
一种合成残差式的反作用轮故障检测方法
2021-06-29 03:44:30何夏维蔡云泽严玲玲
上海交通大学学报 2021年6期
何夏维,蔡云泽,严玲玲
(1. 上海交通大学 电子信息与电气工程学院, 上海 200240; 2. 中国科学院微小卫星创新研究院, 上海 201203)
航空航天是人类史上最有意义的科学技术领域之一,是人类文明高度发展的重要标志.姿态及轨道控制分系统作为航天器高难度和高复杂度的重要组成分系统之一,直接决定了航天器任务的成败.反作用轮作为航天器重要的执行机构之一,仅需电能就可以进行姿态控制,针对不同任务和单机元器件等级可以持续工作数年至数十年.也正因反作用轮的重要程度,对于航天器而言,反作用轮的故障可能带来毁灭性的灾难.譬如“开普勒”太空望远镜上4个反作用轮报废2个,使得耗资6亿美元发现过 2 700 颗潜在系外行星的该望远镜无法继续工作[1].加拿大的Anik E1和E2卫星由于反作用轮故障直接导致TELESAT公司损失金额高达数千万美元.对于在轨航天器进行故障检测,尽早发现已经发生或即将发生的反作用轮故障,人为干预采取拯救措施,减少由于反作用轮故障引发航天器姿态失稳造成的直接或间接损失意义重大.
虽然基于卫星反作用轮故障检测的研究一直在持续进行,但能够投入到实际应用中的并不多.这是由于当前卫星的发展趋势越来越趋向于小型化和低成本化,出于成本和可靠性的考虑,星上运算及处理资源普遍较为紧张.因此,在轨很难做到耗费大量的资源来进行单机级的故障检测,一般仅进行简单的有效性判断.而地面由于卫星测控下行能力、信号干扰及地面站分布等诸多限制,在轨遥测数据包往往存在频率不一致、数据量有限及洁净度差等特点.目前,国内绝大多数卫星在发射后的长管工作中依然采用人工核查辅以简单的阈值判读,缺乏合理有效的故障检测方法.
近年来,卫星的发射任务逐渐从单星转变为星座,随着卫星研制与发射任务的不断加重,地面检测人员越来越难以从在轨遥测数据中发现故障现象及征兆,更无法在第一时间对故障进行有效的检测,使用人海战术来进行故障检测的方式必须转变.因此,研究具有实际工程意义的反作用轮故障检测方法迫在眉睫.
学者界普遍认为故障检测方法主要可以分类为三类,分别是基于解析模型、基于信号处理及基于知识的故障检测方法,最早提出这一划分方法的是该领域的权威学者Frank.在航天器反作用轮故障检测领域中,基于解析模型和基于知识的故障检测方法最为常见,近年来不断有杰出的学术成果涌现.
基于解析模型的故障检测的主流方法为观测器方法[2-3]和卡尔曼滤波器(KF)相关方法[4-7].基于解析模型的故障检测方法需要非常坚实的专业知识背景,经过严格的数学推导实现精细建模,对不同研究对象间差异敏感,通用性差,且对系统的非线性因素简化过程及预期外干扰因素都会引入误差,影响检测效果.
基于信号处理的故障检测方法一般直接利用可测信号,通过相关函数法和小波变换等技术进行分析,提取信号的故障特征进行检测.其中,小波分析的方法在航天故障检测领域中的应用最为广泛.余鑫[8]利用小波包滤噪提取信号成分,对降噪后的信号进行小波包分析来检测故障.东方红公司结合卫星遥测数据特点和小波变换多分辨率分析的特性设计了一种基于小波变换的卫星故障检测方法[9].
基于知识的故障检测方法最主要的两个研究分支为专家系统和人工智能分支,其中专家系统是航天器故障检测领域运用最早的智能诊断技术,而基于机器学习实现人工智能故障检测的方法属于新兴方向.近年来,随着相关学科的高速发展,越来越多的学者倾向于使用机器学习方法进行故障检测的研究.Baldi等[10]通过非线性几何方法(NLGA)和径向基函数神经网络(RBF NN)设计自适应估计滤波器,能够在不需要故障内部模型和先验信息的条件下进行反作用轮的故障检测.龚学兵等[11]通过历史观测数据建立了反作用轮的高斯混合模型(GMM)来进行故障检测.王嘉轶等[12]通过Elman神经网络快速检测出反作用轮故障,并将其应用到卫星群中进行邻近卫星的故障检测.Mousavi等[13]提出了一种基于分布式动态神经网络的编队飞行任务卫星反作用轮故障检测方法.王日新等[14]提出了一种基于符号动力学算法的故障检测方法,能够根据字符概率特征向量间距离实现微弱故障的检测,还针对闭环控制反作用轮非线性和多功能特性,提出了一种基于聚类和主成分分析(PCA)两步检测的故障检测方法[15].李磊等[16]利用正常数据与故障数据所产生的混沌吸引子形态不同的特征进行反作用轮故障检测.赵琳等[17]利用数学解析模型与原系统的残差训练神经网络进行反作用轮故障检测.
基于机器学习实现人工智能故障检测的方法,尤其是神经网络类方法通常需要大量的系统健康和故障样本数据进行支撑,对于样本的采集频率和正负样本均衡方面的要求很高,不充分的数据集将造成该类方法结果不准确甚至导致错误.上述故障检测方法大多停留在仿真试验阶段,为了取得高性能的检测结果对于数据样本的洁净度和采集频率要求(一般在10~100 Hz)较为苛刻,显然对于目前航天器在轨遥测能力而言,还远无法达到实际应用要求.
本文针对卫星实际在轨运行状态和遥测数据特点,设计了一种基于知识的合成残差式反作用轮故障检测方法.利用实际获取的在轨反作用轮遥测数据对极端梯度提升(XGBoost)回归模型进行训练,得到反作用轮转速的预测值,将预测值与实际测量值生成残差.研究发现,黏性摩擦因数对于摩擦力矩突变较为敏感,因此将预测黏性摩擦因数与理论值生成残差针对摩擦力矩故障进行检测,将两项残差进行合成实现地面反作用轮故障检测.本文中设计的方法基于残差原理,因此不需要故障样本数据就可以完成模型的训练,相对于神经网络方法,该方法对于数据量的需求也较小.此外,该方法可以使用不连续数据段进行模型的训练和故障的检测,适用于实际卫星在轨遥测的特点.
仿真试验结果表明,该方法针对卫星在轨实时遥测数据特点,对于闭环控制状态下的常见反作用轮故障有着较好的检测效果,对于在轨遥测数据不完备的情况鲁棒性较好,可以应用于实际地面反作用轮故障检测系统.
1 反作用轮闭环控制系统建模
基于MATLAB/Simulink软件,根据Bialke[18]的研究成果进行高精度反作用轮建模,并参照参考文献[19]中内容忽略影响较小的电机干扰项,模型框图如图1所示.图中:ke为电机电动势反馈常数;Hb为母线符号函数;Rin为输入阻抗;Ibus为卫星母线电流;Im为卫星反作用轮电机电流;ω为卫星反作用轮转速;Vbus为母线电压;Vbias为偏置电压;Vf为反向电动势;Kf为电压反馈增益;Hf为反向电动势符号函数;Tm为反作用轮的输出力矩;Vcom为输入电压指令;Gd为驱动增益;ωd为驱动频率;kt为电机转矩参数;J为反作用轮惯量;s为复变量;θa为转矩噪声角偏差;ωa为高通滤波器频率;τv为黏性摩擦因数;τc为库伦摩擦因数;sgn(·)为符号函数;ωs为反作用轮限制转速;Ks为超速循环增益;Hs为转速限制符号函数.Hb、Hf及Hs的定义分别为
(1)
(2)
(3)
其余反作用轮开环模型主要参数及其设置见表1所示.
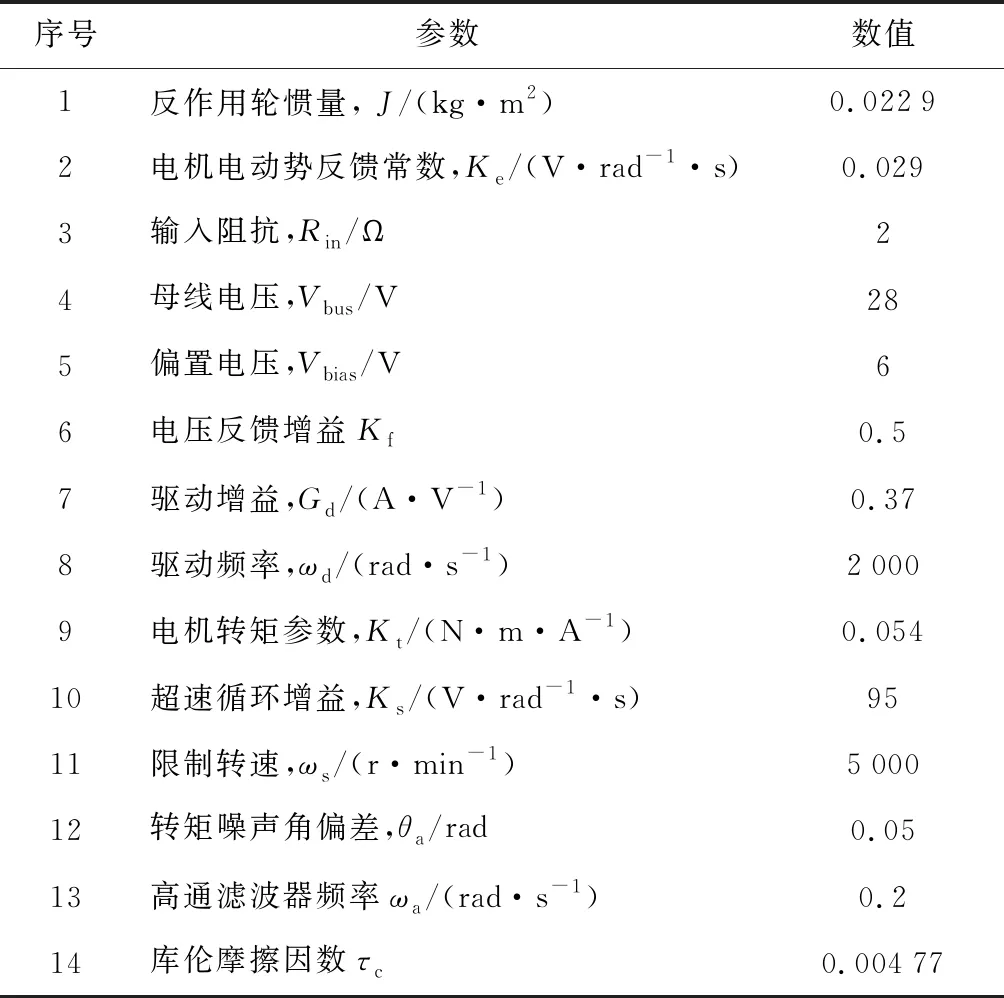
表1 反作用轮主要参数Tab.1 Main parameters of reaction wheel
为了仿真卫星实际在轨运行状态,在高精度反作用轮模型基础上,加入导引率模型、动力学模型及反作用轮控制器,如图2所示.反作用轮组安装方式

图2 反作用轮闭环控制模型框图Fig.2 Block diagram of closed-loop control model for reaction wheel
为四斜装,采用力矩控制模式,由导引率模块设置期望的卫星三轴姿态角和角速度,动力学模型主要包括轨道模型、 环境干扰力矩模型及卫星姿态动力学模型.反作用轮控制器包括比例-积分-微分(PID)控制器、反作用轮组力矩分配模块及中心转速维持模块.
其中,导引率设置卫星绕单轴进行正弦机动,幅值为20°,周期为 2 400 s,模拟在轨姿态机动状态.环境干扰力矩模型根据卫星轨道位置生成重力梯度力矩、剩磁干扰力矩、太阳光压力矩及大气扰动力矩,并将生成的环境干扰合力矩作用于卫星姿态动力学.卫星姿态动力学模型根据作用于卫星上的环境干扰力矩、反作用轮组合成角动量变化量及卫星轨道位置等输入得到卫星姿态信息.反作用轮控制器根据卫星惯量、实际三轴姿态角、角速度、期望姿态角及角速度通过PID算法解算期望的卫星控制力矩,并通过转换矩阵转换为4个反作用轮的期望控制力矩.4个反作用轮PID轮控算法参数均设置为1、100、0.001,卫星初始姿态角设置为0°、0°、0°,三轴初始角速度设置为0°/s、0°/s、0°/s.
值得注意的是,虽然本文中利用反作用轮闭环控制仿真模型获取训练数据,但是数据仅用于故障检测方法的仿真校验,检测方法本身的设计过程中并不需要进行建模,本质上是一种基于知识的检测方法,即只要具备符合输入标准的遥测数据就可以进行反作用轮故障检测,这一点与基于解析模型的故障检测方法具有很大不同,不会由于仿真模型与真实物理对象差异而导致检测效果下降.
2 常见反作用轮故障模式分析
根据文献[20]中对于反作用轮故障模式和机理的研究成果,可以将常见的反作用轮故障模式归纳为6类,分别是卡死故障、空转故障、摩擦故障、增益下降故障、缓变故障及跳变故障,故障对应的代号、模式、表现及故障原因见表2所示.
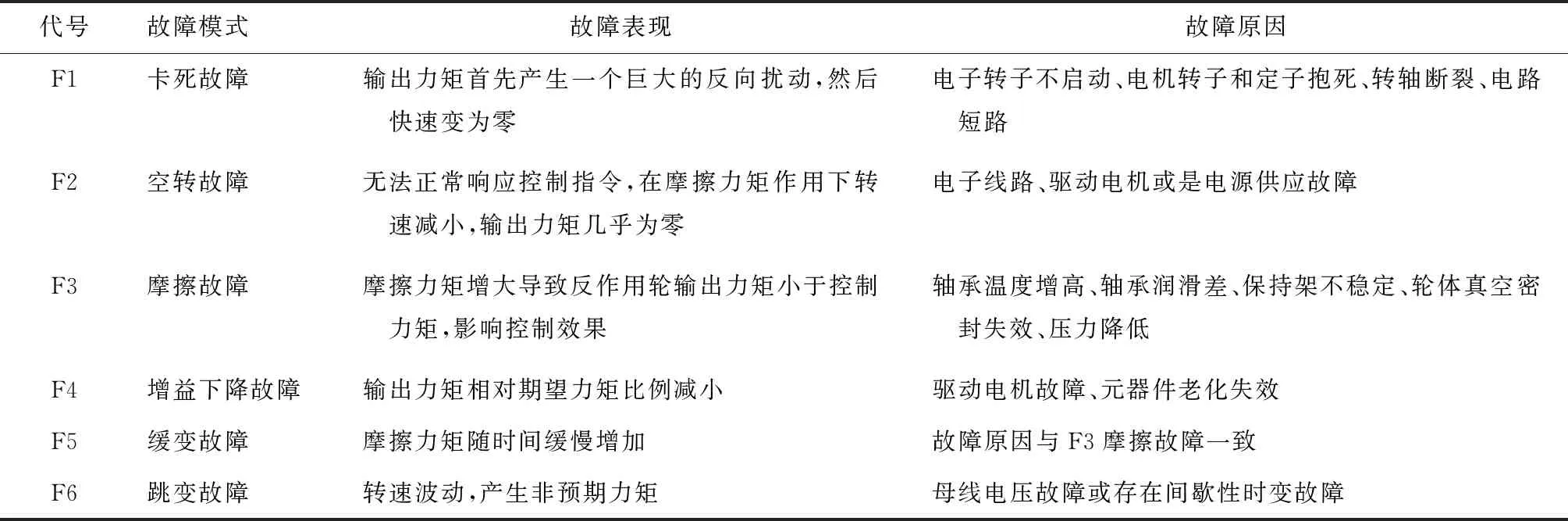
表2 常见反作用轮故障模式Tab.2 Common fault modes of reaction wheel
反作用轮卡死故障、空转故障和跳变故障会造成反作用轮转速断崖式下跌或快速异常波动,见图3所示.图中:ωF1为卡死故障下的转速;ωF2为空转故障下的转速;ωF6为跳变故障下的转速;t为星上时间.从图中可见,仅从转速遥测数据进行分析就可以实现对于故障的识别.
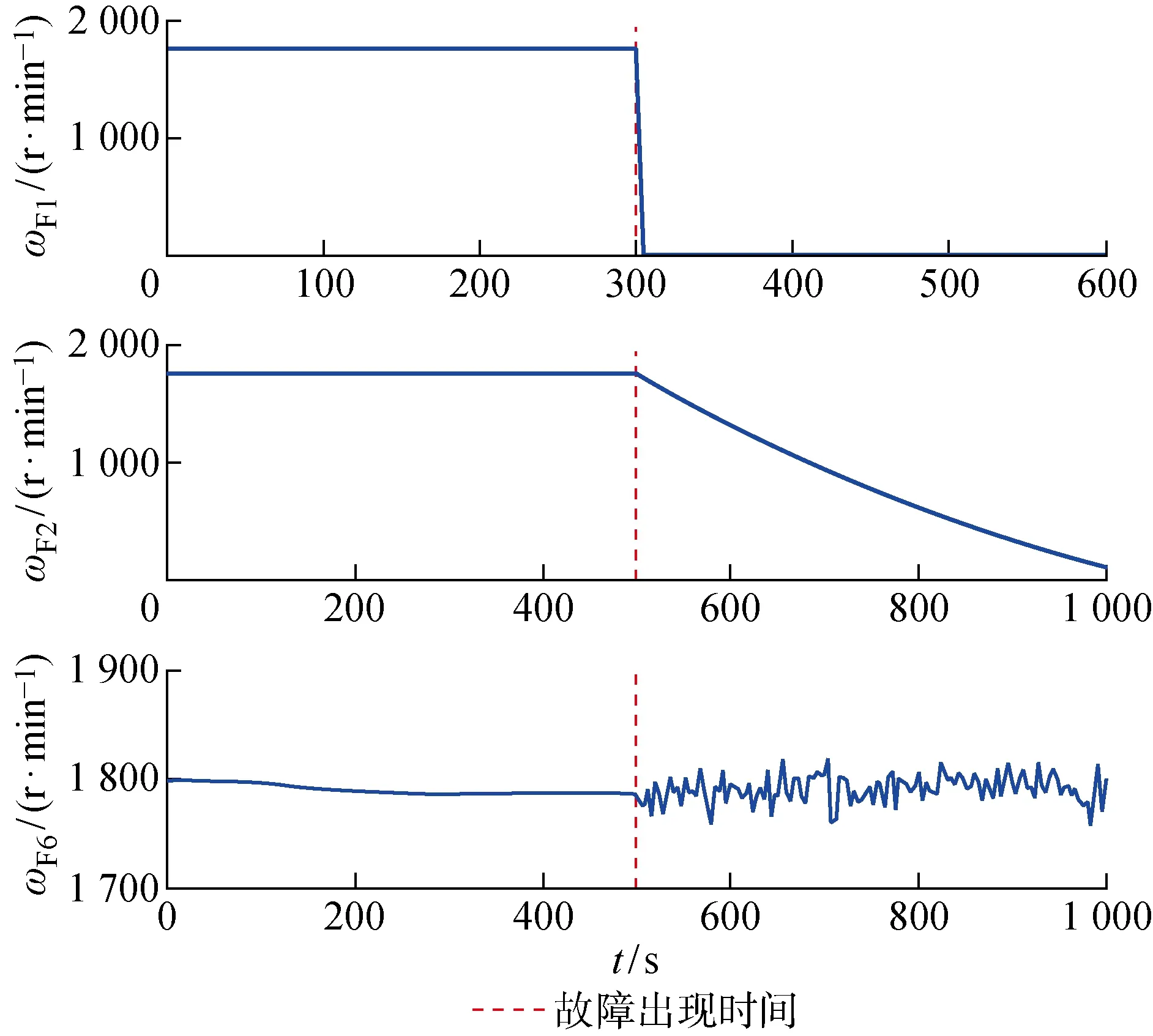
图3 故障模式F1、F2及F6下反作用轮转速曲线Fig.3 Rotation speed curves of reaction wheel in fault mode F1, F2, and F6
由于卫星实际在轨姿态控制中使用反作用轮闭环PID控制并且将反作用轮转速维持在中心转速附近,因此反作用轮摩擦故障、增益下降故障及缓变故障等会被卫星姿控闭环控制算法所掩盖,仅通过对卫星遥测数据的观察想要对故障进行识别是非常困难的.
在反作用轮仿真模型运行至500 s时设置了摩擦力矩故障,将摩擦力矩乘以故障倍数K3(K3=1.5),摩擦故障下的反作用轮控制力矩、电机电流及测量转速曲线如图4所示,图中Tc为反作用轮控制力矩.可以看到,该类故障无法简单通过遥测数据被识别.
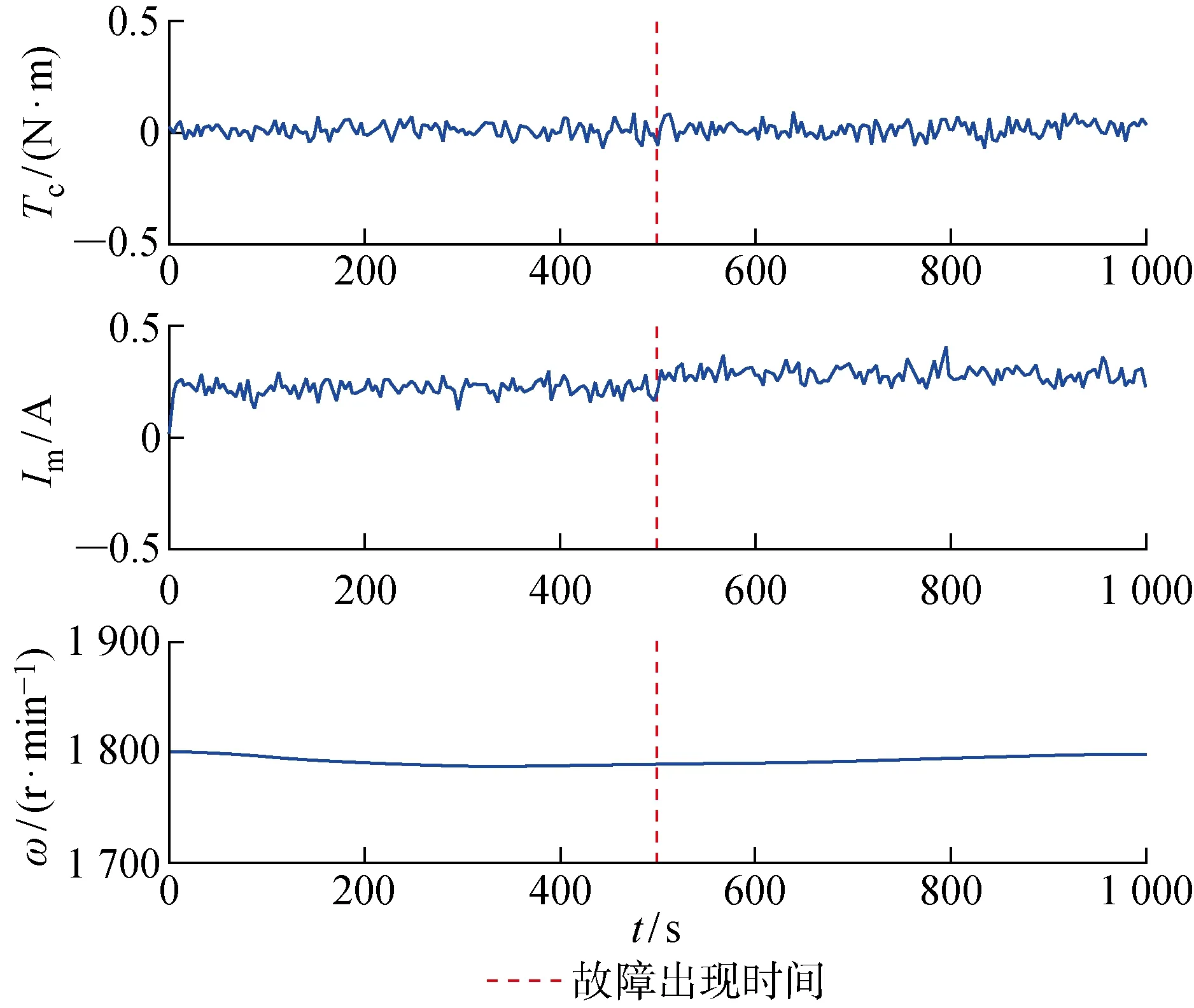
图4 反作用轮摩擦故障下的遥测曲线Fig.4 Telemetry curves of reaction wheel at friction fault
3 合成残差式反作用轮故障检测方法

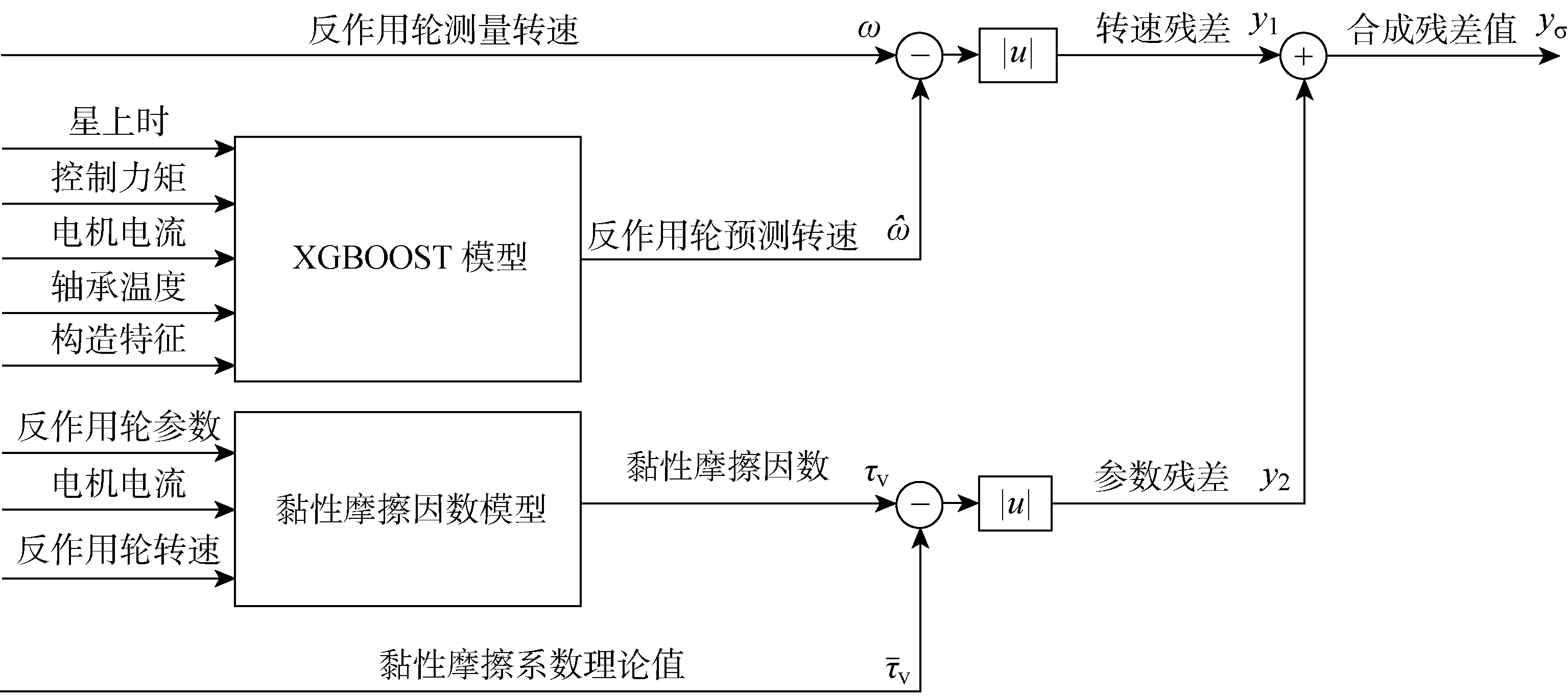
图5 合成残差式故障检测方法框图Fig.5 Block diagram of fault detection method with combined residual
用于反作用轮故障检测的合成残差yσ由两项残差项加权相加获得:
yσ=ω1y1+ω2y2
(4)
式中:ω1、ω2为权重.基于经验,将ω1设置为1,ω2设置为105.
利用y1可以对反作用轮转速具有明显突变的故障和摩擦力矩相关故障进行有效的检测.结合y2使得算法对微小的摩擦力矩变化敏感度更强,针对摩擦力矩相关故障的检测性能有了进一步的提升.
为了计算反作用轮合成残差阈值,需要截取一段正常状态的在轨遥测数据进行模型训练和合成残差计算.合成残差阈值根据3σ原则确定,通过下式计算可以得到反作用轮正常状态下的合成残差项阈值
(5)

针对反作用轮在轨遥测数据进行故障检测,即将输入数据代入完成训练的模型中进行合成残差计算,残差小于阈值的判定为正常数据,反之判定为故障数据.
3.1 基于XGBoost的反作用轮转速回归模型残差
基于机器学习实现人工智能故障检测的方法不需要精确建模和过往专家经验,通过数据驱动由算法来学习内在逻辑实现故障检测,端到端性能强大,其应用正逐渐变为一种趋势.文献[21]中针对旋转机构的故障检测问题分析了各种典型机器学习算法的优劣,并对算法性能进行了比较,其中介绍的故障检测主要为基于监督学习的分类算法,对于样本的要求较高,如果没有足够的故障样本,很难对模型进行充分训练.由于航天器本身设计注重可靠性,加以遥测数据下行能力的限制,在轨卫星实时遥测中故障样本数据非常稀少,而延时遥测数据点过于稀疏,几乎无法实际应用于故障检测.因此,本文采用回归算法作为学习模型,使用回归值残差进行故障检测,解决了故障样本稀缺的问题.
XGBoost是Chen等[22]设计的一种集成学习模型,属于提升方法(boosting)中的一种,算法将许多分类与回归树(CART)模型进行集成,形成一个强大的学习模型.算法的核心思想是利用贪心算法学习新的回归树,将每个回归树模型的回归值进行累加处理,更好地利用损失函数来进行模型的优化.目标函数设置为
使用基于XGBoost回归模型来进行转速预测主要是出于两个原因:首先是因为算法的性能优越,其精度较经典机器学习模型更高并且能够更好地防止过拟合;其次,该算法更适合在轨卫星的实际遥测特点,并且易工程化实现.下面针对上述原因做出具体分析.
3.1.1算法性能优越 XGBoost模型采用集成学习,将多个回归树模型进行集成,形成了一个强大的学习器.并且算法中对目标函数进行了二阶泰勒近似,有利于梯度更快速准确地下降,从而实现更高的精度.此外,模型在目标函数中加入了正则项用于控制模型的复杂度,还吸收了随机森林(RF)的列抽样方法进行随机的特征筛选,这两种方法都有效地降低了过拟合.
3.1.2符合在轨卫星遥测特点 不同的机器学习模型适用于不同的任务场景.针对图像及文本的大型非结构数据而言,神经网络算法显著优于其他机器学习算法,但在处理结构中小型结构数据时基于树模型的XGBoost模型则更为适合.在轨卫星遥测数据由于下行能力受限等诸多原因,往往存在数据量有限和数据不完备的特点.XGBoost模型对于数据量的需求较神经网络算法要小得多,并且采用了稀疏性感知算法进行数据处理,在构建节点的过程中仅考虑非缺失值,并且对每个节点默认选择最优的缺失值分支方向,很好地克服了遥测数据不完备的情况.此外,由于该算法可以基于遥测实时包数据进行训练,因此不必在地面上进行大量模型训练工作,获取遥测数据就能够对已经发射入轨的卫星进行地面故障检测系统构建,容易落地实现工程化.
常见的卫星反作用轮遥测量包括星上时间、转速、控制力矩、电机电流及轴承温度,都是实际可获取到的输入.考虑到反作用轮的转速与上一拍的各遥测量都有较强的相关性,增加与上一拍星上时间秒差值、上一拍的星上时间、转速、控制力矩、电机电流及轴承温度作为构造特征.同时,引入上一拍遥测和星上时差的构造特征也有利于针对卫星遥测丢包时的模型训练.
此外,根据学者研究,反作用轮正常状态下,一些机理相关的特征存在特定的规律[20],这类特征加入模型训练对于故障检测会有不错的效果.文献[20]中对反作用轮各个观测量间物理关系进行推导得知,正常状态下,反作用轮电动机电流与控制电压的比例系数Kiu和角动量变化率与控制电压的比例系数Kmu应该维持在一个常值附近.Kiu和Kmu可直接由卫星遥测量计算得出:
(8)
(9)


将上述相关反作用轮遥测(除转速外)和构造特征作为XGBoost模型输入,将转速遥测作为输出,对XGBoost模型进行训练并得到转速回归值的预测模型.完成XGBoost模型的训练之后,将需要进行故障检测的反作用轮遥测数据输入给模型即可得到转速预测值,将实测值减去预测值即可得到转速残差项:
(10)
使用XGBoost模型来进行故障检测方法构建的合理性体现在其对于转速预测的精度上,转速预测的精度越高,故障检测的性能越好,不仅包括文中提到的典型故障,还有一些隐性故障和混合故障等.利用反作用轮闭环控制仿真模型的4 s遥测数据,将XGBoost模型和经典回归模型如LASSO、RIDGE、ENet、KRR及SVR进行对比,精度评价指标采用决定系数R2、平均绝对误差MAE、均方误差MSE及均方根误差RMSE,模型精度对比见表3.模型残差项曲线见图6,图中为了使曲线更清晰地显示出各模型间的区别,作了平滑处理.

表3 经典回归模型精度对比Tab.3 Accuracy comparisons of classical regression models

图6 经典回归模型残差曲线Fig.6 Residual curves of classical regression models
从表3和图6可知,在基于在轨卫星反作用轮遥测数据的转速预测任务中,XGBoost模型的预测精度优于其他的经典回归模型,因此选择该模型进行转速残差项的计算,以实现反作用轮的故障检测.
3.2 黏性摩擦因数残差
通过文献[23]可知,τv在反作用轮处于正常状态下工作时应保持为一个较为稳定的值.根据文献[23]中公式:
(11)

假设τc是一个常值,那么可以得到:
(12)
(13)
上式中Im和ω是卫星常规遥测数据,Kt、τc及J是反作用轮的主要出厂参数,都是实际容易获取的.利用式(13)可以计算出卫星姿态机动过程中的τv,通过反作用轮闭环控制仿真模型生成数据进行计算,结果如图7所示.
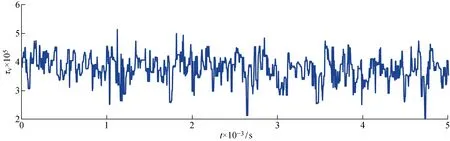
图7 姿态机动过程中黏性摩擦因数曲线Fig.7 Viscous friction coefficient curves in attitude maneuver
在反作用轮仿真模型运行至 2 500 s时设置摩擦力矩故障,分别将摩擦力矩乘以不同的故障系数K3(K3=1.4, 1.5, 1.6, 1.7),观察不同故障系数下τv的变化.
通过仿真可以发现,τv对于反作用轮摩擦力矩的异常较为敏感,因此黏性摩擦因数残差可以为摩擦力矩类故障的检测提供支撑.图7、8中黏性摩擦因数曲线均通过4 s数据采样求得并经过了中值滤波处理.
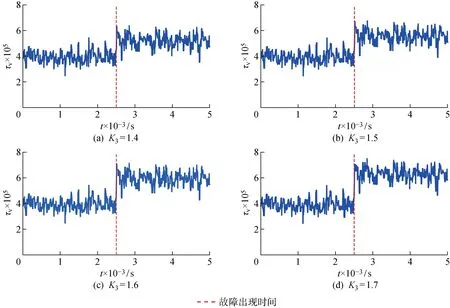
图8 不同摩擦力矩倍数下黏性系数曲线Fig.8 Viscous friction coefficient curves at different friction moment multiples

(14)
4 仿真校验
4.1 正常状态下的残差分析
本文设计的反作用轮故障检测方法基于残差原理,因此合成残差阈值大小最终决定了故障检测的效果.
假设卫星实时单机包中所有反作用轮遥测量都以4 s周期进行下发,利用卫星境内实时包进行反作用轮的故障检测.按照4 s周期根据反作用轮闭环控制仿真模型获取遥测数据,仿真模型中对反作用轮电机电流叠加了均值为0、方差为0.001 A2的白噪声,力矩控制指令叠加均值为0、方差为0.01 (N·m)2的白噪声,转速及轴承温度叠加了均值为0、方差为0.1 V2的白噪声.

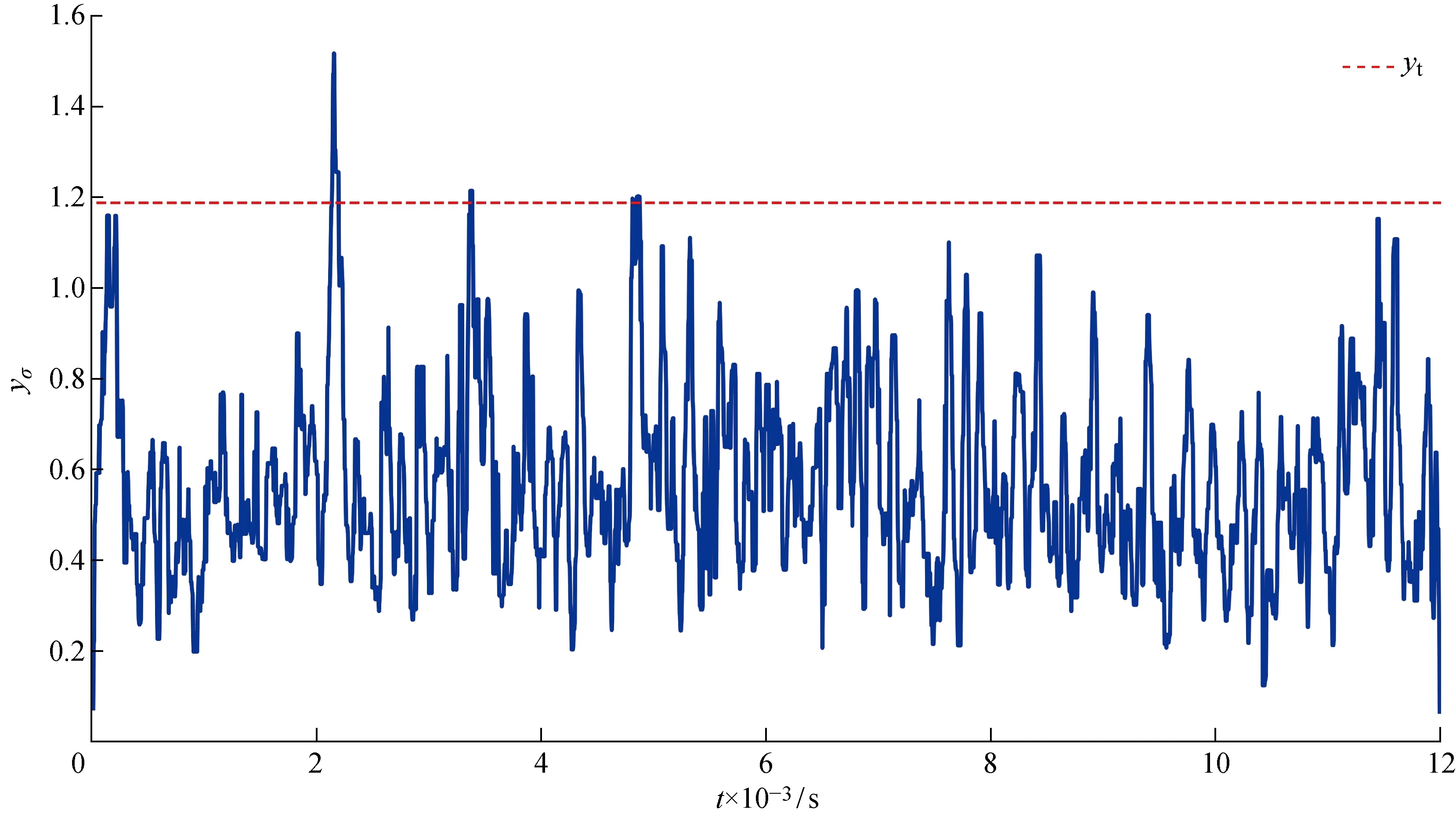
图9 正常状态下的合成残差项曲线Fig.9 Combined residual curves under normal conditions
4.2 常见反作用轮故障检测
在反作用轮闭环控制仿真模型中对各类常见故障模式进行设置,验证本文中设计的合成残差式故障检测方法的有效性.
为模拟反作用轮F1卡死故障,在仿真模型运行300 s时设置摩擦力矩故障,将摩擦力矩乘以故障系数K1=103,使摩擦力矩瞬间激增仿真电机转子和定子抱死状况.为模拟反作用轮F2空转故障,在仿真模型运行500 s时将电机电流置为0,使得反作用轮无法正常接收控制力矩指令,随时间缓慢滑行至0转速.为模拟反作用轮F3摩擦故障,在仿真模型运行 5 000 s时设置摩擦力矩故障,将摩擦力矩乘以故障系数K3=1.43,等效于反作用轮摩擦力矩在原有基础上提升43%.为模拟反作用轮F4增益下降故障,在仿真模型运行 5 000 s时将电机电流乘以电机力矩系数K4=0.79,模拟驱动电机效率瞬时下降21%.为模拟反作用轮F5缓变故障,在仿真模型中将摩擦力矩乘以故障系数K5,该系数随时间缓慢增大,如下式:
K5=1+β5t
(15)
式中:参数β5=0.21×10-3.
为模拟反作用轮F6跳变故障,在仿真模型运行 5 000 s时将控制力矩指令叠加一个均值为0、方差为0.001 (N·m)2的白噪声.
合成残差故障检测方法针对各常见反作用轮故障检测效果如图10所示.在图10(a)~(f)中,合成残差项的突变代表设置的各类故障可以被成功检测出来.由图10(e)可见,随着时间累加,合成残差不断增加,表现出故障逐渐恶化的趋势.
此外,本文设计的方法不需要对故障样本的先验知识,只要测量信号与预测值产生了的一定偏差即可检测出故障,因此对于未知和混合故障也具有很好的检测效果.图11中合成残差曲线对应了在仿真模型 5 000 s时设置的摩擦与增益下降双重故障(K3=1.3,K4=0.9).
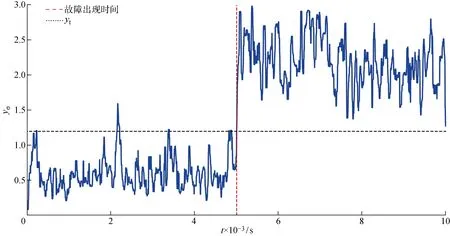
图11 混合故障模式下的合成残差曲线Fig.11 Combined residual curve in fixed fault mode
使用两项故障检测指标分析方法,分别为特异度(SP)和准确率(Acc),即
(16)
(17)
式中: TN(True Negative)表示将负类预测为负类数; FP(False Positive)为假表示将负类预测为正类数;TP(True Positive)表示将正类预测为正类数;FN(False Negative)表示将正类预测为负类数.SP代表所有故障数据中有多少被正确检测出来的比例,Acc代表被正确判断的数据相对于所有数据的比例.具体结果见表4.
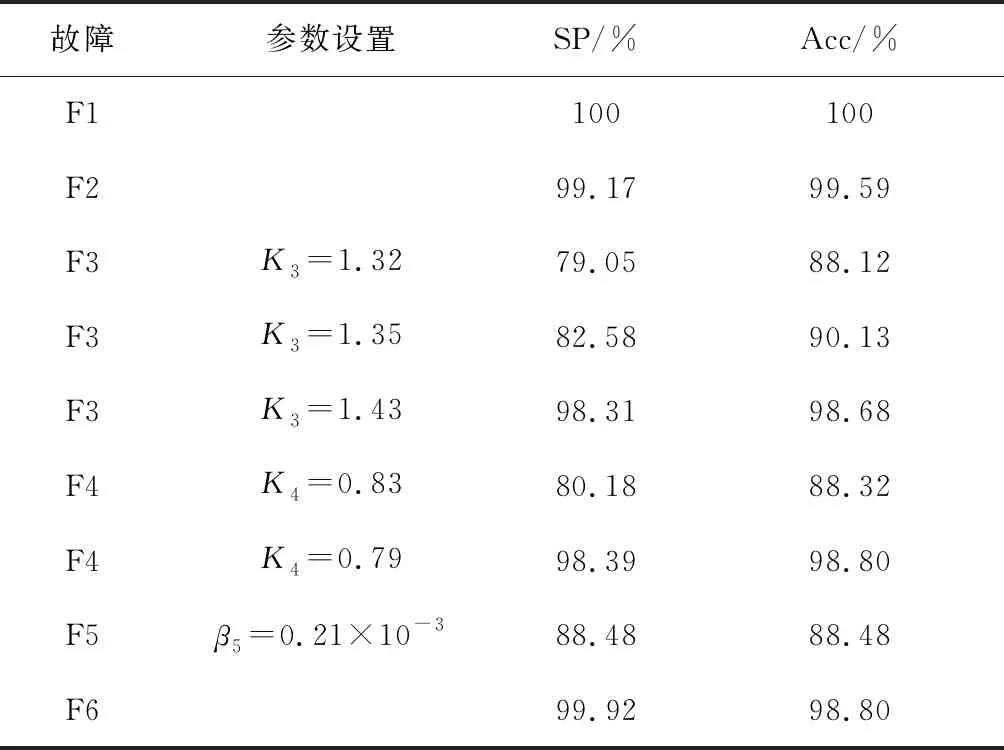
表4 故障检测方法性能分析Tab.4 Performance analysis of fault detection method
从表4看出,合成残差式故障检测方法对于反作用轮转速断崖式下跌或异常波动现象明显的故障检测效果非常优异,特异度和准确率均能保持在98%以上.对于F3摩擦故障和F4增益下降故障而言,检测效果随着故障参数接近正常状态而降低.
4.3 数据不完备状态下故障检测
由于卫星实际在轨遥测数据受限于信号干扰等因素无法达到仿真模型数据的洁净度,经常会出现丢包或单拍数据解析错误的现象.此外,由于星上资源有限,一般卫星遥测不会将大量的下行能力耗费在单机数据包上.因此,反作用轮遥测包中各遥测量经常会被拆分至多个不同频率的遥测包中,即反作用轮的遥测量存在获取频率不一致的情况.地面故障检测方法应对于不完备状态下的数据具有一定的稳健性才能够具备应用价值.
根据卫星实际在轨遥测特点,主要针对两类数据不完备特性进行故障检测方法的验证:① 单机遥测数据丢包特征;② 单机遥测量获取频率不一致特征.
使用本文提出的合成残差式方法进行数据丢包状态下的反作用轮故障检测,在指定的故障参数设置下(K3=1.43,K4=0.79,β5=0.21×10-3),检测性能相比数据完备状态下有微弱下降,但特异度和准确率依然可以维持在85%以上,详见图12,图中R′为丢包率.
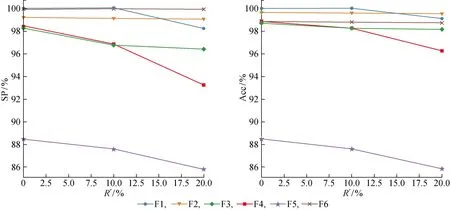
图12 丢包状态故障检测方法性能对比Fig.12 Performance comparison of fault detection method in loss status
针对遥测频率不一致的情况,故障检测方法特异度维持在81%以上,准确率维持在87%以上,详见表5.
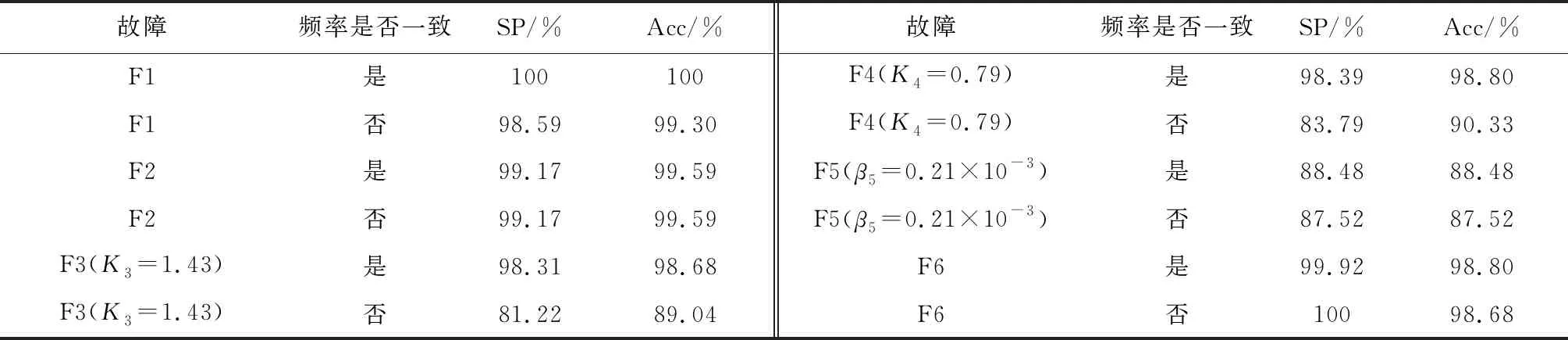
表5 遥测频率不一致状态故障检测方法性能对比Tab.5 Performance comparison of fault detection method at inconsistent telemetry frequencies
从上述分析中可知,虽然在遥测数据不完备的特征下合成残差式反作用轮故障检测算法性能相对完整4 s包实时遥测状态有一定的降低,但依旧可以对遥测进行有效检测(特异度和准确率均维持在81%以上),稳健性较好.
5 结论
合成残差式反作用轮故障检测方法将极端梯度提升回归模型残差和黏性摩擦因数残差进行了合成,有效利用了黏性摩擦因数对摩擦力矩突变的敏感性,对常见在轨闭环控制的反作用轮故障有着优异的检测效果,对数据样本的要求较低,当在轨遥测数据不完备的情况下依然能够进行有效的检测,可以应用于实际地面故障检测系统.
猜你喜欢
空间控制技术与应用(2022年4期)2022-09-01 10:11:30
网络安全与数据管理(2022年3期)2022-05-23 13:26:48
北京航空航天大学学报(2020年10期)2020-11-14 09:26:02
自动化学报(2019年6期)2019-07-23 01:18:32
电子制作(2019年11期)2019-07-04 00:34:40
扬子江(2019年1期)2019-03-08 02:52:34
电子测试(2018年13期)2018-09-26 03:30:00
北京航空航天大学学报(2017年1期)2017-11-24 05:22:43
现代工业经济和信息化(2016年6期)2016-05-17 05:36:13
河南科技(2015年8期)2015-03-11 16:23:52
