户对于跌倒判定精准的要求,从而导致用户体验较差。而且多数跌倒报警设备采用传统的GSM通讯方式,由于GSM网络的实时连接性要求高,导致了网络流量开销大、能源损耗多,由此带来通信成本较高和续航能力较短等问题。
因此,改善现有市场产品的不足显得尤为重要。首先,由于物联网技术及电子传感器技术的不断升级发展,5G网络的全面部署,我们可以采用成熟的NB-IoT(窄带物联网)通信技术和经典SVM跌倒算法,再以气压及心率趋势变化为辅助判断条件,多维度地建立老人的跌倒判定模型,进而用于多场景多角度的跌倒判定。其次,通过优化执行算法进一步提高跌倒判定精度,从而实现用户对跌倒判定的需求及期望,达到不漏报、不误报的效果。最后,NB-IoT(窄带物联网)通信方式还大大改善了设备的能耗问题,尤其是电量和流量的损耗。
一、跌倒判定系统可行性分析
(一)跌倒方式分析
在实际生活中,跌倒的方式要复杂很多,比如行进中跌倒、昏迷跌倒、滑倒、起身跌倒等。每种跌倒方式主要有三个明显行为特征:人体从站立到卧倒产生较大的高度差,人体运动加速度的变化幅度陡增,以及跌倒后的心率异常。与此同时,跌倒行为中仍然存在“假性跌倒”或者轻微性跌倒状况,其特征在于甩动手臂等大幅度动作或者轻微跌倒后可自行站立,并未对身体造成影响。
(二)跌倒模型分析
由于实际跌倒过程中可能会面临各种意外,系统模型以如下假设建立基础坐标系:首先,佩戴者身体躯干部位的重心加速度与腰部保持一致;其次,跌倒时产生的高度差通过手腕产生垂直方向的位移表现,而“假性跌倒”的特征在于心率波动小且一段时间内会伴有垂直方向的上升趋势。此外还需报警装置在手腕处佩戴完好,没有发生松动脱落等。
二、跌倒判定系统设计
(一)整体架构设计
跌倒判定系统的构成主要包括NB-IoT通讯模块、传感器模块、处理器模块以及供电模块。传感器模块包括九轴姿态传感器(MPU9250)、高精度气压传感器(BMP390)以及心率监测传感器(MAX30102)。九轴姿态传感器(MPU9250)的主要功能是负责实时采集佩戴者关于正前方、垂直方和侧方为轴的加速度和角速度,采用双重阈值(阈值1:合成加速度阈值;阈值2:合成角速度阈值)算法来监测老人是否为跌倒状态。高精度气压传感器(BMP390)的主要功能是负责监测当前的气压值。心率传感器的主要功能是负责监测佩戴者的心率。处理器模块负责获取传感器模块各个组件的实时数据,通过相应的算法分析和判断佩戴者的运动健康状态并决定是否向终端发起报警提示。NB-IoT通讯模块则是通过一定的协议与服务器进行数据传输。供电模块负责供给整个系统电力。
(二)硬件结构设计
跌倒判定系统具体的硬件结构设计如图1所示。该结构主要由传感器模块、处理器模块、NB-IoT通讯模块和电源模块组成。
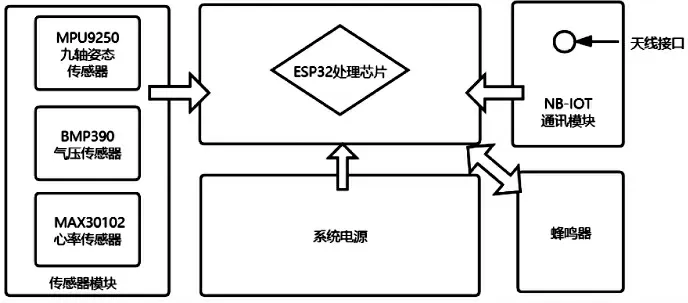
图1 跌倒判定系统硬件结构设计
九轴姿态传感器是一种新型姿态传感器,它由三轴陀螺仪、三轴加速度计和三轴地磁计以及动态运动处理器(DMP)构成,在无人机上应用广泛。九轴姿态传感器可以通过集成电路总线(IIC)接口和单片机进行数据交互,传输速率可达400 kHz/s。其对于角速度的检测范围最高可达±2000(°/s),加速度的检测范围最大可达±16g(g 为重力加速度),磁感应强度的检测范围最高可达±4800μT,有良好的人体姿态数据获取能力。
气压传感器是基于Bosch成熟的压阻式压力传感器技术,具备高确度和线性度的特性和很高的EMC稳健性,在手机、定位器和手表等电池供电型设备中使用广泛。气压传感器可以通过集成电路总线(IIC)接口和串行外设(SPI)接口进行数据交互,其典型相对精度为±0.03 hPa,典型的绝对精度为±0.5 hPa,进行补偿后可达到高精度的气压测量,能够监测10cm以下的高度变化。平均测量时间5 ms,具备较高的测量灵敏度,可对气压波动进行快速捕捉。
心率传感器主要集成了心率监测仪和脉搏血氧仪,包括一个红外光的LED、光器件、光电检测和含有抑制环境光的低噪声电子电路,以检测脉搏血氧饱和度和心率信号,并额外集成玻璃盖以有效排除外界和内部光干扰,提高工作性能,在健身辅助设备和医疗监控装置等领域应用广泛。用户只需要通过相关的数字接口,就可以获取经过转换的光强度数值,再调用相应的算法就可以计算出心率值。
NB-IoT通讯模块是基于蜂窝的窄带物联网,模块组件主要包含通讯模组、SIM卡槽、UART接口、IPEX天线接口。NB-IoT通讯模块支持板载天线,降低设计外接天线的成本。其内置SIM卡,拥有更小的体积和强大的稳定性。它还采用CoAP 和TCP/UDP协议进行网络通讯,应用平台广泛,支持对接各类云服务以及移动卡应用,因此NB-IoT技术在移动物联网中呈现出迅猛的发展势头。
三、跌倒姿态探测及判断算法
(一)人体姿态探测方法
以人体方位作为测量基准:冠状面向前为X轴正方向,矢状面向左为Y轴正方向,水平面向上为Z轴正方向建立人体坐标系。利用九轴姿态传感器(MPU9250)能够测量出三轴方向上的加速度ax、ay、az和角速度ωx、ωy、ωz(如图2所示)。
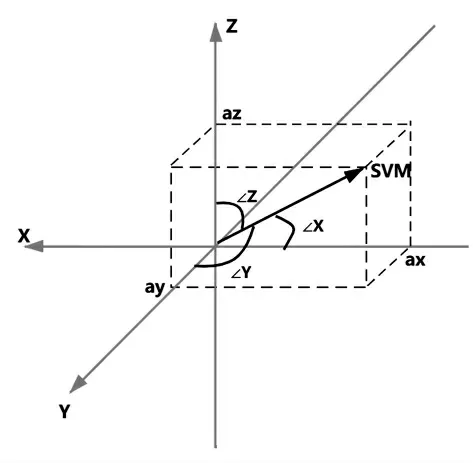
图2 SVM坐标示意图
人体的加速度向量幅值SVM(signal vector magnitude)可以辨识人体的运动状态。人体的运动状态越剧烈则数值越大,针对如行走或站立等SVM数值较小的运动状态则可直接过滤掉。ax、ay、az是矢量SVM在X、Y、Z上的投影,三轴合成加速度可表示为:

同样的,在人体运动过程中合成角速度的数值大小可以用作衡量合成加速度与三轴夹角变化的快慢。若仅通过合成加速度SVM作为人体运动状态的判断,仍存有较大的误差,而合成角速度则可以作为状态判断的辅助参数之一。合成角速度可表示为:

人体跌倒是一个持续的过程,SVM和ω若仅针对某一时刻或某段时间内的均值来与阈值比对显然不够精确。为减小跌倒判定误差,可以引入人体变化高度作为新的判定参数,通过三者的综合判断计算出是否出现跌倒行为。这里的人体变化高度可以通过海拔高度的差值进行计算,BMP390气压传感器监测到的气压转换成海拔高度的公式可以表示为:

配合传感器的气压值和温度补偿值可以较准确地得出海拔高度。公式中H表示海拔高度(单位m),p是所处位置的大气压强(单位pa),p0是标准大气压值。
(二)跌倒判定算法
传统跌倒算法虽然对跌倒过程有较为深入的分析解释,但对于与跌倒相似的运动状态和跌倒的危险程度的判断仍有较大的优化空间。具体来说可通过如下三个阶段进行跌倒算法的分析:
第一阶段,以运动产生的合成加速度和合成角速度作为状态的判断依据,通过其数值波动的大小来分辨当前人体的运动状态是非剧烈状态还是剧烈状态。微控制器实时获取传感器模块内九轴姿态传感器对于加速度和角速度的监测值,并利用人体加速度向量幅值计算公式分别计算出合成加速度与合成角速度。当人体出现跌倒动作时,二者的数值会出现明显的陡增迹象,通常加速度会超过3g(g为重力加速度),角速度会超过400°/s,且有一个较长的持续时间,因此设计系统的采样率为150Hz,则当连续6个采样点中合成加速度和合成角速度皆超过额定阈值,则判定佩戴者处于剧烈运动状态。
第二阶段,对剧烈运动状态是否属于跌倒做出判定。作为跌倒动作的明显特征之一是人体的高度发生了较大改变,高精度气压传感器BMP390具有较高的灵敏度,可以测量10cm以下的高度变化,这里用它捕捉人体跌倒时产生的高度变化。微控制器通过气压传感器BMP390获得监测到的气压值,首先记录第一阶段判断为剧烈运动时的第一个采样点和最后一个采样点的高度值,再计算出人体运动过程中的高度差,若高度差超过50cm,则判定佩戴者处于跌倒状态。传感器性能测试数据如表1:
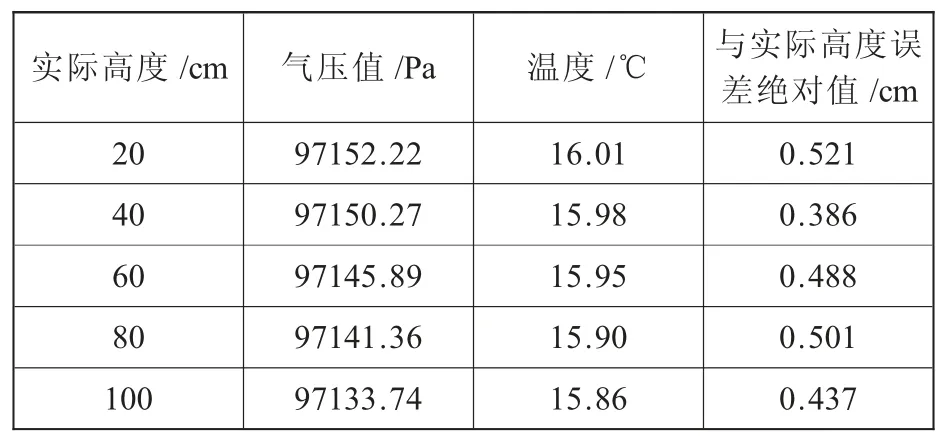
表1 传感器性能测试数据
大量实验表明,跌倒行为中仍存在“假性跌倒”或者轻微性跌倒状况,这是造成跌倒误判的重要原因之一。
第三阶段,针对此类情形的规限条件,通过实验数据抽取严重跌倒时的行为特征,包括跌倒后段时间内心率的异常波动和段时间内的行为静止等,对报警条件加以约束。具体体现为:从跌倒判定开始的5s内微控制器实时获取并统计心率传感器监测的心率变化、高精度气压传感器以及九轴姿态传感器的动作数据,若心率维持平稳并且有明显的起身向上动作时则自动取消跌倒模式,否则进入“严重跌倒”状态并开始蜂鸣报警。心率平稳的具体表现为5s内心率峰值和谷值之间的差值低于40次/s,而有明显的起身向上动作则表现为5s内气压传感器获取的高度值上升30cm。具体测算过程如图3。
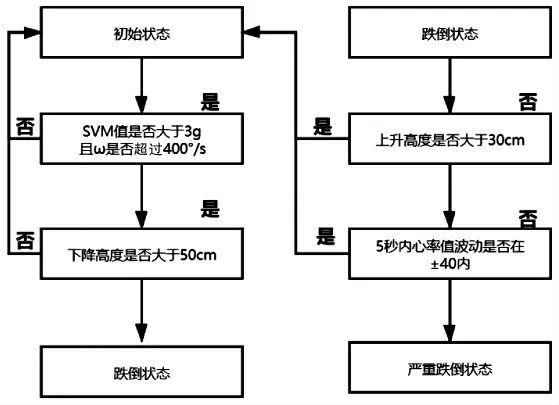
图3 软件系统测算图
(三)模拟采样及实验数据分析
首先,我们对测试人员的活动情况进行了多次模拟采样,得到了表2的数据实验结果。结果表明,正常活动的识别准确率能够达到100%。再通过数据的对比可以看出,就日常的跌倒动作判定而言,本系统具备优秀的判定能力,可以准确区分出常规动作和跌倒动作间的差异。
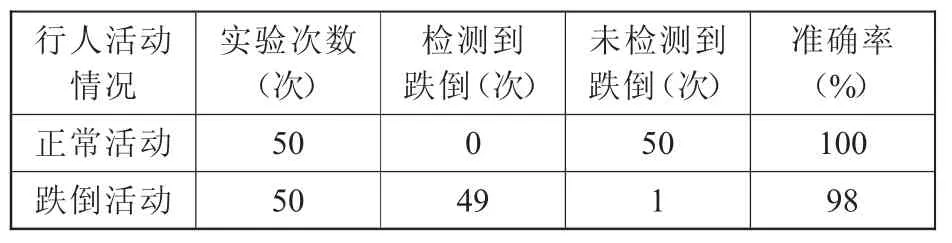
表2 实际跌倒测试数据
其次,在测试过程中,以站立状态建立人体坐标系,各阶段的空间位置变化是判定的重要因素。从表3的纵向数据对比当中我们可以看出,当跳跃、下蹲、挥臂等运动发生时,基础坐标系中的各个节点的空间位置发生了较大的波动,结合正常跌倒对比分析,“挥臂跑步”的动作具有极高的辨识率,且极少会出现误报的现象。而部分“跳跃行进”“下蹲动作”由于与跌倒特征的相似性较高,虽然会出现误报现象,但是准确率仍维持在较高水平。针对3种假性跌倒动作的识别准确率都在94%以上,可以认为本系统能够准确区分出假性跌倒和正常跌倒间的动作差异,有效避免了大部分非危险情况下的报警行为。
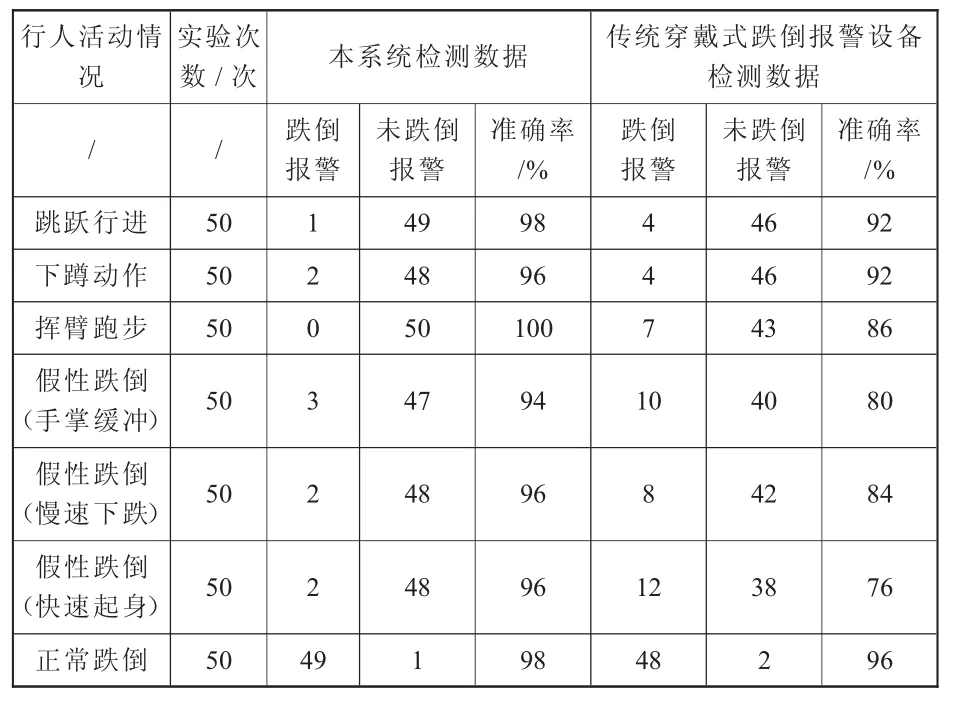
表3 跌倒测试对比数据
通过横向数据对比可以看出,本系统的各项测试数据的准确率均高于传统穿戴式跌倒报警设备。虽然在正常跌倒的对照组中,各行为间的准确率差异不够明显,但本系统在复杂动作和假性跌倒方面的检测有着明显优势。尤其是在假性跌倒(快速起身)这一对照组中,准确率高于传统穿戴式跌倒报警设备20%,此外在假性跌倒(手掌缓冲)、假性跌倒(慢速下跌)的对照组中准确率也均高于10%以上。由此可见,针对假性跌倒现象,本系统具备优秀的检测识别能力和判断跌倒危险程度再确定是否报警的功能。而在跳跃、下蹲、挥臂等对照组,通过采取的分段式多重判断方法,对比传统穿戴式跌倒报警设备的准确率也有小幅度的提升。综上所述,本系统的跌倒检测水平明显优于传统穿戴式跌倒报警设备。
四、结束语
本文通过分析各种跌倒方式并抽取行为特征,再根据监测人体运动姿态数据的变化,提出优化跌倒判定的构想。依据跌倒发生的三类特征,设计采用三轴合成加速度SVM和三轴合成角速度ω以及跌倒时产生的下降高度进行阈值比对来判定区分日常活动和跌倒状态,再通过时间段内上升高度和心率值变化进行危险程度划分,最终判定是否需要发送跌倒报警信号且基于NB-IoT通信与定位的方式也取得不俗表现。最后结合终端接收报警提醒,可以第一时间让家人知晓,并采取针对性有效措施,赢得宝贵救护时间。通过跌倒判定系统衍生的手环终端产品,小巧便捷,功能强大,可拓展性强,作为便携式智能产品,非常适合老年人穿戴,具有良好的发展和应用前景。
猜你喜欢
中国临床医学影像杂志(2022年6期)2022-07-26 07:17:26
幼儿画刊(2021年5期)2021-12-02 04:24:04
成都医学院学报(2021年2期)2021-07-19 08:35:20
模具制造(2019年4期)2019-06-24 03:36:46
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
西南军医(2016年3期)2016-01-23 02:17:49
中国医学影像学杂志(2015年9期)2015-12-15 11:03:28
中国铁道科学(2015年4期)2015-06-21 06:46:06
浙江大学学报(工学版)(2015年7期)2015-03-01 01:18:55