
无人驾驶洗扫车智能控制系统研究
2021-06-26 07:23:00付伟龙王学友朱阳蒋瑞锋王富强赵增耀
汽车实用技术 2021年11期
付伟龙,王学友,朱阳,蒋瑞锋,王富强,赵增耀
(陕西汽车控股集团有限公司,陕西 西安 710200)
1 前言
伴随底盘自动驾驶的日臻成熟以及场景式无人作业的逐步推广,洗扫车的无人驾驶化已逐渐成为市场趋势。传统的洗扫车驾驶员操作既要保证车辆行驶安全,还要选择适当的洗扫模式保证路面清洁效果。驾驶员操作强度大,实际工作当中驾驶员通常在作业出发前选好作业模式,工作过程一般很少进行模式改变,造成要么油耗浪费,要么扫路效果不满足要求的现状。
2 背景及意义
目前市面上的智能驾驶洗扫车能够实现自动驾驶、自动掉头、自动过红绿灯、自动停车等[1]。但是,上装的作业模式固定,不能根据作业道路的状况、作业环境的变化以及车辆行驶状态而自动调整。洗扫车智能控制系统主要研究以下四方面技术。a.通过对车辆行驶状态的分析判断,在洗扫车临时停车等待(等红绿灯、避让行人)自动调整扫盘状态、水路系统等,达到节油、节水、节料的效果;b.通过对环境温度的采集分析,自动调节各水路系统,从而解决低温环境下由于洗扫车作业造成的路面结冰现象;c.通过对雨量的采集分析,自动判断是否适合作业或返航;d.通过对路面洁净度的采集分析,自动调节车速、风机转速、扫盘速度等,实现高效节能的清扫效果。
3 系统组成及原理
该控制系统主要由上装控制单元、行驶状态采集单元、环境温度采集单元、雨量采集单元、路面洁净度采集单元五部分组成,其中上装控制单元,主要负责上装信号的采集、控制及与底盘的通信;行驶状态采集单元主要对车辆行驶状态的信息采集、分析及判断;环境温度采集单元实现对车辆运行环境的实时采集、监控,并进行工作安全性判断;雨量采集单元主要对雨天作业时的雨量大小进行直接/间接采集及判断,分析是否适合继续作业,并选择合适的作业模式;路面洁净度采集单元主要对路面的洁净度进行采集、分析,实现分级控制。最终实现上装水路系统、气路系统、液压执行系统、报警及语音播报系统的实时精准控制。系统组成如图1 所示。
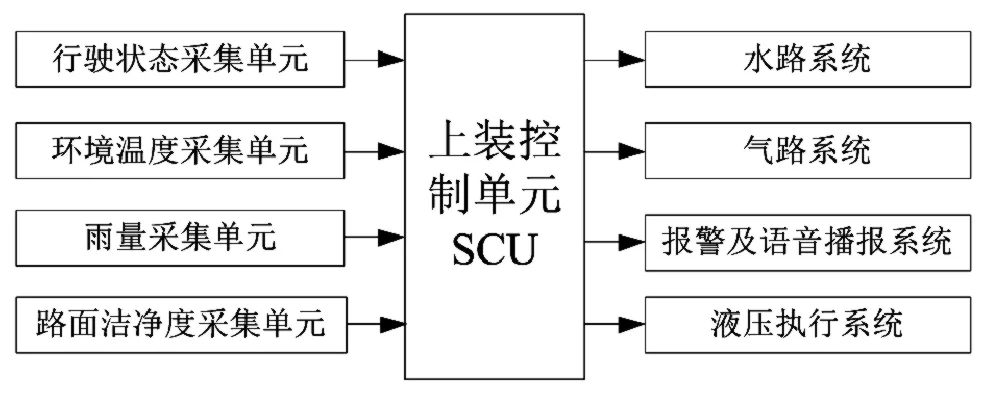
图1 系统组成图
3.1 行驶状态采集控制单元
通过车速行驶速度、驻车制动信号、行车制动信号等车辆行驶状态的采集、分析及判断,实现在洗扫车临时停车等待(等红绿灯、避让行人)时,a.自动关闭洗扫车的高压水路喷水/湿扫扫刷喷雾;b.停止扫盘马达旋转,关闭水路,降低功耗;c.停止扫盘旋转,减少扫刷磨损。并在车辆起步后自动启动相应水路及扫盘马达,实现了节油、节水、节料的目的。具体如图2 所示。
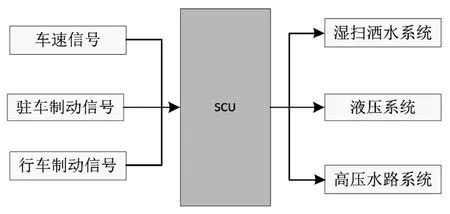
图2 行驶状态采集控制单元组成图
有效解决了临时停车等待时a.吸嘴是不足以把喷出的水吸回,而造成的污水横流,影响市容市貌,易引发交通事故现象;b.扫盘一直旋转,产生不必要的磨损损耗,导致扫刷更换周期缩短,整车使用成本增加;c.整个上装都在工作,此时油耗是不必要的,同时造成不必要的尾气排放。
3.2 环境温度采集控制单元
通过对实时气温、路面温度及电磁阀状态的采集、分析,实现对水路系统的自洁系统、喷水系统、喷雾系统的自动关闭及开启,有效解决及避免了气温较低的情况下,洗扫车作业时的喷水喷雾造成的路面湿滑结冰问题。
具体为当当天气温TY<0℃时,洗扫车自洁系统、喷水系统、喷雾系统全部关闭;当当天气温TY≥0℃,且实时气温TH<标定值T1 时,若路面温度TL≥标定值T2 时,洗扫车喷水系统关闭,若路面温度TL<标定值T2 时,喷水系统和喷雾系统同时关闭。详细控制逻辑如图3 所示。

图3 环境温度采集控制逻辑图
3.3 雨量采集控制单元
通过对洗扫车雨天作业过程中的实时雨量采集、分析及判断,实现对雨量进行小雨、中雨、大雨、暴雨四个分级,并针对不同的雨量大小进行标准作业、干扫作业、停止作业返航三种状态的控制及信息发送。
雨量的采集采用雨量传感器、路面图形识别、污水箱水位变化率三项技术融合,从而根据雨量分级确定确定洗扫车最佳工作模式。系统组成如图4 所示。

图4 雨量采集控制单元组成
通过雨量和洗扫车污水箱水位变化率的分析判断,确定当前雨量是否适合需要继续作业或作业模式调整。否则就会出现大量抽吸雨水、造成污水箱快速被雨水占满,达不到清扫道路的目的。
具体为当实时雨量Ri<雨量阈值R1 (mm/h)时,系统定义为毛毛雨/小雨,此时洗扫车保持标准作业模式;当雨量阈值R1<实时雨量Ri<雨量阈值R2 时,系统定义为中雨,此时洗扫车结合路面图像识别系统的采集及分析,若图像识别路面为潮湿状态时,车辆开启干扫作业模式,否则保持标准作业模式;当雨量阈值R2<实时雨量Ri<雨量阈值R3 时,系统定义为大雨模式,此时再结合洗扫车污水箱水位变化率Kw,若污水箱水位变化率Kw<污水箱水位变化率阀值KwB时,车辆开启干扫作业模式,否则直接返航并发送相关返航信息;当时雨量Ri>雨量阈值R3 时,洗扫车停止上装作业并进入返航模式。
3.4 路面洁净度采集控制单元
通过图像采集摄像头对路面洁净度进行实时采集[2]、分析及洁净度分析,将路面分为轻度垃圾路面、中度垃圾路面、重度垃圾路面。并根据三种路面状态智能调节洗扫车作业车速及工作模式,对车速、风机转速、扫盘速度进行精准控制[3],实现高效节能的清扫效果。具体为根据路面洁净度分析得出优选的作业车速和工作模式,若当前车速高于目标车速,则工作模式立即置成强扫,待实际车速降到目标车速后,工作模式置成目标模式。若当前车速低于目标车速连续5 分钟(可设置),则直接提速,工作模式立即置成强扫,待实际车速升到目标车速后,工作模式置成目标模式。详细如图5 所示。
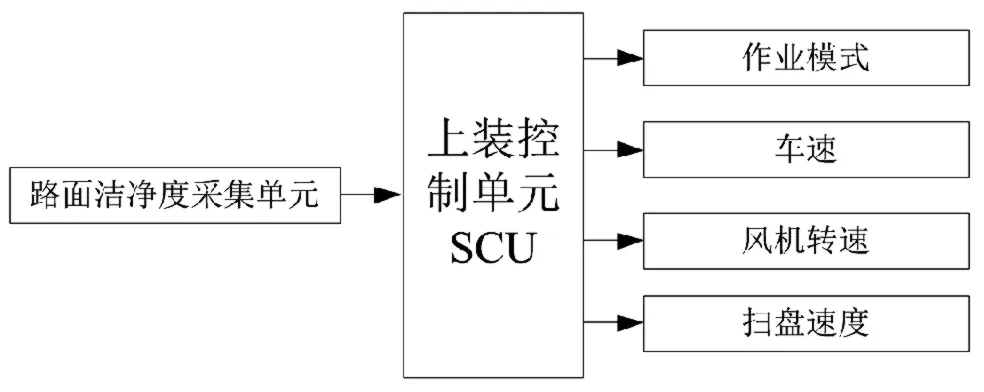
图5 路面洁净度采集控制单元组成图
4 结语
无人驾驶洗扫车智能控制系统从高效、智能、环保、节能四个维度开展了基于路面洁净度、环境温度、雨量及车辆行驶状态的洗扫车智能控制系统研究,有效解决了传统洗扫车作业效率低、驾驶员劳动强度大以及自动驾驶洗扫车作业模式固定的行业难题,从而实现洗扫车的无人作业。
猜你喜欢
航天标准化(2023年3期)2024-01-21 03:47:40
农业科学研究(2022年2期)2022-08-01 05:25:30
成都信息工程大学学报(2019年1期)2019-05-20 09:14:26
中国煤炭地质(2019年1期)2019-02-15 06:11:54
汽车维护与修理(2018年1期)2018-04-04 01:13:22
现代商贸工业(2016年11期)2016-12-26 10:00:28
西藏科技(2016年5期)2016-09-26 12:16:40
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33
家畜生态学报(2014年12期)2014-02-27 15:40:09
