航天器中继天线跟踪角度实时预算方法
2021-06-17 12:08黄克武
电子科技 2021年7期
黄克武,朱 珂,张 伟,齐 鑫
(中国空间技术研究院 载人航天总体部,北京 100094)
航天器天基测控通信是指在航天器系统与中继卫星系统间建立的天地通信中继传输链路,可以为航天器飞行任务执行提供测控与通信保障。在国际空间站及我国空间站建设中,天基测控通信已作为载人飞船、货运飞船、空间站各舱段的主要测控通信手段。其中,中继天线承担着建立航天器与中继卫星系统之间通信链路的桥梁作用,负责指向中继卫星从而为建立中继S、Ka双频段的测控通信链路创造前提条件[1-4]。
中继天线为伺服驱动型反射面天线,其指向角度的准确性决定了中继链路的稳定性和可靠性[5-7]。在地面测试和在轨应用时,对中继天线的指向角度进行实时预算和验证,进而判断各种复杂工况下中继天线伺服机构工作的设计正确性和执行准确性,这对航天器飞控任务实施具有十分重要的意义[8-10]。
采用STK(Satellite Tool Kit)通用仿真工具进行中继天线跟踪角度实时预算仿真分析[11-15],无法直接与航天器AIT(Assembly, Integration and Test)测试过程相结合,测试数据与通用软件接口格式不匹配[16],依赖人工分析,效率较低。此外,其在航天器研制过程采用抽样验证,在全过程控制、实时性、各阶段一致性等方面存在不足。为提高对中继天线指向角度判读的效率,实现对遥测数据实时比对判读,及时发现测试中存在的问题,提高产品质量并保证产品测试及验证的全面性、有效性和规范性,亟需解决中继天线跟踪角度实时预算及验证这一难题。
本文提出了一种中继天线跟踪角度实时预算方法并进行了软件实现。该方法利用航天器轨道、天线波束及坐标系关系建立中继天线指向角度等效模型;结合航天器飞行姿态和实时遥测,优化天线指向角度预算和验证的流程,自主开发中继天线指向角度预算和验证软件。软件根据中继天线指向角度预算及验证软件计算出的理论指向角度,实时接收综合测试地面服务器播出的中继天线指向角度遥测数据,并进行实时比对判读,实现了中继天线的跟踪角度预算和实时测试结果验证,提升了中继终端产品研制过程的质量控制及研制人员的设计能力。本文方法既可用于实时测试过程天线角度跟踪结果比对,也可用于进行各种姿态下的测控TTC(Tracking, Telemetry and Commanding)覆盖区实时预测。
1 中继天线跟踪角度实时预算方法设计
传统中继天线跟踪角度预算方法根据航天器轨道、中继卫星轨道、中继天线视场计算中继天线指向,进而获取测控覆盖区。在航天器测试过程中,通过将预算所得的中继天线指向与实际测试的指向结果进行抽样比对,定性判断中继天线指向数据的趋势和正确性。然而,传统方法未能实现实时、连续地将预算结果与实际指向进行比对验证,也未能引入实时测试过程航天器的姿态变化,无法对实际指向进行修正,难以适应航天器各种姿态变化下的指向角度预算,降低了有效测控覆盖区利用率。
1.1 指向角度计算要素
中继天线的跟踪角度预算是根据航天器姿态、轨道、位置等信息计算出与中继卫星建立通信所需的中继天线指向角度。比对验证是将预算值与测试中的中继指向角度实时遥测值进行比较,得出当前中继系统实际指向角度偏差,确认系统跟踪精度是否满足要求。然后,根据计算得出的指向角度偏差,通过在轨注入数据包方式对中继终端伺服机构双轴指向跟踪参数进行调整,从而提高在轨中继天线的跟踪精度。
指向角度的计算要素包括姿态坐标系、轨道坐标系、航天器本体坐标系相互关系,如图1所示。

图1 中继天线指向角度计算要素
指向角度主要取决于天线相对中继卫星的位置和中继天线指向系统的基准位置。由于中继天线安装在航天器上,可以用轨道参数描述中继天线相对中继卫星的位置,即航天器相对于中继卫星的位置。中继天线指向系统的基准位置取决于天线在航天器上的安装位置和航天器的飞行姿态。因此,计算中继天线指向角度必须具备的要素主要包括3个方面:航天器和中继卫星的轨道、航天器姿态及天线参考坐标系。
1.2 实时预算计算步骤
为解决传统方法在实时性、姿态适应性等方面存在不足的问题,结合航天器姿态和实时遥测数据,本文设计了一种中继天线伺服跟踪角度实时预算方法,以便实现预算、验证和闭环控制。本文方法与传统方法的比对如图2所示。算法主要实现过程如下:

图2 传统方法与本文方法流程比对
步骤1利用航天器及中继卫星轨道、航天器中继天线波束及坐标系转换关系建立中继天线指向角度等效模型;
步骤2根据航天器姿态、轨道、位置等信息计算出与中继卫星建立通信所需的中继天线指向角度,实现中继天线的跟踪角度预算。同时计算航天器天基链路余量、多普勒频偏、多普勒频偏变化率等链路关键指标,对航天器天基测控的覆盖区域进行预报。然后计算航天器天基链路测控天线与太阳的夹角,对航天器天基链路可能受日凌影响的时段进行预报;
步骤3将中继天线的跟踪角度预算值与综合测试数据下传的中继指向角度实时遥测值进行比对验证,得出当前中继系统实际指向角度偏差;
步骤4根据计算得出的指向角度偏差,通过在轨注入数据包对中继终端伺服机构双轴指向跟踪参数进行调整,提高在轨中继天线的跟踪精度。
2 软件实现
2.1 角度预算软件设计
中继天线跟踪角度预算及验证软件的体现架构如图3所示。软件由软件界面、MFC(Microsoft Foundation Classes)程序架构、窗体控件对象、主计算模块对象、数据接口对象和STK接口模块对象(STK-X)组成。软件基于MFC应用程序框架设计,采用基于对话框的MFC应用程序类。首先,创建MFC应用程序对象和窗体对象。然后,在窗体对象中继创建软件界面的窗体控件、主计算模块对象和数据接口对象,并将STK软件的接口控制STK-X嵌入到窗体对象中,实现与STK软件库的数据通信。
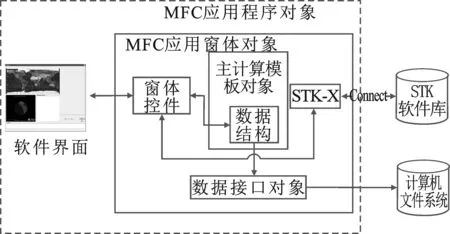
图3 跟踪算法软件架构
软件系统的功能模块划分遵循了模块化、功能化、方便调试等原则。软件的主要功能模块包括用户界面、主计算模块和接口模块3部分。每一部分又可进一步划分为不同功能接口及功能模块,如图4所示。
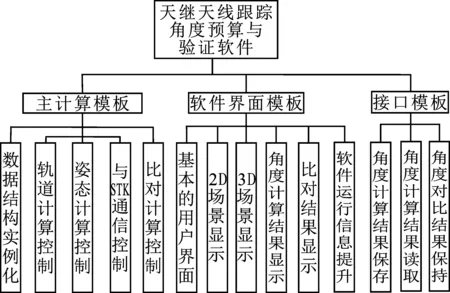
图4 跟踪算法软件模块
2.2 实时比对软件设计
软件基于中继天线指向角度预算与比对软件进行扩展。扩展部分由比对判读模块、天线角度输入模块、遥测处理模块、网络通信模块组成。首先,分别创建中继天线指向角度预算与比对软件程序的对象和窗体对象;然后,由中继天线指向角度预算软件的主计算模块控制进行天线指向角度计算;接下来,中继天线指向角预算软件将计算结果发送至角度实时比对判读软件。在比对判断模块的控制下,将通过网络通信模块接收的综合测试实时遥测数据与理论计算数据进行比对,实现中继天线指向角度实时比对功能。

图5 实时跟踪算法软件架构
实时比对软件主要划分为以下4个模块:比对判读模块、天线角度输入模块、遥测处理模块、网络通信模块。每一部分又可进一步划分为不同功能接口及功能模块,如图6所示。
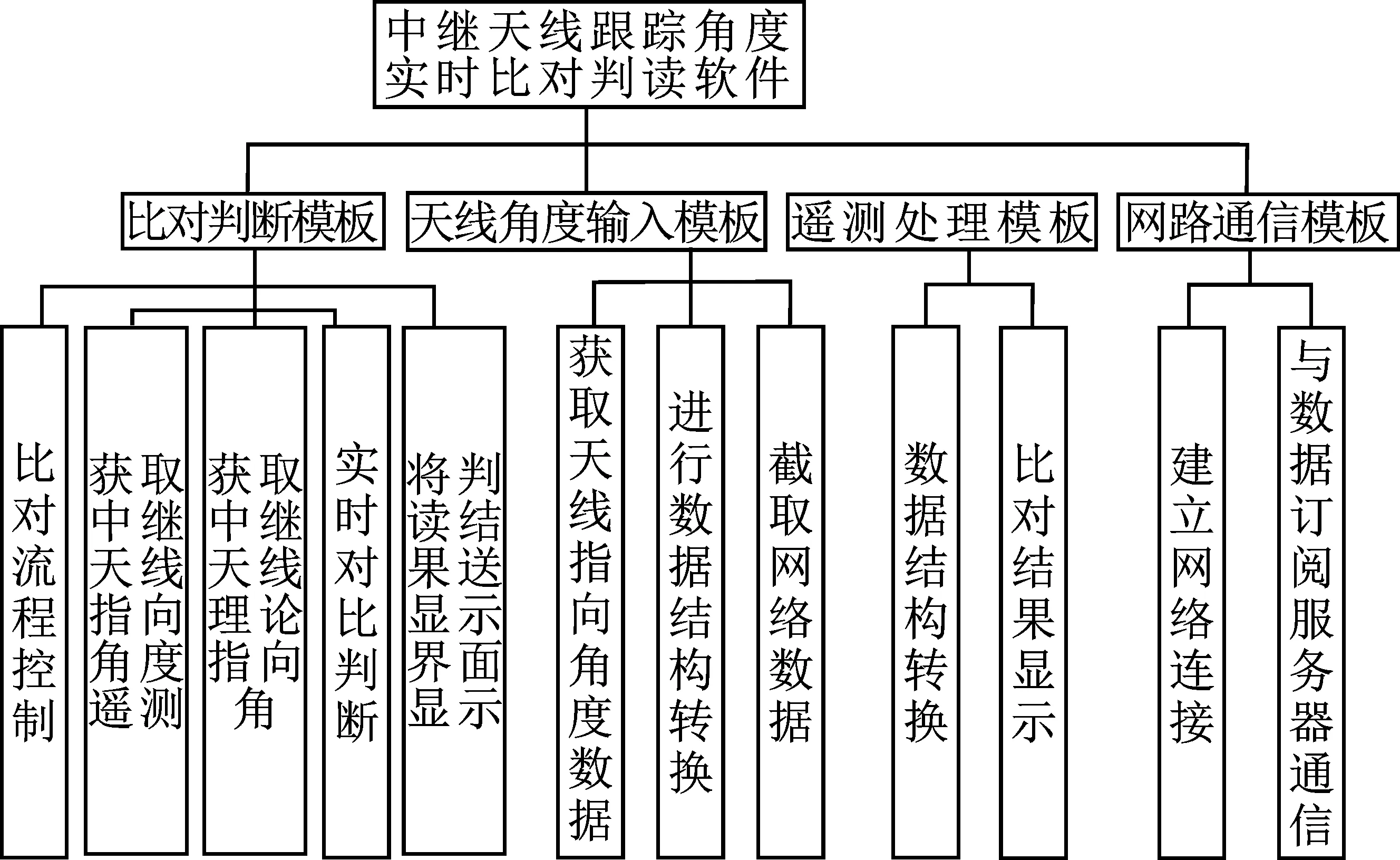
图6 实时跟踪算法比对模块
2.3 主要功能与实现
通过设计开发,软件实现了本文所提算法并具有以下应用功能:(1)接收用户在界面上点击的按钮或菜单指令消息,启动实时比对判读流程,并开辟数据结构的存储空间;(2)读取用户在界面上给出的比对精度的设置参数,启动相应的比对精度;(3)与中继天线指向角度预算及验证软件进行通信,启动中继天线指向角度的计算;(4)通过传递地址的方式,调用天线指向角度输入模块的函数,获取中继天线指向角度的理论计算结果;(5)通过传递地址的方式,调用遥测处理模块的函数,获取中继天线指向角度遥测值;(6)进行中继天线指向角度理论计算结果与遥测值的实时自动比对判读;(7)将比对结果实时发送显示界面进行显示。
3 应用案例及结果分析
3.1 实施流程
用户启动该流程后,程序根据遥测处理模块是否获取到的遥测数据启动比对判读流程。当获取到遥测数据后,程序采用地址传递的方式调用天线角度输入模块。天线角度输入模块按照遥测数据的时间查找理论计算角度,若没有查找到理论角度,则重新进行理论角度计算,将需要参与比对的理论数据存储到比对判断模块输入的地址空间中。比对判断模块根据获取到的数据将理论角度与遥测角度进行比对,并将比对的结果与用户制定的精度要求进行对比。若精度满足要求则输出比对正确的信息;否则输出比对错误的信息,并将信息归档。
比对判读模块通过控制比对流程实现对计算流程和比对流程的控制,同时实现与中继天线指向角度预算及验证软件主计算模块之间的数据交换。流程图如图7所示。
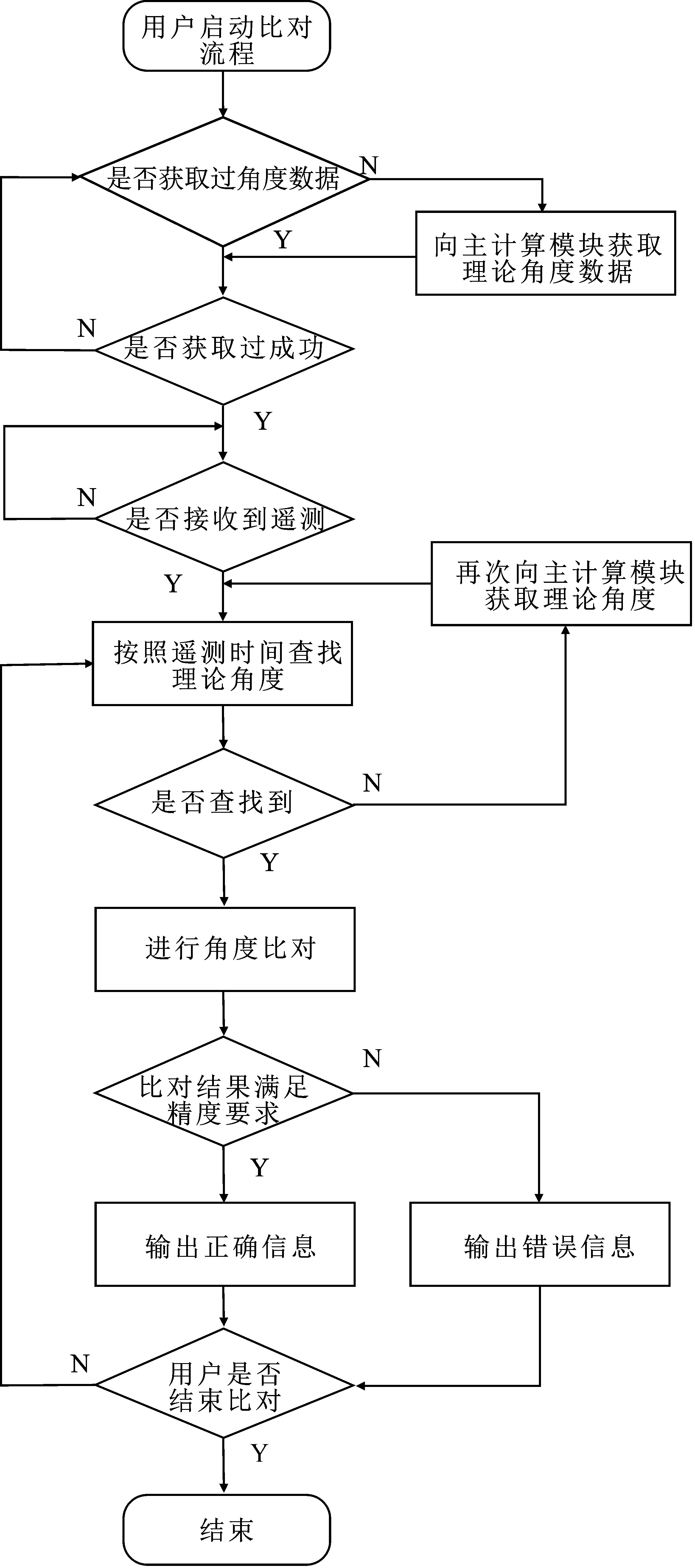
图7 比对程序流程图
3.2 实施结果
中继天线跟踪角度预算及验证软件的软件界面模块实现与用户之间的信息交换。界面设计如图8所示。
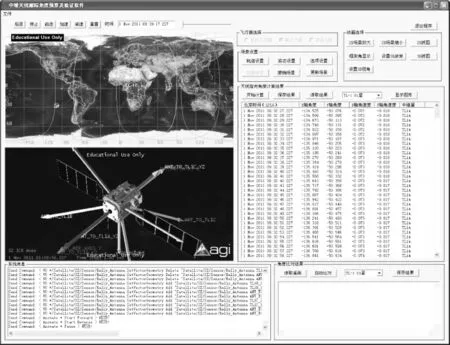
图8 中继天线实时跟踪算法比对验证软件
软件界面是用户与软件交换信息的界面,实现对计算的参数设置和选项设置,对软件仿真动画控制等功能,主要包括:
(1)飞行器选择。用户可以通过选项框选择“目标飞行器”、“载人飞船”和“货运飞船”的中继天线角度计算;
(2)输入轨道数据。单击“轨道设置”按钮,将出现轨道设置对话框,通过对话框进行飞船和中继星的轨道设置,并支持文件读取;

图9 轨道数据输入对话框设计
(3)输入姿态数据。单击“姿态设置”按钮,将弹出姿态设置对话框,通过对话框设置飞行器姿态数据,并支持文件读取;
(4)场景控制。通过场景控制的一系列按钮,可以实现仿真时间设置、动画开始、结束、加速、场景放大或缩小、天线角度矢量显示、天线波束显示和场景图像截屏等功能;
(5)角度计算控制。通过 “计算角度”按钮,建立仿真场景模型并计算天线角度;
(6)角度比对控制。通过“读取遥测”、“自动比对”等按钮,自动比对功能的控制;

图10 姿态数据输入对话框设计
(7)角度计算结果保存。通过“保存结果”按钮,将计算出的天线指向角度进行保存;
(8)角度计算结果读取。通过“读取结果”按钮,将保存的天线指向角度进行回读;
(9)比较结果保存。通过比对结果分组框中的“保存结果”按钮,将比对的天线角度结果进行保存。
3.3 实验效果分析
在某型号航天器AIT分系统测试中,应用了本文设计方法和应用软件。表1给出了传统方法与本文方法实施效果比对分析。由表2可以看出,由于本文方法引入了航天器实时遥测数据,实现了实施比对验证。应用中,利用比对结果进行了注入数据包闭环反馈。同时,本方法进行了软件实现,实现了自动、可视化的验证方式。

表1 分系统AIT测试定性比对
在某型号在轨飞行试验中,应用了本文设计方法和应用软件。表2给出了相对传统方法,本文方法实施的效果比对分析。由表2可以看出,由于本文方法引入了航天器实时姿态,因此在测控覆盖区预算上更加精确,提高了测控可视弧段利用率。在组合体存在遮挡的工况下,单颗中继卫星最大可提高6 min覆盖率,单个测控弧段可提高12 min。每个低轨测控弧段按90 min测算,单个测控弧段最大可提高13.4%测控覆盖率。

表2 在轨飞行量化比对
4 结束语
针对传统中继天线跟踪角度STK仿真算法无法与航天器AIT实时测试过程相结合的问题,本文提出了一种中继天线跟踪角度实时预算方法并进行了软件实现。该方法利用航天器轨道、天线波束及坐标系关系建立了中继天线指向角度等效模型,并结合航天器飞行姿态和实时遥测,实现了中继天线的跟踪角度预算、实时验证和闭环控制。软件通过界面实现了与操作者的人机交互,并通过STK软件库实现天线跟踪理论角度的实时获取。基于该方法实现的软件已应用于某重点型号航天器分系统测试,取得了良好的效果。基于实时姿态的伺服跟踪天线角度预算方法,有效解决了航天器在正飞、倒飞、连续偏航、组合体太阳帆板遮挡等状态下的测控覆盖实时预算难题,实现了天基测控通信覆盖区的实时、准确计算。
本文方法既可用于航天器AIT测试过程与实时遥测进行比对,也可用于具有天基测控区实时预报、链路关键指标实时计算、链路建立评估、中断预警等功能需求的航天器天基测控链路仿真及验证。
猜你喜欢
无线电通信技术(2019年1期)2019-12-24
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
数据采集与处理(2018年6期)2018-12-19
测控技术(2018年2期)2018-12-09
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
现代工业经济和信息化(2016年6期)2016-05-17
航天器工程(2015年3期)2015-10-28