
基于脑电和肌电信号的下肢运动意图识别方法
2021-06-17 13:32:50郑长坤王海贤顾凌云张弛汪丰
中国医疗设备 2021年5期
郑长坤,王海贤,顾凌云,张弛,汪丰
东南大学 生物科学与医学工程学院,江苏 南京 210096
引言
据相关统计,我国老龄化现象极为严峻[1],同时下肢受到意外伤害的状况也不容乐观,这类人群的下肢生理功能会逐渐衰退,下肢的正常功能受损。近年来兴起的通过穿戴下肢外骨骼机器人来进行康复助行的方式具有良好的前景,随着神经电信号如脑电图、肌电图等采集检测技术的高速发展,为下肢外骨骼机器人提供了新的控制策略[2]。
人体运动是由大脑产生意志、经脊髓层产生运动相应的模式和反射神经精细化控制的过程[3]。和物理传感器采集的信号相比,生物电信号能够更及时、主动地反馈穿戴者的运动意图。人体在进行下肢运动时,是由以大脑为中枢神经系统的中央模式生成器产生运动开始意图,控制下肢骨骼和肌肉执行相应的动作。
通过脑电采集装置,从大脑皮层采集的脑电信号(Electroencephalogram,EEG)直接反映了人体运动的意图决策,脑电信号控制具有初始、全局性的特点但由于大脑控制身体的绝大多数任务活动,从中提取单独动作指令非常困难[4]。EEG是一种非平稳的微弱生理电信号且与运动相关的脑电信号处于特定频段,共同空间模式[5]、小波分解[6]等是有效提取EEG特征信息的方法。
从人体骨骼肌表面通过表面生物电极采集的肌电信号(Electromyogram,EMG)反映了人体神经肌肉活动的功能状态,是大脑意识最直接的反应,充分体现了人体的意图。肌电信号控制具有直接、自然的特性。下肢不同的运动模式对应不同肌肉的激活,提取到合适的表征信号特点的特征有利于提高后续分类识别的准确率。时域特征表征了下肢肌肉实时的活动状态[7];频域特征反映了信号频率维度的变化[8];时频域特征则结合时域和频域的特性对信号进行分析[9];样本熵作为混沌特性的特征,反映时序信号的复杂度[10]。
本文基于EEG和EMG对下肢运动进行识别,将EEG用于检测下肢有无开始运动的意图,利用小波分解方法从与下肢运动相关的EEG频段中提取小波系数及能量特征。再将特征输入至支持向量机(Support Vector Machine,SVM)二分类器中处理,识别运动开始意图的有无。将EMG用于检测下肢具体的动作模式,本文提取EMG的时域、频域、时频域以及样本熵等多种特征进行分析。得到EMG特征后,将其输入至极端梯度提升(eXtremeGradientBoosting,XGBoost)多分类器中,对六种下肢运动模式进行分类。
1 实验设计与采集
1.1 实验环境搭建
本实验基于TeamE-001系统搭建下肢运动采集系统,采集受试者进行不同下肢运动模式时的脑电信号和肌电信号。采集系统包含:电脑提示器,以路由器作为无线接入点的无线传输部分、脑电放大器、肌电放大器、脑电盐水湿电极帽以及肌电电极片如图1所示。脑电电极根据国际10~20标准选取 8个电极 FP2、FZ、C3、CZ、C4、PZ、O1、O2;根据下肢运动参与主导作用的肌群,选择四块肌群股外侧肌、股直肌、股内侧肌和腓肠肌作为EMG采集电位,见图2。EEG和EMG的采样频率均为1000 Hz。

图1 采集系统图

图2 电极位置示意图
本实验需采集人体进行站立、行走、上下楼梯、上下斜坡运动时的EEG和EMG,为了方便采集及保证每次实验的运动一致性,搭建了固定高度的楼梯及斜坡,实验环境如图3所示。
1.2 实验范式
借鉴经典的脑机接口实验范式[11-12]并结合实际信号采集需求,实验采用听觉刺激范式,以“行走”“站立”“上楼梯”“上斜坡”等提示音引导受试者完成实验。
以“行走”实验为例:受试者初始状态为站立。实验开始,进入第一次实验,电脑播放蜂鸣声提示受试者本次实验开始准备完成相应的动作,等待1 s后,播放“行走”语音提示受试者开始行走,受试者常速行走4 s然后播放“站立”提示受试者单次实验结束进入站立静止状态,2 s后进入下次实验。完成20次为一组实验,每个动作进行10组,组间休息为3 min,实验范式如图4所示。

图4 实验范式示意图
2 基于脑电信号的运动意图识别方法
2.1 脑电信号的预处理
采集到的原始脑电信号后,根据时间标签分割信号。未开始运动时的脑电信号作为无运动意图的脑电信号;开始行走、上下楼梯、上下坡等运动时的信号段作为有运动意图的脑电信号。与运动相关的EEG频率主要集中在0.5~35 Hz之间,在分割原始的脑电信号后,使用0.05~40 Hz带通滤波器进行滤波再通过小波阈值法去噪。
小波阈值去噪法是对信号小波分解后系数中绝对值较小的系数置零,保留或者收缩较大的系数,求得小波系数的估计[13],达到在最小均方误差下最优,从而对信号起到较好的去噪效果。小波阈值去噪法的简述如下:
(1)设f(t)是N个点的离散含噪信号,则离散含噪声函数,见公式(1)。

其中,s(t)是原始信号,n(t)是服从N(σ2)的高斯白噪声。
采用Mallat算法对f(t)进行正交小波变换分解,得到小波系数dj,k和尺度系数cj,k,见公式(2)。

(2)对信号进行小波分解后的系数进行处理,阈值使用VisuShrink[14]法则,见公式(3)。

其中,σ=MAD/0.6745,MAD为首层小波分解系数绝对值的中值,N为信号采样长度。使用软阈值方法,得到阈值处理后的信号s,见公式(4)。

其中,x为小波分解后系数,λ为阈值。最后将处理后的系数重构得到信号估计值。
2.2 小波分解的系数和能量特征提取
EEG作为一种非平稳随机信号,具有较强的节律性。当人在完成实际动作时,会出现ERS/ERD现象[15],这种运动相关的信号在不同频段上有更加明显的划分,因此选用小波分解的方法构造特征向量,在与运动相关的频段上获取意图特征信息。
(1)小波分解的系数特征。对信号进行k级小波分解,设k1,k2,…,kn共n个与下肢运动相关的脑电信号子频段,则对这n个有限长序列取均值得到n个系数的均值X1,X2,…Xn,见公式 (5)。

其中,i∈[1,n],yi(k)表示第i段子频段第k个点(k=1,2,…,m)个点的幅值,Ni为第i段子频段长度。
(2)小波分解的单位时间能量值特征。除系数特征外,能量值也能在一定程度上反映脑电信号的特征信息。定义子频段的能量值为采样点幅值平方和。
与下肢运动相关的脑电信号频段k1,k2,…,kn采样时间为ts,对应的单位时间能量值P1,P2,…,Pn,见公式(6)。

设脑电数据有M个通道,每个通道选取分解后的n个相关子频段,那么结合小波分解系数和能量值特征,构造含有2*M*n个特征值的特征向量。
2.3 支持向量机
SVM是基于小样本统计学理论和最小化结构风险的机器学习方法[16],SVM算法的目的是在特征空间中寻找最优超平面,使得不同类别的样本与超平面的距离尽可能大。
采用径向基核函数的SVM的最优决策函数,见公式(7)。

其中,N表示支持向量个数,K(xi,x)为核函数,(xi,yi)为训练样本数据,αi为Lagrange乘子,b为分类阈值。
3 基于肌电信号的运动模式识别方法
3.1 肌电信号的预处理与特征提取
肌电信号频率通常在10~500 Hz[17],采集到原始的信号后对EMG进行50 Hz陷波处理,并使用2.1节中小波阈值去噪法去除噪声。
为了获取能够表征EMG特点的参数,便于后续分类器的分类识别。本文从时域、频域、时频域以及混沌特性等不同角度提取EMG的特征,组合多种特征对信号进行分析,具体提取的EMG特征如表1所示。

表1 肌电信号特征提取
3.2 肌电信号的分类
完成对EMG的特征提取后,需要对6种运动模式进行分类以识别出下肢运动类型。SVM常作为一种二分类器,若要对6种不同运动模式分类,根据one-versus-one策略需要训练15个分类器进行识别,计算代价相当大。因此,本文利用集成学习中的XGBoost方法,搭建多分类器。
XGBoost是集成多个CART回归树形成的强分类器[18],将这多个树结果的和作为预测值,XGBoost算法的简述如下:
假设样本集有n个样本,m维特征,其中xi,yi表示第i个样本和其标签,回归树D和其空间F如公式(8)~(9)所示。

XGBoost最终预测公式如公式(10)所示。

4 实验结果和分析
4.1 下肢运动启动意图识别
通过对两类脑电信号进行分类,以识别出脑电信号中蕴含的下肢运动启动意图。使用预处理方法对脑电信号去噪,C3、C4通道预处理前后的EEG信号如图5所示。得到相对纯净的EEG后,使用db6小波函数对EEG的8个通道信号进行三层小波分解,提取分解后尺度2、3高频分量的小波系数和小波能量特征,形成32维特征向量。CZ通道的小波系数特征值分布如图6所示。选取80%数据作为训练集输入至SVM分类器中训练;20%数据不参与训练,用于测试模型准确率,通过网格遍历和十折交叉验证法对SVM惩罚参数c和核函数γ寻优。分类结果如表2所示。
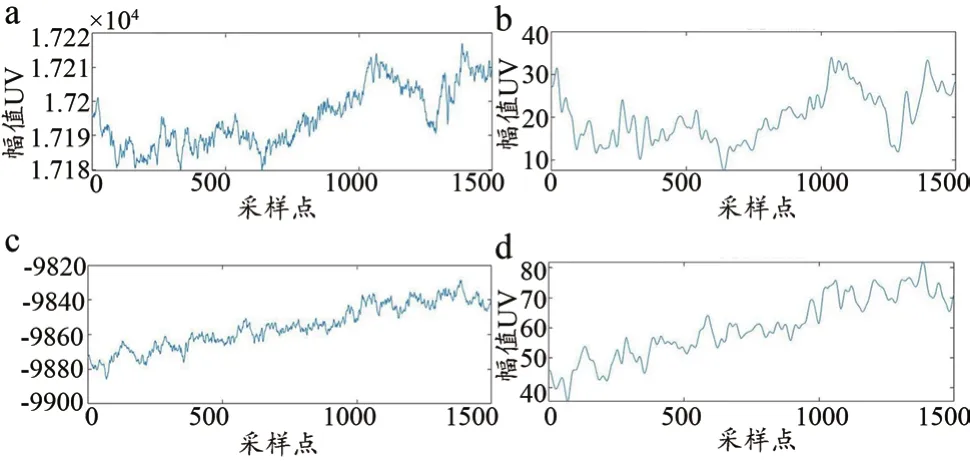
图5 脑电信号预处理

图6 CZ通道小波系数特征值分布图

表2 基于SVM的脑电信号分类结果
从表2可以看出,对于有无运动意图两种状态的脑电信号的识别率均在91%以上。说明本文使用的方案在识别下肢运动启动意图有较高的可靠性和准确度。
K-最近邻、二次判别分析、决策树等分类识别方法广泛应用于脑电信号的分类,为了验证本文使用方法的效果,将提取的脑电特征向量输入上述分类器中,分类性能如表3所示。比较各分类器的准确率、精确率、召回率以及F1值,可以得出本文使用的SVM分类方法优于上述分类器。

表3 不同分类器的EEG分类性能(%)
4.2 下肢运动模式识别
采集人体进行站立、行走、上下楼梯和上下坡共6种状态下的EMG,经过预处理后的六类动作肌电信号如图7所示。根据3.1节的方法提取肌电信号8个通道的特征,形成352维特征向量。图8为EMG的特征值分布图,可以看出肌电信号在时域、频域、时频域和混沌特性上均有一定的可分性。

图7 股直肌通道肌电信号图

图8 肌电信号特征值分布图
选取70%的数据作为训练集用于训练XGBoost分类器,30%数据不参与训练用于测试模型的准确性和泛化能力。对站立、行走、上下楼梯、上下坡共6种下肢运动模式进行分类,分类结果如表4所示。

表4 基于XGBoost的肌电信号分类结果
从表4可以看出,对动作站立、上楼梯和下坡的平均识别率达到94.67%以上,全部动作的平均识别率均达到了90%以上。说明本文使用的肌电信号多分类方法的有效性。
随机森林、GDBT等集成学习方法常用于肌电的分类识别中,为了验证本文的分类效果,将提取到的EMG特征向量输入进上述分类器中,结果如表5所示。可以看出XGBoost方法结果最优。

表5 不同分类器的EMG分类性能(宏平均结果%)
4.3 融合脑电和肌电信号的下肢运动意图识别
融合脑电和肌电信号对人体下肢运动意图进行识别,将脑电信号用于下肢运动启动的判断,肌电信号用于识别具体的下肢运动类型,对一段同步采集的EEG和EMG处理结果如图9所示。由于大脑作为指令的发出者,基于EEG的识别在时间上具有优势;由表4可以得出,肌电信号在用于识别具体的运动类型时较为准确。因此融合EEG和EMG对下肢运动进行识别,可以在提高识别效率的同时保证较高的分类准确性。

图9 融合EEG和EMG的下肢运动识别结果
5 讨论
脑电信号是非平稳的信号,以往基于EEG的下肢运动意图识别多为运动想象任务[19],本文对下肢实际运动切换时的EEG进行研究,利用与下肢运动相关的信息反映在EEG特定频段的特性,使用小波分解方法在特定频段上提取更为有效的EEG特征,获得了较高的识别准确率。肌电信号是运动信息最直接的表现,提取EMG简单的时域、频域特征[20]无法满足多种下肢运动状态的精准分类,本文增加了表征时频特性的小波特征和表征信号复杂程度的样本熵特征,能够准确区分多种不同的下肢运动状态。本文使用的EEG识别方法对下肢运动有无运动意图的平均准确率达到93.2%,使用的EMG识别方法对下肢动作类型的平均准确率达到93.6%。为了获得人体意图,相关研究多为单一的基于EEG[21]或EMG[22]识别,本文通过融合EEG和EMG信号对下肢运动识别,脑电信号在反映运动模式的切换上具有优势而肌电信号在表征具体的下肢动作上准确迅速,识别到运动开始的意图可以使外骨骼机器人与人体形成更为紧密的交互;对运动模式的准确分类保证了下肢外骨骼的正确助力。融合二者对下肢运动识别可为下肢外骨骼设备提供一种更有效的控制策略。
在实际应用中,为了更精准的捕获人体下肢运动状态,可以在EEG和EMG等生理电信号基础上融合其他模态的信息,如增加足底压力传感器、膝关节角度传感器获取步态信息;增加运动惯性传感器获得相关姿态信息。多模态信息融合的控制策略将大大提升外骨骼机器人助行康复的效率。
6 结论
人体下肢运动种类复杂,本文选择了六种日常生活中频度较高的下肢运动动作进行研究。通过模式识别方法解析脑电信号包含的下肢运动开始意图,识别肌电信号表征的具体动作类型。本文提出了基于SVM的EEG识别方法和基于XGBoost的EMG识别方法。提取EEG的小波系数和能量构造组合特征,利用SVM分类器对脑电信号中有无运动意图分类;提取EMG的时域、频域、时频域和复杂度等多维度特征,构建XGBoost分类器对EMG进行识别。二者的平均准确率均达到了92%以上。本文所提出的算法能够准确识别人体下肢运动相关意图。
由于现实场景复杂、生理电信号的非平稳性,建立性能稳定的人机交互平台难度较大。同时EEG和EMG的在线识别也待进一步研究,实时识别对算法的计算效率和抗干扰能力也有更高的要求。为了应用在临床助行康复中,还需要制定更为完善的决策策略,以保证下肢外骨骼安全有效的助力。
猜你喜欢
法律方法(2022年2期)2022-10-20 06:42:20
福建基础教育研究(2022年4期)2022-05-16 08:48:40
成都信息工程大学学报(2021年4期)2021-11-22 07:44:40
法律方法(2021年3期)2021-03-16 05:56:58
科技传播(2019年24期)2019-06-15 09:29:28
雷达学报(2018年3期)2018-07-18 02:41:34
北京航空航天大学学报(2017年9期)2017-12-18 07:12:22
火控雷达技术(2016年1期)2016-02-06 02:17:55
无线电通信技术(2015年3期)2015-12-23 11:37:02
电测与仪表(2015年3期)2015-04-09 11:37:24
