风力机叶片表面损伤搜索路径优化
2021-06-28 09:51马铁强姜喜耀孙传宗刘博阳单光坤
重型机械 2021年3期
马铁强,姜喜耀,孙传宗,刘博阳,单光坤
(沈阳工业大学 机械工程学院,辽宁 沈阳 110870)
0 前言
叶片是风电机组的核心部件之一。风电机组在野外环境下长期运行,叶片表面损伤长期不断累积,将对风电机组安全构成重大影响[1]。为了避免重大事故和潜在风险,风电场需要对叶片表面进行定检和维护[2]。风力机叶片表面损伤检测手段多样,例如望远镜观测、人工悬索观测等。其检测工作均人工完成,干扰因素多、维护成本高、检测效率低[3]。
随着风电机组向大型化发展,叶片尺寸不断加大,叶片养护成本也不断增加[4,5]。为了降低叶片养护成本,保障维护人员安全,机器人、无人机开始应用到风力机叶片表面损伤检测。文献[6]用无人机对风电机叶片表面缺陷图像采集,实现了损伤的识别与分类。文献[7]研究了海上风电机组叶片的旋翼无人机巡检技术,由于没有规划搜索路径,导致在有效续航时间内无法完成更多的检测任务,效率偏低。
本文提出一种风力机叶片表面损伤的无人机优化搜索路径规划方案,以种子填充算法与质心算法相结合确定叶片表面损伤位置与疑似损伤位置的质心坐标,采用模拟退火算法对损伤位置搜索路径进行优化。
1 巡检系统构成
无人机的飞行路线普遍由人工操作,存在对风力机叶片疑似损伤位置图像收集不全面、人为操作图像采集过程较长等问题,并且四旋翼无人机具有六个自由度,六个输出状态,由四个输入力为六个输出状态提供动力,属于欠输入系统,对人工操作要求相对较高,有与风力机发生碰撞的风险,所以对无人机巡检路径进行规划显得尤为重要,本文以风力机叶片疑似损伤位置为出发点,提出种子填充模拟退火算法的风力机叶片表面损伤路径优化方法。具体的巡检系统结构由无人机系统、图像采集系统、损伤分析系统构成,其中无人机系统包含机体、飞行控制器,通过遥控系统、地面站对飞行控制器发送指令来控制无人机飞行,以无人机机体为载体搭载图像采集系统来获取风力机叶片表面损伤图像。该方法优化的路径传输给巡检系统的飞行控制器,以此规划无人机的飞行的路径,具体结构如图1所示。
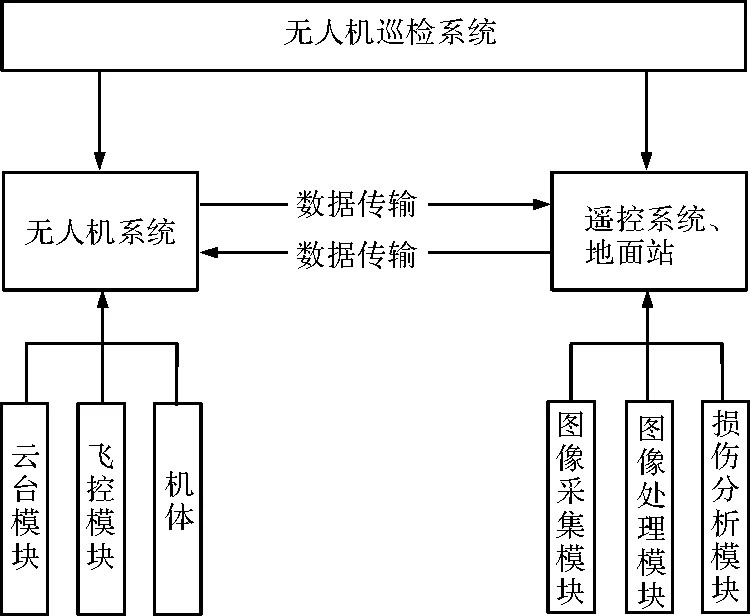
图1 无人机巡检系统
由于风力机工作环境如太阳光照、阴雨天气等对图像采集工作产生强烈影响,使后续的损伤分析准确度降低。风机有三个叶片,每个叶片由前缘、后缘、吸力面和压力面构成,完成三个叶片的巡检作业, 需要旋翼无人机多次起落,实现对所有风力机叶片表面的覆盖,巡检时间大约为40 min。本文研究为了提高无人机的工作效率、减少无人机的巡航时间。
2 叶片表面图像的预处理
理论上,风力机叶片具有形状光滑、色彩均匀的表面。然而,风电场多位于天气多变、环境复杂的野外环境,受太阳光强变化、云层遮挡及表面污物的影响,风力机叶片图像表现出非均匀、不连续等特性,使得获取的图像质量不高。这给风力机叶片确定损伤的数量与位置带来干扰。为了提高路径规划的精确度、损伤识别的准确度,本文采用二维伽马函数自适应校正算法对非均匀、不连续的风力机叶片表面图像进行预处理[8],获得风力机叶片表面完整的二维图像,经过预处理的图像降低了光照等自然因素的干扰,同时降低了图像获取时的噪声干扰有利于损伤轮廓的提取和定位[7,9]。
2.1 叶片表面非均匀图像处理
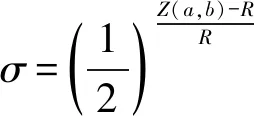
本文借助二维伽马函数自适应校正算法应对风力机叶片表面非均匀图像进行预处理[8]。其具体方法是首先采用多尺度高斯函数来提取光照不均匀的风电机叶片表面的光照分量,多尺度高斯函数为
(1)

根据Retinex理论,结合风力机叶片表面损伤的局部特性,叶片表面非均匀图像算法处理步骤如下:
(1)导入叶片表面损伤图片f(a,b),将RGB格式图像转化为HSV格式图像,提取出亮度V。
(2)采用公式Z(a,b)=E(a,b)⊗f(a,b)计算风电机叶片损伤图像的光照分量,由于在处理光照不均匀的同时需要突出风电机叶片损伤的局部特征,根据Retinex理论,选取较小的c值来增强风电机叶片损伤位置的局部特性。
(4)调整后光照强度结合色调饱和度重新生成RGB图像。
具体算法流程如图2所示。
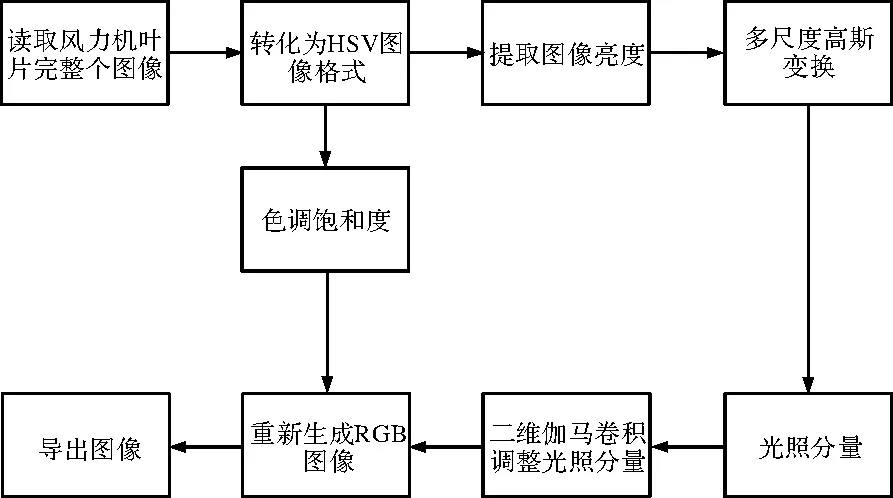
图2 叶片表面非均匀图像处流程
经二维伽马卷积处理,光照不均等因素对风力机叶片图像质量的影响得到抑制。光照处理后如图3所示。
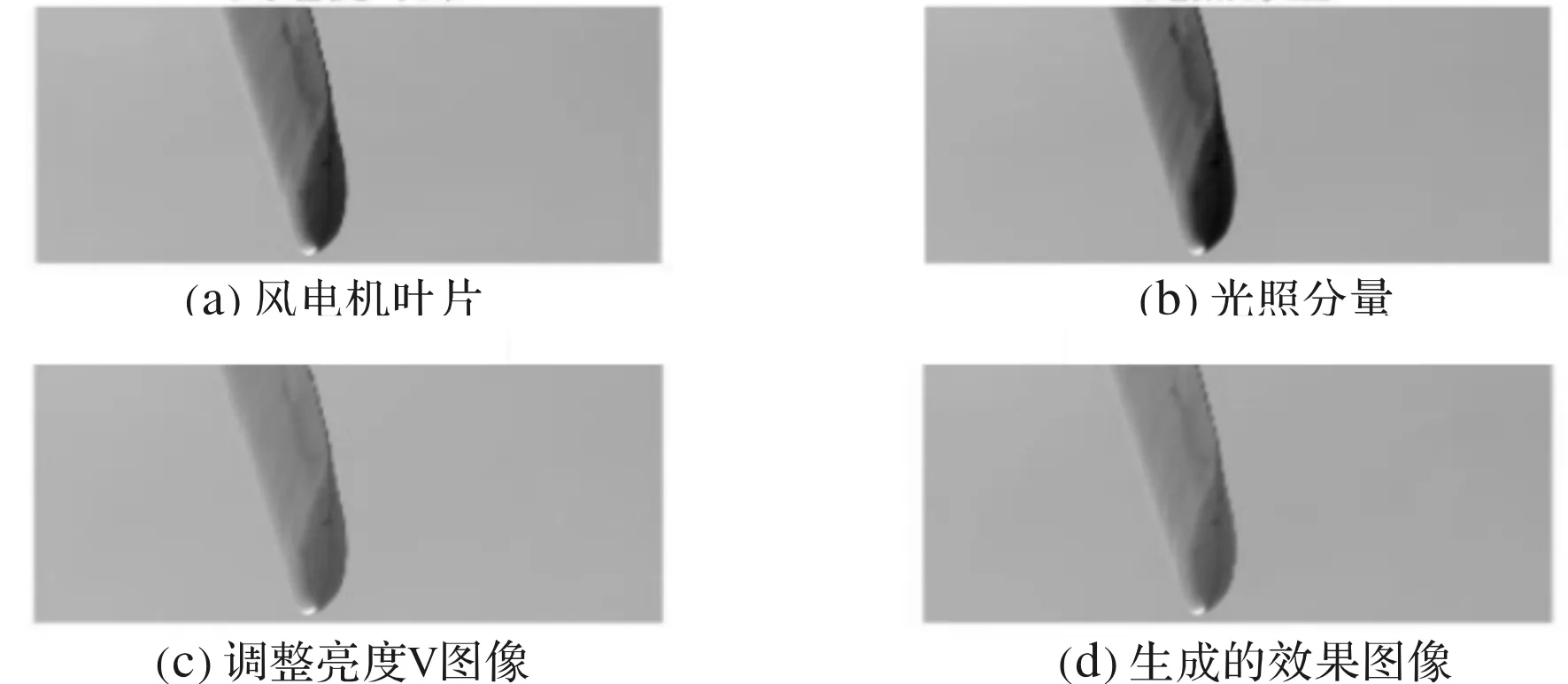
图3 光照处理效果
2.2 风力机叶片形态学操作
为了提高对风电机叶片损伤位置的搜索路径优化,将RGB图像转化为灰度图像,降低图像的通道数,为了进一步提高运算速度,将灰度图像二值化,采用OTSU方法进行二值化,具体步骤如下:加载灰度图像,计算背景图像占总像素比值ε1、计算前景像素比值ε2、计算背景区域的均值ψ1、前景区域的均值ψ2,根据公式(2)得出二值化阈值为128,其效果如图4所示。将处理的图像转化为灰度图像后对灰度图像进行二值化,降低了光照条件对损伤叶片图像的影响,提高了风力机叶片表面损伤二值化的质量[10],为后续的路径优化降低运算量,提升优化速度。

图4 风力机叶片损伤二值化图像
K=ε1·ε2·(ψ1-ψ2)2
(2)
2.3 基于种子填充的叶片损伤质心定位算法
风力机叶片疑似损伤点图像经预处理转化为二值图像,用种子填充算法对风力机叶片表面图像上的疑似损伤位置进行轮廓填充。如图5所示,随机给定一个初始像素点,用八连通区域法在当前像素点的上、下、左、右、右上、右下、左上、左下等八个方向移动,寻找同值像素点,同值像素构成连通域。求解连通域的质心,即可确定风力机叶片疑似损伤位置[11]。

图5 八连通域种子填充示意图
本文用风力机叶片的二维投影作为原始图像,用种子填充算法结合质心算法确定风力机叶片表面疑似损伤位置。
如图6所示,首先读取风力机叶片的二值图像,设像素坐标为S(p,q)。若图像上某一位置的像素值S(p,q)=1,选择像素点S(p,q)为起始种子像素点;判断像素值是否为1、将满足条件的像素点合并到同一像素集X。集合X即为风力机叶片疑似损伤位置的连通域。
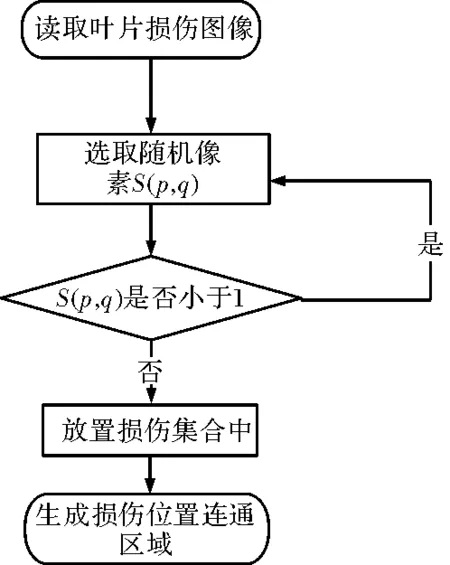
图6 叶片损伤轮廓
设风力机叶片损伤数量为L,损伤位置的质心坐标表达式为

(3)
以图4某叶片的二维投影为例,通过种子填充算法对风力机叶片损伤位置填充,采用式(3)提取填充后的损伤位置质心坐标,求得风力机叶片损伤图像质心总计37处,具体数据如表1所示。
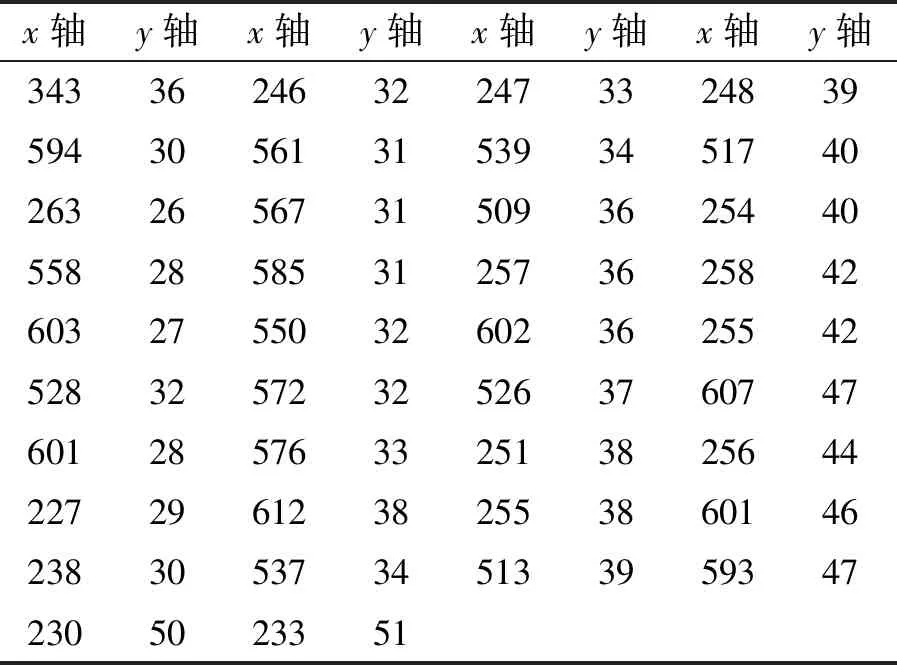
表1 风电机叶片损伤位置质心坐标
通过获得风力机叶片表面疑似损伤位置,为后续的叶片表面损伤搜索的路径优化提供了具体质心坐标位置,无人机采用以此坐标位置优化后的路径巡检,使损伤位置获取更清晰的损伤图像。
3 叶片表面损伤搜索路径模拟退火优化算法

(1)定义集合{T1,T2,T3,…,Tn}为解空间M,即为风力机叶片表面疑似损伤点的排列,而集合M={(HT1,HT2,HT3,…,HTn),HT0=A0}为{T1,T2,T3,…,Tn}所有的循环排列的组合,每一种排列组合代表一条搜索路径。用Metropolis准则确定初始路径为{T1,T2,T3,…,Tn}。
(2)确定目标函数f=(T1,T2,T3,…,Tn)为无人机扫描经过所有风力机叶片表面疑似损伤点的路径长度。其公式定义为
(4)
(3)根据表1所列数据,用蒙特卡洛准则求解每条路径的代价函数差值为
Δf=(dHTm-1HTn+dHTmHTm-1)- (dHTm-1HTm+dHTnHTn-1)
(5)
(4)由步骤3中所求Δf判断是否接受新解,即是否接受新的路径。
根据Metropolis准则,结合优化目标,其公式为
(6)

(5)设置算法相关参数,温度衰减系数Co、初始温度、迭代次数。
4 实验与分析
为提高对风力机叶片表面损伤巡检路径优化的效率,经过多次仿真实验对模拟退火参数设置如表2所示。

表2 优化路径相关参数
根据风力机叶片疑似损伤点数据,对搜索路径最优规划进行多次仿真实验,提取5组仿真结果,结果如表3所示。
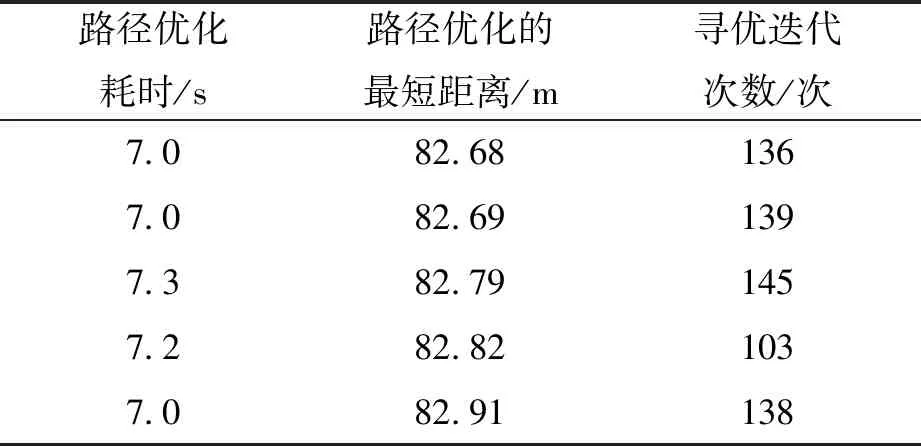
表3 路径优化结果
通过表3可得出路径优化的耗时区间在7.0 s到7.3 s总体差距不大,经过路径优化的最短距离在82 m到83 m之间,其寻优迭代次数在103到145次,本文以路径最短为优化目标,所以提取其路径规划方案如图7所示,以1号为出发点规划的全局路径为1→31→34→32→30→25→28→38→37→8→9→10→19→27→29→24→36→35→33→17→23→5→2→13→16→15→12→11→4→14→20→18→6→21→3→22,其总距离为82.68 m,经过风力机叶片疑似损伤位置为37处,具体路线如图7所示,经过模拟退火算法能够快速收敛得到最优解,通过该方法能够快速规划出风力机叶片损伤位置的最优巡检路线。
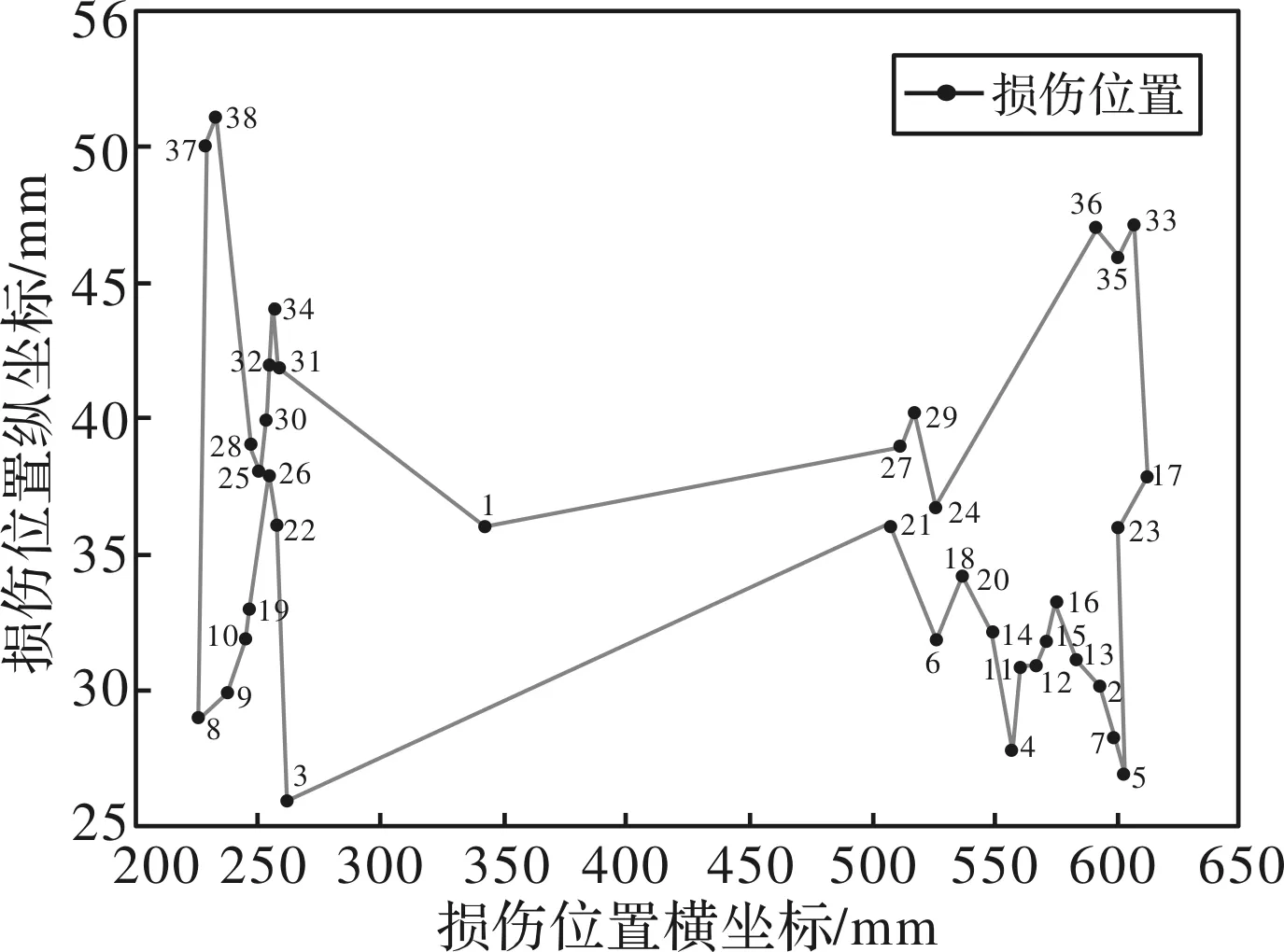
图7 风电机叶片损伤位优化搜索路径图
5 结束语
本文基于风力机叶片疑似损伤位置的质心坐标进行路径规划,采用模拟退火算法对其进行优化。通过优化以7 s时间规划出其巡检的最优路径,并计算出相应的最短距离,因此证明本文提出的基于模拟退火算法结合质心算法的风力机叶片表面损伤的无人机优化搜索路径的方法具有较好的优化效果。本文研究还存在不足为应设置相应的巡检重点区域来优化巡检的路径,且未考虑多机协同的路径规划问题及路径优化后无人机获取的图像分类识别问题。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
测控技术(2018年5期)2018-12-09
测控技术(2018年3期)2018-11-25
电测与仪表(2016年17期)2016-04-11
电源技术(2015年5期)2015-08-22
振动工程学报(2015年1期)2015-03-01
太阳能(2015年6期)2015-02-28
城市轨道交通研究(2015年3期)2015-02-27
航天器工程(2014年5期)2014-03-11