禽蛋工业化腌制温度控制方法设计
2021-06-22 03:13陈艳芳
机械与电子 2021年6期
陈艳芳
(河源职业技术学院,广东 河源 517000)
0 引言
在腌制禽蛋中[1-2],传统腌制方法的腌制周期太长,春秋季需要40~50天,即使夏季也需要20~30天。相关研究表明,禽蛋腌制过程中食盐主要成分NaCl会从腌制液逐渐渗透到禽蛋内部,导致禽蛋内部的物理结构和化学成分含量发生变化。为改善禽蛋腌制品质、提高生产效率、降低生产成本,可考虑改进禽蛋腌制方法,如控制腌制温度,使用食品添加剂、脉动压技术和超声波技术等[3-4]。其中,食品添加剂会影响禽蛋口感而且不符合健康饮食理念;超声波技术容易造成禽蛋破裂而且设备成本比较高。考虑到腌制温度是影响NaCl渗透速率的关键因素,温度可以直接影响禽蛋的腌制周期和质量。因此,选用恒温控制方案,既可以保持传统腌制口感又可以缩短腌制周期,同时设备成本比较低,大多数生产厂家都可以接受。
所谓恒温腌制就是在腌制过程中使用恒温装置确保腌制缸温度基本保持稳定。对于恒温控制系统,普遍使用PID控制算法,该算法在面对非线性、时变性等问题时很难取得比较理想的控制效果。随着智能控制理论不断发展、完善,其在工业领域的应用十分广泛[5-8]。本文将滑模控制算法应用到禽蛋腌制温度控制系统,以解决温控系统的非线性、滞后性等问题,并进行仿真和试验研究。
1 禽蛋工业化腌制温度控制系统
所设计的禽蛋腌制系统主要包括腌制装置、加热系统、管道系统和控制系统等。各个模块有机结合、按需工作,可实现腌制液内外循环控制、温度控制等。其中,腌制装置由腌制房和配液池组成,可完成腌制液的浓度检测和更换;管道系统由不锈钢管道、水泵和电池阀等元件组成。本文以加热系统为研究对象,以自制禽蛋腌制装置为试验平台,该平台搭载腌制箱、电加热炉、温度传感器和调压模块等。通过控制系统实现整个腌制装置的温度控制,禽蛋腌制装置温度控制系统结构如图1所示。
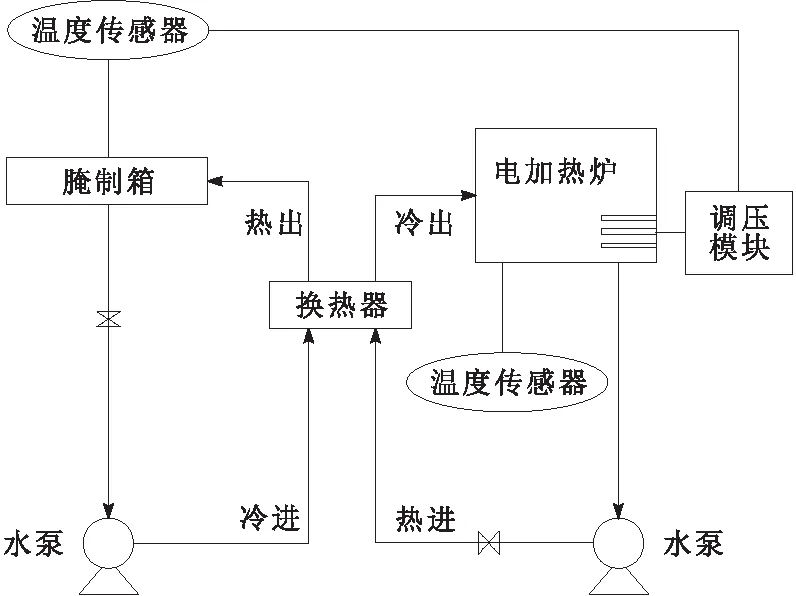
图1 禽蛋腌制装置温度控制系统
如上所述,以禽蛋腌制装置中的电加热炉为被控对象,利用调压模块实现电加热管工作电压的调节,改变电加热管功率,进而调整炉水温度;通过换热器调节腌制装置内部腌制液的温度。由分析可知,在电加热炉水温变化到腌制液温度变化中,明显存在一个滞后环节。除此之外,炉水温度调节具有一定的非线性,因此需要选用智能控制算法解决非线性和滞后性等问题。
2 恒温控制器设计
禽蛋腌制过程温度控制系统可使用非线性微分方程进行描述,即
(1)
K为静态增益;T为时间常数;τ为滞后常数;x(t)为t时刻系统输出值;u(t-τ)为t-τ时刻温控系统输入控制量。

(2)
定义温度偏差e(t)为
e(t)=r(t)-x(t)
(3)
r(t)为设定温度;x(t)为实际温度。
本文选用积分型滑模面函数[9-10],即

(4)
c1为常数且满足c1>0。上述滑模面函数的一阶微分表达式可描述为
(5)
同理,二阶微分表达式可描述为
(6)


(7)
进一步,滑模面函数的三阶微分表达式为
(8)
结合式(7)可得
(9)
如果将式(9)代入式(8),就可以得到滑模变结构控制的三阶微分动态方程[11-13],即
(10)

(11)
定义中间控制量为υ,其是关于控制量u的函数,即
(12)
式(11)移项,则有

(13)

(14)
其中,控制律增益β1>0、β2>0且可使三阶以下滑模面函数全部为0。
3 仿真和试验
3.1 仿真分析
为验证所述方法的有效性,本文首先对系统进行仿真研究。采用阶跃响应法实现系统模型的辨识,禽蛋腌制温控系统的数学模型可描述为
(15)
作为对比,本文分别采用三阶滑模控制和常规PID控制对腌制温控系统进行仿真,仿真结果如图2所示。由仿真结果可以看出,采用所述三阶滑模控制算法可取得比较理想的控制效果。与常规PID控制相比,该算法在稳定性、超调量和调节时间等方面均具有一定优势。
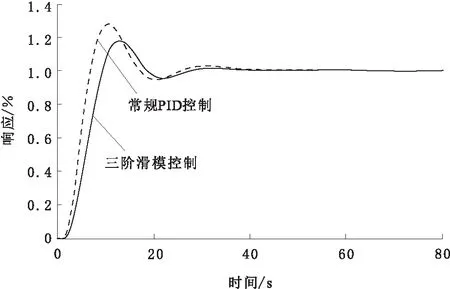
图2 仿真结果
3.2 试验研究
进一步地,本文进行了相关试验研究,禽蛋腌制装置选用华中农业大学设计的钢混结构咸蛋快速腌制系统,如图3所示。腌制系统选用接触式温度变送器,具体型号为STH-TF型,分布在腌制装置的3个温度变送器处,取其平均值作为禽蛋腌制液实际温度。电加热炉内液体测温选用同型号温度变送器,分布在水箱上、中、下3个部位,取其平均值作为热水实际温度。
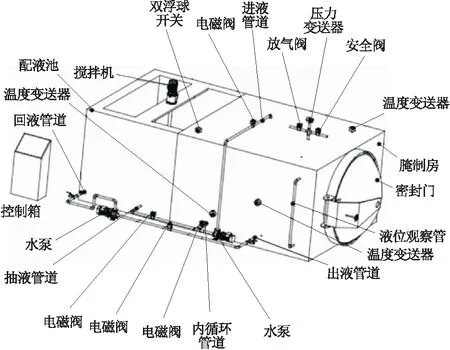
图3 禽蛋快速腌制系统
工艺流程可描述为:准备新鲜禽蛋,照检、洗蛋并晾干;在配液池中添加浓度为19%的食盐水;将禽蛋放入腌制房并关闭密封门;将食盐水注入腌制房;加热腌制房内食盐水并保持在某个温度;抽样检查[14]。
在同一环境下,1号腌制装置采用三阶滑模控制算法;2号腌制装置采用常规PID控制算法。腌制液初始温度均为19 ℃,设定温度为25 ℃;试验持续20 min,每隔2 min记录1次数据;系统运行稳定后,在第7 min引入扰动,探究温控系统的抗干扰能力。部分试验数据如表1所示,试验数据波形如图4所示。
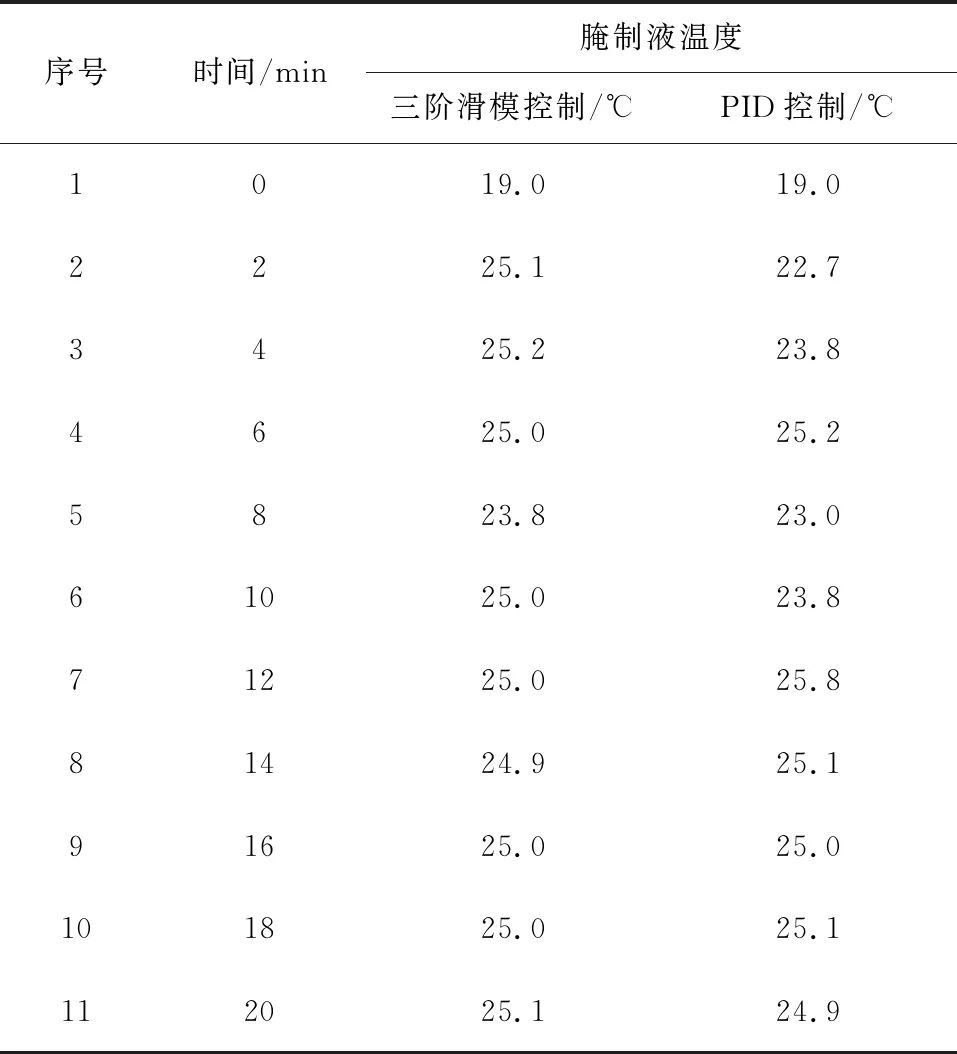
表1 试验数据(部分)
由图4可以看出:

图4 试验数据波形
a.采用三阶滑模控制的1号腌制装置,会比采用常规PID控制的2号腌制装置提前2 min到达稳定状态。
b.三阶滑模控制的上升时间为2 min,超调量为1.2%,调节时间为5 min;而采用常规PID控制的上升时间为3.5 min,超调量为4%,调节时间约为7 min。
c.受到扰动影响后,三阶滑模控制会更快地恢复稳定状态。
常规PID控制在处理非线性、滞后性等问题时,其局限性非常明显,超调量大、调节时间长。而三阶滑模控制不仅可以适应被控对象的不滞后性、非线性以及干扰因素,而且能够避免常规滑模控制的抖动问题,因此其收敛速度快、超调量比较小。整体来说,采用三阶滑模控制,腌制温度会更加平稳,温度调节更加迅速,温差比较小,实际温度和设定温度之间的偏差小于0.5 ℃。
4 结束语
以禽蛋腌制过程温度控制为研究对象,通过设计一种三阶滑模变结构温度控制器,解决了禽蛋腌制过程温度不恒定的问题。所述恒温腌制装置既可以保证禽蛋口感,又可以缩短腌制周期。但是,所述控制算法实现过程比较复杂,需要使用ARM、DSP、PC机等控制器,很难在PLC中实现。下一步,可考虑简化算法实现步骤,提高其适用性。
猜你喜欢
数学物理学报(2022年2期)2022-04-26
原子与分子物理学报(2020年5期)2020-03-17
世界有色金属(2019年21期)2020-01-09
湖南饲料(2019年5期)2019-10-15
新农业(2018年6期)2018-04-18
电子制作(2016年15期)2017-01-15
新农业(2016年15期)2016-08-16
工业设计(2016年6期)2016-04-17
通信电源技术(2016年4期)2016-04-04
山西大同大学学报(自然科学版)(2016年6期)2016-01-30