
速度反馈对多自由度微陀螺非线性影响的控制
2021-06-10 01:12郝淑英宋宇昊李伟雄张琪昌刘君冯晶晶
振动工程学报 2021年2期
郝淑英 宋宇昊 李伟雄 张琪昌 刘君 冯晶晶


摘要: 为揭示多自由度微陀螺非线性系统中速度反馈项对系统动力学特性的影响规律,探索减小或消除非线性影响的控制方法,以一类4自由度静电驱动微机械陀螺为研究对象,应用多尺度法分析了时滞速度反馈控制反馈增益对微陀螺输出响应的影响规律。研究发现:时滞量为零的条件下,反馈增益主要影响幅值大小;正的速度反馈增益会放大非线性的影响,系统出现新的不稳定区域,灵敏度稳定性遭到严重破坏;负的速度反馈增益对刚度非线性的影响有很好的控制作用,通过负增益的合理取值可完全消除剛度非线性的影响;提出了一种在不降低灵敏度的前提下利用速度反馈增益调阻作用来控制微陀螺灵敏度稳定性的方法,此方法为含刚度非线性多自由度微陀螺动态性能的优化和控制提供了理论依据。
关键词: 非线性振动; 多自由度微陀螺; 多尺度法; 速度反馈; 刚度非线性
中图分类号: O322; O318.2; TP271+.9 文献标志码: A 文章编号: 1004-4523(2021)02-0227-08
DOI:10.16385/j.cnki.issn.1004-4523.2021.02.002
引 言
1988年,美国德雷伯实验室研制出了世界上第一款微机械陀螺?双框架式微机械陀螺仪[1],在随后的研究中发现微陀螺系统存在明显的非线性行为,其中刚度非线性和静电力非线性最为常见。这些非线性因素会导致微陀螺出现明显的频率偏移、多稳态解、刚度的软硬化特征以及软硬特性过渡[2],发生分岔甚至混沌等振荡不稳定现象[3],对微陀螺的灵敏度、带宽和稳定性造成极大影响。为了提升微陀螺的精度、灵敏度和鲁棒性等动态性能,时滞反馈控制[4]被广泛应用到微陀螺系统中。时滞信号主要分为位移信号、速度信号[5]和加速度信号[6]三种,通过设计合适的时滞反馈控制器实现对系统稳定性的控制。Mehta等[7]利用位移正反馈振荡器实现了微悬臂梁频率输出的控制,提高了基于微悬臂梁的化学和生物传感器的灵敏度。李欣业等[8?9]对Duffing?van del Pol振子的动力学响应和时滞反馈问题进行了深入的研究,通过线性和非线性时滞反馈以及双时滞反馈实现了对系统零解稳定性、极限环稳定性和振幅的控制。Morrison等[10]研究了时滞非线性Mathieu方程的动力学行为,研究发现通过施加足够大的反馈增益和选择适当的时间滞后量可以消除与参激相关的不稳定区域;在无阻尼系统中引入时滞项可加入有效阻尼。Alsaleem等[11]通过在直流和交流电压驱动的MEMS谐振器中使用时滞反馈控制器,发现可将在动态吸合频带中工作的原本不稳定的部分变成稳定状态,且在吸合附近对谐振器稳定性有较强的增强作用。张丽娟[12]分别研究了刚度非线性下单自由度微陀螺在受迫振动和参数激励下的时滞反馈问题,分析了不同反馈增益对系统振幅的影响。Warminski[13]研究了由外部激励和时滞输入驱动的非线性自激和参激MEMS器件的振动,给出了频率锁定区域的确定方法和闭环控制的策略。程春等[14]提出了一种时滞立方位移反馈控制方法,发现施加反馈参数能够有效地减小隔振系统共振区的位移传递率。李帅等[15]提出了一种时变参数时滞减振控制方法来改善时滞动力吸振器的性能,发现反馈参数对系统的位移、速度和加速度幅值均有很好的控制作用。上述研究主要集中在微谐振器、单自由度微陀螺、隔振器和动力吸振器,对多自由度微陀螺非线性系统的速度反馈的研究未见报道。
本文将研究速度反馈控制参数对微陀螺非线性动力学行为的影响,采用多尺度方法对系统非线性动力学方程进行摄动求解,通过所求的近似解析解分析4自由度微陀螺非线性系统中速度反馈项对系统动力学特性的影响规律,并通过影响规律探索对多自由度微陀螺刚度非线性的控制方法。
1 微陀螺的动力学建模
本文考虑一类典型的双驱动双检测4自由度微机械陀螺仪[16],其结构示意图如图1所示,此类微陀螺主要由驱动质量、解耦质量、转换质量、检测质量、弹性微梁以及梳齿电极组成。在图1中,x方向为驱动方向,y方向为检测方向,Ω_z为垂直于x?y平面的输入角速度,解耦质量m_f和转换质量m_2形成双级解耦结构,起到隔离驱动模态和检测模态的作用。微陀螺工作时,驱动质量m_1在梳齿驱动电极的作用下沿x方向振动,解耦质量m_f由于梁k_2的作用开始沿x方向振动,同时,转换质量m_2在梁k_4的作用下随解耦质量一起沿x方向振动;当系统在x?y平面垂直方向有角速度Ω_z输入时,由于科氏效应,x方向的振动引起y方向的谐振,转换质量m_2与检测质量m_3在梁k_4,k_5和k_6的约束下沿y方向振动。检测质量m_3在y方向的位移即为微陀螺的检测输出位移,其随着角速度Ω_z的增大而增大。正是由于结构谐振时检测输出幅值与输入角速度Ω_z成正比,因此通过测量输出幅值即可测得载体的输入角速度Ω_z。
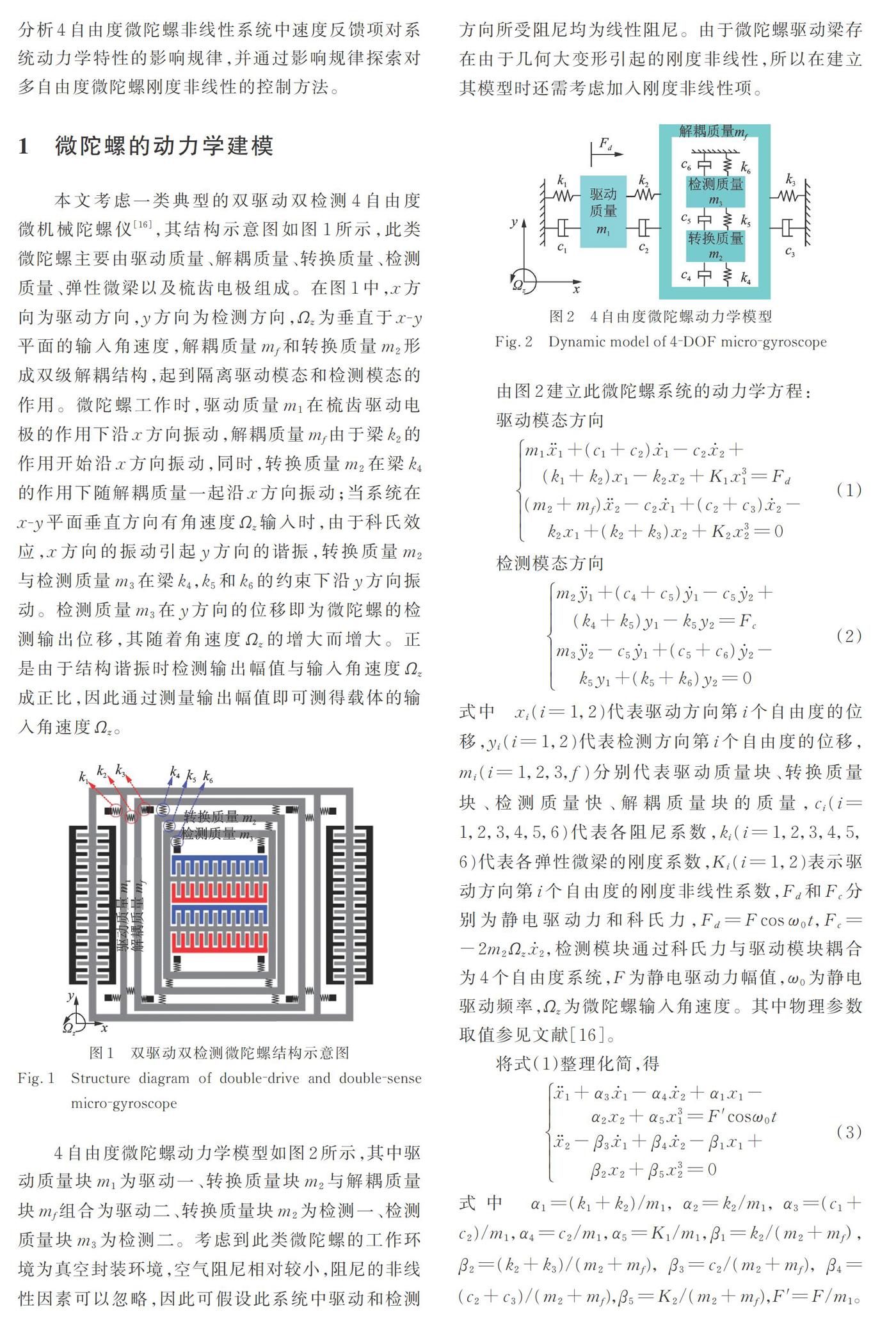
4自由度微陀螺动力学模型如图2所示,其中驱动质量块m_1为驱动一、转换质量块m_2与解耦质量块m_f组合为驱动二、转换质量块m_2为检测一、检测质量块m_3为检测二。考虑到此类微陀螺的工作环境为真空封装环境,空气阻尼相对较小,阻尼的非线性因素可以忽略,因此可假设此系统中驱动和检测方向所受阻尼均为线性阻尼。由于微陀螺驱动梁存在由于几何大变形引起的刚度非线性,所以在建立其模型时还需考虑加入刚度非线性项。
3 反馈增益对动态响应的影响
本节主要考虑速度反馈增益对微陀螺动态响应的影响,忽略时间滞后的影响,因此令时间滞后参数τ=0,分析不同的反馈增益对微陀螺幅频响应的影响情况。分别取G=-350,0,350(即负增益、无增益和正增益)三种情况进行分析比较。
计算参数选取如下:激振力幅值F=3×〖10〗^(-5) N,ε=1,驱动一、二的共振频率分别为ω_1=30940.1 rad/s,ω_2=31880.9 rad/s。此时σ_2=5.91×〖10〗^7,本文只考虑主共振下微陀螺的响应情况。根据式(12),(13)并结合式(14),得到微陀螺各自由度的稳态幅频响应,如图4所示。为了验证多尺度法得到的理论解析解,对式(1)使用Runge?Kutta方法进行求解,得到了一系列数值结果,对比理论解可见有较好的吻合度。
当反馈增益值G=-350时,微陀螺各自由度的幅值均低于G=0时的幅值,两峰值及其之间区域趋于平坦,刚度非线性表现出的硬化、幅值跳跃以及多稳态解现象基本消失,不稳定情况不再存在。当G=350时,微陀螺各自由度的幅值均高于G=0时的幅值,由于存在刚度非线性的影响,幅值增长幅度极为显著,非线性特征也变得更为明显;两峰值之间部分的幅值相差很大,灵敏度稳定性遭到严重破坏(灵敏度与响应幅值的大小正相关,响应幅值在一定的频率范围内越稳定意味着微陀螺灵敏度的稳定越好),甚至在峰值处出现了新的不稳定区域,导致同时存在多处不稳定区域,如图4(b)和4(d)所示,对微陀螺灵敏度的稳定性造成了严重的影响。
综合图4可知,在无时间滞后时,速度反馈的增益对各自由度幅频响应的影响仅表现在对幅值大小的影响上。当速度反馈增益为负值时,稳态响应幅值和灵敏度随负增益绝对值的增加而降低,且非线性的特征也随之减弱;最终随着反馈增益值持续的减小非线性幅值跳跃、多稳态解的现象也随之消失,系统保持在稳定状态。当速度反馈增益为正值时,稳态响应幅值和灵敏度随增益值的增加而升高,非线性的特征也随之增强,系统出现新的不稳定区域,进一步导致系统的失稳。
由于在微陀螺非线性动力学方程(4)中,时滞速度反馈项作用于状态速度量,等效于系统阻尼项,因此具有控制系统阻尼的作用,也是对响应幅值的控制作用,此行为被称为时滞速度反馈控制的调阻作用[19]。
在图4(b)和(d)中,当G=-350时,驱动二与检测二的响应幅值均有較高幅值的平坦区域且对应较宽的频带范围,具有较高的灵敏度稳定性和较宽的检测带宽,这有利于微陀螺在工作中对输出信号的监测和采集,且具有较强的抗干扰能力。为了利用时滞速度控制这一特点,同时弥补其带来的灵敏度下降的缺陷,本文提出了一种考虑静电力与速度反馈增益量的综合影响,在保持灵敏度或响应幅值不降低的条件下,控制或消弱刚度非线性的影响,增加微陀螺灵敏度稳定性的方法。
4 速度反馈对灵敏度稳定性控制
由于静电力幅值是影响微陀螺响应幅值的最大因素,所以本文通过适当提高静电力以提升响应幅值使其高于设计的目标幅值,然后通过时滞速度负反馈进行控制,综合考虑灵敏度和带宽,最后使输出响应幅值达到目标幅值同时兼具高灵敏度稳定性和动态稳定性,消除刚度非线性对微陀螺灵敏度动态稳定性和带宽的影响。
为验证这一方法,首先取一固定速度反馈增益值,然后确定此增益下静电力幅值和稳态响应振幅的关系,得到响应振幅达到设计振幅时所需的静电力幅值,最后比较设计振幅与使用此静电力所得振幅值,从而确定微陀螺所需施加的静电力幅值及反馈增益值。
设速度反馈增益值仍取-350,微陀螺驱动二与检测二输出响应与静电力幅值的关系如图5所示。从图5可知未施加速度反馈时驱动二输出的最大幅值为3×〖10〗^(-6)(原响应),检测二输出的最大幅值为4.3×〖10〗^(-9),也是该微陀螺的灵敏度最大值。依据图5(a)可知驱动输出响应达到此最大峰值所需的静电力幅值为5.05×〖10〗^(-5) N,即只要施加该静电力值,那么驱动二在速度反馈控制条件下仍可获得相应的灵敏度;同理,依据图5(b)中检测二输出响应可知,达到检测2最大峰值所需的静电力幅值为4.66×〖10〗^(-5) N。由此得到了两个满足条件的静电力幅值,但需通过对比两种情况下微陀螺的动态特性筛选出最佳控制方案。
当静电力幅值取5.05×〖10〗^(-5) N时,无速度反馈和施加速度反馈控制条件下驱动输出幅频响应和检测输出幅频响应关系如图6所示。
由图6可知,当静电力幅值为5.05×〖10〗^(-5) N时,施加速度控制后的驱动输出响应的峰值和原驱动输出响应峰值达到一致,均为3×〖10〗^(-6) m,而优化后的检测输出响应峰值超过了原检测输出响应峰值。驱动和检测的输出带宽在优化前后基本保持不变,在带宽范围内仍然不会受到非线性不稳定区域的影响;共振峰由两个峰变为一个峰,灵敏度稳定性较控制之前明显提高;由于静电力幅值的提升,共振区外的稳定部分幅值也有所提高。另外,优化后非线性的影响被削弱,不稳定区域变小且远离带宽范围,对系统稳定性的提升起到了重要作用。
当静电力幅值取4.66×〖10〗^(-5) N时,驱动输出幅频响应和检测输出幅频响应与原响应的对比关系如图7所示。
由图7可知,当静电力幅值为4.66×〖10〗^(-5) N时,优化后的检测输出响应的峰值和原检测响应峰值相同,均为4.3×〖10〗^(-9) m,而优化后的驱动输出响应峰值略低于原驱动输出响应峰值。与图6的特征类似,驱动和检测的输出带宽在优化前后基本保持不变,在带宽范围内仍不受非线性不稳定区域的影响;共振峰由两个峰变为一个峰,灵敏度稳定性较优化前明显提高,共振区外的稳定部分幅值也有所提高;优化后非线性的影响也被削弱,不稳定区域变小且远离带宽范围,对系统稳定性的提升起到了作用。
在图6和7中,由于共振峰均变为一个峰,因此在设定微陀螺操作频率时可直接设定为共振峰值的对应频率,可在保证稳定的前提下获得最大的灵敏度。
静电力幅值为5.05×〖10〗^(-5) N时,驱动和检测输出响应的峰值均稍高于静电力幅值为4.66×〖10〗^(-5) N时的情况,这是外界传递能量高低所决定的。这两种情况下的检测输出响应峰值均不低于原响应峰值,都可满足微陀螺的工作需要,且两种静电力幅值下对带宽、非线性稳定性影响基本相同,均可在保证检测带宽的前提下提升系统对刚度非线性的抗性、提高驱动检测响应的灵敏度稳定性。虽然静电力在5.05×〖10〗^(-5) N时响应幅值稍高,但相比于原静电力幅值增长了68.35%,牺牲了较大的驱动力,而静电力在4.66×〖10〗^(-5) N时相比于原静电力幅值增长了55.38%,增长幅度比前者小,因此综合考虑驱动力能量和性能,应选择静电力为4.66×〖10〗^(-5) N的控制方法, 即根据检测二的静电力与输出幅值的关系确定静电力激振力的幅值。
通過上述比较,在无时滞、速度反馈增益一定时,通过适当提升静电力幅值可使微陀螺的输出响应在同等灵敏度和带宽下获得更好的灵敏度稳定性和非线性抵抗能力。
5 结 论
1)提出了一种利用速度反馈增益调阻作用来控制微陀螺响应幅值的方法。该方法通过协调静电力幅值和速度负反馈增益的综合作用,在稳定微陀螺输出灵敏度的同时提高其灵敏度稳定性,削弱非线性影响。
2)速度反馈增益对微陀螺幅频响应的影响仅表现在对幅值大小的影响上。反馈增益为负值时,稳态响应幅值和灵敏度随负增益绝对值的增加而降低,且非线性的特征也随之减弱;最终随着反馈增益值持续的减小,非线性幅值跳跃、多稳态解的现象也随之消失,系统保持在稳定状态。因此,通过负增益的合理取值可完全消除刚度非线性的影响。正的速度增益会放大非线性的影响,系统出现新的不稳定区域,灵敏度稳定性遭到严重破坏。
参考文献:
[1] Boxenhorn B, Greif P. A vibratory micromechanical gyroscope[C]. AIAA Guidance, Navigation and Control Conference, Minneapolis, MN, USA, 1988:1033-1040.
[2] Tatar E, Mukherjee T, Fedder G K. Nonlinearity tuning and its effects on the performance of a MEMS gyroscope[C]. 2015 18th International Conference on Solid-state Sensors, Actuators and Microsystems, 2015: 1133-1136.
[3] Han J X, Zhang Q C, Wang W. Static bifurcation and primary resonance analysis of a MEMS resonator actuated by two symmetrical electrodes[J]. Nonlinear Dynamics, 2015, 80(3): 1585-1599.
[4] Shao S, Masri K M, Younis M I. The effect of time-delayed feedback controller on an electrically actuated resonator[J]. Nonlinear Dynamics, 2013, 74(1-2): 257-270.
[5] Yamasue K, Hikihara T. Control of microcantilevers in dynamic force microscope using time delayed feedback[J]. Review of Scientific Instruments, 2006, 77(5): 53703.
[6] Nayfeh A H, Nayfeh N A. Time-delay feedback control of lathe cutting tools[J]. Journal of Vibration and Control, 2011, 18(8): 1106-1115.
[7] Mehta A, Cherian S, Hedden D, et al. Manipulation and controlled amplification of Brownian motion of microcantilever sensors[J]. Applied Physics Letters, 2001, 78(11): 1637-1639.
[8] 李欣业,陈予恕,吴志强. 参数激励Duffing-Van del Pol振子的动力学响应及反馈控制[J]. 应用数学和力学, 2006, 27(12): 1387-1396.
LI Xin-ye, CHEN Yu-shu, WU Zhi-qiang. Response of a parametrically excited Duffing-Van der Pol oscillator with delayed feedback[J]. Applied Mathematics and Mechanics, 2006, 27(12): 1387-1396.
[9] 李欣业,张振民,张华彪. Duffing-Van del Pol振子的时滞反馈控制研究[J].振动与冲击,2010,29(10): 118-121.
LI Xin-ye, ZHANG Zhen-min, ZHANG Hua-biao. Feedback control with time delay on Duffing-Van der Pol oscillators[J]. Journal of Vibration and Shock, 2010,29(10): 118-121.
[10] Morrison T M, Rand R H. 2∶1 resonance in the delayed nonlinear Mathieu equation[J]. Nonlinear Dynamics, 2007, 50(1-2): 341-352.
[11] Alsaleem F M, Younis M I. Stabilization of electrostatic MEMS resonators using a delayed feedback controller[J]. Smart Materials and Structures, 2010, 19(19): 35016.
[12] 张丽娟.微陀螺系统非线性动力学及其时滞反馈控制[D].天津:河北工业大学, 2011.
ZHANG Li-juan. Nonlinear dynamics and delayed feedback control of micro-gyroscope system[D]. Tianjin: Hebei University of Technology, 2011.
[13] Warminski J. Frequency locking in a nonlinear MEMS oscillator driven by harmonic force and time delay[J]. International Journal of Dynamics and Control, 2015, 3(2): 122-136.
[14] 程 春,李舜酩,王 勇,等.时滞立方位移反馈控制的高静低动刚度隔振器动力学分析[J]. 振动与冲击, 2017,36(13):110-115,165.
CHENG Chun, LI Shun-ming, WANG Yong, et al. Dynamic analysis of a high-static-low-dynamic stiffness vibration isolator with time-delay cubic displacement feedback control[J]. Journal of Vibration and Shock, 2017,36(13):110-115,165.
[15] 李 帅,周继磊,任传波,等.时变参数时滞减振控制研究[J].力学学报,2018,50(1):99-108.
LI Shuai, ZHOU Ji-lei, REN Chuan-bo, et al. The research of time delay vibration control with time-varying parameters[J]. Chinese Journal of Theoretical and Applied Mechanics, 2018,50(1):99-108.
[16] Wang W, Lü X, Sun F. Design of micromachined vibratory gyroscope with two degree-of-freedom drive-mode and sense-mode[J]. IEEE Sensors Journal, 2012, 12(7): 2460-2464.
[17] Alsaleem F M, Younis M I, Ouakad H M. On the nonlinear resonances and dynamic pull-in of electrostatically actuated resonators[J]. Journal of Micromechanics and Microengineering, 2009, 19(4): 045012.
[18] Shao S, Masri K M, Younis M I. The effect of time-delayed feedback controller on an electrically actuated resonator[J]. Nonlinear Dynamics, 2013, 74(1-2): 257-270.
[19] 韓建鑫.一类双极板静电驱动微梁谐振器的非线性振动及其控制研究[D].天津:天津大学,2016.
HAN Jian-xin. Nonlinear vibration and control analyses of a class of microbeam-based resonators actuated by two electrodes[D]. Tianjin: Tianjin University,2016.
Control of the nonlinear effect of velocity feedback on multi-DOF micro gyroscope
HAO Shu-ying1,2, SONG Yu-hao1,2, LI Wei-xiong1,2, ZHANG Qi-chang3, LIU Jun4,
FENG Jing-jing1,2
(1. Tianjin Key Laboratory of Advanced Electromechanical System Design and Intelligent Control, Tianjin University of
Technology, Tianjin 300384, China; 2. National Experimental Teaching Demonstration Center of Mechanical and
Electrical Engineering, Tianjin University of Technology, Tianjin 300384, China; 3. Tianjin Key Laboratory of
Nonlinear Dynamics and Control, Tianjin University, Tianjin 300072, China; 4. Zhengzhou Yutong Heavy
Industry Co. Ltd., Zhengzhou 450001, China)
Abstract: To reveal the effect of velocity feedback on dynamic characteristics of multi-DOF micro-gyroscope nonlinear systems and explore control methods for nonlinearity, a class of 4-DOF electrostatically driven micro-gyroscopes is researched. The effect of the gain of the delay velocity feedback control on output response of micro-gyroscope is analyzed by multi-scale method. The research shows that the feedback gain mainly affects the amplitude when the time delay is zero. Positive velocity feedback gain amplifies the effect of nonlinearity and new unstable regions appear in the system, then the sensitivity stability is seriously damaged. The stiffness nonlinearity can be controlled well by negative velocity feedback gain and completely eliminated by the reasonable value of negative velocity feedback gain. A method for controlling the sensitivity stability of micro-gyroscopes by adjusting damping action of velocity feedback gain without reducing sensitivity is proposed, which provides a theoretical basis for the optimization and control of multi-DOF micro-gyroscopes with stiffness nonlinearity.
Key words: nonlinear vibration; multi-DOF micro-gyroscope; multi-scale method; velocity feedback; stiffness nonlinearity
作者簡介: 郝淑英(1962-),女,教授。电话:15122792706;E-mail: syhao@tju.edu.cn
通讯作者: 冯晶晶(1986-),女,副教授。电话:13652038139;E-mail: jjfeng@tju.edu.cn
