基于深度学习的电力设备红外图像识别
2021-06-30 03:47秦伦明
上海电力大学学报 2021年3期
陈 鹏, 秦伦明
(上海电力大学 电子与信息工程学院, 上海 200090)
随着计算机视觉和电力巡检机器人的快速发展,巡检机器人和计算机视觉技术相结合在智能电网中的应用需求越来越多。近年来,红外热成像仪搭载在电力巡检机器人、无人机等检测平台上对电力设备进行智能巡检,减少了运维人员采集电力设备红外图像的工作量。但在巡检机器人和无人机拍摄电力设备的过程中,由于拍摄角度和拍摄距离的因素,在图像上显示的尺寸较小且目标模糊[1]。传统的图像分割识别方法,由于其二值化阈值的选取存在较多人为干扰因素,对拍摄角度距离差异、光照影响和复杂背景干扰较为敏感,很难对红外图像中的电力设备进行有效识别[2]。随着深度学习的迅速发展以及硬件水平的提高,深度卷积神经网络在计算机视觉领域取得了巨大的成功,为深度学习在电力设备识别和定位中的应用奠定了基础[3]。
深度学习可以处理大规模的文本和图像等数据[4]。现代的图像识别将深度学习应用其中,通过提取并学习识别物体的特征来适应复杂的环境,减少了外界因素对物体识别的影响,提高了图像识别的准确性。图像处理算法改进过程中会出现各种数据集,如ImageNet训练集、VOC(Visual Object Classes)数据集和人脸检测数据集(Face Detection Data Set and Benchmark,FDDB)等。这些数据集数量很大,种类很多,在训练过程中可以在很大程度上解决过拟合问题[5]。
1 深度学习的网络模型
基于深度学习的网络模型主要分为以R-CNN系列[6-8]为代表的two-stage模型,以及以YOLO系列[9]和SSD[10]为代表的one-stage模型。
1.1 RCNN系列模型
卷积神经网络从最初的CNN(Convolutional Neural Networks)开始,由R-CNN,Fast R-CNN逐渐发展为Faster R-CNN。
R-CNN的识别分为3个步骤:首先,得到多个候选区域并缩放到统一大小;其次,使用CNN分别对每个候选区域进行特征提取;最后,通过支持向量机(Support Vector Machine,SVM)对提取到的特征向量进行分类。R-CNN在提取候选区域使用选择性搜索算法,由于对提取的候选框都需要进行CNN操作,因此增加了计算量,使得相应的训练步骤十分繁杂,训练耗时长,且每一步要进行数据的保存,也需要较大的空间。
Fast R-CNN在取代SVM的基础上,加入了边框回归,解决了R-CNN的空间开销,提高了测试速度。但是Fast R-CNN在提取候选区域依然使用的是选择性搜索算法。由于该算法运行速度较慢,因此不能做到实时检测。
Faster R-CNN在提取候选区域时,采用区域生成网络(Region Proposal Network,RPN)[11]来取代选择性搜索算法。RPN采用滑动窗口,通过以窗口为中心,不断创建出不同大小的中心框,然后映射到原图片上,形成候选区。RPN可以批量生成候选区域,解决了候选框批量生成时间太长的问题。与OLO(Only Look Once)和SSD(Single Shot multiBox Detector)算法相比,RPN精度高,但速度慢。因此,Faster R-CNN将网络结构分为2部分:第一部分用于生成候选区域的RPN;第二部分用于对候选区域中的目标进行识别。2部分共享权值从而提高了训练的效率。Faster R-CNN的网络结构如图1所示。

图1 Faster RCNN的网络结构
1.2 YOLO系列模型
YOLO系列模型逐渐从YOLOv1,YOLOv2发展到YOLOv3。
YOLOv1进行了20多次卷积、4次最大池化,其中3×3卷积用于提取特征,1×1卷积用于压缩特征,最后将图像压缩到7×7×30的大小,相当于将整个图像划分为7×7的网格,每个网格负责自己区域的目标检测。
YOLOv2使用了一个新的分类网络作为特征提取部分,网络使用了较多的3×3卷积核,在每一次池化操作后使通道数翻倍。借鉴network in network思想,将1×1卷积核置于3×3卷积核之间来压缩特征。使用批归一化(Batch Normalization)稳定模型训练,加速收敛,正则化模型。除此之外,YOLOv2借鉴了 R-CNN 系列中锚框的理念,引入了先验框。
YOLOv3改进较大,主要体现在3个方面:采用多特征层进行目标检测,一共提取3个特征层,分别为(13,13,75),(26,26,75),(52,52,75);采用反卷积UmSampling2d设计,可以更多更好地提取出特征;使用了容易优化的残差网络(Residual Network),能够通过增加深度来提高准确率。其内部的残差块使用了跳跃连接,缓解了在深度神经网络中因深度增加而带来的梯度消失问题。
1.3 SSD模型
SSD使用了不同层次与尺度的特征图进行检测:大尺度特征图保留了较多的空间位置信息,可以用来检测小物体;小尺度特征图具有更为丰富的语义信息,可以用来检测大物体。SSD使用VGG-16(Visual Geometry Group Network 16)作为主干网络,并且将VGG-16最后的2个全连接层替换成卷积核大小为3×3和1×1的卷积层,同时采用空洞卷积扩张卷积视野,然后移除分类层并增加一系列卷积层用于检测。
综上所述,在特征提取方面,Faster R-CNN模型采用共享卷积层提取特征,由于卷积层层数较深,可提取更多的目标特征,对小目标也具有较高的识别精度。YOLO系列和SSD模型虽然在速度上略胜一筹,但识别准确率相对较低。因此,本文采用Faster R-CNN模型进行电力设备红外图像识别。
2 Faster RCNN模型预测过程
Faster R-CNN模型预测过程主要分为以下3部分。
(1) 特征提取 搭建Faster R-CNN卷积神经网络模型,由卷积和池化组成的共享卷积层对各幅图像提取目标特征。
(2) 候选区域生成 提取的特征图像通过RPN网络,将前景和背景各生成9个不同尺寸的候选框,用非极大值抑制算法微调候选框位置和尺寸,批量生成候选框。RPN的核心思想是使用CNN直接产生候选框。具体操作是在CNN卷积层后加滑动窗口以及2个卷积层完成候选区域提取。第一个卷积层将特征图每个滑动窗口位置编码成一个特征向量,使用一个小网络在最后卷积层得到的特征图中进行滑动操作,即通过卷积操作得到H×W个256维特征向量。 第二个卷积层对应2个全连接层,对H×W个256维特征向量进行2次全连接操作,即可得到RPN的输出:2k个分数以及4k个坐标。2k个分数是指候选框中物体是前景的概率以及是背景的概率,4k个坐标是指候选框相较于原图的偏移[11]。RPN结构如图2所示。

图2 RPN结构
(3) 分类与回归 采用全连接层处理各个候选区域图片。使用 Softmax分类器对候选区域进行分类识别,并使用回归器对候选区域向量进行处理,将候选区域优化为一个候选框,从而得到目标位置信息。
Faster R-CNN模型整体的执行流程如图3所示。
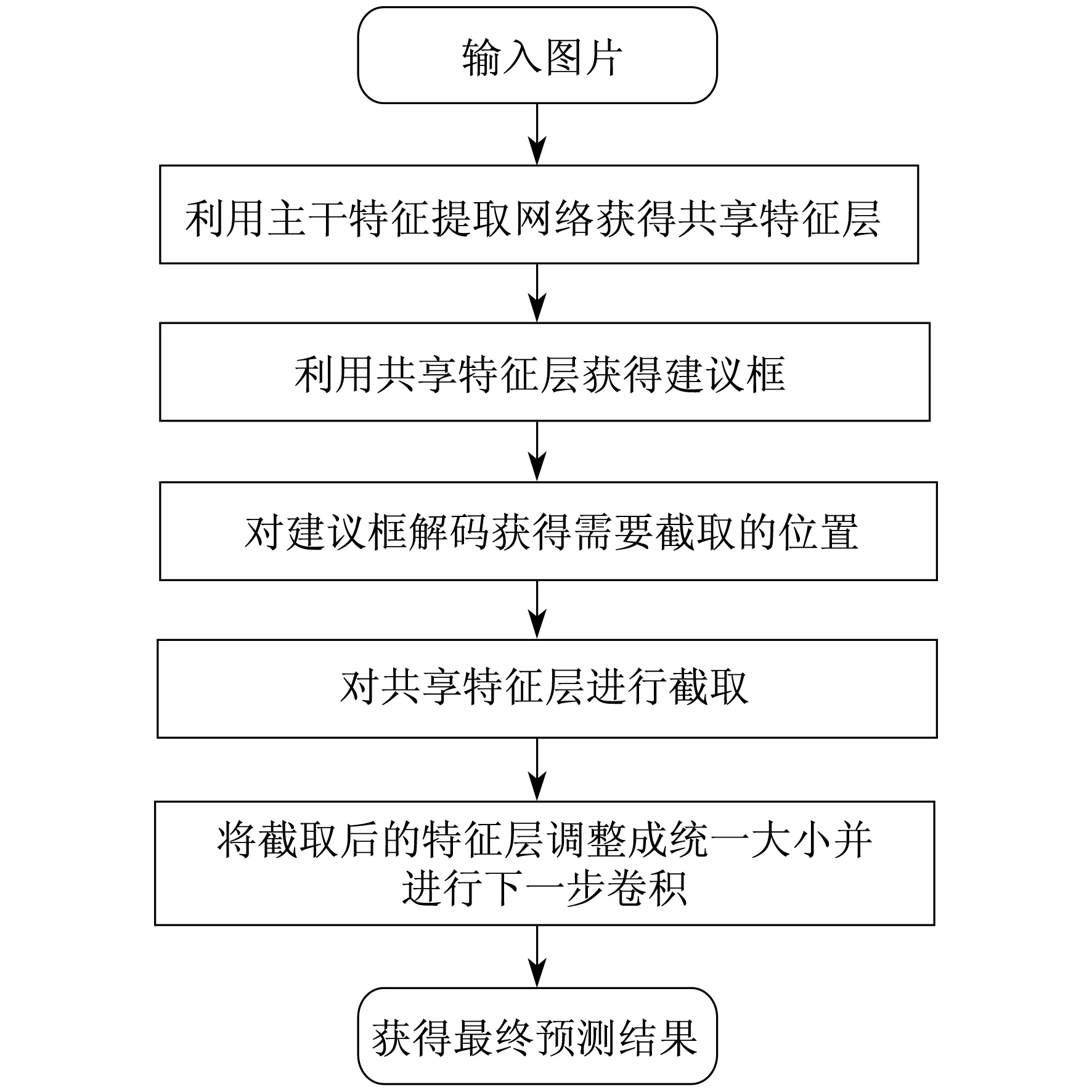
图3 Faster RCNN模型的执行流程
3 基于深度学习的电力设备红外图像识别
3.1 数据集
本文采用的数据集为各地变电站和多个高压实验室的电力设备红外图像。数据集的制作过程为:首先对最初始的红外图片进行重命名、图片格式转化和图片尺寸变换;然后利用图像标注软件对原始红外图片中的电力设备进行标注。创建完成后的电力设备红外图像检测数据库一共包含300张电力设备红外图像,标注出4类电力设备。将所有红外图片的90%作为训练集,10%作为测试集。
3.2 环境搭建
操作系统为Windows 10,运行内存16 G。在操作系统上安装Anaconda3,Visual Studio2015和TensorFlow1.3.0,以Python为编程语言。利用VGG-16网络结构对电力设备红外图像检测数据库重新进行训练,将训练后得到的新VGG-16网络结构嵌入到Faster R-CNN模型中,使用电力设备红外图像检测数据库中的测试图片进行测试,并观察实验结果。
3.3 结果分析
本文对YOLOv3,SSD和Faster R-CNN模型在测试集上进行了对比试验,评价指标为识别准确率和测试速度,不同方法电力设备识别结果如表1所示。
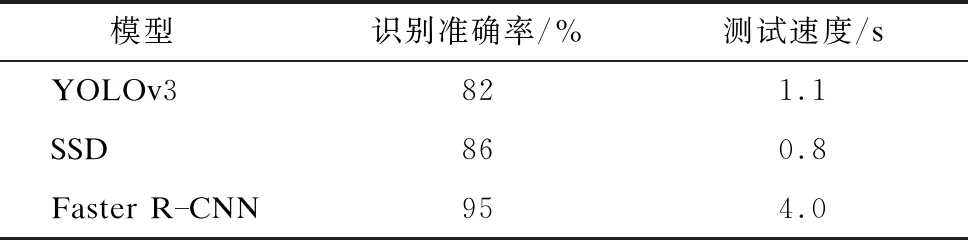
表1 不同方法电力设备识别结果
从表1可以看出,针对电力设备的识别,YOLOv3和SSD为代表的one-stage模型识别准确率分别为82%和86%,测试速度分别为1.1 s和0.8 s;以Faster R-CNN为代表的two-stage模型识别准确率为95%,测试速度为4.0 s。这说明Faster R-CNN模型在特征提取方面可以提取到更多有用特征,对目标识别准确率高。YOLOv3和SSD模型虽然对目标的识别准确率不高,但测试速度远远高于Faster R-CNN模型。
3.4 效果展示
电力设备红外图像的识别效果如图4所示。

图4 电力设备红外图像的识别效果
4 结 语
本文针对目前的电力设备红外图像识别准确率不高的缺点,提出了一种基于Faster R-CNN的电力设备红外图像识别方法。结果发现,Faster R-CNN的识别准确率达到了95%,远远高于YOLOv3和SSD的识别准确率。但Faster R-CNN的检测速度慢于YOLOv3和SSD,后续可以在提升Faster R-CNN的检测速度上开展进一步研究。
猜你喜欢
环球时报(2022-05-23)2022-05-23
河北省科学院学报(2022年2期)2022-05-18
商品与质量(2021年11期)2021-11-24
金桥(2021年4期)2021-05-21
科技创新导报(2020年3期)2020-05-06
计算机技术与发展(2020年2期)2020-04-15
建材发展导向(2019年11期)2019-08-24
电子技术与软件工程(2019年4期)2019-04-26
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25