
基于改进滑模观测器的双定子电动机控制系统研究
2021-06-24 01:24许珈宁王雯靓李志国
东北电力技术 2021年5期
许珈宁,王雯靓,李志国,李 岩
(国网阜新供电公司,辽宁 阜新 123000)
1 双定子永磁无刷电动机概述
双定子永磁无刷(DS-PMBL)电动机是永磁无刷电动机的一种,它继承了其所固有的高效率、高功率密度以及过载能力强等优点,同时,由于克服了永磁电动机弱磁调速困难,并提升了电动机的内部空间的利用率,因此可以产生更大的转矩,电动机的转矩密度得到进一步增强[1-3]。文献[4-5]推导了DS-PMBL电动机的数学模型,为今后深入研究该种电动机奠定了理论基础。
在DS-PMBL电动机控制系统中,为了获得电动机转速及转子位置信息,需要安装位置传感器,并且对其精度和分辨率都有较高要求,位置传感器不仅价格昂贵,而且在恶劣环境下,其可靠性及耐用性也会降低,并且安装工艺也较为复杂。目前,通过无位置传感器技术来替代这些传感器,以提高控制系统的稳定性和鲁棒性。无传感器技术是指分析电动机的数学模型,不断修正估计电流与实际电流之间的误差,以此来估测电动机的转速及角度信息[6-7]。
文献[8-10]设计了滑模观测器(SMO)来测算电动机参数,该方法具有较强的稳定性,但是滑模变结构有一定的抖振和低速下的启动困难等问题。本文采用饱和函数对传统SMO进行改进,并增加了截止频率随转速变化的变截止频率低通滤波器(LPF)、引入卡尔曼滤波器对反电势再次进行滤波,并使用锁相环计算出转子位置和转速信息,经过改进的滑模观测器能够显著地抑制扰动,并且估测信息精度得到明显提升,提高了系统的稳定性。
2 DS-PMBL电动机的数学模型
DS-PMBL电动机的结构如图1所示,本质上是一种永磁无刷电动机,建立DS-PMBL电动机在αβ坐标系下的电流方程与反电势方程。
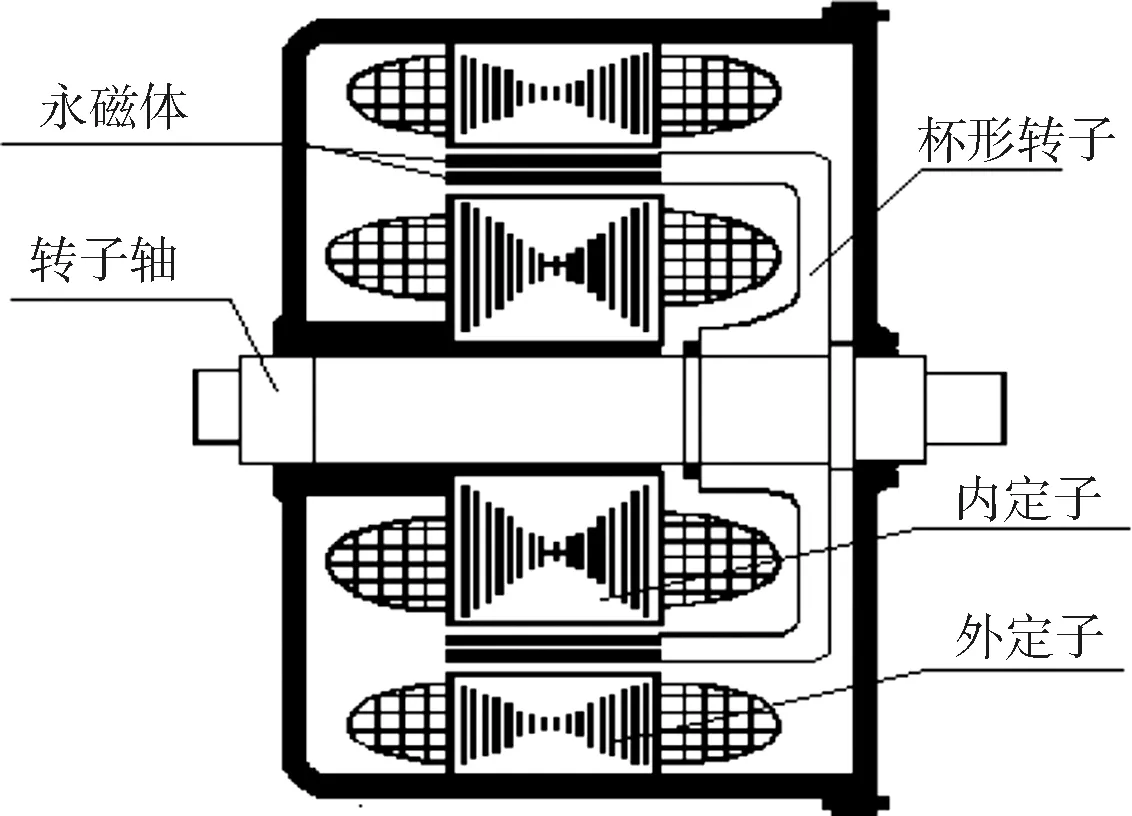
图1 DS-PMBL电动机结构
电流方程为
(1)
反电势方程为
(2)
式中:iα、iβ为定子电流在α、β轴的分量;uα、uβ为定子电压在α、β轴的分量;eα、eβ为反电动势在α、β轴的分量;θe为转子角度;ωe为转子角速度;L为定子相电感;Rs为定子相电阻;ke为反电动势系数。
3 滑模观测器设计
3.1 传统的滑模观测器
3.1.1 传统滑模观测器的设计
由式(1)、式(2)构造SMO为
(3)
构建滑模面为
(4)

将式(2)再次代入式(3)来提高估算精度,得:
(5)

由式(3)、式(5)可得电流观测值的动态误差为
(6)

(7)
由式(7)可以看出,反电动势与符号函数有关,对信号进行滤波后,可得到较为平滑的信息,从而对转速与角度进行估测。
3.1.2 传统滑模观测器的稳定性分析
由滑模变结构理论可得SMO的稳定条件为
(8)
即满足:
(9)
可得满足SMO的稳定条件为
3.1.3 转子位置的估算
式(7)的反电动势存在高频信号,需通过低通滤波器(LPF)对其滤波。
由式(7)可得反电动势的初始估值为
(10)
因此可得平滑的反电动势估值为
(11)
由式(2)、式(10)能够得到转子的速度与位置:
(12)

传统SMO的结构如图2所示。

图2 传统滑模观测器的结构
3.2 改进的滑模观测器
3.2.1 基于饱和函数的滑模观测器
传统SMO的反电动势是由符号函数sign(x)来观测的,如图3(a)所示,由于该符号函数的不连续性,会影响其在滑模面附近做穿梭运动,这就会使系统的损耗增多,降低稳定性。
为了减少系统抖振,本文采用具有连续性的饱和函数,如图3(b)所示。
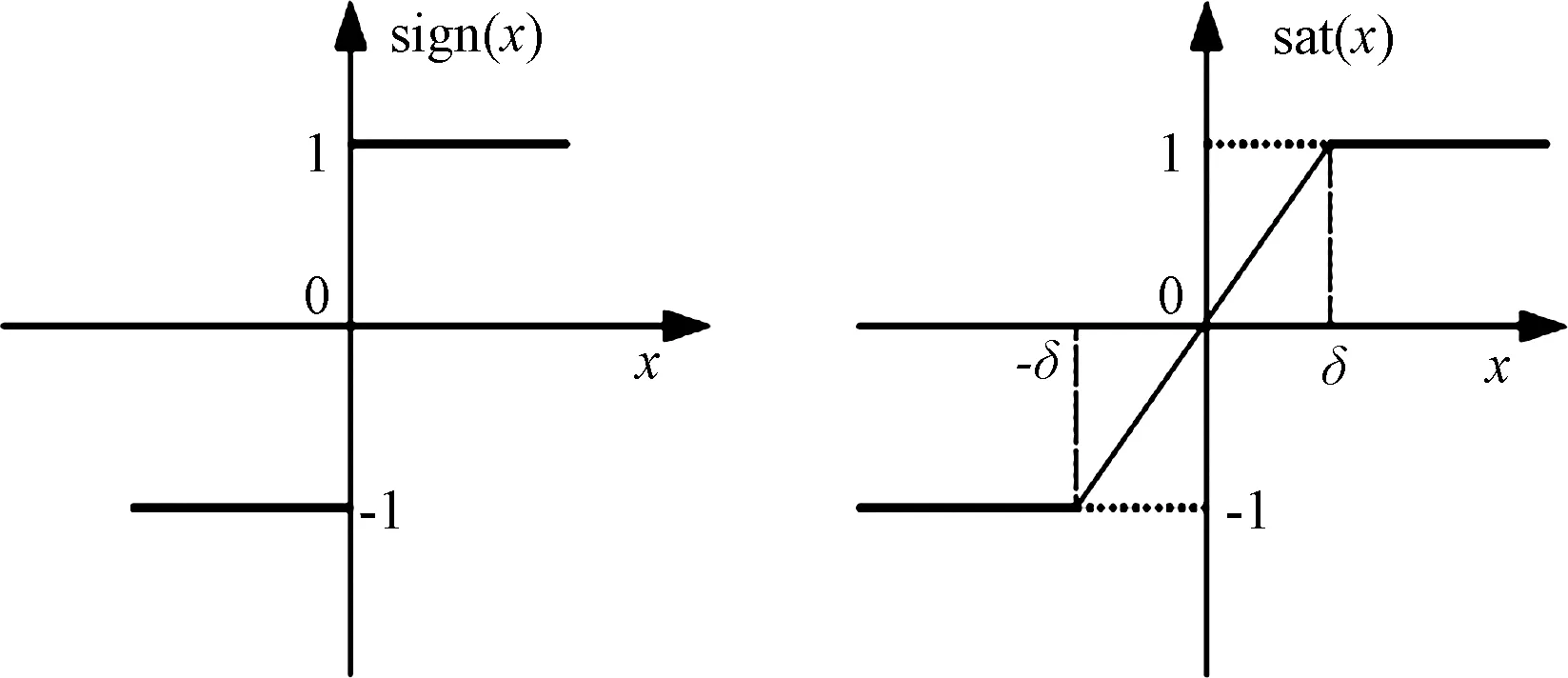
(a)符号函数 (b)饱和函数图3 符号函数和饱和函数
饱和函数为
(13)
采用饱和函数的 SMO 为
(14)
式中:Ks为改进SMO的滑模增益;η为电流误差的设定值。
改进SMO的稳定条件为
(15)
即满足:
(16)
可得满足改进SMO的稳定条件为
3.2.2 变截止频率低通滤波器
传统的滤波器截止频率为固定值,当电动机转速变化时观测值也会改变,降低转子位置的估算精度。对本文采用变截止频率的LPF来提高估计精度。
LPF的数学模型:
(17)
将式(17)转换为传递函数形式:
(18)
LPF的截止频率与转子转速关系为
(19)
式中:kf为正数;ke为较小的正数,确保在低转速下的工作。
由上述分析,变截止频率LPF为
(20)

3.2.3 卡尔曼滤波器的设计
经上述 LPF 得到的反电动势仍含有测量噪声,卡尔曼滤波器能够滤除反电动势的纹波分量,而且对由于电动机参数误差造成的估算误差具有较好的消除作用,本文采用LPF与卡尔曼滤波器的2级滤波来得到更为平滑的观测值。
卡尔曼滤波器的状态方程为
(21)
3.2.4 锁相环转速提取
传统得到位置信息的方法是反正切运算,但会产生一定噪声。本文采用锁相环( PLL)技术能够进一步提高估算效果。基于PLL的估算如图4所示。

图4 基于锁相环的估算流程
为了得到理想的频率特性,Kp、Kl为
(22)
改进的SMO 结构如图 5所示。
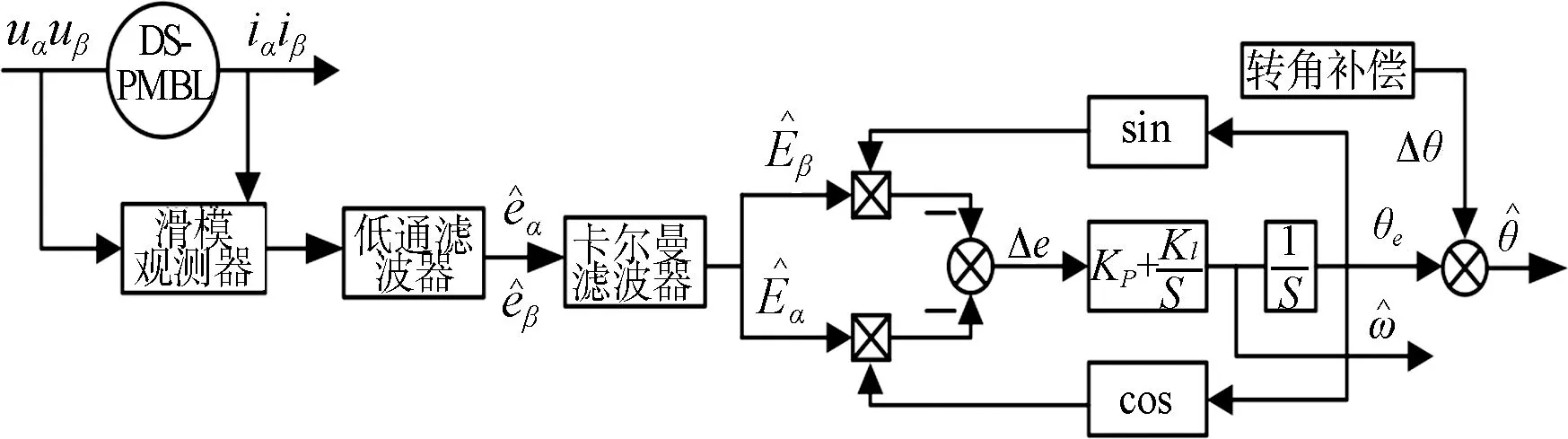
图5 改进的滑模观测器结构
4 系统仿真研究
图6为使用改进SMO的DS-PMBL电动机控制图。
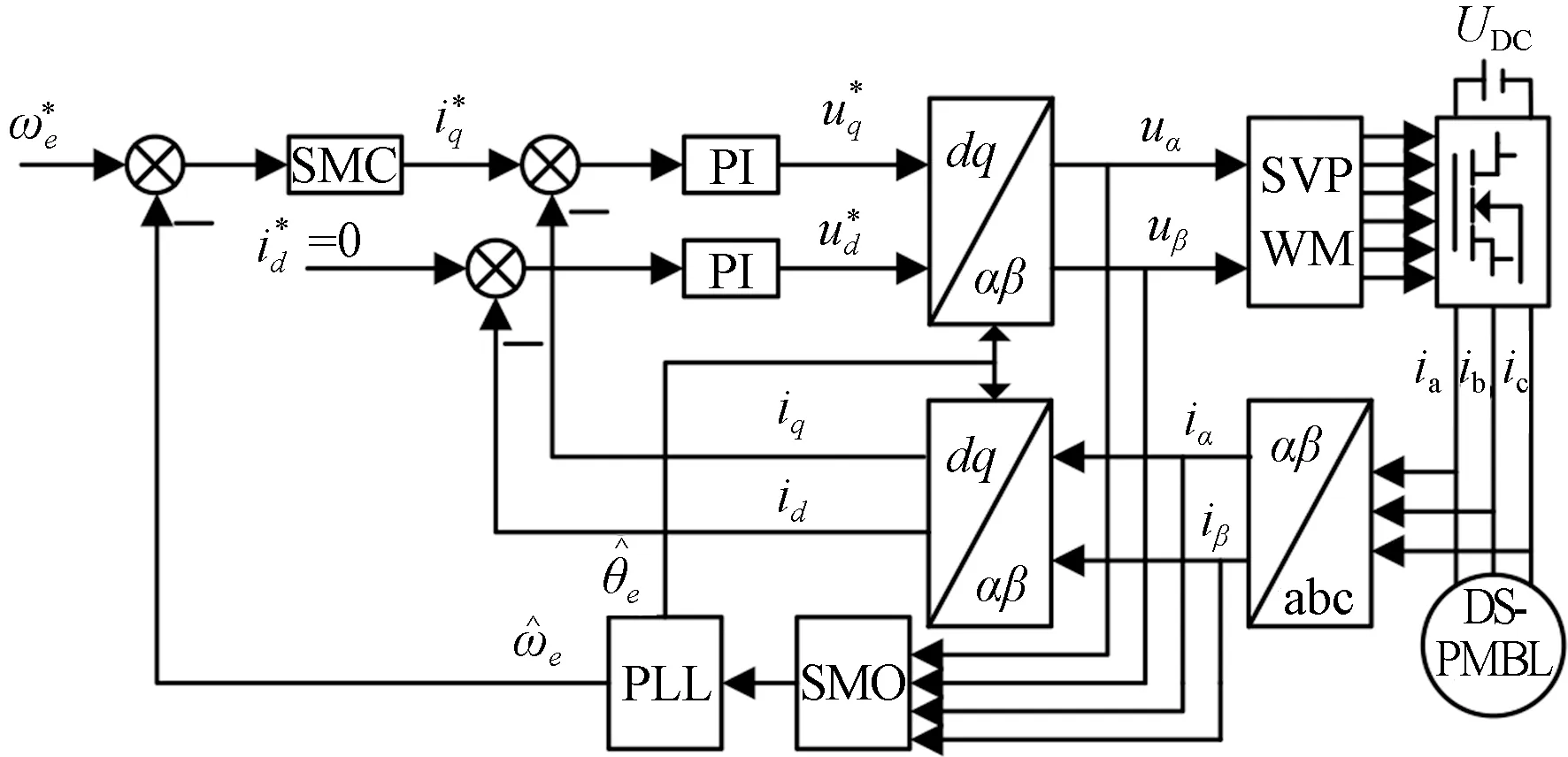
图6 基于改进SMO的DS-PMBL电动机控制流程
设DS-PMBL电动机的负载为2 N·m启动,转速为1000 r/min;0.05 s时,将负载增加为5 N·m;0.1 s时,将转速升至1500 r/min,仿真结果如图7所示。

图7 电流波形
图7为负载与转速突增时电动机的电流波形,由图7可得电流的谐波与噪声小。图8为通过观测到的反电动势,由图8可得改进SMO得到的反电动的平滑性好,可以通过其得到转速与位置信息。
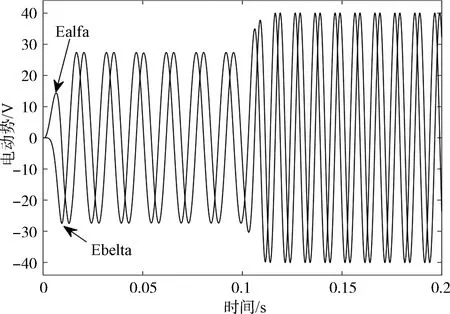
图8 反电动势波形
图9是估计转速和实际转速波形,图10是二者的误差。由图9、图10可知,由于电动机启动时的反电动势较小,因此转速的误差较大,但估计转速可以快速跟踪实际转速,当转速稳定时的误差约等于零。当转速突增时估计速度误差波动范围很小,证明系统具有较强的稳定性和抗干扰能力。

图9 估计转速与实际转速波形
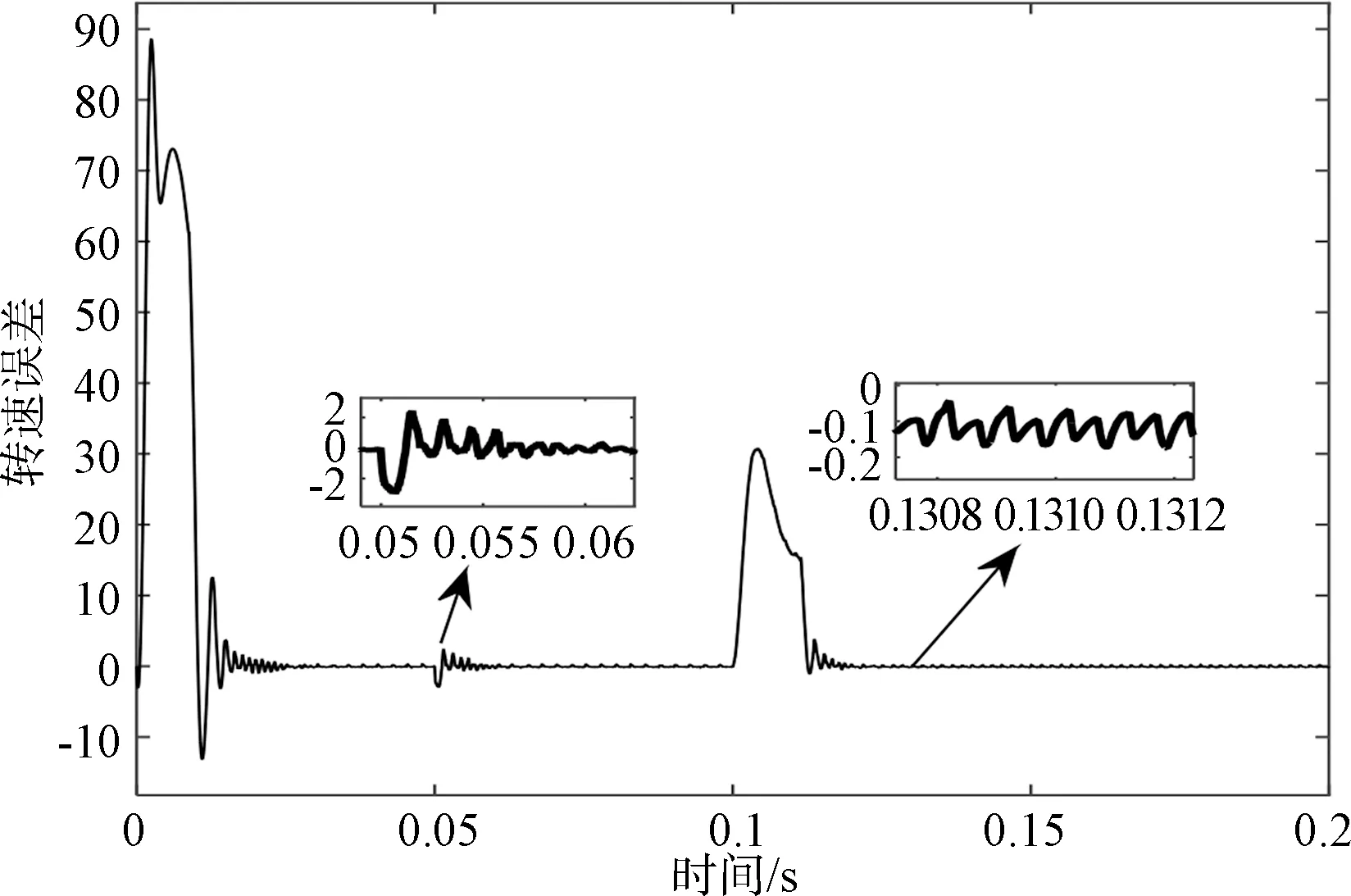
图10 转速误差曲线
图11是转子估计位置和实际位置波形,图12是二者的误差。由图11、图12可知,估计位置能很好地跟踪实际位置,几乎没有误差,满足控制需要。
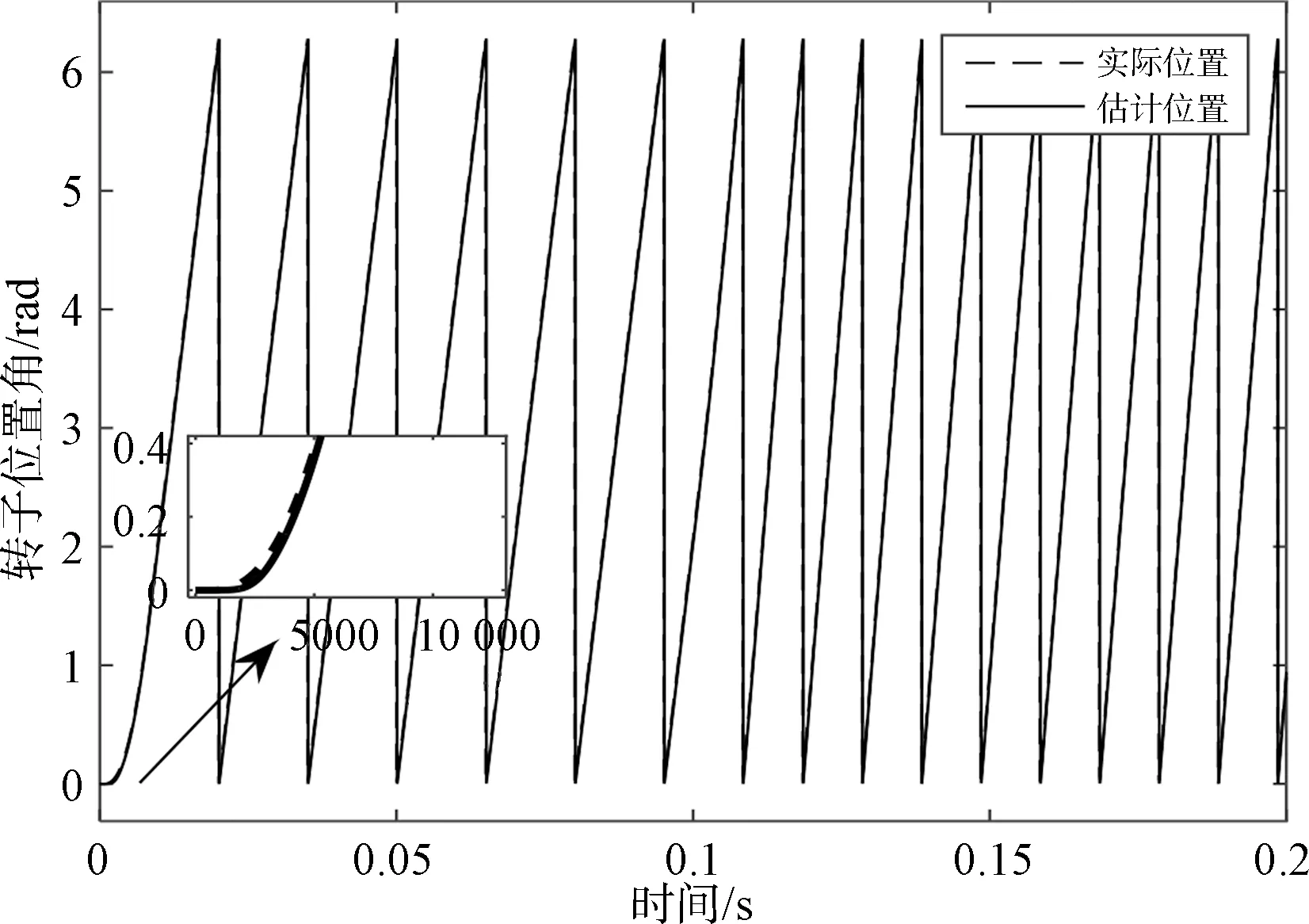
图11 转子位置跟踪波形
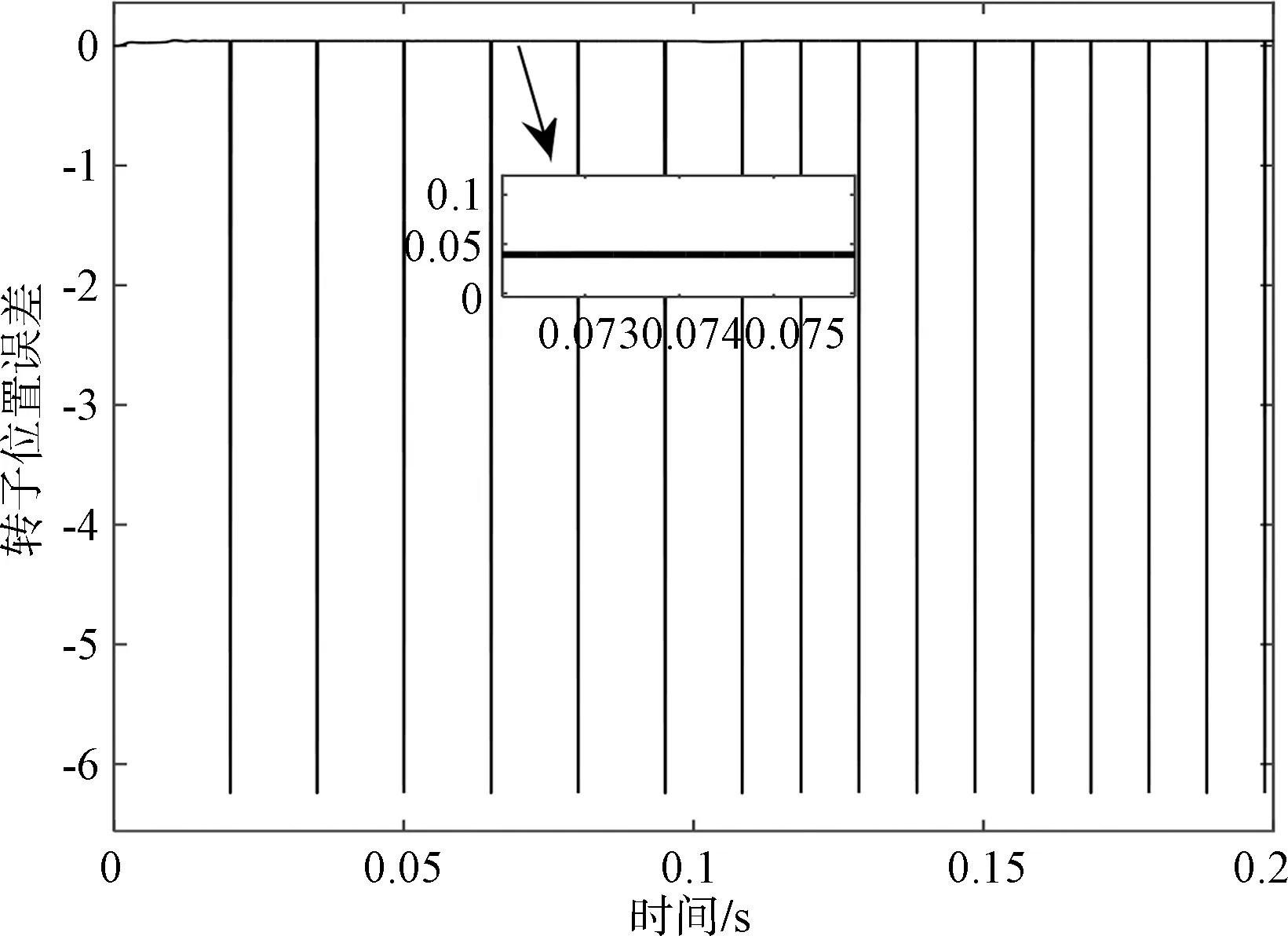
图12 转子位置误差曲线
5 结束语
为了使DS-PMBL电动机的调速系统得到改善,在SMO控制系统的基础上提出了一种改进的SMO控制系统,该方法采用了饱和函数,并增加了变截止频率LPF与卡尔曼滤波器,最后通过锁相环得到转子位置和转速信息。仿真结果表明,改进的SMO控制估算精度高,在负载与转速变化时抗干扰能力强,系统的稳定性好,具有一定应用前景。
猜你喜欢
微电机(2022年8期)2022-10-12
无损检测(2022年6期)2022-07-05
微特电机(2021年11期)2021-11-16
防爆电机(2020年4期)2020-12-14
郑州大学学报(工学版)(2020年2期)2020-06-16
重庆理工大学学报(自然科学)(2019年6期)2019-07-16
汽车电器(2019年2期)2019-03-22
浙江大学学报(工学版)(2016年4期)2016-12-22
铁道科学与工程学报(2015年5期)2015-12-24
电测与仪表(2015年19期)2015-04-09
