面向交叉口主动安全的车路协同辅助决策系统设计
2021-06-16 09:40:18曲大义韩乐潍黑凯先赵梓旭
公路交通科技 2021年5期
曲大义,韩乐潍,林 璐,黑凯先,赵梓旭
(青岛理工大学 机械与汽车工程学院,山东 青岛 266520)
0 引言
交叉口是道路网的交汇点,交叉口信号灯变换时,驾驶员根据实时路况信息迅速判断停车或通过,由于驾驶员对交叉口信息的把握不完全准确,极易做出错误判断,轻则延误通行时间,重则导致交通事故。据相关资料[1]统计,交叉口事故90%是发生在信号过渡期间,其主要原因包括:驾驶员信息判断能力不足、视线不良、天气原因以及畸形交叉口视距不足等。总体而言,因驾驶员对交叉口信息把握不准确,而导致事故发生的概率占90%以上。同时,交叉口保守型驾驶行为增加车辆通行延误时间高达全程的30%。
从20世纪60年代Gazis等人提出两难区概念和GHM模型,国内外学者对解决两难区问题进行了深入探究。Olson、Lin[2]等许多学者通过更改信号灯时长来对车辆驾驶员和两难区进行研究。张亚平[3]等考虑第一类两难区对黄灯信号时长进行了优化,提出对限速值为60 km/h的信号交叉口,分别设置5 s和4 s的黄灯信号时长,可有效消除第一类两难区。杨东[4]考虑了两难区的动态变化性,并设计了基于提前引导的两难区规避系统。张存保[5]等人运用车速引导、绿灯时间延长和黄灯时间调整等 3 种措施降低车辆进入两难区的概率,并使用Vissim进行了仿真。刘诗福[6]等提出一种基于马尔可夫模型的两难区自适应控制方法,采用自适应控制调整信号相位时长,通过仿真验证其有效性并对参数进行了敏感性分析。赵永红[7]等分析了两难区的时变特性并由此提出一种两难区警示系统的改进算法并通过仿真验证。
综上所述,国内外学者较多采用诸如黄灯时间调整等信号控制手段,虽然增加黄灯时间虽然可以避免部分车辆进入两难区, 但是一味增加黄灯时间会造成路段的通行效率下降,甚至增加部分激进型驾驶员闯黄灯的概率。另外,部分学者从车路协同角度入手,利用车辆与路面基础设施之间的信息共享与车辆控制的方法解决两难区问题,但是该方法对技术水平要求较高、软硬件设施投资较大,目前难以推广使用,无法根治亟待解决的交叉口两难区问题。因此为控制交叉口处的车速和辅助驾驶员准确决策,本研究提出并构建一种面向交叉口主动安全的车路协同辅助决策系统设计,协调交叉口的安全性与道路整体通行效率之间的关系。在分析两难区动态特性的基础上,提出两难区主动安全辅助决策模型,并进行了两难区主动安全系统设计,通过安装于停止线处的智能埋地灯为驾驶员提供准确的驾驶建议,减少驾驶员因主观决策失误而造成的交通事故损失,缩短保守型驾驶行为带来的时间延误,同时结合动态黄灯时间,为驾驶员安全通过交叉口提供保障。
1 两难区主动安全辅助决策模型
1.1 交叉口两难区动态特性分析
Urbanik和Koonce将两难区定义为Gazis等人提出的I型两难区和ITE技术委员会报告中确定的II型两难区[8]。I型两难区是指在交叉口信号灯黄灯启亮前的一个阶段进入交叉口进口道的车辆驾驶员会由于自身判断能力不足等因素,导致其处在无法继续行驶通过交叉口和无法减速安全停车等待红灯的两难困境中,造成信控交叉口在信号转换阶段闯红灯现象和交通事故多发。I型两难区如图1所示,其中XC是车辆能够以较为安全的减速度停止在停止线前的距离,称为最小安全停车距离;X0是车辆能够在红灯启亮前越过停止线并驶离交叉口的最大距离,称为最大黄灯通过距离。
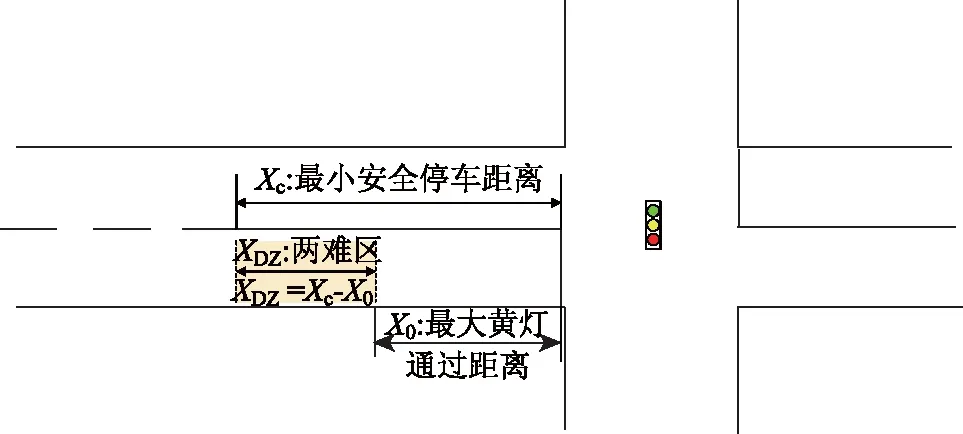
图1 交叉口两难区示意图Fig.1 Schematic diagram of intersection dilemma zone
根据GHM模型,XC与X0的公式如下[9]:
(1)
(2)
式中,v0为驶近车辆的速度;δ1与δ2分别为减速停车与通过时的驾驶员反应时间;a1与a2分别为车辆最大的减速度与加速度;τ为交叉口的黄灯时长;W为交叉口宽度;L为车辆自身长度。
若XC>X0时,在XC与X0之间的区域即为两难区,记为XDZ。当黄灯启亮时,处于XDZ区域内的车辆既无法安全通过也无法减速停车在停止线前。
在工程实践中,I型两难区的参数经常采用确定的数值,例如v0一般采用道路限速值,δ1,δ2,a1,a2等也一般根据ITE交通工程手册等采用相应的数值。但是这些参数会随着不同的车辆速度与加速度数值、驾驶员心理属性、道路条件等因素变化,因此需要对进口道驶入车辆进行信息采集,逐一分析每一辆车的属性才能准确判断两难区边界。
驾驶员在驶入交叉口进口道时,需要根据车辆信息、信号灯时长、前车时距、道路条件等多种因素做出通过或停车的判断。在短时间内驾驶员难以把握如此多的信息,容易做出错误的决策。驾驶员在两难困境内决策失误的主要类型有如下几种[7]:情形1,车辆以当前时速行驶无法通过停止线,但驾驶员选择加速行驶,导致闯红灯;情形2,驾驶员反应时间较长,车辆减速度较大,不利于交通安全;情形3,驾驶员本可以通过停止线,但错误地选择减速停车,导致通行效率下降;情形4,驾驶员操纵车辆减速度过小,造成越过停止线停车或闯红灯。图2中,横轴为信号相位时间,纵轴为车辆到停止线的距离。
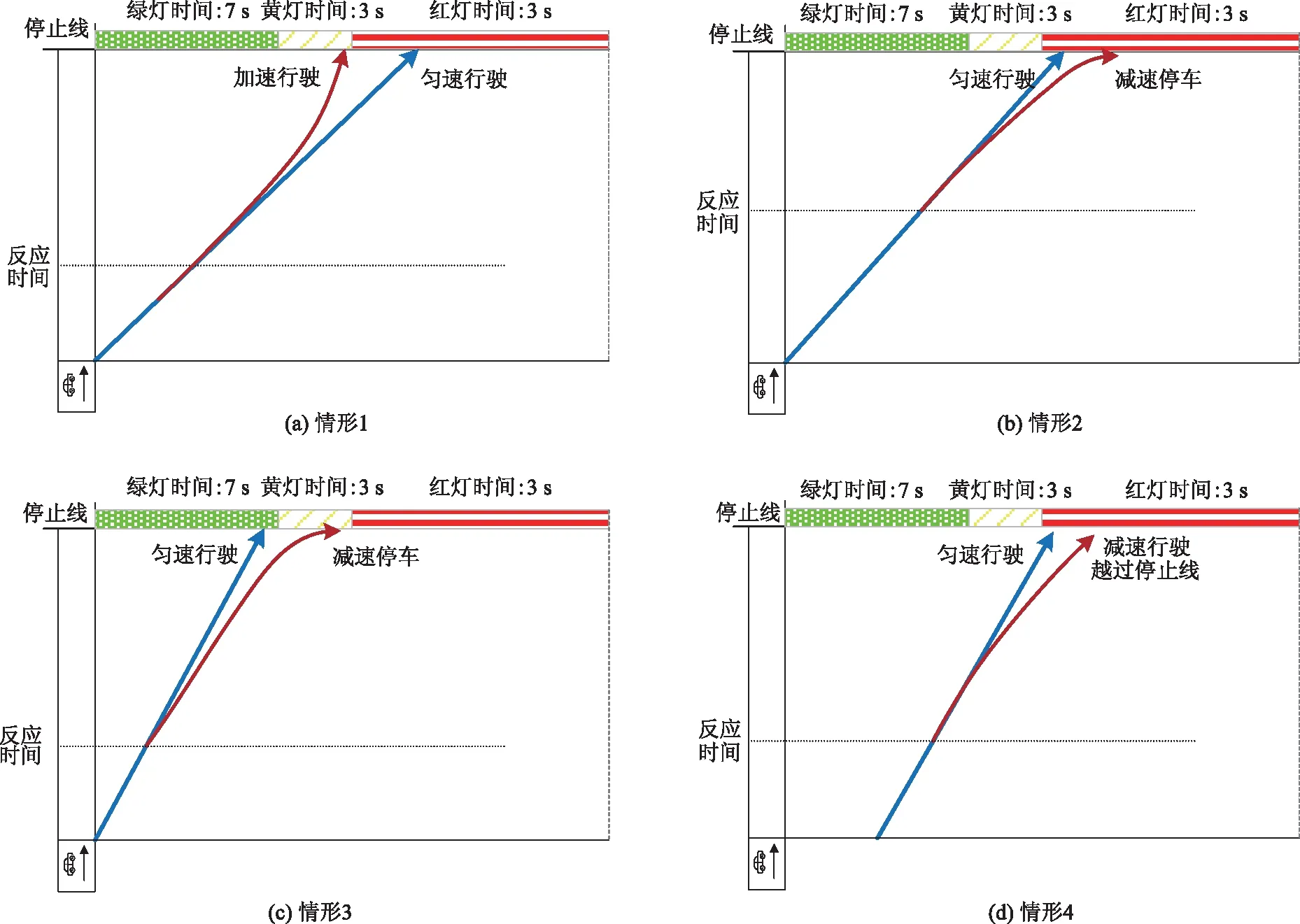
图2 驾驶员决策失误类型示意图Fig.2 Schematic diagram of types of driver’s decision-making errors
因此合理准确地把握两难区边界,并对驾驶员进行相应的提醒,可有效避免车辆陷入两难区, 规避交叉口事故发生的风险,缩短保守型驾驶行为带来的时间延误,整体提高路网的鲁棒性。
1.2 交叉口两难区定点边界模型
由于两难区的边界由较多参数确定且不断变化,因此确定车辆是否处在两难区时,可以通过车辆在进口道上几个确定位置处的速度、加速度和信号时间等信息来进行判断。
通过建立运动学模型描述上述问题,当车辆以速度vL和加速度aL行驶到距停止线距离S1处,此时距离红灯启亮时间还有trL,如果车辆能够在红灯启亮前通过停止线,应满足如下方程[10]:
(3)
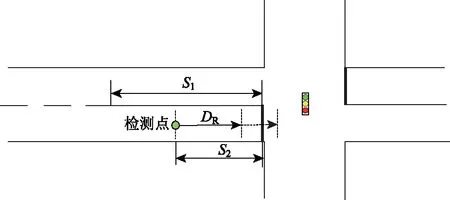
由此定义两难区后缘边界位置为DL,即车辆在红灯启亮前能够从距停止线S1处驶过的最大距离,示意图如图3所示。
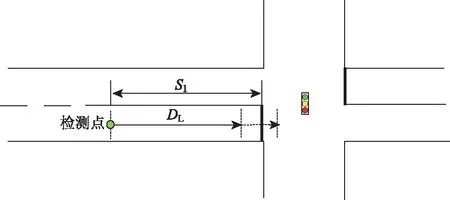
图3 DL示意图Fig.3 Schematic diagram of DL
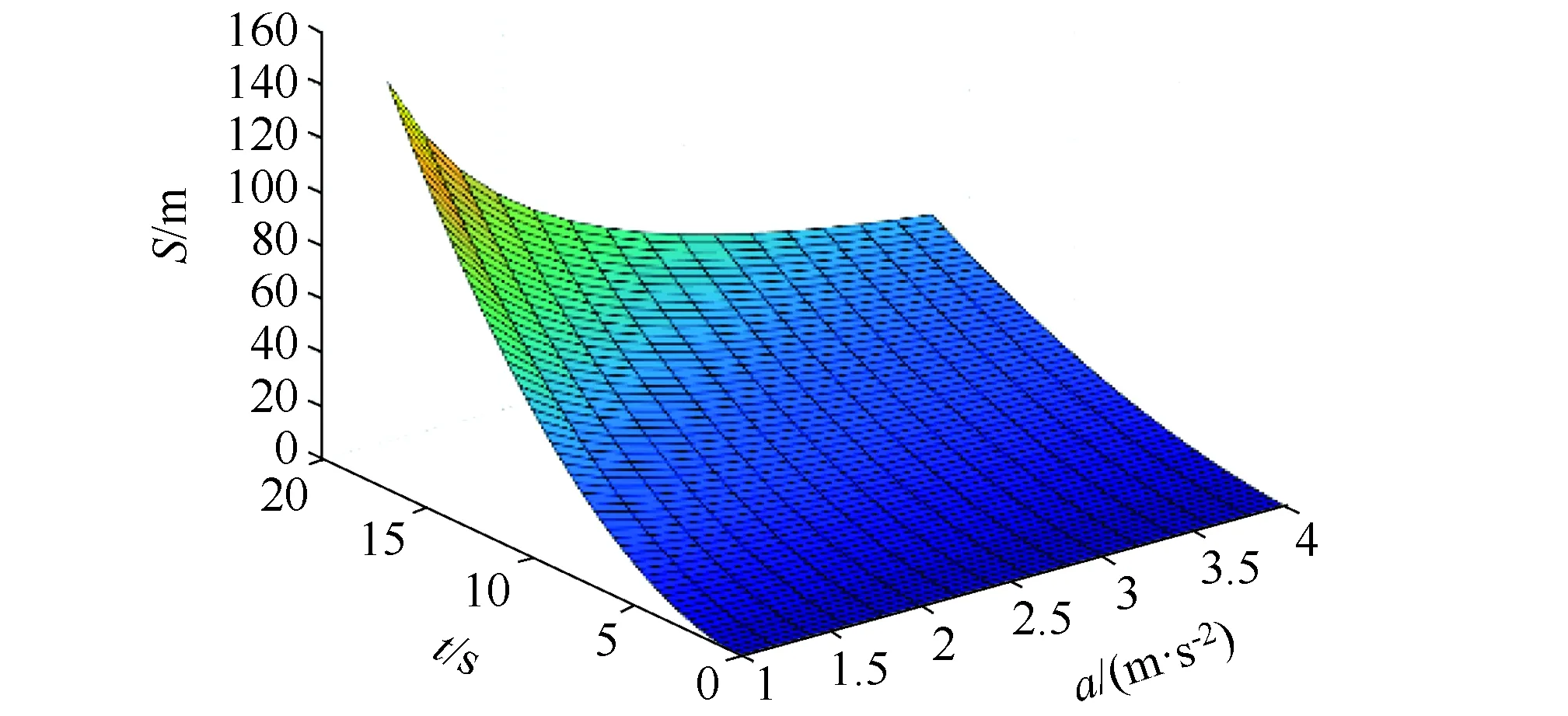
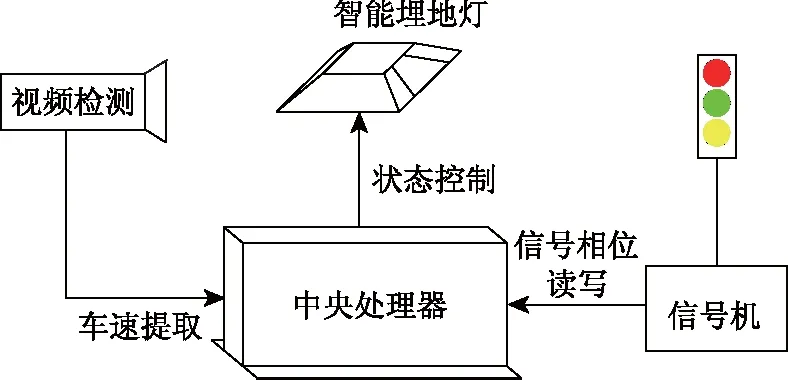
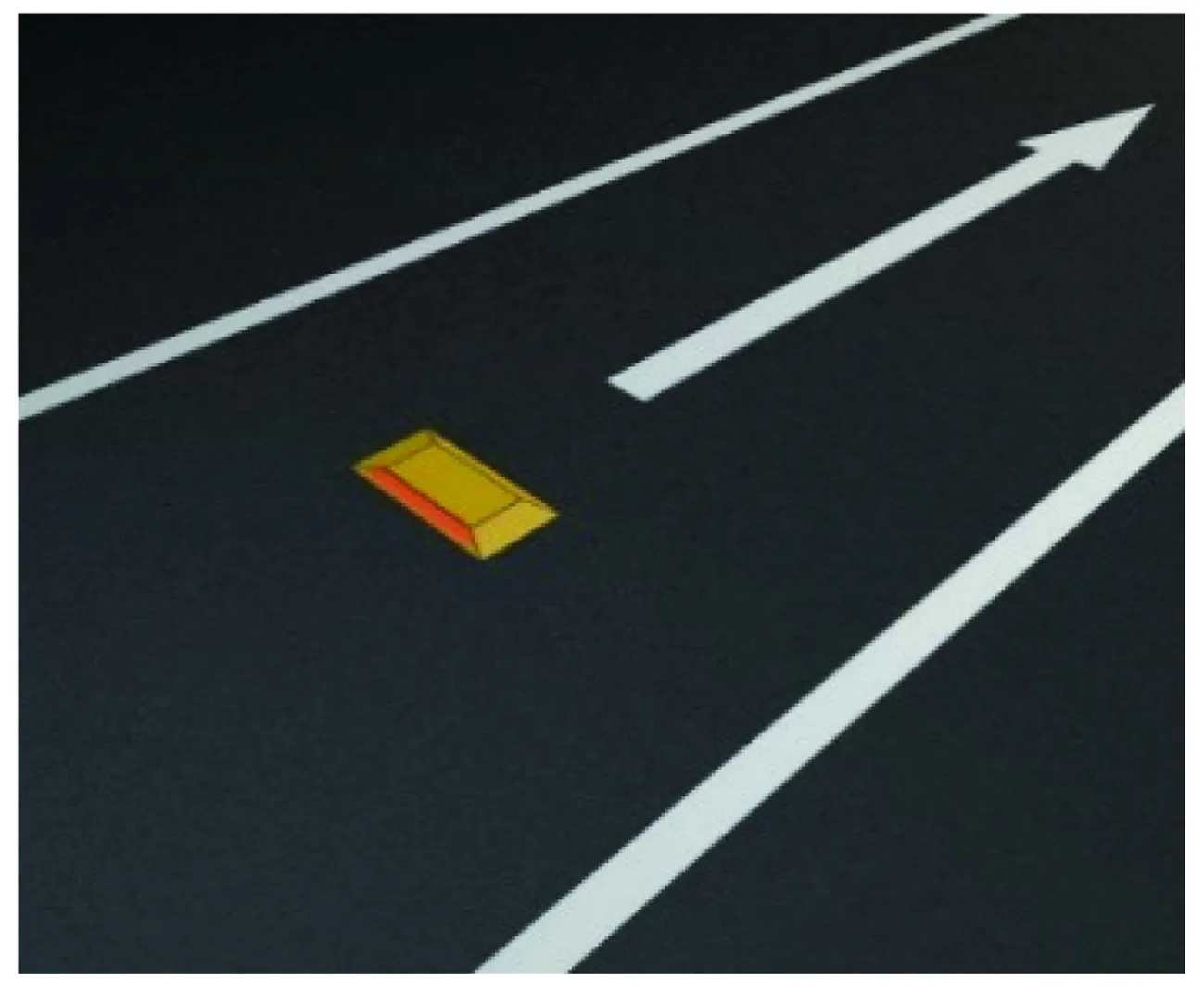
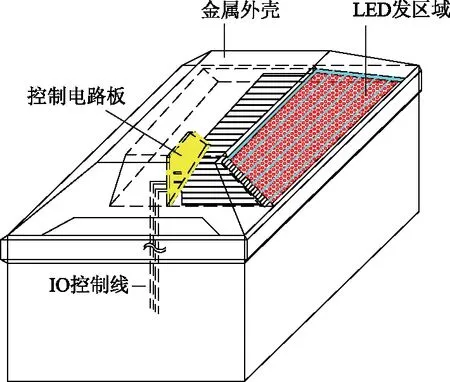
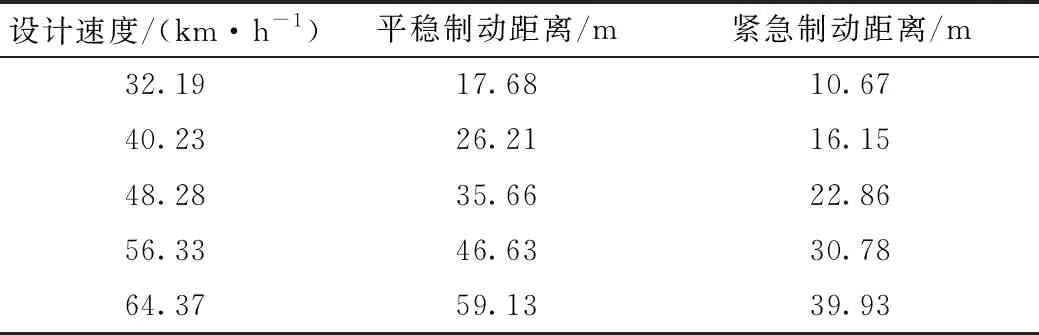
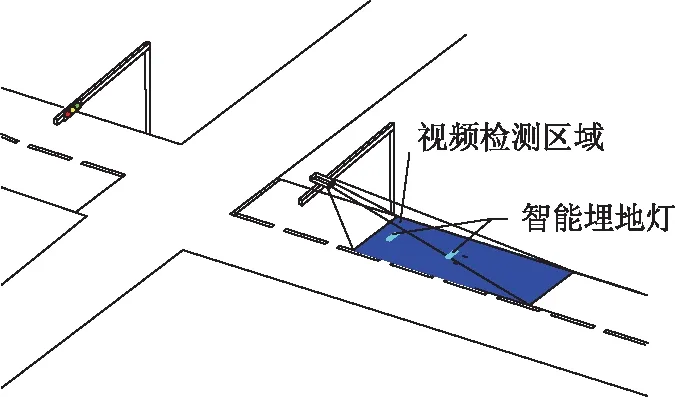
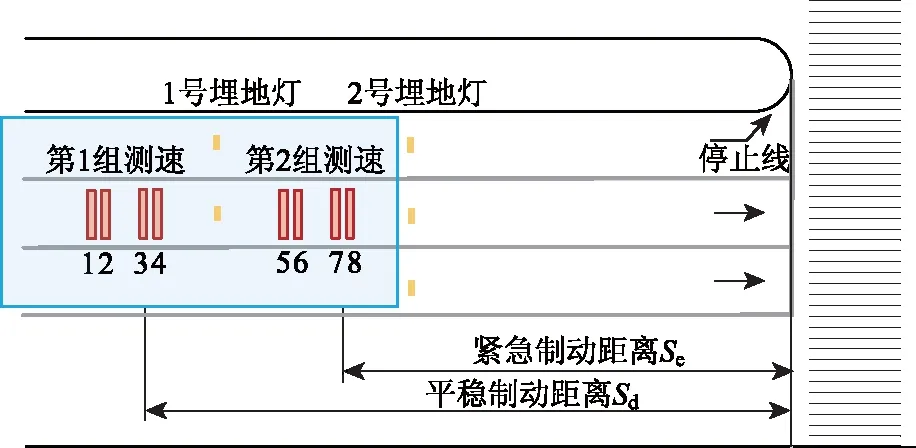
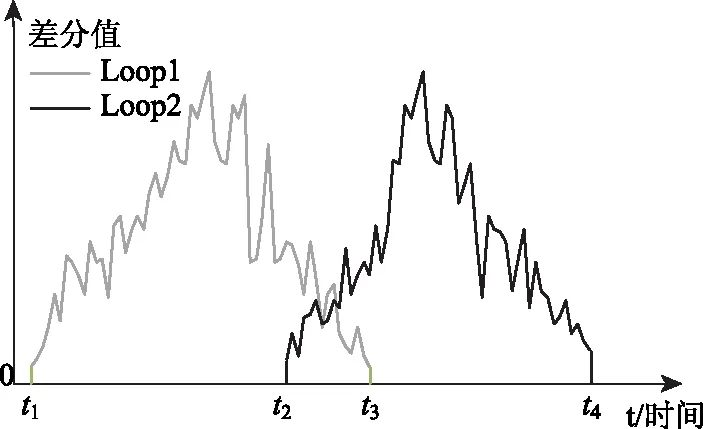
两难区后缘边界位置可以确定车辆以当前状态能否通过交叉口。当S1 图4 DL函数三维图Fig.4 Three-dimensional diagram of DL function 如果车辆以速度和加速度行驶到距停止线S2处,此时距离红灯启亮时间还有trR,车辆减速响应时间为ts,如果车辆能够在红灯启亮前减速停在停止线前,应满足[11]: (4) 式中λ1为车型修正系数;λ2为路面摩擦力修正系数。由此定义两难区前缘边界位置为DR,即车辆经过提醒后采取措施,在红灯启亮前能够从距停止线S2处减速到停车所需的最小距离,如图5所示。 图5 DR示意图Fig.5 Schematic diagram of DR 两难区后缘边界位置可以确定车辆以当前状态能否减速停止在停止线前。当S2≥DR时,车辆能够在停止线前减速停车;当S2 图6 DR函数三维图Fig.6 Three-dimensional diagram of DR function 根据上述两难区动态特性研究与交叉口两难区定点边界模型,提出如下辅助决策模型。在距离停止线S1与S2处设置车辆信息采集装置,通过智能埋地灯的提示作用和设置动态黄灯时间,防止车辆进入两难区,辅助决策流程图如图7所示。 图7 辅助决策模型流程图Fig.7 Flowchart of auxiliary decision-making model 当车辆经过第1组测速点时,可以计算出两难区后缘边界位置DL,此时车辆正处于设定的距离停止线S1处,将DL与S1进行比较,根据结果控制一号埋地灯的状态,辅助驾驶员判断能否通过停止线。当车辆经过第2组测速点时,可以计算出两难区前缘边界位置DR,此时车辆正处于设定的距离停止线S2处,将DR与S2进行比较,根据结果控制二号埋地灯的状态,提醒驾驶员当前状态能否停止在停止线前。当S2 ITE报告中的减速度建议值为3.048 m/s2,美国国家公路与交通委员会建议使用的最大减速度为3.414 m/s2[13],因此设置3.414 m/s2为模型的最大减速度参考值amax。 将式(4)进行变形,可以得到临界减速度aRC的计算公式[14]: (5) 当amax>aRC≥aR时,车辆应该加大制动力停车;当aRC 动态黄灯时间的初始时长为3 s,在考虑交通效率与驾驶员心理等因素,设置最大黄灯延长时间Δt为2 s[15]。动态黄灯时间的计算公式如下: Δt∈[0,1,2]。 (6) 交叉口主动安全辅助系统设计主要分为信息采集、决策控制、智能埋地灯3个模块,系统整体架构如图8所示。信息采集模块采用视频测速及时获取驶近车辆速度及加减速信息;决策控制模块实时读写交通信号控制机中的信号相位时间、驶近车辆的速度和加速度信息,通过辅助决策模型对当前驾驶行为的安全性进行判断,根据辅助决策模型对智能埋地灯和动态黄灯时间做出相应控制;智能埋地灯模块根据判断结果在熄灭、启亮红色、启亮红色闪烁3种状态下灵活切换,从视觉上为驾驶员提供决策辅助。 图8 交叉口主动安全辅助系统整体架构Fig.8 Overall system architecture of active safety auxiliary system for intersection 控制单元由中央处理器、信号相位读写、视频车速检测、智能埋地灯控制4部分构成(见图9)。中央处理器以单片机为核心控制单元,信号控制线并连于控制机I/O端口,实时读取交叉口信号相位状态。视频车速检测系统主要由视频摄像头、传输馈线、检测处理单元3部分构成,检测处理单元固化于中央处理器中。中央处理器利用所获信息,根据交叉口主动安全辅助决策模型判断行车安全度及行车意向,智能埋地灯控制部分根据中央处理器指令控制埋地灯的状态切换。 图9 决策控制单元示意图Fig.9 Schematic diagram of decision-making control unit 智能埋地灯通过预制混凝土套筒底座嵌装于路面上,每车道放置两盏,底部通过传输馈线与控制单元连接。埋地灯为单向发光,不影响其他方向车辆行驶,顶部高于地面3 cm,其防水等级在IP67以上,顶部外壳使用高强度钢材制造,LED发光区域外侧安装有高强度钢化玻璃透明保护板,钢化玻璃透明保护板内嵌装竖直光栅,降低灯光在车道两侧的可视角度,减少对非机动车和行人的干扰;外壳边缘采用圆角设计减少对车辆轮胎的冲击(如图10、图11所示)。 图10 智能埋地灯安装Fig.10 Installing intelligent underground light 图11 智能埋地灯结构图Fig.11 Structure diagram of intelligent underground light 针对前面所述距停止线S1与S2处进行车辆信息检测,为满足系统功能需求,制定平稳制动距离Sd、紧急制动距离Se两项指标确定信息检测与两组埋地灯的位置(见图12)。 图12 埋地灯与信息检测位置定位Fig.12 Positions of underground light and information detection 平稳制动距离Sd:车辆能够以较为安全舒适的减速度减速停车在停止线前的距离。当车辆经过此位置时,系统需要根据预设决策辅助模型判断1号埋地灯是否启亮。平稳制动距离距离须保证车辆以设计速度行驶时,驾驶员看见埋地灯启亮后能及时采取制动措施,在交叉口停止线前平稳且安全的停车。因此,本研究采用国际通用制动距离(英制单位)作为模型决策距离[16]: (7) 式中,Se为决策距离;vi为设计速度;vf为制动终速度,取值为0;t为反应时间与制动协调时间,此处取值为0.7 s;G为路面坡度。针对不同的设计车速和交叉口路面坡度,可得出不同的决策距离。 紧急制动距离Se:车辆能够以较大减速度减速停车在停止线前的距离。紧急制动距离需确保汽车经智能埋地灯红色闪烁提醒后,能够最大限度地安全制动。有关世界组织和国家对汽车的制动效能检验要求以及评价参数限值都有具体规定,为满足汽车在正常情况或紧急情况下的制动距离要求,本设计以汽车检验标准中的制动效能要求作为紧急制动距离设计标准。汽车制动效能因刹车装置的性能、轮胎性能、路面摩擦系数、汽车装载状态以及刹车操作的不同而异[17],其主要评价指标包括制动距离、制动减速度、制动协调时间、制动力4项指标。我国《机动车运行安全技术条件》中,汽车在符合制动踏板力或制动气压下的条件下,仅需满足制动距离或制动减速度其中一项即为合格,且我国标准中主要以车辆总质量这一参数来规定各指标限值,在参数范围上不能满足紧急制动距离制定的灵活性及精准性,故此,采用美国FMVSS135制动距离标准限值,综合考虑系统设置交叉口处的道路设计速度、行经车辆的车型比例、路面状况等因素,针对性地制定紧急制动距离[18]。 表1为不同设计速度的城市道路定位指标参考,其中路面坡度取值为0,城市道路Se选用乘用车满载时的制动距离标准。 表 1 定位指标参考 由于驾驶员需要在智能埋地灯进行视觉提醒后做出操作,因此需留出相应的埋地灯可视距离,可根据道路实际情况,从两处制动距离起始位置处前移5~10 m。 信息采集模块采用视频图像检测的方法对交叉口驶进车辆的速度信息进行采集和处理。采用目前应用最广泛、最成熟的差分图像分析方法,在交叉口进口道的视频图像上划定“虚拟检测线圈”,实现类似交叉口地磁线圈的功能,从而获取车辆的速度与加速度[19]。信息采集模块示意图如图13所示。 图13 信息采集模块示意图Fig.13 Schematic diagram of information acquisition module 在进口道视频检测区域前端划定两个虚线检测线圈Loop1与Loop2(如图14所示),通过差分图像分析可近似获得通过该路段中点时的速度v1。同理,在视频检测区域后端再划定Loop3与Loop4,可得到v2。 图14 视频图像区域划定平面图Fig.14 Plane view of delimiting video image area 图15 视频图像区域划定示意图Fig.15 Schematic diagram of delimiting video image area 为避免汽车变道造成系统决策失误,可适当延长交叉口展宽长度至测速区范围之外。 视频检测模块使用“图像 RGB 统计值的差分值”这一图像特征来产生视频虚拟线圈的输出信号。图像 RGB 统计值的差分值的输出信号由式(2)可得[20]。 (8) 通过对相邻两帧图像的RGB统计值作差分并输出信号可以看出,在虚拟线圈内提取图像特征可以有效的检测车辆的出现并监视车辆经过虚拟线圈的整个过程[21],如图16所示。 图16 图像差分值信号输出图Fig.16 Curves of image differential value signal output 图中,t1、t2分别为车辆到达Loop1和Loop2视频虚拟线圈的时刻;t3、t4分别为车辆驶离Loop1和Loop2视频虚拟线圈的时刻,若用D1表示两个线圈的相隔距离,则车辆通过前两组线圈测得速度v1为: (9) Loop3,Loop4视频虚拟线圈结合Loop1,Loop2所得数据,若用D2表示第2组视频虚拟线圈的相隔距离,则该车的加速度a1计算如下: (10) 车辆驶离Loop4的时刻为系统控制一号埋地灯启动的决策点,该时刻的速度与加速度近似等于v2和a1。第2组虚拟测速线圈与第1组设置方式相同,同理可以得到车辆驶离Loop8时刻的近似速度与加速度v4和a2。 驾驶模拟试验可以有效地探究人-车-路面基础设施之间的相互影响。为了验证本设计的有效性,通过模拟驾驶的方式进行试验。 选取青岛市东海路连续的3个交叉口路段为试验道路搭建模拟驾驶环境,道路限速值为60 km/h,根据各交叉口实际情况设置平稳制动距离Sd、紧急制动距离Se和埋地灯安装位置。试验招募20名持有机动车驾驶证且驾驶车龄在1年以上的志愿者,分别在安装辅助决策系统和未安装辅助决策系统的试验环境下进行多次模拟驾驶。未安装辅助决策系统的试验环境中绿末切换模式为黄灯3 s。 对试验数据进行筛选,选取红灯启亮前10 s内驶过平稳制动距离Sd的车辆进行研究,其中安装辅助决策系统环境下符合条件的车辆数为189次,未安装辅助决策系统环境下符合条件的车辆数为177次。 从图17中可以看出:在模拟驾驶试验中,安装决策辅助系统环境下的车辆经提示后选择减速停车的比例上升,加速通过的比例下降,经埋地灯提醒后驾驶员选择抢灯的激进型驾驶行为得到一定程度上的纠正;匀速驶过的车辆比例上升,驾驶员在安装决策辅助系统环境下通过交叉口的信心增加;闯红灯车辆的比例大幅下降,由此可知决策辅助系统可有效辅助驾驶员决策,降低闯红灯的概率。 图17 试验结果分析Fig.17 Analysis of experimental result (1)面向交叉口主动安全的车路协同辅助决策系统采用车路协同的原理,结合车辆行驶状况与交叉口信号相位,在分析两难区动态特性的基础上提出了一种两难区定点边界模型,并建立辅助决策模型。 (2)设计交叉口主动安全辅助决策系统,对信号过渡期间的车辆逐一进行安全性判断,利用智能埋地灯以视觉效果对驾驶员进行辅助决策,同时结合动态黄灯时间,有效避免了车辆进入两难区,减少因驾驶员决策失误造成的闯红灯行为,降低交叉口发生事故的风险。 (3)综合考虑交叉口通行效率与安全性之间的关系,在不影响绿灯通行效率的前提下,提高交叉口安全度,规范交叉口驾驶行为,减少交叉口拥堵,提升道路网的服务水平和经济效益,整体提高路网交通稳静性,为交叉口主动安全研究提供新的方法。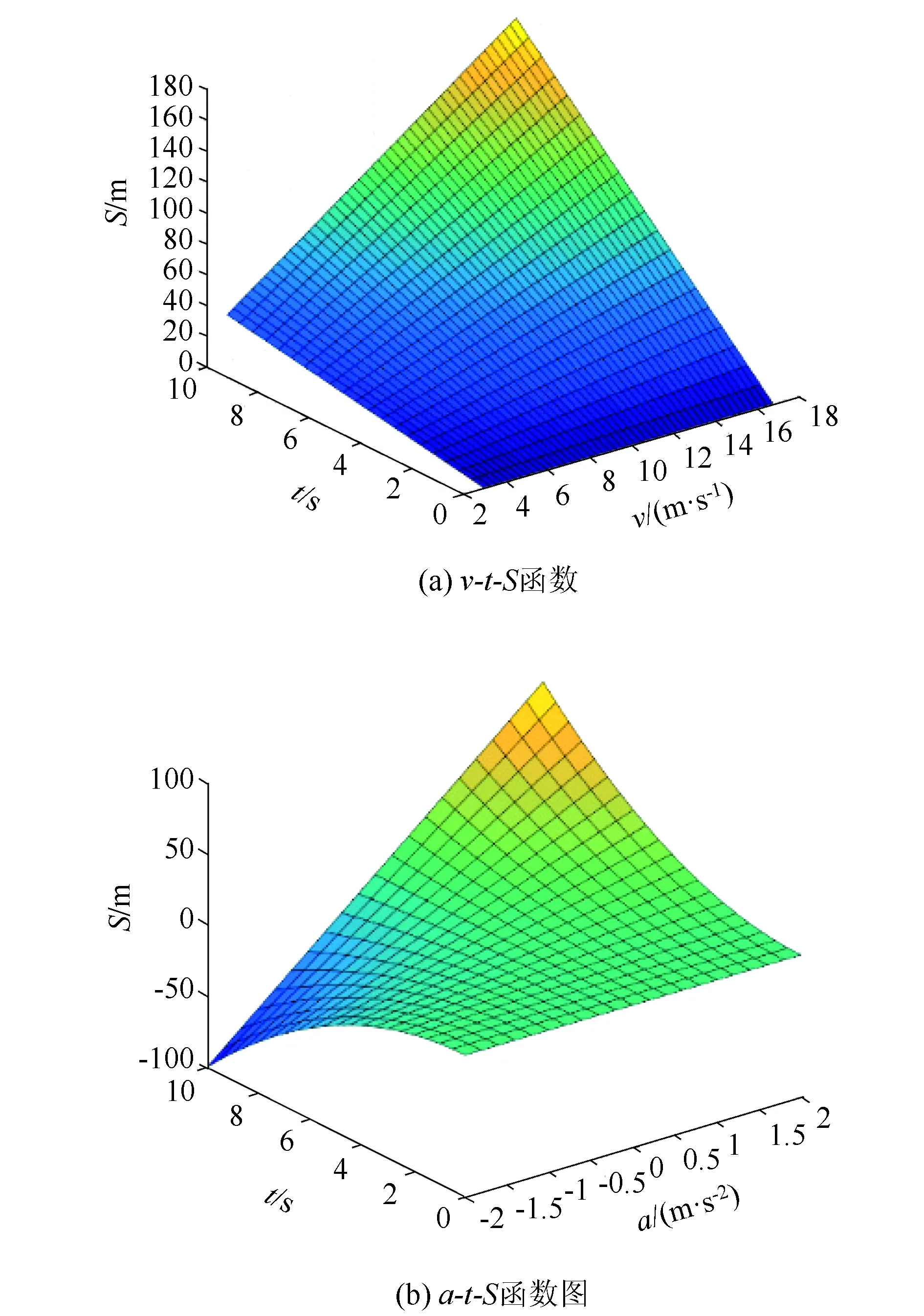
1.3 主动安全辅助决策模型

2 系统方案设计

2.1 决策控制单元设计
2.2 智能埋地灯设计
2.3 埋地灯与信息检测位置定位

2.4 信息采集模块设计


3 模拟驾驶验证
3.1 模拟驾驶环境
3.2 模拟驾驶试验结果分析

4 结论
猜你喜欢
数学小灵通·3-4年级(2021年3期)2021-04-13 01:04:02军事文摘·科学少年(2017年6期)2017-09-04 15:06:36重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:32中国房地产业(2016年2期)2016-03-01 01:25:37燕山大学学报(哲学社会科学版)(2015年3期)2016-01-05 17:28:45伴侣(2015年5期)2015-09-10 07:22:44系统工程学报(2015年3期)2015-02-28 19:54:01河南科技(2014年14期)2014-02-27 14:12:02中国化肥信息(2014年37期)2014-02-27 13:41:23聪明泉·少儿版(2008年4期)2008-05-20 09:24:46