基于物联网的RH真空系统远程智能监控与诊断
2021-06-28 09:50程功荣韩俊峰
重型机械 2021年3期
程功荣,佟 冰,邓 杰,韩俊峰,贾 涛
(中国重型机械研究院股份公司,陕西 西安 710032)
0 前言
RH机械真空泵设备复杂,故障点多,生产过程中出现的任何故障都有可能会造成设备受损,人员受伤等情况。而传统的排除故障手段耗费成本较大且易受时间和地区的限制,因此及时有效处理故障是RH生产过程的关键。利用物联网技术, 结合各类采集、控制传感器或控制器,移动通信、智能数据分析等技术开发远程智能监控与诊断平台,对机械设备的运转过程进行实时监控,形成一个可以收集、监测、分析和提供有价值数据的系统,可有效解决设备故障问题。
本文以工业物联网为基础、RH机械真空泵系统为研究对象,将某钢厂RH精炼炉作为依托工程,建立了基于物联网的远程故障诊断平台,设计了物联网在RH真空精炼机械真空泵远程故障诊断平台及其实现方法。
1 RH真空精炼机械真空泵系统概述
RH精炼是一种通过在真空、惰性气体的条件下进行深度脱碳、脱氧、脱氢、去除杂物,调整钢水成分的工艺装置,具有周期短、产能高、效果好、适用范围广等一系列优点。该系统的核心部分由两种旋转式变容真空泵组成,即前级的罗茨泵和末级的螺杆泵。各级真空泵的抽气能力、系统漏气量对RH机械真空泵抽气过程都有影响。
罗茨泵的结构如图1所示,泵腔内的平行轴上安装有两个互相垂直的“8”字形的转子,在转子之间、转子与泵内壁之间存在间隙。工作时,转子旋转,气体由进气口进入到泵腔内,从排气口排出。由于泵内空间封闭,所以被吸入的气体在泵腔内不会发生膨胀或者压缩。转子转动通过顶部转过排气口时,泵内空间与排气侧相通,排气侧的气体压强高,返冲到泵内空间,泵内气体压强也随之增高,转子继续旋转,气体从排气口排出,从而实现了抽气的目的。
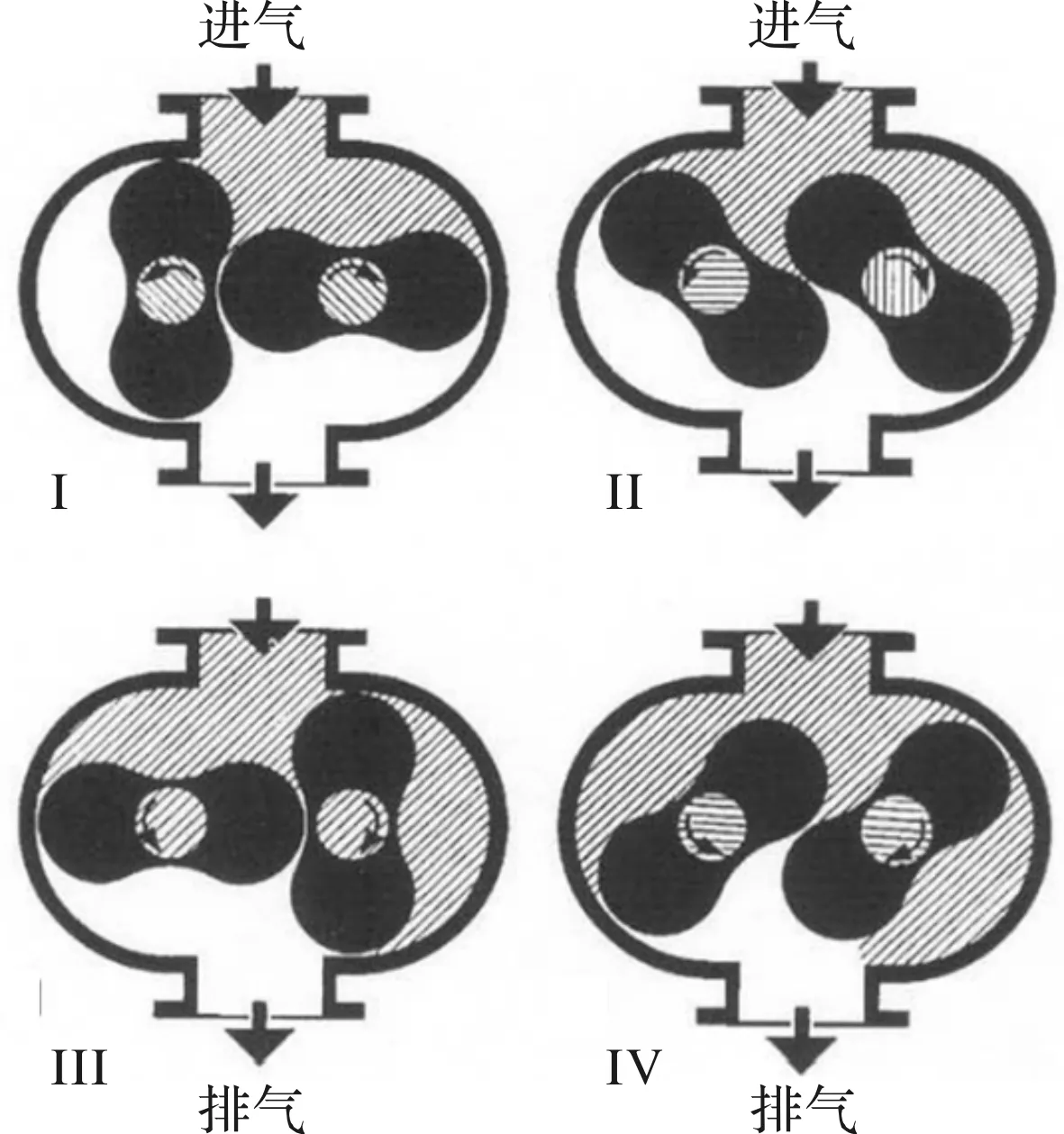
图1 罗茨泵工作原理
螺杆真空泵是通过泵内的左螺杆与右螺杆同步反向的高速旋转,产生吸气和排气作用。泵内壁和泵内螺旋桨螺旋槽将泵内分为多个空间,气体可在该空间内无压缩无膨胀的传输,泵末端的螺旋结构对气体进行压缩,进而形成真空。
2 远程故障诊断平台系统设计
2.1 系统层次设计
物联网是一种多元化的复合性网络体系,通常分为三个层次,即感知层、网络层和应用层如图2所示。
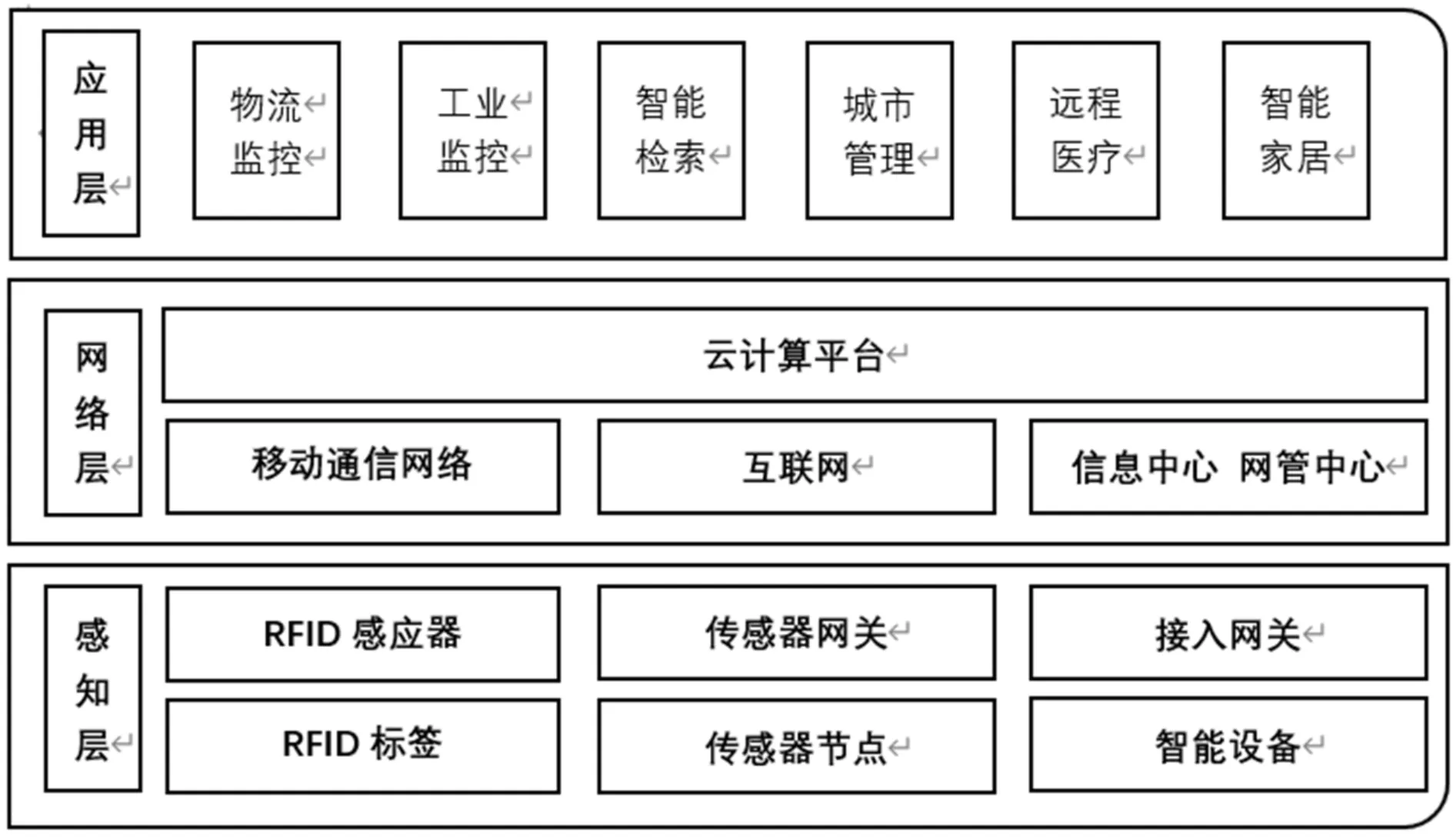
图2 物联网基本架构
2.1.1 感知层
感知层提供感知技术,主要包括各式传感器以及传感技术。在RH生产过程中,感知层由现场监控设备构成,监控设备从温度、压力、振动、转速、负载电流等传感器经控制器,感知层负责RH生产过程中机械泵运行产生的状态信息和生产数据的采集和感知,并按照预先规定的格式处理该信息和数据,然后存储在本地数据库。
2.1.2 网络层
网络层提供网络支持,保证数据的畅通传输。网络层主要将感知层中获取的数据安全、可靠地传输给应用层,以便其调用和观测。在RH真空精炼机械真空泵远程故障诊断系统系统中,网络层主要解决各个协议之间的互联互通,多源数据的融合与共享等传输问题。主要通过数据边缘计算、加密打包传输,由智能网关和穿透云经过4G/WIFI/有线网络等汇聚到诊断平台上。
2.1.3 应用层
应用层是物联网体系的最上层,支撑系统服务。其主要功能是将各物联网服务呈现出来,提供一个“按需索取”的综合信息平台。应用层采用浏览器与上位机软件相结合的方式实现动态数据的监控,同时在服务器端,部署数据分析、报警与预测模型,具有自学习的专家分析和对策数据策略库,提供分析决策预警功能。远程客户端通过浏览器实现对Web发布中心所发布的动态数据画面进行监控。
2.2 软件结构
采用B/S结构即浏览器/服务器结构,在结构中客户端统一设计,服务器上集中了系统的大部分功能。该模式中,用户无需进行安装、维护,仅需通过浏览器就可以使用系统,监控生产过程和设备运行情况。该系统网络结构如图3所示。
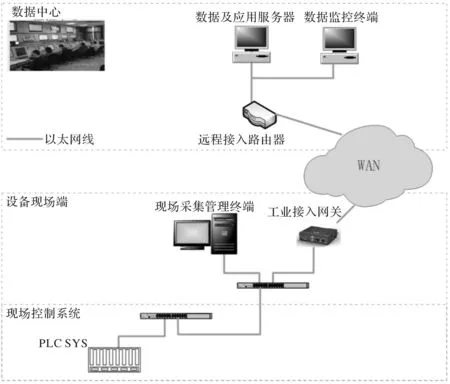
图3 系统结构
B/S结构对外只开放HTTP协议和端口,数据库仅允许服务端进行访问,安全性能更高;所有的开发、运维都在服务器端,系统的管理与升级也更加方便;B/S结构的客户端与服务器数据库之间的连接全部共用一个ODBC来实现,对服务器的要求也更低,B/S模式可以无限扩充用户数目,系统的开发成本大大降低。B/S模式如图4所示。
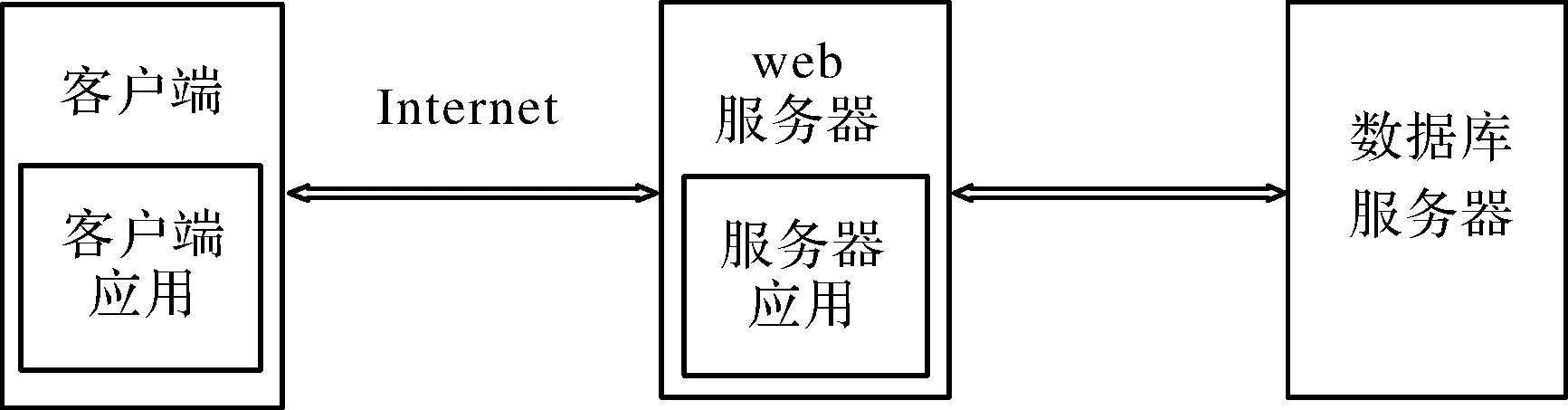
图4 B/S模式
3 远程故障诊断平台功能
基于物联网的远程故障诊断平台主要功能为数据采集、平台配置和故障的预警及报警。
3.1 数据采集及平台配置
3.1.1 数据采集
数据采集通过PLC从机械泵上检测获取数据,对监控系统的动态数据进行采集和处理。主要功能包括:
(1)与机械泵的变频器通过现场总线连接,采集机械泵运行时产生的数据、监控机械泵的运行状态、对机械泵发出调控操作命令。
(2)机械泵的DO端口(数字输出端口)状态输出相应的报警信息。数据采集控制器与该端口连接,实时监测机械泵DO端的状态,发生报警时,及时上传报警信息。
(3)具备充足的数据存储空间,可将特定情况发生点前后一段时间的状态数据全部保存,避免当故障预警或报警发生时,数据采集控制器因为网络阻塞造成传输延时。
(4)与远程监控平台通讯,根据平台的指令执行操作,例如读取机械泵的运行参数、查询历史数据、机械泵运行状态测试等。
(5)网络安全设计方面采用数据传输加密及权限管理。
3.1.2 平台配置
该远程监控监控平台与RH系统数据采集控制器之间采用Modbus-TCP协议。对数据采集控制器的IP地址、主机地址、端口号等通讯参数进行配置,如图5所示。
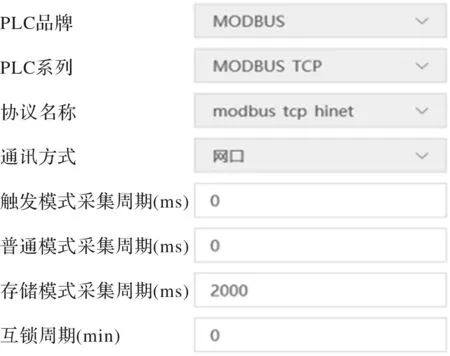
图5 配置信息
信息点表是将数据采集控制器所有的配置信息、现场采集机械泵的各种量按照Modbus协议对应到一张数据表上。对数据采集控制器之前,需要对点表中的I/O通道、通讯地址、设备、数据库等进行认真核对和配置。点表的部分内容表1所示。
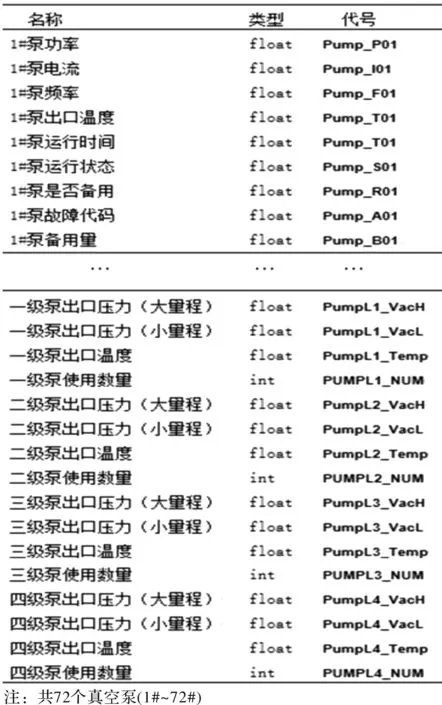
表1 点表配置
配置完成后,点击保存,将通讯点表保存为xml文件。
3.2 远程故障预警报警系统
要对设备故障进行诊断及预报警,首先获取诊断所需要的数据信息和特征信号,包括机械泵的温度、振动、压力等。将各信号当前的状态信息进行提取,通过与历史数据进行比较和归纳,来判断该信号是否有故障倾向,再根据状态信号的趋势来进行总结和诊断。故障诊断的过程如图6所示。
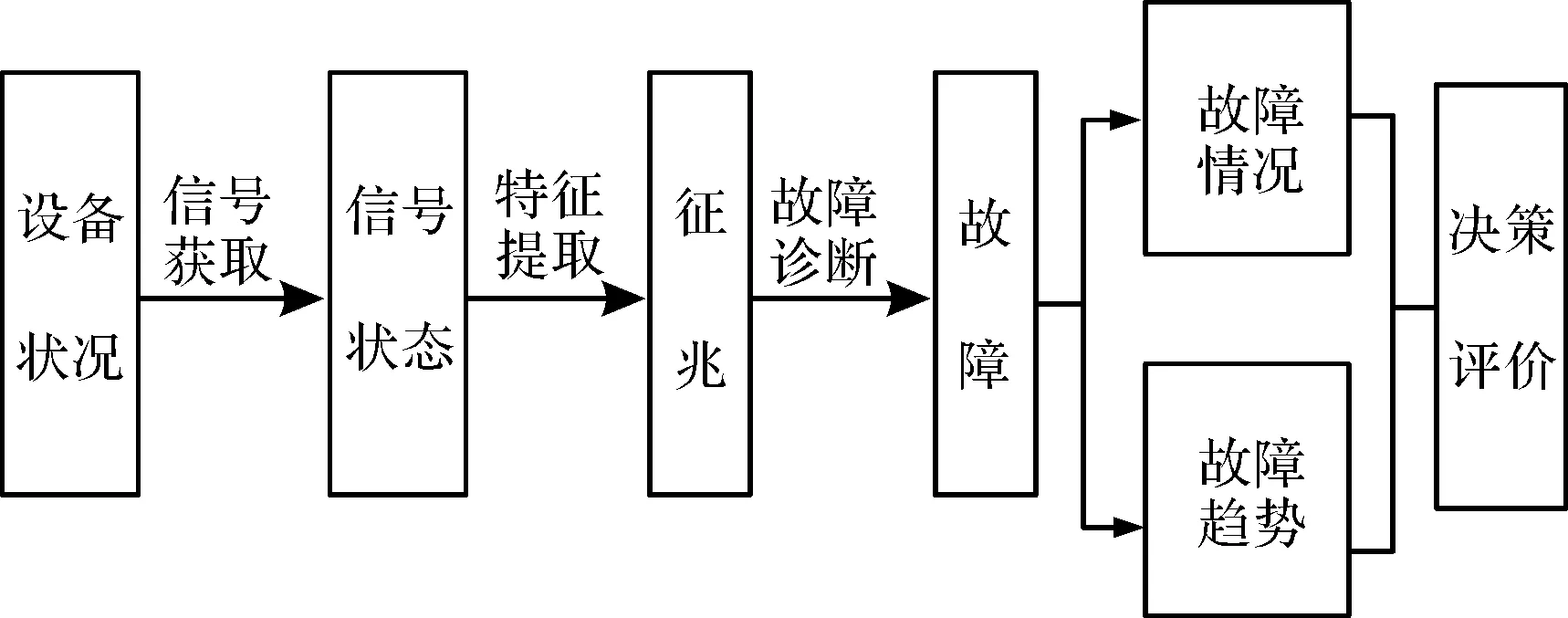
图6 故障诊断过程
3.2.1 预测模型选择
预测模型的作用是在真空泵发生故障前,提前预测故障信息,并进行故障报警。对于机械泵工作功率,如图7所示,机械泵在工作过程(2019年4月25日18∶00 -21∶00),其工作功率呈现周期性变化。因此针对机械泵异常功率,应该选择时间序列预测模型。常用的时间序列预测模型有ARIMA模型、BP神经网络、简单平均模型等。针对RH精炼炉真空系统的设备特点,真空泵的功率在生产过程中呈现周期性变化。相比较于其他预测模型,ARIMA模型更精确、准确率更高。
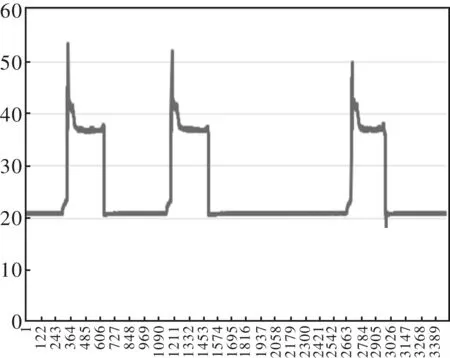
图7 机械泵功率曲线图
3.2.2 故障预警及报警
报警模型的建立需要对故障的发生机理进行研究,同时需要大量的数据支撑。通过长期的数据收集监测,累计故障案例分析总结,建立故障预测机制和算法。该诊断系统通过对各个机械泵生产过程中产生的大量数据进行分组训练、交叉检验来评估单体模型效果,建立单体泵的单一预测模型。通过集成训练单一功率预测模型,最终实现机械真空泵功率报警模型系统。
以四级泵组1601号泵的部分数据为例,每间隔10 s从历史数据中提取2019年5月期间(整月数据)的四级泵组1601号泵功率数据,共计300 000 余个数据点。同时,该平台机械泵正常工作功率范围在50 kW 以内,通过对300 000余个数据点的可视化分析,发现大部分数据符合正常工作功率范围。数据可视化分析后,将这300 000个训练样本数据根据7∶3的比例再次划分成训练数据及测试数据,通过训练数据实现样本外预测。再通过相同方法提取2020年6月前十天内该机械泵的泵功率数据(共计100 000个数据点)进行样本外预测。最终样本内及样本外预测的结果均表现良好,说明该模型可以较好的预测出机械泵功率的大体变化趋势,具备机械泵异常功率预警功能。
2020年6月至7月的机械泵异常功率报警和实际故障数据如表2所示,结果显示报警准确率达85%。因此当机械泵真空系统功率高于正常工作功率时,平台能够立刻针对故障预警及报警,从而保证设备的安全运行。
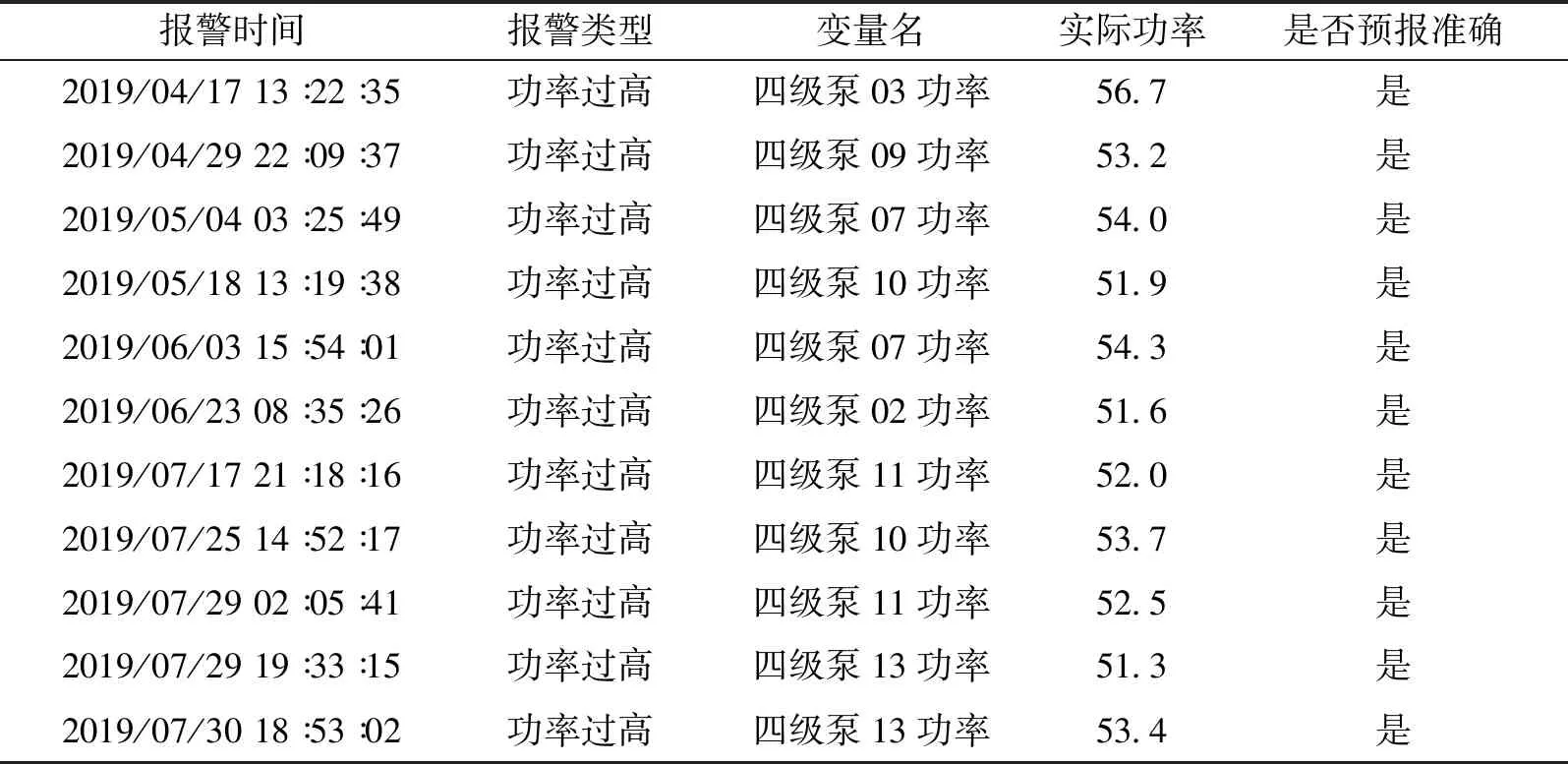
表2 故障报警分析表
4 结束语
基于物联网的远程智能监控与诊断平台在某钢厂RH系统投入至今,(2020年5月至10月)的半年时间里,该系统所依托的RH精炼炉共生产钢液约3 400炉次,机械泵故障预警26次,正确故障报警22次(成功率达到85%),节约200多万元。该诊断平台通过网络通信,为现场设备正常运转提供支持与保障,极大的减少了设备使用方因设备故障、维护带来的不必要的经济损失,有效地解决了传统故障诊断和设备维护中存在的问题。
猜你喜欢
军事文摘(2022年20期)2023-01-10
设备管理与维修(2022年21期)2022-12-28
水泵技术(2022年2期)2022-06-16
英语文摘(2021年11期)2021-12-31
造纸信息(2019年7期)2019-09-10
学生天地(2018年19期)2018-09-07
铁道通信信号(2018年5期)2018-06-28
汽车维护与修理(2016年10期)2016-07-10
小学生·多元智能大王(2015年3期)2015-05-25
汽车维护与修理(2015年6期)2015-02-28