基于自适应滤波算法的牵引网谐波电流检测
2021-06-24 07:30:36白群赵闻蕾
大连交通大学学报 2021年3期
白群,赵闻蕾
(大连交通大学 电气信息工程学院,辽宁 大连 116028)*
在电气化铁道谐波补偿整体流程中,补偿电流(即谐波电流)检测环节直接影响后续环节补偿效果.为了达到牵引网供电系统检测谐波速度快、精准度高的要求,选择了闭环连续调节的自适应检测系统.自适应检测系统通过闭环完成迭代更新,具有较好的抗噪性与鲁棒性,即使牵引供电系统电流电压产生突变后仍能正常完成检测[1-2].由于该检测系统结构简单,计算量小,具有较好的实时性和跟踪性,现已被广泛应用于系统辩识和噪声对消等领域中.
自适应滤波器最早采用由威德罗(Widrow)和霍夫(Hoff)共同提出的最小均方算法(Least Mean Square,LMS),因该算法方便计算而广泛应用到工程实际中.因其固定步长的算法无法同时满足收敛速度和稳态精度的要求,文献[3]在最小均方算法固定步长的基础上提出了一种变步长LMS算法其中步长的幅值改变基于sigmoid函数;文献[4]基于文献[3]的变步长函数提出了类sigmoid算法,降低了步长函数计算的复杂度;文献[5]提出了基于箕舌线函数的变步长算法,此函数特点在于没有指数运算环节,但稳态精度与文献[4]相差无几;文献[6-7]分别采用了双曲正割与双曲正切函数,各自引入了参数ϒ和h来改善该函数形状特性,使函数底部变化平缓,具有更小的稳态步长.以上文献或是在保持较大步长的前提下降低了算法计算复杂度,但忽略了稳态稳定性;或是具有较高的稳态精度而没有考虑收敛速度.
根据上述文献中学者对变步长LMS算法的研究,本文提出了结合双曲正割函数与双曲正切函数的变换步长的检测算法,对上述文献算法与本算法进行仿真,并分析各种方法的电流检测效果.
1 自适应滤波电流检测的原理
自适应滤波的原理是基于威德罗提出的自适应噪声对消技术(Adaptive Noise Canceling Techn-ology, ANCT),其原理框图如图1所示.

图1 自适应滤波的原理框图
滤波系统包括两个输入信道:原始信号和参考信号.其中,原始信号包括源信号s和噪声信号n0,s和n0不相关,参考信号n1与n0相关.n1通过自适应滤波器算法处理后,得到与n0相近的噪声信号y,通过减法器相减抵消原始信号中的n0,得到消除了噪声信号的源信号.同时将减法器输出的误差信号e实时反馈给自适应滤波器,不断更新滤波器输出值,使其更接近n0,达到最佳的噪声对消效果.
在牵引供电系统中,假设牵引负载的非正弦周期性电流为:
=i1(t)+ih(t)
(1)
式中,i1(t)为基波电流,ih(t)为谐波电流,θ为电流相位,k为谐波次数.
以采样周期Ts对负载电流iL(t)离散化采样,上式可改写成:
(2)
式中,n为采样时刻,iL(t)为负载电流抽样值,i1p(n)和i1q(n)分别为基波有功和基波无功分量,ih(t)为谐波电流总和.
牵引网电压经锁相环分离后输出的标准正余弦信号x1(n)、x2(n)作为参考输入信号,用矢量表示为x(n)=[x1(n),x2(n)]T.
基于ANCT原理,将基波电流信号i1(n)作为噪声信号,以x1(n)、x2(n)为参考输入的信号经自适应滤波器后输出信号y(n),通过调整与x(n)对应的权值向量w(n)=[w1(n),w2(n)]T,使迭代运算过程中的y(n)无限接近i1(n),再令原始信号iL(n)与y(n)作差即可得到需要检测的谐波电流ih(n)[9].
综上所述,基于ANCT的谐波电流检测算法为:
(3)
2 基于ANCT的算法分析
2.1 传统算法
2.1.1 最陡下降算法
由自适应滤波器模型可知,其输出信号为:
(4)
输出误差为:
e(n)=d(n)-y(n)=d(n)-wT(n)x(n)
(5)
误差平方为:
e2(n)=d2(n)-2d(n)wT(n)x(n)
+wT(n)x(n)xT(n)w(n)
(6)
定义均方误差为:
J(n)=E[e2(n)]
=E[d2(n)]-2wT(n)P+wTRw(n)
(7)
式中,P=E[d(n)x(n)]为原始信号和参考信号的互相关矩阵,R=E[x(n)xT(n)]为参考信号的自相关矩阵.
对均方误差求梯度得:
(8)
令式(8)中梯度向量为0,即可求得式(7)的最小权值向量:
wmin(n)=R-1P
(9)
将式(9)带入到式(7)中得到使其成立的最小均方误差为:
J(n)min=E[d2(n)]-wminT(n)P
(10)
最陡下降算法是使权值沿着均方误差最小的梯度方向运动的[10],即:
w(n+1)=w(n)-μ∇J(n)
(11)
式中,μ为自适应算法的迭代步长.
2.1.2 最小均方算法
由于获得最陡下降法中参考输入信号的自相关矩阵R和期望信号的互相关矩阵P有很大难度,所以最陡下降算法在自适应滤波环节中不常使用.因此,威德罗和霍夫提出了LMS算法,该方法采用瞬时平方误差e2(n)、R和P的瞬时估计值来估计梯度向量.
R和P的瞬时估计值为:
(12)
可得梯度向量的瞬时估计值为:

(13)
权值更新公式为:
w(n+1)=w(n)+2μe(n)x(n)
(14)
为使算法收敛,步长μ应满足:
(15)
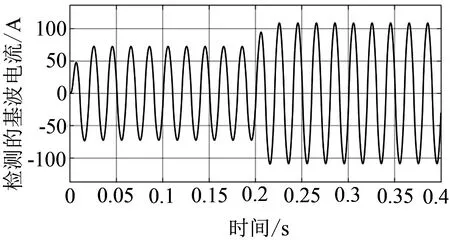
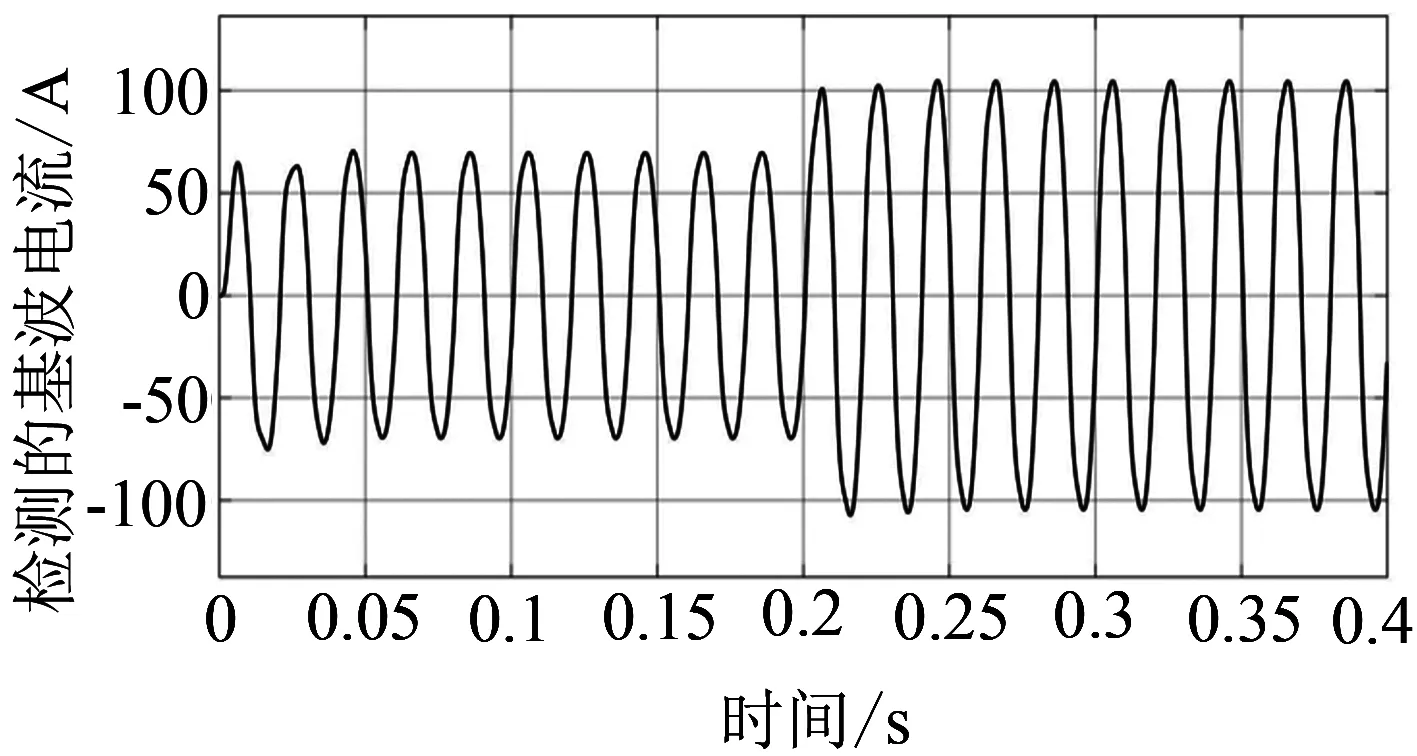
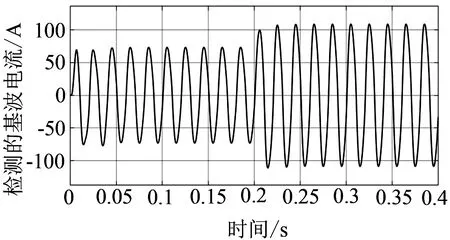
式中,λmax为参考输入信号的自相关矩阵R的最大特征值,因实际中不容易得到,且λmax (16) 因为LMS算法具有原理简单、参数少的特点,被应用在自适应滤波器中.但权值更新向量取自于仍受谐波污染的误差e(n),使系统的权值系数接近最佳权值时,误差e(n)仍旧存在,权值将继续波动,无法保持稳态.并且LMS算法中使用固定步长,如步长取值较小,则算法收敛速度慢;若选择的步长能够使系统有较快的收敛速度,会导致稳态失调误差较大.因此,初始收敛速度和稳态精度无法在始终一致的步长情况下被满足,多数实验对步长进行折中选择,无法使算法具有优越性.为此,已有学者提出多种变步长LMS算法,使LMS算法在谐波检测中具有更强的适用性. 基于sigmoid函数的变步长公式为[3]: (17) 式中,α控制μ(n)的形状,决定函数曲线的变化率;β控制μ(n)的范围,使μ(n)不会超过β/2. 在sigmoid函数算法的基础上提出了新的类sigmoid算法,其步长计算公式为[4]: μ(n)=β(1-exp(-α|e(n)|2)) (18) 该函数同样可通过调节参数α、β来调整函数形状及范围. 基于箕舌线的变步长LMS自适应算法的步长更新公式为[5]: (19) 双曲正割函数改进步长表达式为[6]: (20) 参数γ的作用与α类似,调节误差接近于零时的函数形状. 双曲正切函数变步长公式为[7]: (21) 引入参数h可改善函数形状,使函数取值接近零时变化率较小. 通过设置上述五种函数的可变参数,使步长取值在近似范围内,整合的函数曲线如图2所示.观察图2中函数形状,sigmoid函数和双曲正割函数在初始跟踪阶段的变化速率大,双曲正割函数的收敛速度更快,且这两个函数在e(n)≈0时都仍具有较大的步长,影响检测系统的稳态精度.类sigmoid函数和箕舌线函数的初始收敛速度相对于sigmoid函数和双曲正割函数略有下降有,在趋近于稳定状态展现出类似的步长变化趋势,函数底部变化更为平缓.双曲正切函数整体变化速率较慢,如若进一步调整参数h可获得更为平缓的稳态步长变化趋势,满足较高的稳态精度要求. 图2 整合的五种函数曲线图 通过现有学者对各类变步长函数的优劣分析,本实验采取了将两种特点不同的函数结合的改进变步长LMS滤波算法.利用双曲正割函数初始跟踪阶段较快的收敛速度和双曲正切函数较高的稳态精度相结合,利用某一特定误差值作为判别条件进行变步长函数切换,切换过程原理如图3所示. 图3 变步长函数切换原理图 通过设置一个特定的误差值e0,作为两种变步长函数切换的分界点.当供电系统发生突变时,检测环节需快速应对系统电流变化,此时选择跟踪速度快、收敛实时性好的基于双曲正割函数的LMS算法;当误差的绝对值e(n)小于给定值e0时,切换为基于双曲正切函数的LMS算法,该算法下稳态步长较小,不易发生震荡,有利于系统保持原有的稳定状态或达到新的稳态.基于双曲正割和双曲正切函数的定误差切换过程如图4所示. 图4 变步长切换过程图 实验设置负载电流在0.2s发生突变,借此可直观观察到电流从稳态-突变-另一稳态的过程.图5为过程中负载电流变化曲线,图6~图8分别为基于传统LMS算法、基于双曲正割函数的LMS算法和基于双曲正切函数的LMS算法的基波检测电流波形图. 图5 负载电流 图6 基于传统LMS算法的检测电流 图7 基于双曲正割函数算法的检测电流 图8 基于双曲正切函数算法的检测电流 通过观察上述三种不同算法下的检测波形图,可发现,相对于传统LMS算法,基于双曲正割函数的变步长算法的检测实验收敛速度比传统LMS算法更快,但在变化产生的第一个电流周期后半段可见检测电流比实际电流略大,检测过程稳定度欠佳.而双曲正切函数由于初始步长较小,收敛过程在突变后第四个周期才完成,收敛速度慢,但稳定性好. 结合了双曲正割与双曲正切函数的改进变步长算法检测波形如图9所示,从波形图中可以看出在突变发生后第二个周期波形已经稳定,该方法应对突变的跟踪速度和稳态精度均优于单独的变步长算法,与前文的理论分析保持一致. 图9 基于改进算法的检测电流 本文针对牵引供电系统中牵引负荷实时变化的特性,通过分析传统固定步长和多种变步长LMS自适应滤波算法基础上,结合两种变步长函数,提出了一种改进的滤波算法,该算法结合双曲正割和双曲正切函数的优点,兼具快速跟踪能力和稳态保持能力.通过实验仿真分析,证实了该改进的算法收敛速度快,跟踪性能好,在电气化铁路系统等时变系统具有良好的适用性.2.2 变步长自适应谐波检测算法
2.3 改进的变步长LMS算法

3 仿真分析


4 结论
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:24
军事文摘(2021年22期)2022-01-18 06:22:48
核科学与工程(2021年4期)2022-01-12 06:30:04
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
煤气与热力(2021年4期)2021-06-09 06:16:54
华东师范大学学报(自然科学版)(2020年1期)2020-03-16 03:14:55
中华戏曲(2020年1期)2020-02-12 02:28:18
数学物理学报(2017年3期)2017-07-01 16:18:49
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:40
河北科技大学学报(2015年5期)2015-03-11 16:16:37