
智能抹灰机振动压实动力学特性研究及其应用
2021-06-27 08:01:46史丽晨侯彦宸王海涛
机械设计与制造 2021年6期
史丽晨,侯彦宸,王海涛
(西安建筑科技大学机电工程学院,陕西 西安 710055)
1 引言
随着近些年来高速发展的城市化趋势,以及拆迁改建的高速推进,整个建筑行业已经进入了蓬勃发展的时期。但是,制约其发展的一个至关重要的因素便是劳动力的紧缺,所以,建筑施工的机械化与自动化成为了必然趋势[1]。在近些年快速发展工业化的趋势下,机器替代人力进行劳动的工作已经越来越多,其中就包括建筑墙面抹灰。传统的墙面抹灰是靠人工作业的方式进行施工从而完成的,它的特点是抹灰效率低,劳动强度大,并且抹灰质量因人而异故难以达到高标准的要求。
建筑墙面抹灰机是一种可以代替人工作业完成大面积抹灰的建筑机械,它对于节省劳动力成本很有帮助,能够提高生产力,在较短时间内完成抹灰作业任务,减少宝贵的时间和项目成本。抹灰机的应用能够为传统人工施工的作业模式带来很大改变,可以改善其抹灰效率低,抹灰质量差,人工劳动强度大且施工周期长等劣势。因此,抹灰机取代人工抹灰是必然趋势。
如果墙面抹灰的质量没有达到验收标准,就会造成返工,这样不仅会浪费材料,还会延误工期。因此,抹灰工作的关键问题就是如何保证抹灰质量。影响抹灰质量的因素大体有两方面,一方面影响因素是机械施工,另一方面则是会受到灰料配比或添加物成分的影响。因此,研究的重点就是如何改善并提高墙面抹灰的质量。
通过对振动压实过程的仿真与分析系统的动力学特性,研究了振动频率、激振力幅值、振幅等参数对灰浆振动压实效果的影响,研究了在不同水灰比下的灰浆在振动下的动态响应,为抹灰机合理选用振动参数以及压实效果的预测提供了理论基础,对实际抹灰工作具有指导意义。
2 抹灰机动力学模型的建立
2.1 抹灰机工作原理
抹灰机是一种用于墙面抹灰的建筑机械,可以将灰浆涂抹至墙面,并且抹平与振动压实,完成抹灰工作。根据设计需求研究设计了一种新型抹灰机[2-4],抹灰机简图,如图1所示。

图1 抹灰机示意图Fig.1 Schematic Diagram of Plastering Machine
抹灰机由四部分构成:支撑装置、工作装置、换向装置、主传动。抹灰机通过工作装置完成抹灰与振动压实的工作,以泵送方式向工作装置输料,电机驱动抹灰螺旋叶片从而将灰浆涂抹至墙体,同时完成给料、涂抹灰浆与抹平的工作;与此平面垂直的平面是振动压实板,它通过激振装置提供激振力,将涂抹至墙面的灰浆振动压实。
工作装置下端由套筒连接在光杆上,工作装置上端下表面由卡在弧形内凹槽内可以滑动的内螺纹套筒连接在螺杆上,螺杆由电机驱动旋转,驱动工作装置水平运动,如图2所示。
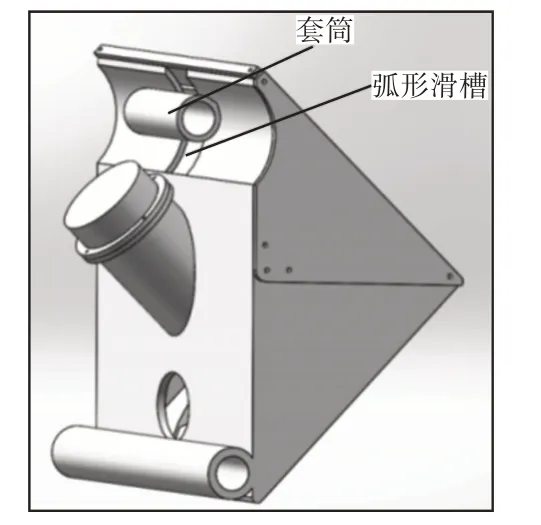
图2 工作装置下端连接处示意图Fig.2 Schematic Diagram of Lower End Connection of Working Device

图3 换向机构示意图Fig.3 Diagram of Commutation Mechanism
光杆与螺杆安装在换向机构上,换向机构由电机驱动主齿轮与两个从动齿轮啮合,如图3所示。从动齿轮转向相反,轴心处安装带螺纹的轴,两根轴螺纹旋向相反,换向臂一端有内螺纹的套筒连接在螺纹轴上,另一端连接光杆与螺杆,当电机转动时,机构带动两根换向臂同时向相反方向运动,螺杆与弧形凹槽内可以滑动的内螺纹套筒连接,完成换向运动。
主传动由电机驱动两对齿轮与一组齿轮齿条啮合,齿轮齿条中齿轮为主传动箱内最后一个齿轮,与之啮合的齿条在立柱上,由电机驱动整个机构完成垂直方向运动。
支承装置由底座、立柱、顶升机构组成,用于整机的支承与定位。顶升机构在工作时可根据需求进行顶升工作,与房顶接触形成适当压力以固定整机,顶杆与顶板间以万向节连接,以适应非水平房顶。螺杆、光杆、立柱与底座均为可拆装、拼接的结构,以适应工作时需要面对的各种不同尺寸的墙体,而且便于携带。
抹灰机部分设计参数,如表1所示。
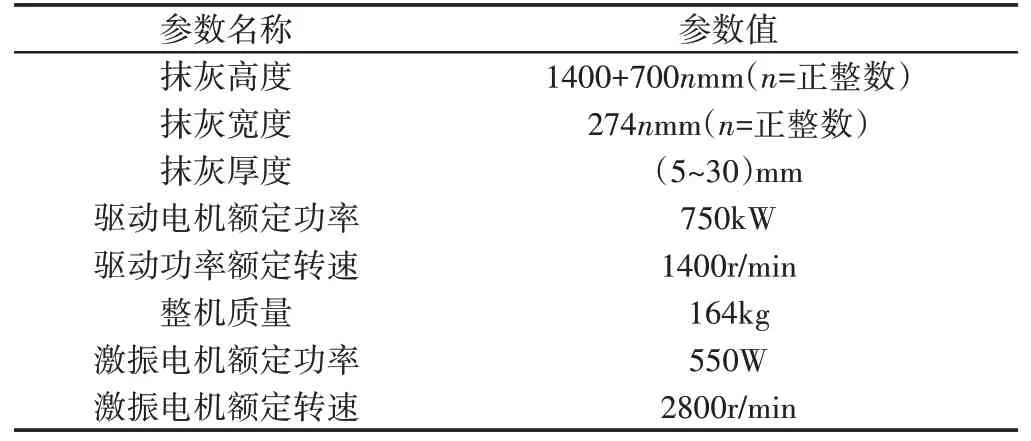
表1 抹灰机部分设计参数Tab.1 Design Parameters of Plastering Machine
2.2 建立抹灰机-灰浆动力学模型
为研究抹灰机在振动压实时的动力学特性,首先需要建立抹灰机-灰浆动力学模型[5-10]。
抹灰机在进行振动压实灰浆的过工作程中,压实板的运动规律可以用质量-弹簧-阻尼系统模型描述砂浆的振动作用,所得抹灰机-灰浆动力学模型,如图4所示。

图4 抹灰机-灰浆动力学模型Fig.4 Dynamics Model of Plaster-Mortar
图中:mz—压实板的质量;ms—随振灰浆的等效质量;xzx—压实板的水平方向位移;xzy—压实板的竖直方向位移;xsx—灰浆的水平方向位移;xsy—灰浆的竖直方向位移;F0—激振力幅值;kz—压实板的刚度;ks—灰浆刚度;ω—压实板激振频率;cz—压实板的阻尼;cs—灰浆的阻尼。
通过动力学模型,建立数学模型。以模型中集中质量的静平衡位置为坐标原点,根据力的平衡关系,可得方程组如下,对于水平方向(1)与竖直方向(2)分别为:

接下来分别对水平方向与竖直方向将动力学方程以状态方程的形式表示。设状态向量:

代入方程组,则水平方向与竖直方向状态方程分为:
3 相关参数的确定与求解
由于数学模型中除响应外存在未知参数,故需对未知参数进行求解以完成仿真。激励给定的情况下,还需求得压实板与灰浆的刚度与阻尼。
3.1 压实板与灰浆的刚度
结构或材料发生弹性变形的难易程度的表征就是刚度,它是指结构或材料在受力时抵抗弹性变形的能力。刚度在宏观弹性范围内是零件荷载与位移成正比的比例系数,即引起单位的位移所需的力。刚度是使物体产生单位变形所需的外力值。材料的刚度通常用弹性模量E来衡量。刚度与物体的材料性质、几何形状、边界支持情况以及外力作用形式有关。
刚度分为静刚度与动刚度,静载荷下抵抗变形的能力称为静刚度。动载荷下抵抗变形的能力称为动刚度,即引起单位振幅所需的动态力。如果干扰力变化很慢,干扰力的频率远小于结构的固有频率,动刚度与静刚度基本相同。
模型的刚度通过计算获得。有限元法能够获得每个单元的位移与应力,分别用不同颜色表示出来,云图左边可以得到具体数值,并计算每个单元格的刚度。刚度计算公式:

系统动力学模型为质量-弹簧-阻尼模型,每个单元之间是并联关系,并联系统总体刚度为每个单元刚度之和,通过有限元分析法,得到灰浆与压实板在载荷下的等效应力云图与形变云图,从而计算其刚度,计算方法为:

设置结构材料时所需参数,如表2所示。由于激振装置提供的动力为正弦力,对模型进行谐响应分析。谐响应分析是指在承受正弦规律变化的载荷时,计算结构受迫振动的稳态响应,谐响应分析的意义是为了得到结构在给定幅值的一段频率下的响应所对应的该频段的结构位移。

表2 压实板的各项参数Tab.2 Various Parameters of Compacted Plate
设置载荷为幅值1510N的激振力,选取即将仿真的50Hz下的结构响应,单元类型为实体Solid186(3D20N),所得云图,如图5~图8所示。

图5 随振砂浆总形变云图Fig.5 Total Deformation of Vibrating Mortar

图6 随振砂浆等效应力云图Fig.6 Equivalent Stress Nephogram of Vibrating Mortar
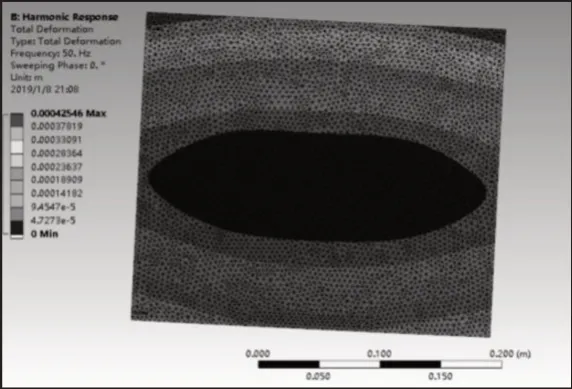
图7 压实板总形变云图Fig.7 Total Deformation Nephogram of Compacted Plate

图8 压实板等效应力云图Fig.8 Equivalent Stress Nephogram of Compacted Plate
通过有限元分析得到工况下各单元的应力与位移数据,由图可得灰浆与压实板在幅值为1510N的正弦激振力下50Hz时,结构每一个单元的等效应力与等效位移,由于其为并联形式,刚度为每个单元格结构刚度之和。不同区域受的应力与位移分别以不同颜色表示在图中,并在图左侧显示具体数值,根据式(5)和式(6)分别计算不同区域的ki并相加得到总体刚度。由于需计算区域数量较大这里直接给出结果,经计算得压实板与灰浆的刚度约分别为:kz=1.01×1010N/m,ks=21828.576N/m。
3.2 压实板与灰浆的阻尼
阻尼指的是任何振动系统在振动中,由于外界作用或系统本身固有的原因引起的振动幅度逐渐下降的特性,以及此特性的量化表征。
力的衰减是阻尼的物理意义,通俗地讲,就是阻止物体继续运动。
通过计算其临界阻尼,从而计算阻尼:

振动压实板选用材料为q235钢,根据经验其阻尼比取值范围为ζ=0.01~0.05,此时设定其阻尼比为ζz=0.03。
灰浆的阻尼比通过实验得到阻尼比与抗压强度数据,如表3所示。
对其进行曲线拟合,通过曲线可根据选用材料的抗压强度计算出其阻尼比,实验得到阻尼比与抗压强度数据所的拟合曲线方程为:

由于选用灰浆材料的抗压强度为20MPa,计算得灰浆阻尼比为ζs=3.6672。
由公式经计算可得,压实板与灰浆的阻尼分别为:Cz=1376.67,Cs=11883.3。
对系统的动力学模型方程组进行拉普拉斯变换,得到其水平方向(10)与竖直方向(11)传递函数分别为:

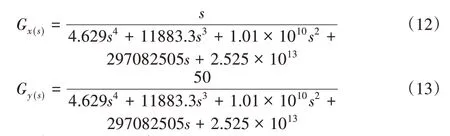
求得的各项参数如表4所示,将计算所得各项参数结果代入式(10)与式(11)中,计算后得到系统的水平方向与竖直方向传递函数为式(12)与式(13)。

表4 传递函数各项参数Tab.4 Parameters of Transfer Function
4 仿真分析与参数优化
4.1 仿真分析
MATLAB中有一种可视化仿真工具—Simulink,它是一种基于MATLAB的框图设计环境,它是实现动态系统建模、仿真和分析的一个软件包。
Simulink提供一个动态系统建模、仿真以及综合分析的集成环境,它具有适应面广、结构和流程清晰及仿真精细、贴近实际、效率高、灵活等优点。
用matlab simulink对振动压实进行仿真[11-12],系统激励为激振力幅值,响应分别为位移、速度,加速度,将传递函数利用simulink进行仿真,如图9所示。
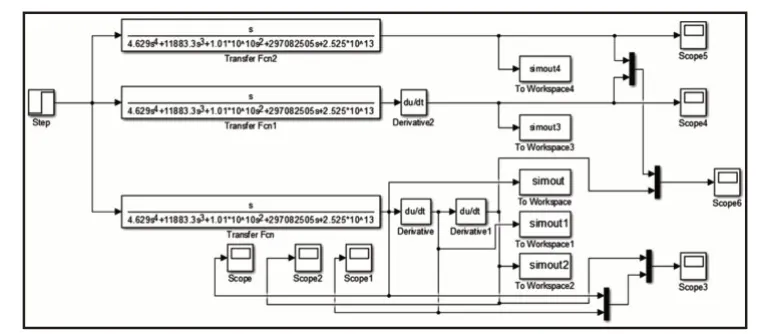
图9 Simulink系统仿真图Fig.9 Simulink System Simulation Diagram
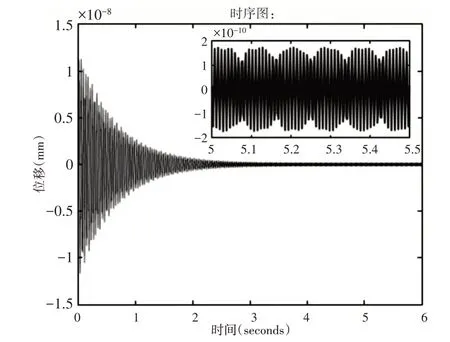
图10 水平方向时间-位移曲线图Fig.10 Horizontal Time-Displacement Curve
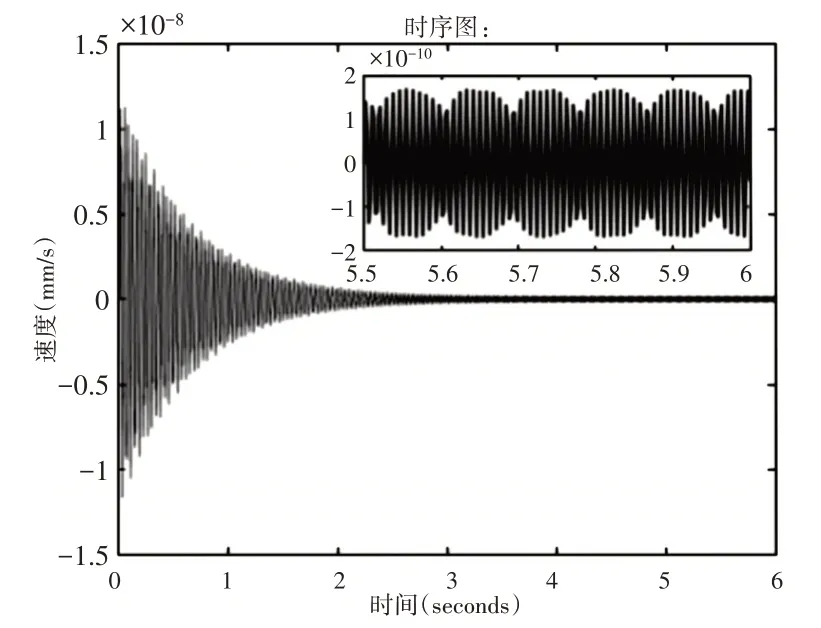
图11 水平方向时间-速度曲线图Fig.11 Horizontal Time-Velocity Curve
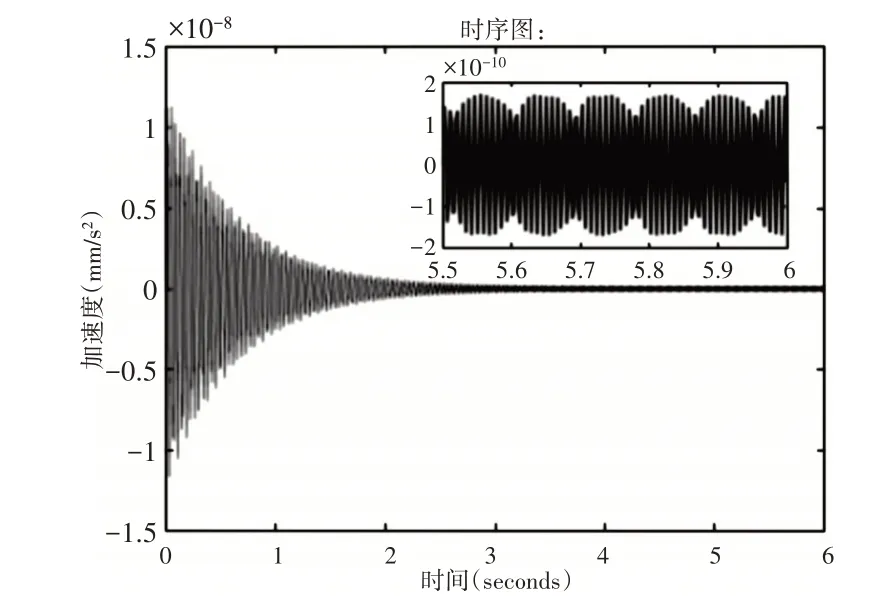
图12 水平方向时间-加速度曲线图Fig.12 Horizontal Time-Acceleration Curve
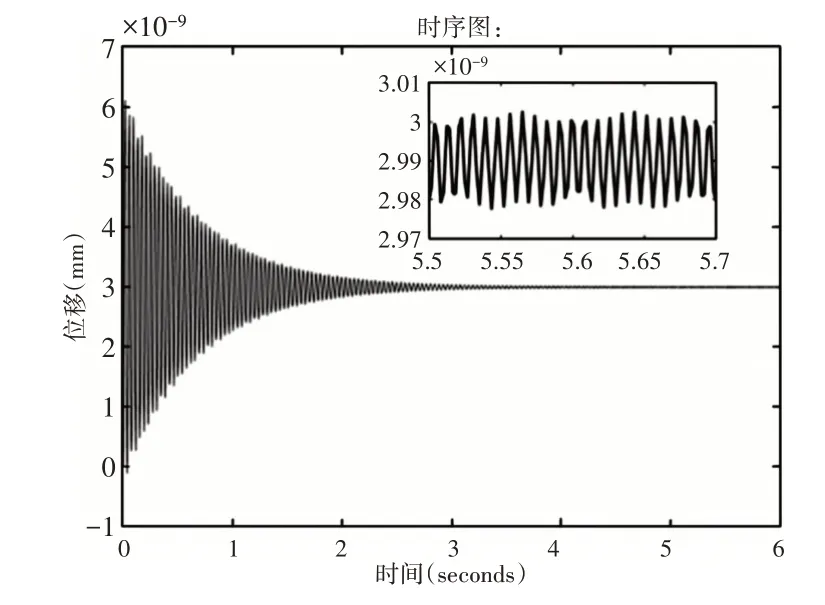
图13 竖直方向时间-位移曲线图Fig.13 Vertical Time-Displacement Curve

图14 竖直方向时间-速度曲线图Fig.14 Vertical Time-Velocity Curve

图15 竖直方向时间-速度曲线图Fig.15 Vertical Time-Velocity Curve
根据模型建立与设定的激励和响应,其三种响应应在一定时间后收敛从而达到稳定状态。以水灰比1:2.5时激振力为1510N为例,输入激励,得到水平方向与竖直方向的时间位移曲线、时间速度曲线以及时间加速度曲线,如图10~图15所示。图像右上角为响应曲线稳定状态的局部放大图。响应均在一定的时间后呈现收敛状态,证明了所建立模型的正确性。将状态方程式(3)、式(4)封装入simulink系统,所得结果与图10~图15一致。
4.2 参数优化
当振动压实的响应衰减掉幅值的95%,到达幅值的5%及以下时,系统达到稳态,振动压实完成,系统从开始到达稳态所需的时间称为过渡时间。当三种响应皆达到5%时,系统达到稳态。以水灰比1:2.5时激振力为1510N为例,由仿真结果所得simout数据表可得,水平方向振动开始后3.6s到达稳态,竖直方向3.4s到达稳态,则系统3.6s后到达稳态,过渡时间为tp=3.6s。为寻求最优振动压实效果,将其推广到多种水灰比的灰浆,调整多组参数并输入不同的激励进行仿真,分析其振动压实的效果,最终得到的数据对比,如表5所示。通过此方法得到三种水灰比的灰浆在不同激振力与角速度的组合下的最优过渡时间,提高灰浆振动压实效率,对实际工作与生产具有指导意义。压实板的高度为278mm,墙面高度一般2.7m左右,通常情况下,普通抹灰机工作效率一般为1m²/min。以ω=50、激振力幅值为F0=1510N为例,根据压实板过渡时间,压实板竖直方向行走速度为77.2mm/s,故将单个压实板宽度的墙面从上至下完成压实的时间为34.9s,工作效率为1.272m²/min,能够以较高效率完成压实工作。
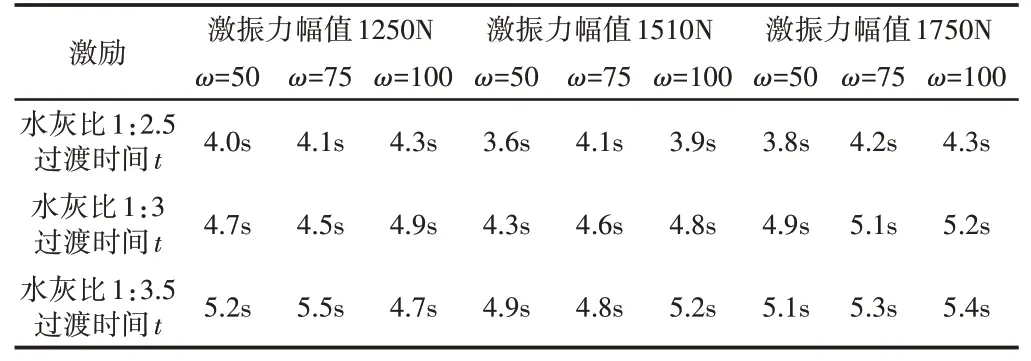
表5 各参数组合下过渡时间对比Tab.5 Transition Time Comparison of Various Parameter Combinations
5 结论
(1)根据工作时的机械结构简化与受力分析,建立其动力学模型,并得到系统传递函数,通过有限元法计算出结构的刚度;通过计算得到阻尼;各项参数代入传递函数后利用matlab simulink仿真,通过仿真结果证实了模型的正确性。(2)将仿真推广到三种水灰比时多组参数组合进行,得到各种参数组合下最优振动压实过渡时间,对生产具有指导意义。(3)以其中一组参数为例,根据过渡时间计算出压实板所需的工作时间,可知压实板能够以较高的效率在短时间内完成墙面灰浆的压实工作。
猜你喜欢
硅酸盐通报(2022年9期)2022-10-10 11:11:12
建材发展导向(2022年3期)2022-04-19 12:51:14
建材发展导向(2021年19期)2021-12-06 03:20:24
建材发展导向(2021年13期)2021-07-28 07:15:36
数学物理学报(2021年3期)2021-07-19 06:02:32
数学年刊A辑(中文版)(2021年2期)2021-07-17 08:38:02
建材发展导向(2021年9期)2021-07-16 07:11:04
数学物理学报(2021年2期)2021-06-09 08:54:38
江苏建材(2021年3期)2021-03-30 15:34:41
江西建材(2018年4期)2018-04-10 12:36:50
