
船载测控系统校相方法的研究
2021-06-11 03:53华林
电子设计工程 2021年11期
华林
(中国西南电子技术研究所,四川成都 610036)
随着我国航天测控任务的发展,测量船的测控任务越来越密集,为了在海上测控任务中能及时捕获并稳定跟踪目标,跟踪任务前必须先校相。近年来随着无塔校相技术的发展,如对星快速校相,射电星校相都得到了快速发展和应用[1],目前船载测控系统以S 频段和X 频段为主,X 频段无可用同步卫星或低轨卫星用于标校,而射电星校相对系统的G/T 值有一定要求[2-3],船载系统(12 m 天线)G/T 值不够,无法使用射电星校相。故这两种方法都不适用于船载测控系统。该文首先介绍了校相的基本原理,然后介绍了测控船常用的偏馈记忆法校相,基于氦气球搭载信标球的粗校加精校方法,以及分析了无人机校相法在海上使用的可行性。
1 校相基本原理
由于跟踪精度要求高,船载测控系统使用的比幅单脉冲双通道跟踪接收[4],由馈源产生的和、差两路信号经低噪声放大器放大,变频器变频到70 MHz后送跟踪接收机,由跟踪接收机解调出方位、俯仰误差电压[5]。其中方位误差电压为:
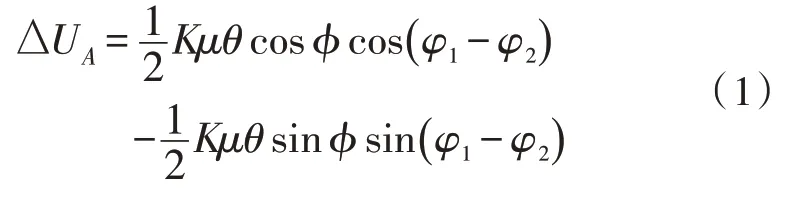
俯仰误差电压为:

式中,K为归一化差斜率,μ为差方向图归一化斜率,φ为天线偏离目标所在平面与地平面角度,θ为天线偏离目标角度,φ1为和路信道引入的相移,φ2为差路信道引入的相移。
式(1)和式(2)中第二项均为交叉耦合项,当φ1-φ2=0°或φ1-φ2=180°时,式(1)和式(2)中第二项(交叉耦合项)变为0,即不存在交叉耦合项。校相的目的就是通过调整和、差信道之间的相位差,使φ1-φ2=0°或φ1-φ2=180°,消除交叉耦合项,得到最大的误差电压[3],工程上一般通过多次调整相位,使交叉耦合小于20%。通过调整和、差两路信道的相对相位差使相位极性和交叉耦合满足要求的过程就是校相。整个校相流程已编入自动控制系统,整个校相流程可在30 s 内完成,称为快速校相[6-7]。
2 船载测控系统校相方法分析
2.1 偏馈记忆法校相
船载测控天线偏馈系统主要由偏馈天线振子、校零变频器、电缆等组成,天线振子安装在天线主反射面上,根据频段要求,一般安装1 个或2 个偏馈阵子,以S 频段为例介绍偏馈标校原理。如图1 所示。
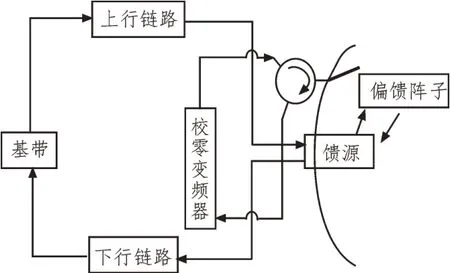
图1 S频段偏馈标校系统组成示意图
相位标校时,由基带产生70 MHz 调制信号,经上行链路变频放大后通过天线馈源发射出去,偏馈振子收到馈源发出的信号后送校零变频器,校零变频器将发射频率转换为接收频率后通过隔离器送回偏馈振子,偏馈振子发出的电磁波信号经馈源接收后通过馈源网络进入下行链路,最终回到基带产生跟踪角误差信号。由于偏馈振子和馈源的位置是固定不动的,不用担心船摇影响,整个上、下行链路也是相同的,所以不论信号是远场信号还是近场信号,其由天线和信道引起的和、差通道相移相同,即φ1-φ2相同[8]。基于此原理,当偏馈校相时得到一个角误差信号,若此时和、差信道相位发生了变化,又得到一个新的角误差信号,对比两次数据得到差值Δφ,根据前述和、差通道相移一致性原则,对于远场波来说,其相移也变化了Δφ,只要在对标校塔的数据上加上Δφ即可[9]。
在测控船出海前,测控系统使用任务频点对标校塔校相,并记录相应的相移值φ码头塔和差斜率值K码头塔,同时进行该频点的偏馈校相结果φ码头偏馈和K码头偏馈。船在海上时,再次对该频点进行偏馈校相,记录相移值为φ海上偏馈和差斜率值K海上偏馈,由此可计算出海上实际的设备移相值和差斜率值:

由此,可计算出海上系统的角误差信号,为确保跟踪接收机能够在海上进行全频段角度标校,可以在码头将设备按一定频率间隔和不同设备组合将对塔和偏馈角误差信号标出,出海后可对任意频点和设备组合通过偏馈标校计算即可得到海上系统校相值。偏馈记忆法校相可以克服船摇带来的影响,是一种比较简单易行的方法,但由于海上温度、湿度等条件与陆地上不完全相同,得到的角跟踪值精度不是很高。
2.2 “粗校+精校”快速校相方法
由于船摇的影响,船载测控系统在跟踪目标时很容易从主波束脱离,故船载S 和X 频段测控系统均安装了引导天线,引导天线直径比主天线小很多,波束宽度比主天线宽,扫描范围比主天线大,易于发现目标且不易脱离主波束。引导天线和主天线“粗校+精校”方法一样,此处以主天线为例介绍“粗校+精校”方法,其流程如图2 所示。当船上释放的装在氦气球内部的信标球飞到一定距离后,通过脉冲雷达或光学设备引导主天线跟随,当信标球比较稳定时,主天线进行第一次快速校相,得到初步的校相值,将校相值装入主天线跟踪接收机,称为粗校相。随后通过对方位、俯仰拉偏检查相位极性和交叉耦合,如果相位极性和交叉耦合(优于3∶1)均满足要求的话,则转到主天线跟踪,否则继续进行粗校相。转主天线跟踪后,再次对主天线进行快速校相,由于此时由主天线闭环跟踪,校相值的精度会比第一次提高,称为精校相。精校相结束后,主天线脱离跟踪,将精校相的结果装入主跟踪接收机,通过拉偏方位、俯仰检查相位极性,如果相位极性正确且交叉耦合满足要求(优于5∶1),则校相结果满足要求,结束主天线校相,否则重新进行精校相[10]。
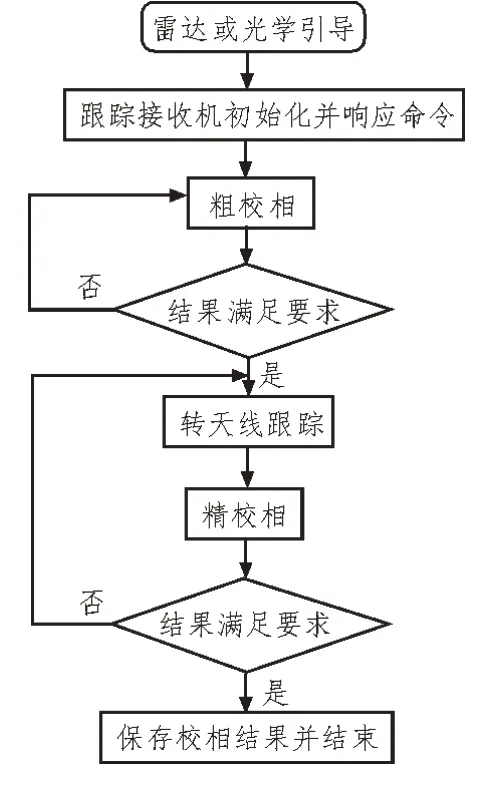
图2 粗校加精校一般流程
基于氦气球搭载信标球配合天线粗校加精校相的方法克服了船载系统出海后无标校塔的困难,校相结果也比较好,但装在氦气球内部的信标球不受控,每次放氦气球加信标球需消耗人力物力,且氦气球加信标球为一次消耗品,存在浪费及环境污染问题。
2.3 无人机海上校相可行性分析
随着无人机技术的发展,可考虑使用无人机搭载信标球的方式创造类似于标校塔的环境进行校相。
用无人机搭载信标球进行校相需考虑无人机承载重量,无人机悬停精度、无人机飞行时间及最远控制距离。无人机承载重量指无人机需搭载电池和信标球的重量,重量过大可能影响飞行高度及飞行时间。悬停精度指无人机悬停在某一地方后相对于静止参考点的摆动幅度,如果摆幅过大则会偏出天线波束的3 dB 带宽[11-13]。最远控制距离决定了信标球是否满足远场条件,天线在不同距离下的照射范围如表1 所示。船载测控系统目前有S/X 频段,为具备扩展性和实用性,同时考虑Ka波段。
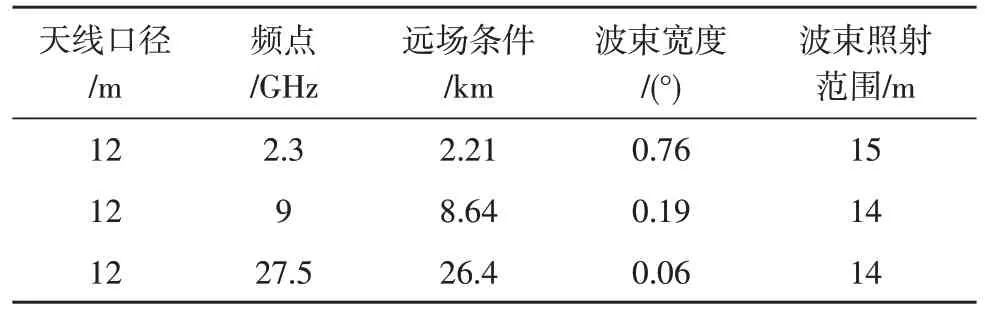
表1 天线波束在不同距离下的照射范围
根据苏勋和李蝉等人的进场校相研究成果,在天线近场大于1/4 远场条件时,校相结果可用[14-20]。根据此研究成果,无人机悬停在1/4远场距离处即可。
由表2可看出,只要无人机悬停精度不超过3.45 m,就在主波束范围内,即可满足校相要求。初步考虑无人机到达及返回指定点的时间为10 min,悬停时间10 min,则无人机至少需要飞行20 min。

表2 天线波束在1/4远场距离处的照射范围
信标球重量约为0.8 kg,则无人机承载重量需大于0.8 kg。Ka 频段1/4 远场条件为6.6 km,则无人机必须在6.6 km 外受控制。
从表3 可看出,所选的几款国内无人机在悬停精度、悬停时间和载荷能力上均满足使用需求,但仅有两款满足最远控制距离的控制要求,在使用时还要考虑风速对悬停精度的影响,尽量选择风平浪静的天气进行无人机校相。
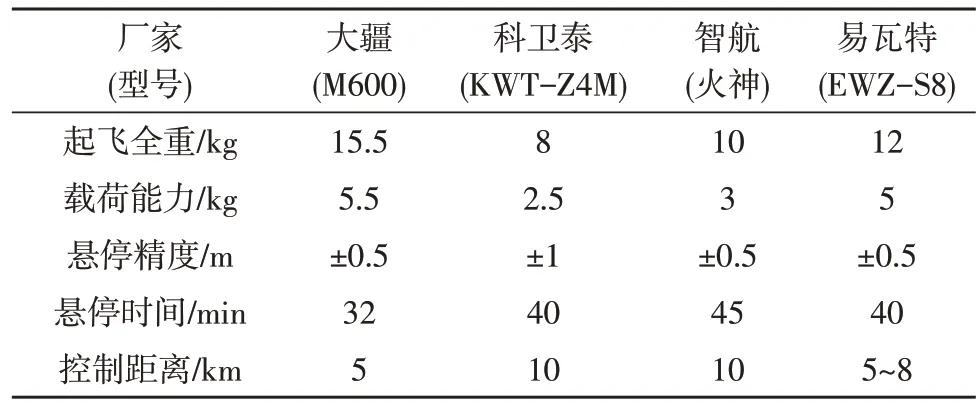
表3 国内几款无人机性能指标
综上分析,可得出如下结论:无人机搭载信标球校相方法可以在船载测控系统上使用。该方法可以取代使用氦气装载信标球的方法,使信标球可控。但该方法有一个风险,当无人机故障或失控后会掉在海里找不回来。
3 结束语
该文介绍了船载测控系统常用的偏馈记忆校相法和基于氦气球加信标球的粗校加精校的校相方法,并分析了无人机校相法在船载系统使用的可行性,根据分析结果,某些无人机可用于海上标校。每种校相方法都各有优缺点,在使用时可根据现场实际情况来选择适合的校相方法。
猜你喜欢
科学技术创新(2021年11期)2021-05-25
廉政瞭望(2020年17期)2020-11-17
电子制作(2019年7期)2019-04-25
测控技术(2018年9期)2018-11-25
宇航计测技术(2018年3期)2018-09-08
低温与特气(2016年4期)2016-09-19
环球时报(2016-06-30)2016-06-30
火控雷达技术(2016年2期)2016-02-06
海军航空大学学报(2015年4期)2015-02-27
中国舰船研究(2014年6期)2014-05-14
