
基于二阶聚类的空域飞行冲突危险性分级评估
2021-06-24 06:24谢道仪
科技和产业 2021年6期
霍 达,丛 玮,谢道仪
(中国民用航空局 空中交通管理局,北京 100710)
近年来,如何推动民航高质量发展是民航业共同面临的迫切要求和艰巨任务。安全作为民航高质量发展的重要前提,是四强空管的核心要素之一,依然是当下空管能力建设的重要组成部分。目前,中国空管运行中虽有管制自动化系统提供的冲突告警功能,但仅限于在实时运行阶段,无法对典型冲突场景提供事后分析支持。随着航空器飞行性能的不断提升,通信、导航、监视设备性能的持续发展,以及空域结构的改变以及航班量的增长带来的运行环境变更,当初制定的冲突评估指标已经难以适应当下的安全管理工作,将不利于在保证安全阈值的情况下提升运行效率,更会对空中交通的安全性带来影响。故而,亟须重新审视冲突分析指标,结合当下的运行特征进行指标的完善工作,使之可以适应当下的冲突分析。根据ICAO《附件19 安全管理》提出的安全管理体系框架的要求,各民航当局应建立安全绩效监测与衡量体系,以评估其辖区内航空安全情况[1]。空中交通冲突包括危险接近和低于最小间隔的事件,按照事件严重程度,被列为事故征候和严重事故征候[2]。中国及欧美各国均已建立详细的量化体系,用以评估空中交通冲突的严重等级,然而目前的评价方法对各项危险性影响因素指标采取简单的相加,不仅忽略了各项因素对于冲突危险性贡献的差异,而且未将各项因素间的相互影响纳入考量范畴,进而对于冲突危险性的分级定性仍缺乏科学的标准[3]。
在空中交通安全管理指标体系的构建以及评价方面,王昌顺立足于民航系统的角度采用谱分析法定量描述了民航行业的安全管理目标与对策[4]。徐佳璐结合中国实际情况提出构建空管安全管理体系的5个重要方面,并运用层次分析确定权重,分析安全管理重点[5]。贾贵娟针对空管风险因素进行了收集与分析总结,运用风险管理、安全行为学等构建空管安全风险评估指标体系,并使用神经网络、灰色系统等方法进行综合评价[6]。本文在吸收上述研究成果的基础上,针对官方的飞行冲突评价体系进行研究与改进,旨在更加全面地评估飞行冲突的危险性。此外,由于在航空器发生冲突时便产生了极强的关联性,其中一架航空器飞行诸元的变化会对两架航空器之间的飞行安全产生连携效应[7],故而当航空器航行诸元数据分布在不同的区间范围内时,描述航行诸元的指标将对飞行冲突的危险性产生不同的影响。然而,当前指标体系中尚未关注不同指标之间重要程度的动态性差异对于冲突危险性的影响。因此,引入信息熵来对指标体系中各指标赋权,刻画各类事件中冲突航空器不同的飞行诸元分布对于冲突危险性的动态影响。在空域运行特征的描述与区分上也已经有了较多的研究,丛玮利用主成分分析法实现了对同类指标表达内涵的精炼,并针对时间序列的高维属性,构建了基于DTW的k-medoids聚类算法,识别了15个扇区样本在各个具体交通行为下多样化的分布模式[8]。董斌等使用FCM算法对密度类、动态类、冲突类3类指标进行聚类分析划分空域运行态势等级[9]。虽然这些聚类方法对于相同层级的指标聚类具有较好的效果,但是在进行扇区飞行冲突危险性评估时,不仅需要关注各个影响因素的贡献程度以及相互影响,还需要提供一个冲突危险性值,作为最终的危险性判定。故而引入了二阶聚类,将飞行冲突危险性的影响因素与最终危险性值划分至不同层级进行聚类分析[10]。
综上,目前针对扇区飞行冲突危险性的分级评估的相关研究成果还较少。基于这一现状,本文关注提升空管运行安全的决策支持能力建设,进一步完善对于飞行冲突属性的描绘,研究飞行冲突实时指数计算模型,根据运行事件特征,建立飞行冲突分级评估模型和方法,为空中交通安全管理部门开展飞行冲突评估及调查工作提供支持。
1 空域飞行冲突危险性评估
1.1 空域飞行冲突危险性评估指标体系
1.1.1 飞行冲突探测
现行的冲突危险性评估体系中仅将小于规定间隔的航班运行状态纳入冲突危险性的计算当中,然而,由于飞行冲突的发生过程是一个航行诸元急剧变化的动态过程,往往当航空器发生小于规定间隔后已经处于冲突解脱的尾声,此时航空器对开始远离后冲突便失去了进一步恶化的可能性。因此,针对飞行冲突的危险性评估不应局限于规定的最小间隔标准,为了更加全面地描述空域飞行冲突的演化流程,本体系拟将冲突危险性探测的时空区间做适当的拓展,增加关注小于最小间隔前后的冲突探测阶段航空器对的飞行冲突危险性。即当航空器对的垂直间隔突破2倍Vsm且水平间隔突破对头穿越间隔(进近30 km,区调50 km)时纳入冲突探测的范围,当冲突探测范围内的航空器存在垂直或水平方向上的接近时,则将该航空器对判定为存在潜在冲突的航空器对并进行飞行冲突危险性计算。
1.1.2 空域飞行冲突危险性特征指标
为了确保冲突危险性评估在当前空域环境、技术条件下的适用性与可操作性,以及分析所需数据的可获取性。本指标体系在表1中所罗列的基础指标在结合一线员工工作经验的基础上,从各国以及地区的航空安全管理部门用以评估空中交通冲突严重等级的指标体系中进行筛选。筛选范围涵盖了中国(中国民用航空局,CAAC)、欧盟(欧洲航空安全局,EASA)、美国(联邦航空局,FAA)和澳大利亚(澳大利亚交通安全局,ATSB)等关于飞行冲突危险性评估的相关法规和文献。指标体系共涵盖飞行间隔、运动趋势两个类别共计5个指标,旨在从空域中航班的相对位置以及飞行态势出发,评估该空域的飞行冲突危险性。

表1 飞行冲突危险性评估指标
1)航空器间隔。航空器间隔即发生冲突的航空器对之间的物理距离,该类别指标用以体现冲突航空器空间上的相对位置,包含了垂直间隔与水平间隔用以区分航空器高度与航向改变上存在的差异,以及不同方向间隔大小所带来不同的危险性影响。航空器间隔是否突破最小间隔阈值是目前局方评价航空器是否发生飞行冲突的判断依据,因此航空器冲突危险性评分将首先满足间隔被突破的条件。

(1)
垂直间隔基于二次雷达航空器应答机S模式显示高度进行计算,Vsm即为在相应高度层飞行时,航空器间的最小垂直间隔,航空器在8 400 m(含)以下的高度层飞行时Vsm为300 m,12 500 m(不含)以上时为600 m。

(2)
水平间隔即通过二次雷达获取冲突航班的经纬度数据进行计算,式(2)中Hs代表冲突航空器对之间的水平间隔,m,相应的Hsm即为最小水平间隔,m。在雷达管制下,航空器位于6 000 m含以下的高度层飞行时Hsm为6 km,6 000 m以上为10 km。
2)接近速度。
航空器接近速度即航空器对之间实时间隔的变化速率用以体现冲突的恶化或缓解情况,其中包含了垂直接近率VS与水平接近率CR体现冲突可能存在进一步恶化情况的紧迫程度。表2中罗列了不同阈值下的垂直接近率以及水平接近率的评分Dvs和Dcr。

表2 冲突航空器对接近速度
3)航迹夹角。航迹夹角即航空器对之间水平方向上的相对运动趋势,用以区分汇聚(对头、交叉)、平行、分散等航空器对之间不同的相对运动状态所带来的危险性的差异。航迹夹角结合航空器的间隔与接近速度这3个指标类别完成了对于航空器相对运动的矢量描述,将更加立体地刻画冲突航空器对的运动轨迹以表征冲突的紧迫程度差异。式(3)表征了航空器航迹汇聚时的带来的危险性,但当航空器相遇过后航迹开始分散时,航迹夹角将不再产生危险性即Da=0,其中T表示航空器对的航迹夹角。

(3)
考虑到两架航空器在雷达管制下使用侧向偏置在航路航线上运行时,航空器水平方向上的接近速度被削弱,对于航迹夹角的得分需要进行一定的修正。修正系数offset=1-G/Hsm,其中G为航空器偏置运行时实际的偏置距离。
1.2 空域飞行冲突危险性评估方法
1.2.1 空域飞行冲突危险性指标统计
基于冲突危险性评估指标体系展开对于航空器冲突危险性的评估,将作为航空器对危险性的概括与参照。为了区分不同飞行冲突事件指标重要程度的差异,针对不同的冲突航班对均进行指标的信息熵计算并赋予不同的权值。熵权法是一种基于熵理论的客观赋权代表,该算法主要基于系统中各个元素所包含的信息熵获得权重值。通常来说,某个元素的信息熵越小,其离散性越大,所包含的信息数量越多,在评估过程中的影响力也越大,其权值相应也越大。熵权法是依据指标自身所包含的信息熵来确定其权值大小,因此能够有效地减少评价中主观因素带来的影响和误差[11]。
通过熵权法计算得到各航空器对冲突危险性指标信息熵权值k后,将权值与各指标相乘并累加,作为该航空器对的飞行冲突危险性。而某个空域单元的空域飞行冲突危险性,如式(4)所示即为扇区内所有被冲突探测的n对航空器所产生的冲突危险性之和。值得注意的是,本体系不再将累加得到的数值作为表征空域飞行冲突危险性的唯一判据,而是在结合所有冲突指标的基础上,将其作为类别变量辅助判断危险性等级,从而最大程度的保留冲突数据所包含的信息。

(4)
1.2.2 空域飞行冲突危险性分级
有效的冲突危险性聚类分级不仅需要考虑整体的冲突危险性,还需要将具体的飞行冲突影响因素纳入考量,从而避免采取累加计算的飞行冲突危险性无法精确刻画的众多影响因素之间的相互连携以及组织形式。因此,将1.1.2中介绍的飞行冲突危险性指标作为连续变量,并且将各指标计算得到的冲突危险性作为类别变量,通过二阶聚类法解决两类聚类变量的问题。二阶聚类,其优势至少表现在以下几个方面:可同时基于类别变量和连续变量进行聚类;可自动确定最终的分类个数;可处理大型数据集。二阶聚类需要以下两个步骤来完成:
1)建立聚类特征树(CF),将所有变量的信息使用树根发起第一个叶节点进行存储安置,随后基于对数似然模型距离测量规则等计算节点内部的相似程度,在相似度较差的数据之间生成新的节点,新生成的节点将涵盖该特征数据集的变量信息概要。经验内部检验表明,该过程对于违反独立性假设和分布假设均相当稳健,但应尝试了解这些假设符合的程度。
2)利用合并聚类算法对叶结点进行组合,可产生一组不同聚类数的聚类方案。然后,根据AIC (Akaike information criterion)或BIC (Bayesian information criterion)对各种聚类方案进行比较,自动选择聚类个数使聚类方案最优。
2 空域飞行冲突危险性实例验证
2.1 空域飞行冲突危险性指标计算
2.1.1 空域运行状态描述
某年某月某日,在中国境内某管制区发生了一起由于管制员误发高度穿越指令造成的小于间隔事件A。事发前两架航空器在同一航路保持300 m高度差相对飞行,在两机小于20 km时管制员指挥高高度航班下降高度,该指令导致高高度航班存在小于最小水平间隔的情况下穿越低高度航班高度的风险。两机水平间隔小于10 km时出现短期冲突告警,随后开始执行冲突解脱。为了全面描述冲突事件发生时空域的运行状态,以1 s为时间间隔计算了冲突发生前后共1 989个时间片在该冲突扇区内存在潜在冲突航空器对以及实际发生小于间隔航空器对的冲突危险性指标。
2.1.2 小于规定间隔的航空器对冲突危险性
受限于篇幅,这里仅在表3中罗列小于规定间隔的冲突航空器在1751~1777共27个小于最小安全间隔时间片内各冲突指标的加权评分,熵权值依次为0.170 、0.243 、0.166 、0.222 以及0.199。考虑到航空器高度改变具有惯性,机组已经难以立即保持高度,故而管制员采取了高度穿越的方式建立重新安全垂直间隔,致使在此阶段的航空器间的垂直间隔持续剧烈减小,虽然水平间隔先减小后增大但幅度较小,故而航空器间隔带来的危险性持续上升。随着航空器的持续接近水平速度矢量在水平距离矢量上的投影逐渐缩短直至相切时垂直,故而水平接近速度呈持续减小趋势。但航空器的垂直接近速度存在一定的波动,故而接近速度得分在整体下降的背景下出现了几处接近速度危险性的高峰。受益于管制员及时有效的冲突解脱,冲突航空器仅在1751~1764个时间片内保持了汇聚飞行态势,第1765时间片开始航空器航迹便开始分散,航迹夹角带来的危险性下降至0,冲突危险性开始缓解。

表3 小于间隔航空器对冲突危险性
2.1.3 空域飞行冲突危险性
图1中展示了冲突发生空域的空域飞行冲突危险性变化过程,从一个相对直观的角度表现危险性变化趋势。在统计时间范围的前半段,存在冲突的航空器对成零星出现的分布状态,冲突航空器对的危险性变化大致可以分为持续波动以及先增加后减小两类,分别描述了不同的运动态势。从1404时间片开始,冲突航空器对数量陡然增加在1523~1561达到了5对之多,随之而来的空域飞行冲突危险性的增加为后续小于规定间隔事件的发生埋下伏笔。值得注意的是,图中浅色标黄部分即位小于间隔时段的空域冲突危险性,可以看到在该冲突被探测后至小于间隔之前,该冲突所具有的危险性已经大于小于间隔后的部分时段,显然在航空器航迹尚未分散之前虽然其间隔并没有突破相关标准,但其不断汇聚的态势所带来的危险性应当高于不再具有碰撞风险的航迹分散时段。局方目前执行的标准在一定程度上忽略了航空器的动态运动趋势可能带来的危险结果。考虑到每个被探测冲突对具有各异的冲突特征,在进行危险性计算时均被基于信息熵赋予了不同的权值,进而呈现出各异的冲突演化特征。因此,仅通过空域飞行冲突危险性数据的大小来区分具有特异性的冲突环境虽然较为直观,但却是高度概括的、片面且缺乏说服力的。

图1 空域飞行冲突危险性
2.2 空域飞行冲突危险性分级
2.2.1 二阶聚类
为了在考虑不同飞行冲突特征的基础上,更加科学且全面地判断空域飞行冲突危险性,在引入各冲突航空器对飞行冲突危险性特征指标,通过聚类筛选具有共同运行特征的时间片,从而弥补累加得到的加权危险性值对于空域运行过程中大量细节信息的缺失。由于需要区分不同类型的变量对于冲突危险性分级的数据类型差异,采用二阶聚类分析空域飞行冲突危险性分级。数据使用SPSS软件自带的二阶聚类算法进行处理,测量距离采用对数似然,聚类准则选用赤池信息准则,CF树调节准则使用默认值(初始距离更改阈值0、每个叶节点的最大分支数8、最大树深度3)。连续变量选用了每个时间片目标空域内被平均每对被探测航空器对的垂直间隔得分、垂直接近率得分、水平间隔得分、水平接近率得分、航迹夹角得分以及航空器对平均飞行冲突危险性,而类别变量则选用了空域飞行冲突危险性。聚类结果为3类,聚类质量如图2所示,图中显示聚类的凝聚与分离的轮廓测量均值大于0.5,聚类质量良好。
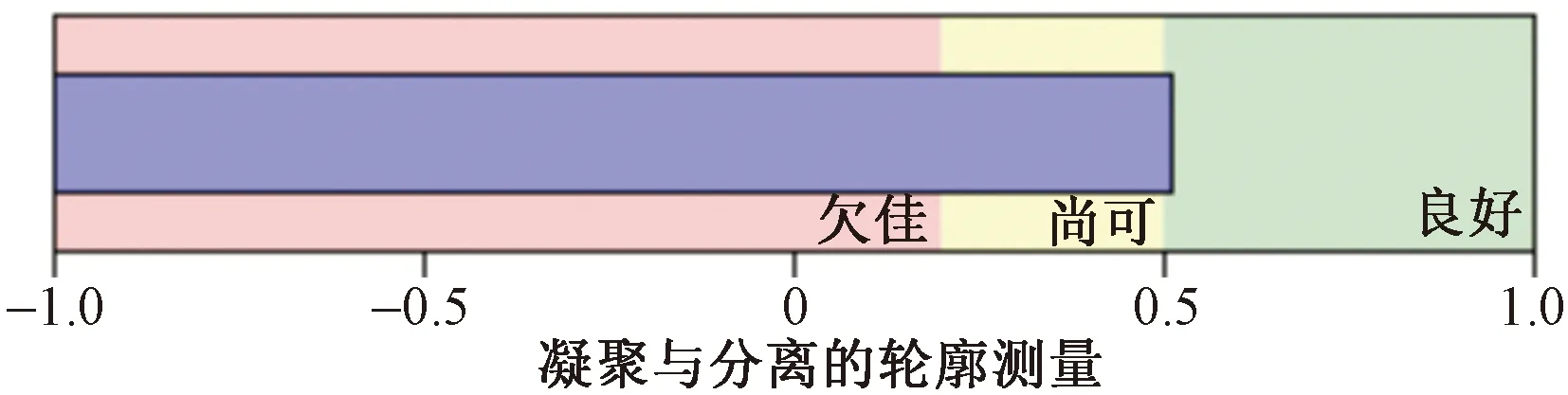
图2 二阶聚类质量
2.2.2 空域飞行冲突危险性聚类
由于计算时间段内存在某些时间片中并未探测到冲突航空器对,故而在上述时间片的飞行冲突危险性值为零,这些时间片在进行聚类时被删去以免影响聚类效果。根据聚类结果的分布特征以及指标数据特征这里将空域飞行冲突危险性的聚类结果进行了分类命名,分别表征了高风险、中风险以及低风险。如图3所示,高风险类的空域飞行冲突危险性往往位居高位且处于上升趋势;低风险类则是表现为当前危险性虽然处于较高位置但处于逐渐好转的状态,没有进一步恶化的空间;中风险则位于上述两类风险之间,危险性虽然处于较低的位置,但危险性趋于震荡,并没有出现明显的缓解趋势,仍然存在造成进一步冲突的可能性。虽然从直观上来看,低风险时间片由于较多地被探测航空器对造成了空域危险性高于中风险时间片,但实际上低风险时间片属于冲突航空器对相遇后的航迹分散阶段,无论是对于航空器还是管制员而言,该种情况均会由于低危险性而享有较低的关注度。

图3 空域飞行冲突危险性聚类结果
进一步结合表4中对于3类风险各项指标的均值统计,从而分析每一类的危险性特征并验证其聚类效果。一方面从航迹夹角指标来看,高风险类时间片的航迹夹角得分为77.98,而中低风险类的航迹夹角得分均小于10,结合水平接近率类似的分布规律,可以明确高风险类的时间片描述了冲突航空器处于航迹交叉或相对的汇聚状态,冲突危险性存在显著的恶化的趋势。另一方面,从间隔类指标来看,由于高风险类时间片涵盖了航空器对从较远处不断接近的过程,故而间隔所带来的危险性均值较低,反观中风险类的平均垂直与水平间隔得分为97.50和16.14,也就是说该类中的航空器对处于近乎同相同的高度但水平间隔相对较远的状态,由于航空器之间存在接近趋势,相同高度所带来的碰撞风险致使该类别的危险性助其被定义为高于低风险时间片的中风险类。综上,聚类结果以及各类数据特征进一步证明了对于飞行冲突危险性因素的累加而成的一维数据,会掩盖多维指标矩阵中蕴含的丰富信息,需要将多维信息共同纳入考量以弥补导致空域飞行冲突危险性判定出现偏差。

表4 3类危险性分类特征
3 结语
飞行冲突危险性的科学评估是空中交通安全管理的重要环节,完善飞行冲突危险性评估体系将有助于提升系统安全性。首先从实际工作出发,筛选表征空域飞行冲突危险性指标体系,划设飞行冲突的探测范围。然后,基于信息熵计算了各类指标对于飞行冲突危险性的贡献程度,给出了赋权后累加得到的飞行冲突危险性值作为后续危险性分级的类别变量。最后,通过实际发生的小于间隔事件空域的飞行数据,计算该空域范围内共1 989个时间片的空域飞行冲突危险性,并在此基础上基于二阶聚类对该空域的飞行冲突危险性进行分级评估。实验结果证明,二阶聚类方法对于空域飞行冲突危险性各特征指标具有较好的区分度,并且相较于以往将飞行冲突危险性直接累加的方法,二阶聚类将更加全面且细致地描述空域飞行冲突危险性的演化过程,为精确描述空域飞行冲突危险性的差异并划分其级别提供了一种行之有效的处理方案。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
西华大学学报(自然科学版)(2022年2期)2022-03-17
军民两用技术与产品(2021年10期)2021-03-16
环球时报(2021-02-01)2021-02-01
科技视界(2020年8期)2020-05-18
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年6期)2016-11-16
太空探索(2016年3期)2016-07-12
太空探索(2016年8期)2016-07-10
