基于总体经验模态分解的桥梁动态位移重构∗
2021-06-26 11:19:32陈云鹏邹应全
振动、测试与诊断 2021年3期
刘 鹏,陈云鹏,邹应全,2
(1.西南交通大学信息科学与技术学院 成都,611756)(2.中铁第一勘察设计院轨道交通工程信息化国家重点实验室 西安,710043)
引言
加速度传感器凭借较宽的频带响应、体积小、便于安装和低成本等特点,在桥梁动态位移测量方面得到了广泛应用[1]。加速度传感器采集桥梁结构的加速度信号,通过对加速度幅值二次积分计算位移。积分计算位移的方法主要分为频域积分和时域积分两种。频域积分首先将加速度时域信号通过快速傅里叶变换(fast Fourier transform,简称FFT)变换到频域,利用频域中的积分性质进行二次积分计算,通过对位移频域信号快速傅里叶逆变换得到位移时域信号。为了消除低频趋势项和高频噪声对积分过程的影响,通常会在频域中进行滤波处理。但是频域滤波存在截止频率选择和截断误差问题,在原始信号频谱未知情况下易产生较大位移计算误差[2]。时域积分避免了截止频率选择等问题,但采用MEMS技术的加速度传感器在时域进行二次积分后,位移信号会严重偏移甚至得到错误的结果。因为MEMS 加速度传感器的输出信号缺乏初始条件,且存在直流分量、零点漂移、长周期干扰和温漂等,这些因素所造成的误差会随积分放大[3‐4]。因此,研究如何有效地滤除加速度信号中的这些趋势项以及确定边界值是时域积分的重要环节。
Kandula 等[5]提出了一种加速度信号模型,它是指数阻尼正弦信号的和,通过对无噪声加速度进行建模,然后二次积分得到振动位移,这种方法可以忽略初始加速度与初始速度边界条件,并且计算精度较高;然而该方法涉及到较大数据集的矩阵逆运算,复杂度高,计算时间过长。文献[6]利用结构的振动规律,在稳态振动阶段寻找速度和位移的零点,解决了积分边界值问题,最后利用趋势项处理消除了积分漂移的影响;但该方法的缺点在于要先识别稳态振动阶段,如果结构复杂,则识别准确度较差,甚至无法识别。文献[7]提出了基于FFT 时频转换和经验模态分解(empirical mode decomposition,简称EMD)自适应滤波相结合的积分变换方法,该方法为获取位移信号提供了新的途径,但是积分过程是在频域中进行的,存在频率截断误差和截止频率的选取问题,而且EMD 分解会产生模态混叠现象和端点效应。文献[8]采用总体经验模态分解方法(ensemble empirical mode decomposition,简 称EEMD)和EMD 方法对液压泵泵壳振动数据进行分解重构,结合短时最大熵谱分析选取对故障最为敏感的固有模态函数(intrinsic mode function,简称IMF)分量,采用模糊C 均值聚类算法进行故障模式识别,识别结果表明,EEMD 相比较于EMD,迭代次数大幅减小,故障识别率也有显著提高。
笔者采用EEMD 方法对桥梁振动加速度信号、速度信号及位移信号逐次分解重构,有效地消除了积分计算过程中高频噪声和低频趋势对积分过程造成的干扰,获得了满足计算精度的动态位移信号。
1 加速度积分与EEMD 算法
1.1 加速度积分原理
速度是加速度的一次积分

位移是速度的一次积分

将式(1)代入式(2)得到位移积分计算公式

为了方便在计算机中处理计算,加速度积分离散形式(梯形积分公式)为

速度与初始速度以及加速度的离散关系式为

位移与初始位移以及速度的关系式为

将式(5)代入式(6)得位移积分离散关系式为

式(4)~(7)中Δt是计算位移的一个重要参数,它代表加速度采样时间间隔,与采样频率互为倒数。当Δt越小时,采样频率越高,式(4)积分运算结果与数值运算结果越近似。在实际中设置采样频率为文献[1]的2~5 倍,本试验中采样频率为1 kHz,保证精度要求。
如式(7)所示,位移与初始位移以及初始速度有关。其中初始位移是以常量叠加的形式影响最终位移结果,而初始速度是与时间作为一次函数的关系影响最终位移结果。随着时间的增加,累计误差也越大。另外,由于MEMS 加速度传感器自身因素和采集系统的零点漂移造成的低频干扰会经积分放大,因此通常采用低通滤波、平滑滤波等滤波处理来减小以上现象造成的影响。但是滤波处理局限性太大,截止频率选取困难,因此需要一种自适应处理方法,而总体经验模态分解正是一种基于经验的数据分析方法。该方法依据信号自身的时间特征尺度进行分解,每个IMF 分量都有不同的时间特征尺度,可以根据不同的时间特征尺度来筛选,从而筛除不需要的分量,达到自适应滤波的目的。
1.2 总体经验模态分解
EEMD 是在EMD 算法上发展而来的,EMD 是希尔伯特‐黄变换(Hilbert‐Huang transform,简称HHT)的核心算法[9]。EMD 算法的目的在于将非平稳、非线性的信号分解为一组稳态和线性的IMF,且IMF 满足以下性质:
1)信号的极值点Ne和过零点NZ数目相等或最多相差一个

2)任意一点,由局部极大值定义的包络Smax(t)和由局部极小值定义的包络Smin(t)的均值为0

但是EMD 也存在不足,用EMD 分解得到的IMF 分量存在模态混叠现象与端点效应。模态混叠体现在不同的IMF 分量出现相同的尺度信息,此时低频分量可能与有效信息混叠在一起,造成IMF分量选取困难,积分放大后造成严重偏移。端点效应伴随每一次筛选过程,会在运算过程中逐渐放大,因此会对整个数据序列产生影响。为了克服这些问题,WU 等[10]提出了EEMD 方法:将频率不同的白噪声序列添加到目标数据中,当附加的白噪声均匀分布在整个时频空间时,该时频空间就由滤波器分割成的不同尺度成分组成。不同尺度的信号会自动投影到由白噪声建立的合适的参考尺度上,可以有效地解决模态混叠现象与端点效应。虽然每个试验可能产生非常嘈杂的结果,但在试验样本足够大的情况下,平均后的噪声将基本消失[11]。EEMD 作为EMD 算法的改进,包括以下几个步骤:
1)添加一个白噪声序列到目标数据中

2)把添加白噪声的数据分解成多个IMF 分量

3)重复步骤1 和2,目标数据中加入与步骤1 不同的白噪声序列

4)获得分解的对应多个IMF 的(总体)均值作为最终结果

其中:N为总体个数;K为IMF 分量个数。
通过EEMD 将原始信号分解成多个IMF 分量,每个IMF 代表原始信号的一种内部模态,因此可以选取试验所需要的模态分量进行分析处理,从而达到自适应数据处理的目的。
2 桥梁模拟信号仿真试验
2.1 Matlab 仿真模拟桥梁振动加速度信号
通常桥梁动态响应振动信号的频率为1~10 Hz,所以本研究构造理想位移信号为

根据加速度a是位移s的二次微分关系可得,理想加速度信号为

通过Matlab 构建理想的加速度信号,并在此基础上添加高斯分布的随机白噪声,如图1 所示。
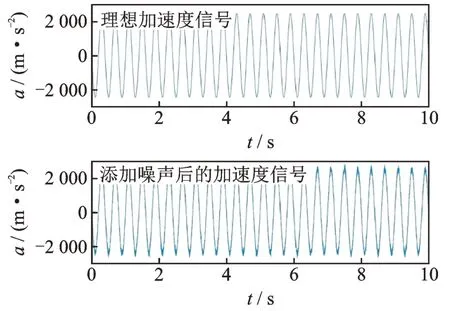
图1 加速度信号图Fig.1 Acceleration signal diagram
分别用基于频域带通滤波处理方法[12]、EMD自适应滤波方法[13]、基于FFT+EMD 滤波处理方法[7]和EEMD 自适应滤波方法,对加入噪声的加速度信号进行处理,以求得到理想的位移信号。
2.2 基于频域带通滤波处理
图2 为基于频域带通滤波处理的方法流程图,首先对加速度时域信号进行FFT 处理,转换成对应的频域信号,然后在频域设置理想的带通滤波器H(f)对加速度频域信号进行滤波处理

图2 基于频域带通滤波处理流程图Fig.2 Flow field based on frequency domain bandpass pro‐cess

由于桥梁振动模拟信号频率为2.5 Hz,设置f1=1 Hz,f2=10 Hz。对滤波处理后的加速度频域信号进行频域内的二次积分,得到位移频域信号,然后对位移频域信号进行快速傅里叶逆变换(invert fast Fourier transform,简称IFFT)处理得到位移时域信号。从图3 可看出,基于频域滤波的处理方法没有相移现象,但由于频率截断误差等原因,在信号的0~2 s 和8~10 s 与理想信号存在一定的误差。
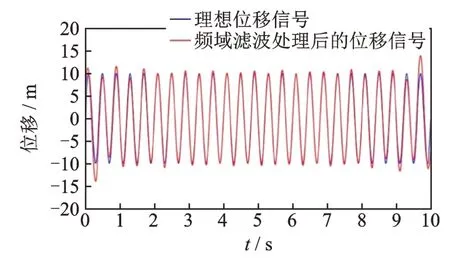
图3 频域滤波处理后的位移信号和理想位移信号Fig.3 Displacement signal after frequency domain filtering and ideal displacement signal
2.3 基于EMD 自适应滤波处理
图4 为基于EMD 自适应滤波处理方法的流程图,其中:a为采样到的原始加速度信号;a'为经过分解重构处理后的加速度信号;v为积分得到的速度信号;v'为经过分解重构处理后的速度信号;s为积分得到的位移信号;s'为经过分解重构处理后的位移信号。
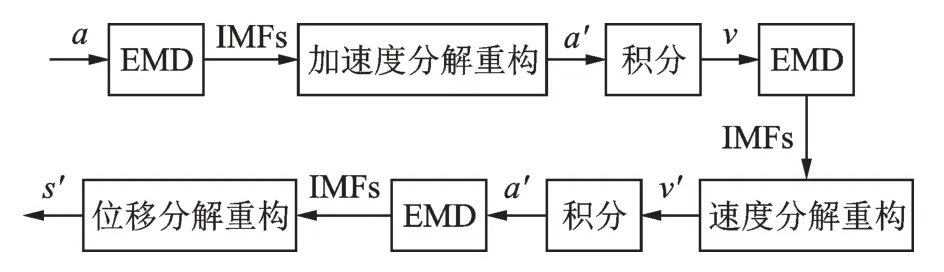
图4 基于EMD 自适应滤波处理流程图Fig.4 Flow field based on EMD adaptive filtering process
如图5 所示,EMD 自适应滤波处理方法得到的位移结果,在1.5~7 s 与理想信号几乎重合;但是其他时间段由于模态混叠现象和端点效应,与理想位移信号相差较大,总体效果不理想。
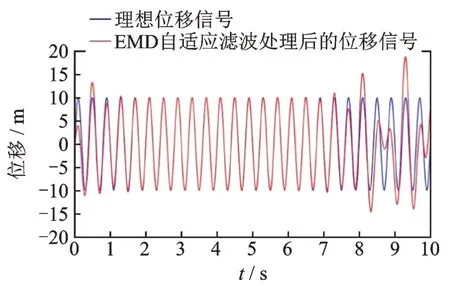
图5 EMD 滤波处理后的位移信号和理想位移信号Fig.5 Displacement signal after EMD adaptive filtering andideal displacement signal
2.4 基于FFT+EMD 滤波处理
从图6 可以看出,基于FFT+EMD 滤波处理方法原理和基于频域滤波处理的方法类似,只是对IF‐FT 得到的位移时域信号进行了一次EMD 自适应滤波处理。
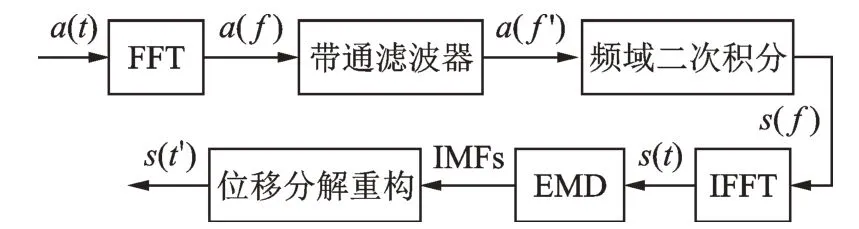
图6 基于FFT+EMD 滤波处理流程图Fig.6 Flow field based on FFT+EMD adaptive filtering proces
如图7 所示,相比较于基于频域滤波处理和基于EMD 自适应滤波的方法,基于FFT+EMD 滤波处理方法得到的位移信号和理想位移信号重合时间更长。虽然0~1s 和9~10s 的波形存在一定失真,但整体效果比前面2 种方法都要好。
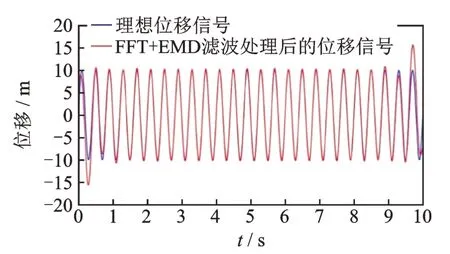
图7 基于FFT+EMD 滤波处理后的位移信号和理想位移信号Fig.7 Displacement signal after FFT+EMD adaptive filter‐ing and ideal displacement signal
2.5 基于EEMD 自适应滤波处理
基于EEMD 自适应滤波方法原理与基于EMD自适应滤波方法类似,只是用EEMD 替代EMD,流程图如图8 所示。
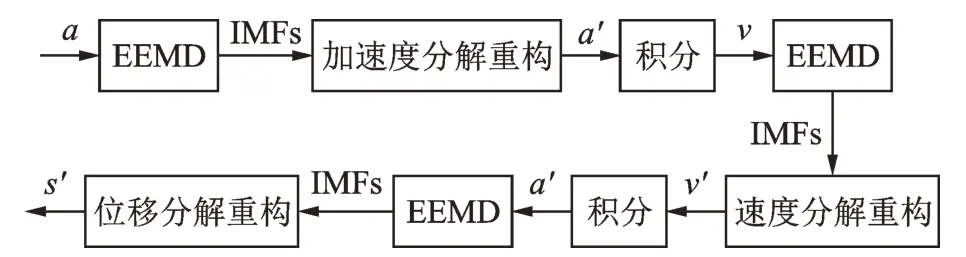
图8 基于EEMD 自适应滤波处理流程图Fig.8 Flow field based on EEMD adaptive filtering process
如图9 所示,在整个时间段内EEMD 滤波处理后的位移信号和理想位移信号都高度重合,整体效果比前面3 种方法都要好,体现了基于EEMD 自适应滤波方法的有效性。

图9 EEMD 自适应滤波处理后的位移信号和理想位移信号Fig.9 Displacement signal after EEMD adaptive filtering and ideal displacement signal
2.6 积分结果误差分析
分别计算频域带通滤波、基于EMD 自适应滤波、基于FFT+EMD 滤波、基于EEMD 自适应滤波相对于理想信号均方根误差、峭度误差及相位误差,见表1,其中1~4 依次对应上述4 种方法。EEMD自适应滤波方法均方根误差和峭度误差都在2%以下,相位误差小于2.1°,满足计算精度。这说明对于低频加速度信号的积分处理问题,较之其他3 种方法,EEMD 自适应滤波方法所得的结果精度更高。

表1 积分结果误差分析表Tab.1 Analysis table of integral result error
3 振动台数据采集试验
采用多通道振动数据同步采集系统对振动台振动加速度信号进行采集,分别用基于频域带通滤波、基于EMD 自适应滤波、基于FFT+EMD 滤波和基于EEMD 自适应滤波处理4 种方法进行振动动态位移重构,将得到的位移信号与振动台给出的参考位移进行对比,来检验基于EEMD 自适应滤波方法位移重构的有效性。
3.1 基于振动台的数据采集及算法验证试验
图10为振动台实物图,从图中可以看出,基于振动台的数据采集及算法验证试验主要设备有:双轴振动台;三轴MEMS加速度传感器;振动台变频控制器;多通道加速度采集系统;以太网线连接的上位机。
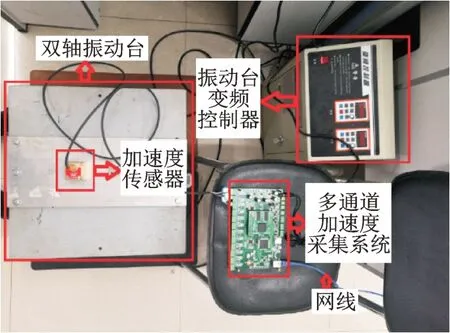
图10 振动台实物图Fig.10 Vibration table physical map
振动加速度信号由振动台给出,通过振动台变频控制器控制一对偏心轮实现垂直与水平二维变频振动控制,以此来产生不同维数与幅度的振动模拟量。在试验中设置振动频率为9 Hz,根据振动台手册得知振幅为1 mm。三轴MEMS 加速度传感器采集振动台振动的加速度,通过多通道加速度采集系统将加速度信号传输到上位机。在上位机平台上用上述4 种方法实现振动台位移重构,并对不同方法进行比较分析。
图11 为振动台加速度信号及频谱图。图中显示了振动采集系统以1 kHz 的采样频率持续采样10 s 的波形数据,频谱显示振动台信号的频率主要集中在9 Hz,与振动台设置的振动频率参数一致。从加速度信号的频谱中可以直观地看到,存在幅度较大的低频分量。为了更好地过滤干扰因素,频域滤波处理过程中通带频率设置为5~30 Hz。

图11 采集到的振动台振动加速度及频谱Fig.11 Collected vibration table vibration acceleration and spectrum
3.2 振动台动态位移重构
图12 为分别采用前述的4 种方法对采样到的振动台加速度信号进行处理后得到的振动台动态位移信号的结果图。从频域图中可以看出,基于频域带通滤波处理、基于FFT+EMD 滤波处理和基于EEMD滤波处理这3 种方法都有效地滤除了小于1 Hz 的低频分量。但是由于模态混叠和端点效应,基于EMD滤波得到结果首尾两端有大幅度的失真,尤其是尾部失真后的幅值达到了有效信号的40倍以上。

图12 振动台动态位移重构的结果Fig.12 Reconstruction result of dynamic displacement of shaking table
为了对基于EMD 滤波处理的失真原因进行分析,图13 展示了加速度信号EMD 分解得到的IMF分量及频谱图。从图中可以看到,IMF3与IMF4的频段为9 Hz,与振动台振动频率相符。但是IMF3与IMF4出现了模态混合现象与端点效应,尤其是IMF4端点处的失真达到了有效信号的1.5 倍以上。误差经过积分后放大,这使得误差积分放大后造成严重偏移,直接影响经验模态分析的效果。
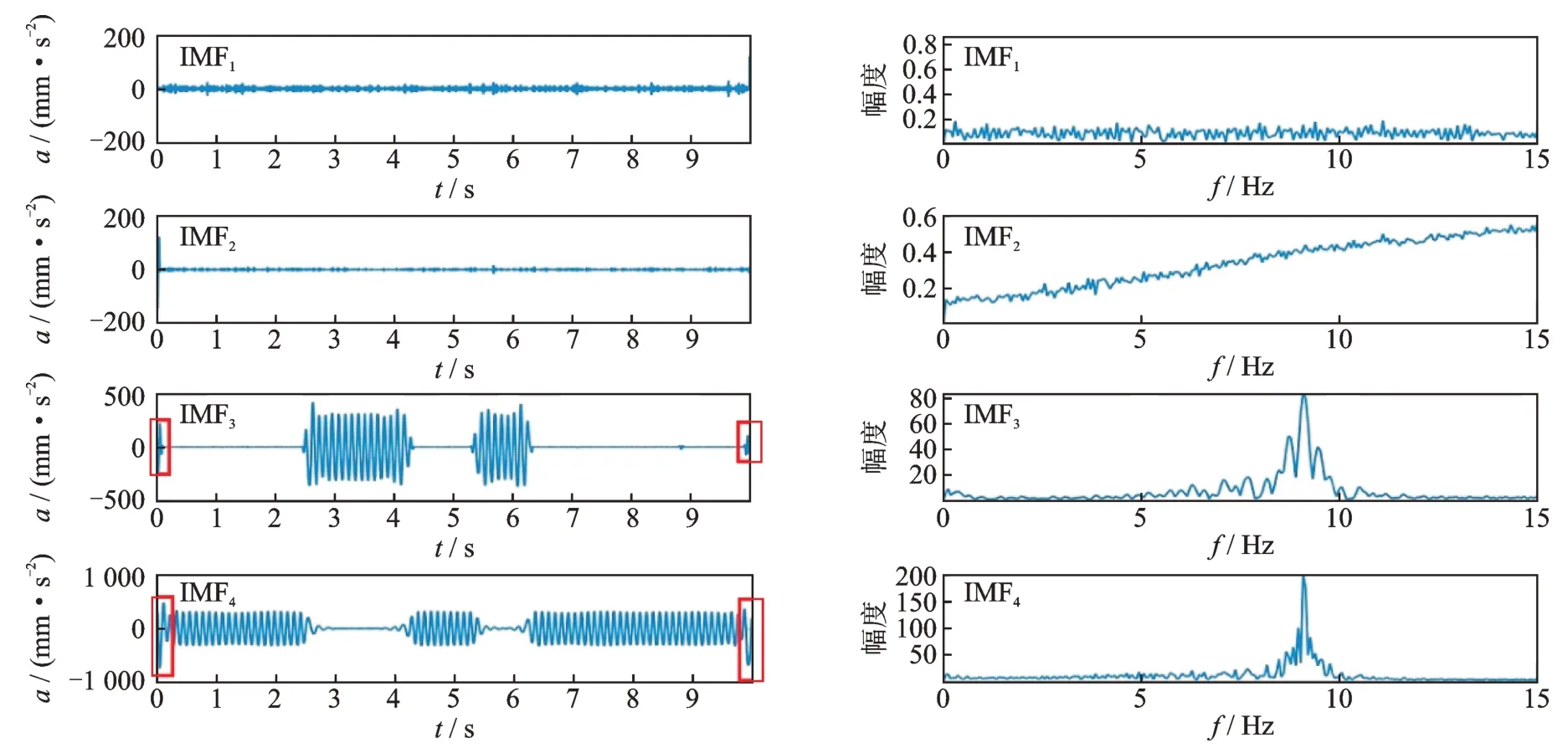
图13 加速度信号EMD 分解得到的部分IMF 分量Fig.13 Partial IMF component decomposed by acceleration signal EMD
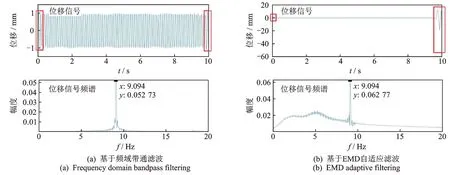
图14 为基于EMD 滤波处理得到的速度信号。该信号是将图13 中的IMF3和IMF4重构,得到滤波后的加速度信号a′,然后对a′进行积分得到的速度信号v。从图14 中可以看出,对于加速度信号的滤波处理没有有效地滤除低频分量。
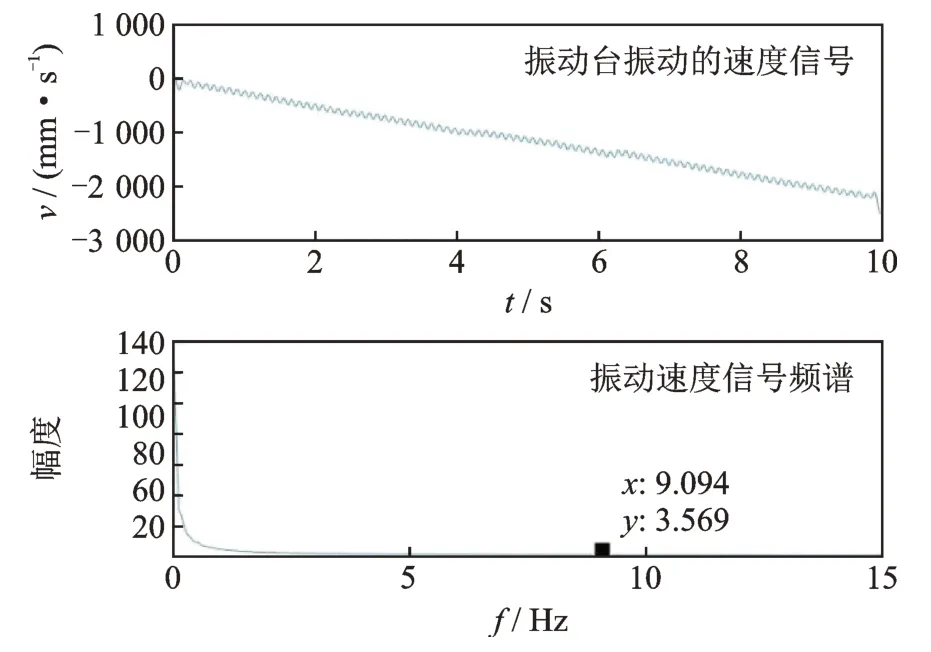
图14 基于EMD 滤波处理得到的速度信号Fig.14 Speed signal based on EMD filtering
对积分得到的速度信号EMD 进行分解,如图15所示。从图15 可以看出,IMF1为需要提取出的重构速度信号v′,但是由于端点效应,在信号的末尾处有大幅度的失真。从IMF1的频谱图可以看出,在EMD分解过程中发生了模态混叠,除了频率为9 Hz 的有效信号外,IMF1中混叠了一部分低频分量。端点效应和模态混叠想象所造成的误差会随着积分而放大。

图15 速度信号EMD 分解得到的部分IMF 分量Fig.15 Partial IMF component decomposed by speed signal EMD
对重构速度信号v′积分后得到位移信号s,如图16 所示。对图16 的位移信号进行EMD 分解,得到重构后的位移信号如图12(b)所示。可以看出随着积分的进行,EMD 端点效应和模态混叠所造成的误差在累计增大,基于EMD 滤波方法对实测振动信号进行处理效果并不理想。
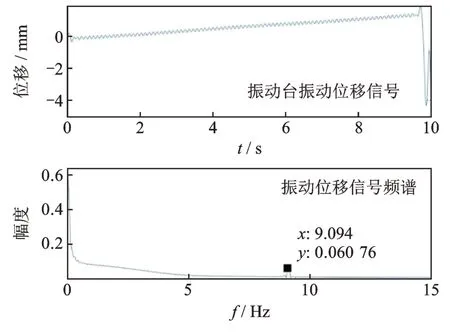
图16 基于EMD 滤波处理得到的位移信号Fig.16 Displacement signal based on EMD filtering
图17 为基于频域滤波处理的振动台位移信号EMD 分解得到的部分IMF 分量及频谱。该方法是想通过EMD 分解,滤除频域滤波过程中所产生的截断误差等干扰项,但是在EMD 分解的过程中发生了模态混叠,反而加大了误差。从图中可以看出,IMF1为重构后的位移信号。
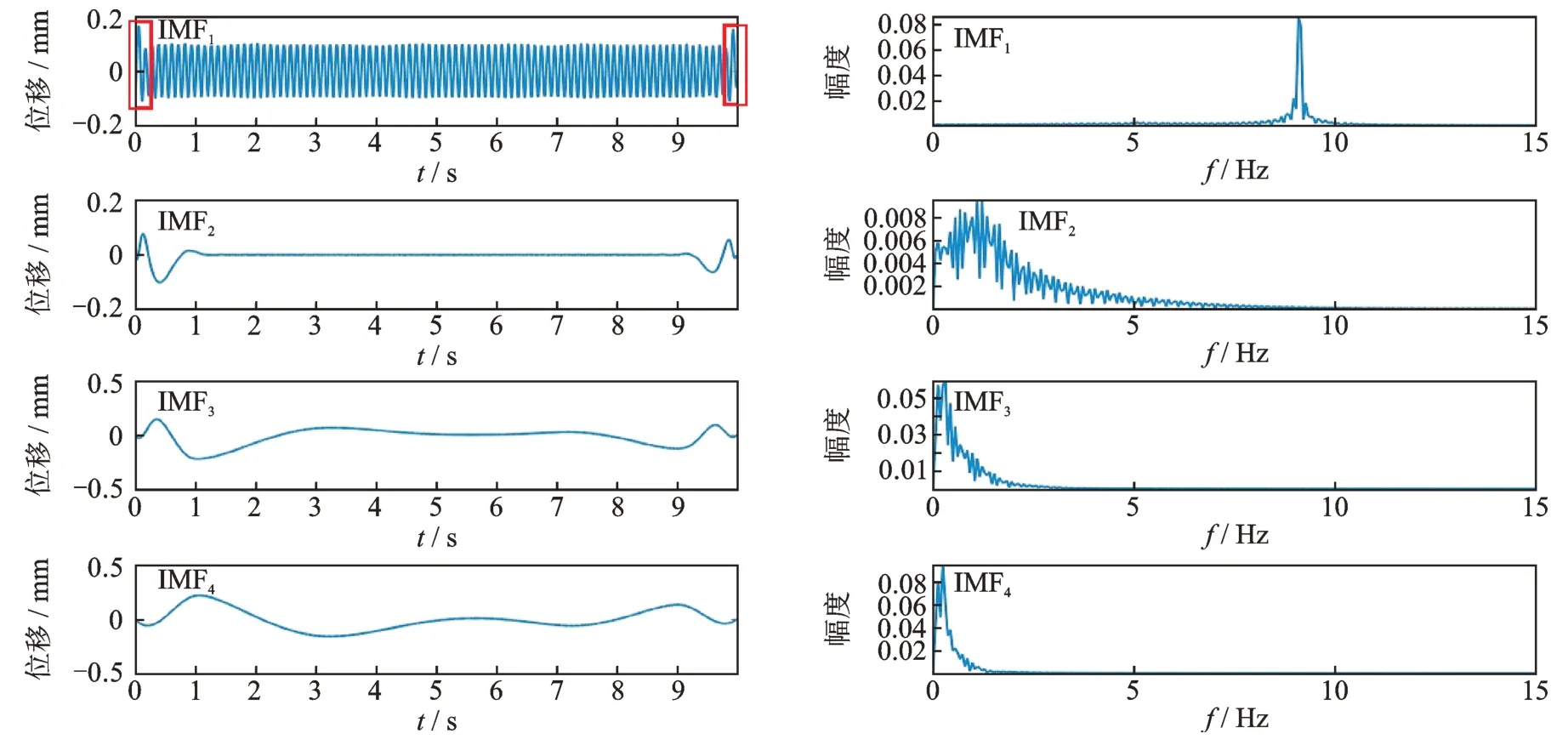
图17 基于频域滤波处理的振动台位移信号EMD 分解部分IMF 分量Fig.17 Partial IMF component of vibration table displacement signal EMD based on frequency domain filtering
综合来看,基于EEMD 自适应滤波处理方法得到的位移信号精度更高。通过对加速度信号、速度信号和位移信号采用EEMD 依次分解,剔除高频噪声和低频趋势项并进行重构,基本消除了原始振动台加速度信号中的高频噪声、低频趋势项以及直流分量的影响。从数据结果图可以看出,振动台以9 Hz 频率振动时的动态位移峰峰值为2 mm,与振动台手册给出的一致,验证了此算法重构位移的有效性。
4 桥梁实地试验结果分析
4.1 公路高架桥梁的数据采集及算法验证试验
试验测试场地选用一座高约15 m 的公路高架桥梁。通过对桥梁结构分析,当车辆通过时,桥梁跨中振动幅度最大。因此,本次试验选择在桥梁跨中安装三轴MEMS 加速度传感器。试验中,结合视频录像分析不同类型车辆经过时产生的不同桥梁动态响应。
图18 为桥梁现场数据采集环境搭建示意图,图19 为桥梁现场数据采集实物图。桥梁现场数据采集环境搭建包括三轴MEMS 加速度传感器、振动数据采集系统、锂电池、工控机、4G 路由器和便携式TFT 屏等。三轴MEMS 加速度传感器将桥梁的振动加速度信号转换成电压信号,振动数据采集系统对电压信号进行采样,在内部实现A/D 转换,并通过以太网将采样数据传输至工控机中保存。现场有便携式TFT 屏可以实时查看系统运行状态,工控机通过4G 路由器连接网络,通过远程电脑进行监控。

图18 桥梁现场数据采集环境搭建示意图Fig.18 Schematic diagram of bridge site data collection environment
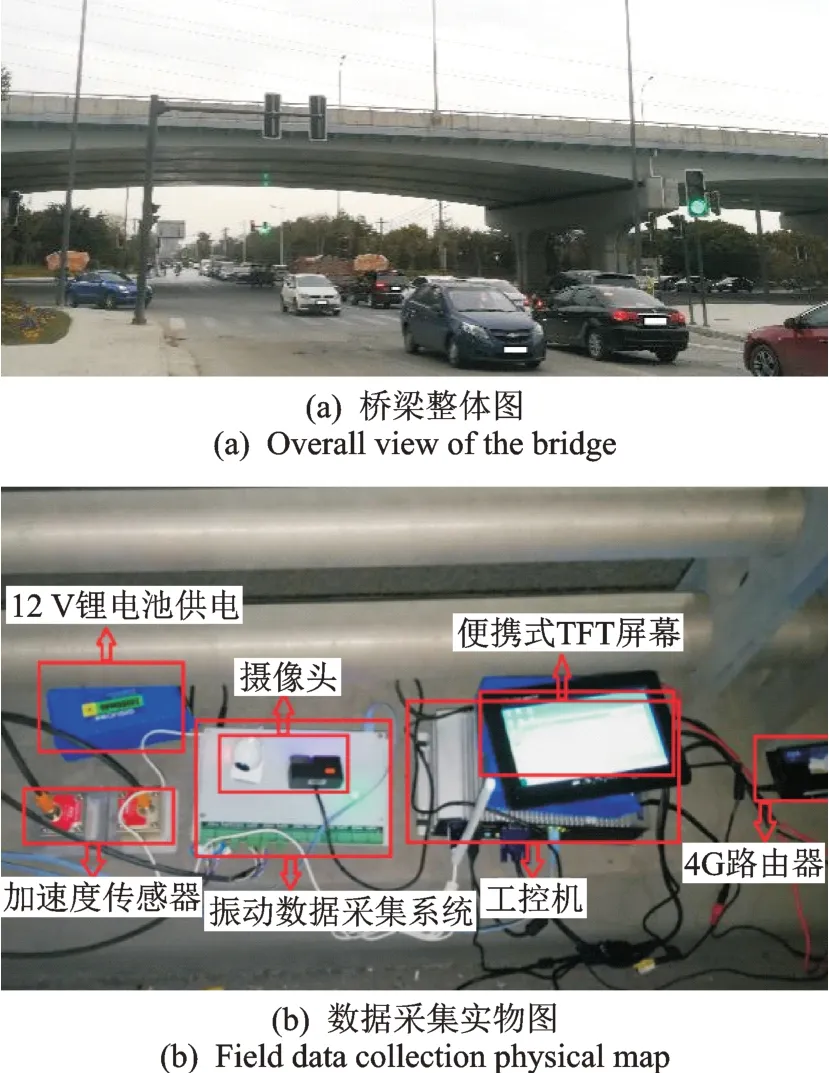
图19 桥梁现场数据采集实物图Fig.19 Bridge site data collection physical map
结合摄像头录制的视频,重点选取有重载货车与大型运渣卡车经过时引起的桥梁动态振动位移,这时桥梁的动态位移较大,从中获取的结构行为特征较为明显。根据桥梁动态位移、车辆类型、行驶速度及道路粗糙条件等,可以建模获得动态交通荷载下短跨、中跨桥梁疲劳应力,从而对桥梁的疲劳可靠性进行评估[14]。
图20 为截取的一段时长为60 s 的桥梁振动加速度信号及频谱。从图中可以看出,桥梁振动加速度信号频率为2.487 Hz,且存在幅值较高的低频直流分量,所以本次试验在频域滤波处理过程中通带频率设置为1~30 Hz。
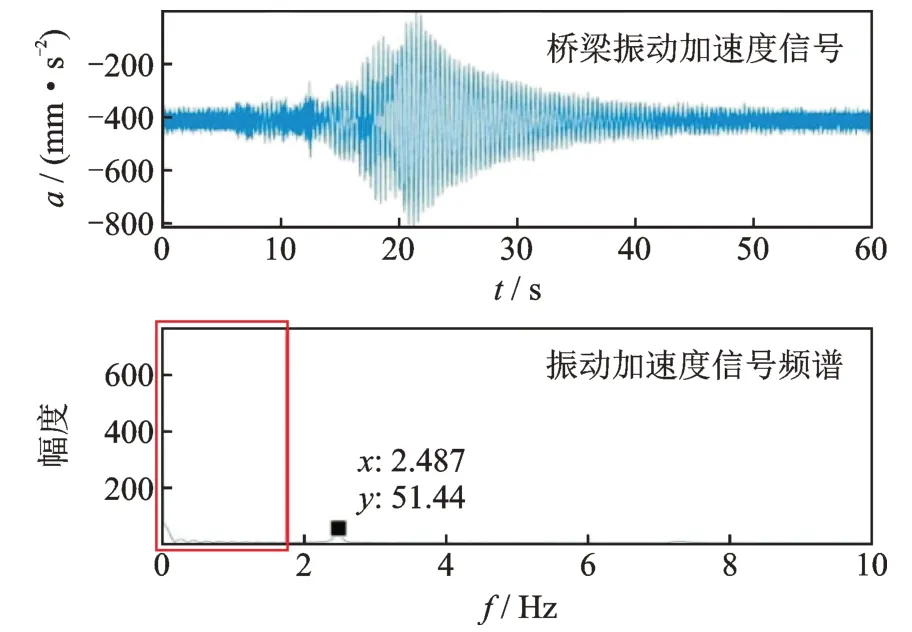
图20 桥梁振动加速度信号及频谱Fig.20 Bridge vibration acceleration signal and frequency do‐main spectrum
4.2 桥梁位移重构
分别用基于频域带通滤波、基于EMD 自适应滤波、基于FFT+EMD 滤波和基于EEMD 自适应滤波处理4 种方法实现桥梁动态位移重构。位移重构结果如图21 所示。
图21 中桥梁动态位移有2 个峰值,结合摄像头所拍摄的录像,第1 个峰值是由一辆小轿车引起的动态振动位移,峰值比较小,并且很快衰减到零;第2 个峰值则是一辆大型满载卡车引起的,峰值较大,最高达到1.4 mm,并且自由衰减时间较长,衰减时间大概持续了35 s。利用这些数据可以做出桥梁预警并求出桥梁的部分结构特征,比如桥梁的固有频率和阻尼比等。从图21(b)可以看出,由于模态混叠现象和端点效应,基于EMD 自适应滤波方法重构的动态位移信号已经完全失真。
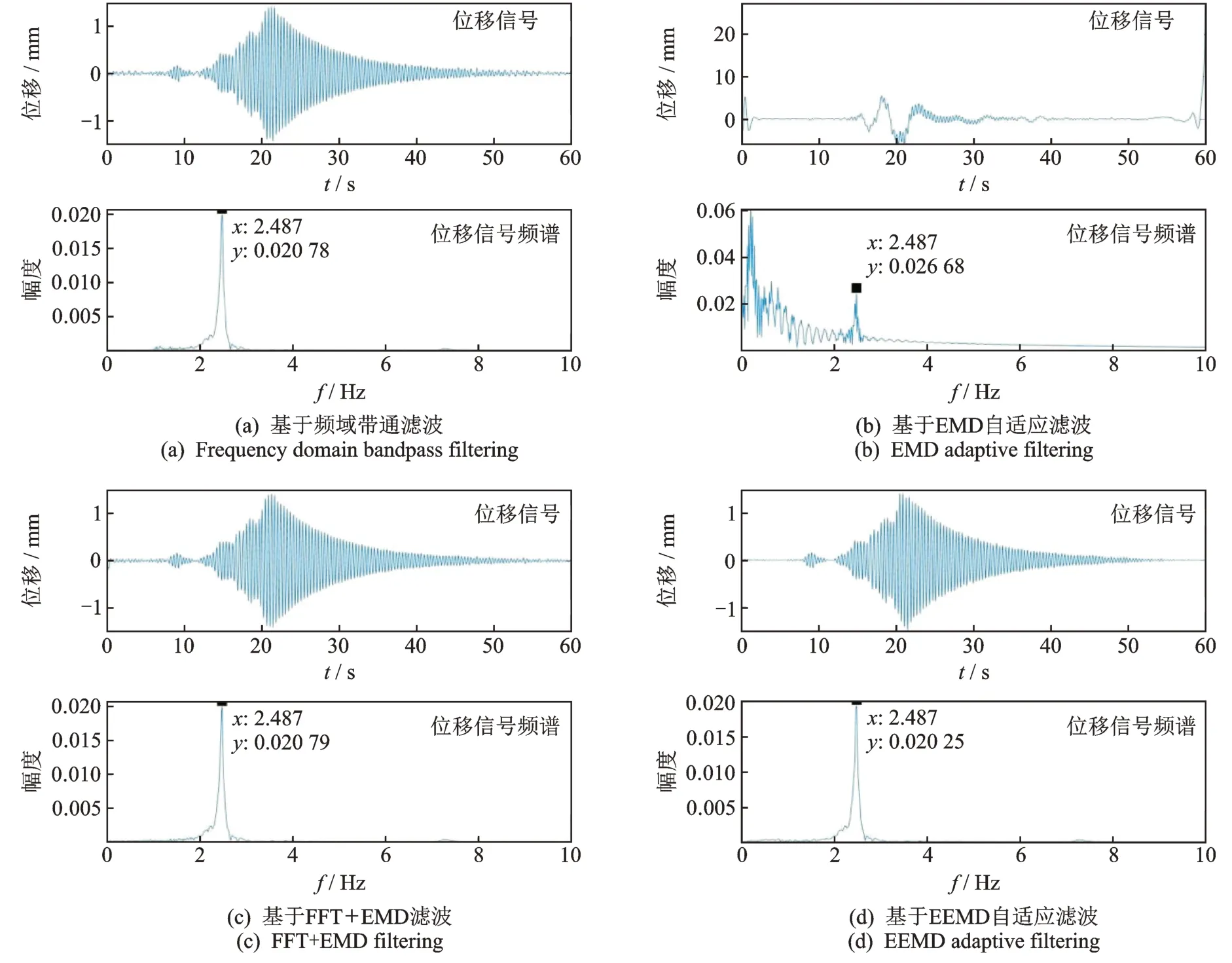
图21 桥梁动态位移重构的结果Fig.21 Results of reconstruction of bridge dynamic displacement
图22 为基于FFT+EMD 滤波处理后的位移信号和基于频域滤波处理后的位移信号的对比图。红色信号线和蓝色信号线分别表示基于频域带通滤波处理和基于FFT+EMD 滤波处理得到的位移信号,整体上两者几乎重合。但在0~0.5 s 内,由于EMD 分解产生的端点效应,基于FFT+EMD 滤波处理后的位移信号出现了小幅度的信号失真。上述仿真结果表明,在对这段信号处理的过程中,EMD分解起到的优化效果有限,反而由于EMD 分解过程中端点效应,加大了位移结果的误差。

图22 图21(a)和图21(c)位移信号对比图Fig.22 Figure 21 (a) and figure 21 (c) displacement signal comparison chart
图23 为基于频域滤波处理和基于EEMD 自适应滤波处理得到的位移信号对比图。红色信号线和蓝色信号线分别表示基于频域带通滤波处理和基于EEMD 滤波处理得到的位移信号。虽然从整体上来看两者位移信号几乎重合,但是在前8 s 没有车辆经过,理论上位移信号应该为零的区间段内,基于EEMD 自适应滤波处理得到的位移信号滤波效果最好。

图23 图21(a)和图21 (d)位移信号对比图Fig.23 Figure 21 (a) and figure 21 (d) displacement signal comparison chart
5 结束语
本研究利用EEMD 算法从振动加速度信号到位移信号逐次分解重构,依次对振动加速度信号、速度信号以及位移信号进行修正,最终重构出满足计算精度的位移信号。通过软件仿真、振动测试台验证和现场试验,与基于频域滤波处理方法、基于EMD 自适应滤波处理方法、基于FFT+EMD 滤波处理方法进行比较,验证了基于EEMD 自适应滤波算法重构桥梁动态位移的有效性。
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19 13:26:22
摄影世界(2022年1期)2022-01-21 10:50:14
知识经济·中国直销(2018年12期)2018-12-29 12:22:14
雷达学报(2018年3期)2018-07-18 02:41:34
商周刊(2017年6期)2017-08-22 03:42:36
山东大学法律评论(2016年0期)2016-08-16 03:24:12
火控雷达技术(2016年1期)2016-02-06 02:17:55
无线电通信技术(2015年3期)2015-12-23 11:37:02
电测与仪表(2015年3期)2015-04-09 11:37:24
振动工程学报(2015年1期)2015-03-01 01:15:44